Synopsa hry na hranie rolí „Hra na sladké kaviarne: „Vezmi si hudobnú stoličku“
Svetlana Furshtakova Synopsa hry na hranie rolí v strednej skupine "Kaviareň" 1. Úlohy: 1. Pokračovať v oboznamovaní detí s ...
Vynález sa týka oblasti presného prístrojového vybavenia a môže byť použitý pri výrobe a prevádzke inerciálnych navigačných systémov na elektrostatických gyroskopoch. Podstata vynálezu: podľa výsledkov zmien driftov rotora gyroskopu pri dvoch rýchlostiach rotora pri dvoch polohách rotora vo vákuovej komore sa určí nominálna rýchlosť rotora, pri ktorej sa stane integrálnou sférickou (nominálna rýchlosť). ÚČINOK: vynález umožňuje znížiť vplyv takých faktorov, ako je nestabilita závesných sledovacích systémov, náboj rotora, chyba sledovacích systémov odpočítania uhlovej polohy na driftoch rotora elektrostatického gyroskopu, čo zvyšuje presnosť gyroskopu . 1 chorý.
Vynález sa týka oblasti presného prístrojového vybavenia a možno ho použiť pri výrobe a prevádzke inerciálnych navigačných systémov na elektrostatických gyroskopoch (ESG) s tenkostenným rotorom, ktorého povrch je vytvorený vo forme elipsoidu pretiahnutého k palice.
Je známy spôsob, ako výpočtom zistiť veľkosť rozdielu medzi osami takéhoto elipsoidu, takže pri otáčaní nominálnou frekvenciou sa tvar jeho povrchu pôsobením odstredivých síl stáva guľovitým. Metóda je opísaná v článku Yu.G. Martynenka a V.V. Podalkova „Asférizácia dutého rotora elektrostatického gyroskopu“ (zborník „Gyroskopia a navigácia“, vydanie 2, 1997).
Ďalšia prevádzka gyroskopu sa vykonáva pri vypočítanej rýchlosti rotora. Tento spôsob je prijatý ako prototyp tohto vynálezu.
Nevýhodou tejto metódy je, že výpočet nezohľadňuje množstvo faktorov, ktoré ovplyvňujú presnosť určenia otáčok rotora, pri ktorých je necitlivý na zmeny podromotorických síl. Tieto faktory by mali zahŕňať:
Rozptyl parametrov materiálu rotora zahrnutých vo výpočtových vzorcoch (hustota, modul pružnosti atď.);
Tolerančné pole pri výrobe rotora;
Vplyv na presnosť ESG vyšších harmonických tvaru povrchu rotora.
Všetky tieto faktory znižujú potenciálnu presnosť ESG, as rozpor medzi tvarom povrchu rotora a guľou vedie k vzniku momentu z pôsobenia ponderomotorických síl smerujúcich pozdĺž normály k povrchu a v dôsledku toho k výskytu driftov gyroskopu.
Je známe (monografia Yu.G. Martynenka „Pohyb tuhého telesa v elektrických a magnetických poliach“, Moskva, „Nauka“, 1998), že pri lineárnom posune nesférického rotora ESG vzhľadom na závesné elektródy, jeho úniková rýchlosť sa mení v dôsledku prerozdelenia ponderomotorických síl po povrchu. Ak nedôjde k žiadnej zmene v únikovej rýchlosti pri lineárnom posune rotora, malo by sa zvážiť, že ESG je invariantné k zmene podromotorických síl, t.j. rotor takéhoto ESG je integrálne sférický.
Cieľom tohto vynálezu je určiť rýchlosť otáčania rotora, pri ktorej sa stane integrálne sférickým (nominálna rýchlosť otáčania), čo znižuje vychyľovacie momenty od podromotorických síl, a preto zvyšuje presnosť gyroskopu.
Problém je vyriešený postupnosťou operácií:
1. ESG je inštalované v zariadení, ktoré umožňuje určiť rýchlosť odjazdu rotora (napríklad v gyroorientátore), takže os rotácie rotora je v rovine zemského rovníka.
2. Rotor sa odváži vo vákuovej komore pomocou priestorového závesného systému a urýchli sa na konštrukčnú rýchlosť f 1 .
3. Zariadenie, v ktorom je ESG nainštalované, je uvedené do prevádzky.
4. Určte rýchlosť odletu rotora n 11 akumulovaným uhlom v rovine zemského rovníka.
5. Rotor sa premiestňuje vo vákuovej komore pozdĺž osi umiestnenej pozdĺž osi otáčania rotora zavedením dodatočného elektrického napätia na vstup servo súradnicového systému závesu pozdĺž tejto osi.
6. Určte rýchlosť odjazdu rotora n 12 .
7. Zrýchlite rotor na rýchlosť f 2 .
8. Určte rýchlosť odjazdu rotora n 21 .
9. Odstráňte dodatočné elektrické napätie.
10. Určte rýchlosť odjazdu rotora n 22 .
11. Vypočítajte menovitú rýchlosť rotora, pri ktorej sa stane integrálnou sférou, podľa vzorca:
12. Nastavte otáčky rotora na nominálnu hodnotu.
Odvodenie vzorca je znázornené na výkrese, kde je uvedené:
f 1 - odhadovaná rýchlosť rotora;
f 2 - otáčky rotora po zrýchlení (brzdení);
f n - rýchlosť rotora, pri ktorej sa stáva integrálne sférickým;
A, B, C, D, E - vrcholy trojuholníkov;
(n 12 - n 11) - rozdiel v rýchlosti odchodu rotora po a pred lineárnym posunom pri frekvencii otáčania rotora f 1 ;
(n 22 -n 21) - rozdiel v rýchlosti odchodu rotora po a pred lineárnym posunom pri frekvencii otáčania rotora f 2 .
Z podobnosti trojuholníkov ABD a ACE:
Vyriešením tohto podielu získame vyššie uvedený vzorec.
V podniku Ústredného výskumného ústavu Elektropribor bolo navrhnuté technické riešenie zrealizované.
ESG je inštalované v dvojosovom gyrostabilizátore, rotor ESG je vážený vo vákuovej komore pomocou trojosového servosystému, roztáča sa až na vypočítanú rýchlosť otáčania (f 1) určenú konštrukčnou dokumentáciou, pomocou tlmiacej cievky, os rotora je nastavená na rovníkovú rovinu Zeme. Potom sa zapnú sledovacie systémy kardanových krúžkov, sleduje sa pohyb rotora a z akumulovaného uhla sa určí úniková rýchlosť pri vypočítanej rýchlosti otáčania (n 11). Potom sa rotor posunie pozdĺž osi otáčania pomocou dodatočného elektrického napätia privedeného do súradnice servosystému zavesenia rotora, ktoré riadi jeho lineárny pohyb pozdĺž osi otáčania, a opäť sa určí rýchlosť driftu. pri vypočítanej frekvencii otáčania (n 12).
V ďalšej operácii sa rotor zrýchli na rýchlosť vyššiu ako vypočítaná (f 2), rýchlosť driftu rotora sa zmeria (n 21) pri frekvencii vyššej ako vypočítaná, po ktorej sa odstráni prídavné elektrické napätie a znovu sa určí rýchlosť driftu rotora (n 22).
Podľa vzorca (1) sa zistí nominálna rýchlosť rotora (f n) a rýchlosť rotora sa privedie na nominálnu rýchlosť (f n).
Implementácia tejto metódy v Ústrednom výskumnom ústave "Elektropribor" umožnila zvýšiť presnosť ESG o 3-5 krát.
Technickou a ekonomickou účinnosťou vynálezu je zlepšiť presnosť ESG.
Vzhľadom na nedostatok informácií o potrebách krajiny na počet takýchto gyroskopov nie je možné vypočítať ekonomický efekt vynálezu.
Spôsob stanovenia nominálnych otáčok rotora elektrostatického gyroskopu obsahujúceho tenkostenný rotor, ktorého vonkajší povrch je vytvorený vo forme elipsoidu rotácie rozšíreného k pólom s vypočítanou hodnotou rozdielu medzi osami. elipsoidu, ktorý spočíva v tom, že elektrostatický gyroskop je inštalovaný v zariadení, ktoré umožňuje určiť rýchlosť driftu rotora, os rotácie rotora je nastavená v rovine zemského rovníka, rotor je zvážený v r. vákuová komora využívajúca priestorový servozávesný systém, rotor sa zrýchli na vypočítanú rýchlosť otáčania f 1, po uvedení zariadenia, v ktorom je gyroskop nainštalovaný, do prevádzkového režimu, sa rýchlosť driftu n 11 určí z akumulovaného uhla v rovina zemského rovníka, vyznačujúca sa tým, že rotor je posunutý v smere osi rotácie zavedením dodatočného elektrického napätia na vstup servo súradnicového systému zavesenia umiestneného pozdĺž osi rotácie rotora, rýchlosť odjazdu rotora sa meria n 12, zrýchlite rotor na rýchlosť f 2, zmerajte rýchlosť driftu n 21, odstráňte dodatočné elektrické napätie, zmerajte rýchlosť driftu rotora n 22, určte nominálnu rýchlosť rotora podľa vzorca
a uveďte otáčky rotora na nominálnu hodnotu.
Charakteristika indukčné motory. Pre správna prevádzka asynchrónneho motora je potrebné poznať jeho vlastnosti: mechanické a pracovné.
Mechanická charakteristika. Závislosť rýchlosti rotora od zaťaženia (krútiaci moment na hriadeli) sa nazýva mechanická charakteristika indukčného motora (obr. 262, a). Pri menovitom zaťažení sú otáčky pre rôzne motory zvyčajne 98 – 92,5 % otáčok n 1 (sklz s nom = 2 – 7,5 %). Čím väčšie je zaťaženie, teda krútiaci moment, ktorý musí motor vyvinúť, tým nižšie sú otáčky rotora. Ako ukazuje krivka
na obr. 262, a, rýchlosť otáčania asynchrónneho motora len mierne klesá so zvyšujúcim sa zaťažením v rozsahu od nuly po najvyššiu hodnotu. Preto sa o takomto motore hovorí, že má tuhú mechanickú charakteristiku.
Motor vyvinie najväčší krútiaci moment M max pri určitom sklze s kp 10-20%. Pomer M max / M nom určuje kapacitu preťaženia motora a pomer M p / M nom určuje jeho štartovacie vlastnosti.
Motor môže pracovať stabilne len vtedy, ak je zabezpečená samoregulácia, t.j. automatická rovnováha medzi momentom zaťaženia M ext pôsobiacim na hriadeľ a momentom M vyvinutým motorom. Tento stav zodpovedá hornej časti charakteristiky, kým sa nedosiahne M max (až po bod B). Ak moment zaťaženia M ext prekročí moment M max, potom motor stratí stabilitu a zastaví sa, zatiaľ čo vinutiami stroja prejde prúd 5-7-násobok menovitého prúdu a môžu sa spáliť.
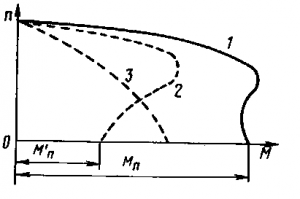
Keď je v obvode vinutia rotora zahrnutý štartovací reostat, získame rodinu mechanických charakteristík (obr. 262, b). Charakteristika 1, keď motor beží bez štartovacieho reostatu, sa nazýva prirodzený. Charakteristiky 2, 3 a 4, získané pripojením reostatu s odpormi R 1p (krivka 2), R 2p (krivka 3) a R 3p (krivka 4) k vinutiu rotora motora, sa nazývajú reostatické mechanické charakteristiky. Keď je štartovací reostat zapnutý, mechanická charakteristika sa stáva mäkšou (strmšie klesá), keď sa zvyšuje aktívny odpor rotorového okruhu R 2 a s kp sa zvyšuje. Zároveň sa znižuje štartovací prúd. Rozbehový krútiaci moment Mp tiež závisí od R 2 . Odpor reostatu môžete zvoliť tak, aby sa počiatočný krútiaci moment M p rovnal najväčšiemu M max.
V motore so zvýšeným rozbehovým momentom sa prirodzená mechanická charakteristika svojou formou približuje charakteristike motora so zapnutým štartovacím reostatom. Krútiaci moment motora s dvojitou kotvou nakrátko sa rovná súčtu dvoch krútiacich momentov generovaných pracovnou a štartovacou klietkou. Preto možno charakteristiku 1 (obr. 263) získať sčítaním charakteristík 2 a 3 vytvorených týmito bunkami. Štartovací krútiaci moment Mp takéhoto motora je oveľa väčší ako moment M 'p bežného motora motor vo veveričke. Mechanický výkon motora s hlbokou drážkou je rovnaký ako u motora s dvojitou veveričkou.
Prevádzkové vlastnosti. Výkonové charakteristiky asynchrónneho motora sú závislosti rýchlosti otáčania n (alebo sklzu s), krútiaceho momentu na hriadeli M 2, prúdu statora I 1 účinnosť? a cos? 1, z užitočného výkonu P 2 \u003d P mx pri nominálnych hodnotách napätia U 1 a frekvencie f 1 (obr. 264). Sú stavané len pre zónu praktickej stabilnej prevádzky motora, t.j. od sklzu rovného nule po sklz presahujúci nominálny o 10-20%. Rýchlosť otáčania n so zvýšením výstupného výkonu P2 sa mení len málo, rovnako ako aj mechanická charakteristika; krútiaci moment na hriadeli M 2 je úmerný výkonu P 2, je menší ako elektromagnetický krútiaci moment M o hodnotu brzdného momentu M tr vytvoreného trecími silami.
Prúd statora I 1 sa zvyšuje so zvyšujúcim sa výkonom, ale pri P 2 \u003d 0 existuje určitý prúd naprázdno I 0. Účinnosť sa mení približne rovnakým spôsobom ako v transformátore, pričom si zachováva pomerne veľkú hodnotu v relatívne širokom rozsahu zaťaženia.
Najvyššia hodnota účinnosti pre asynchrónne motory stredného a vysokého výkonu je 0,75-0,95 (stroje s vysokým výkonom majú zodpovedajúcu vyššiu účinnosť). účinník cos? 1 asynchrónne motory stredného a vysokého výkonu pri plnom zaťažení je 0,7-0,9. Preto sa zaťažujú nabíjacie stanice a siete s významnými jalovými prúdmi (od 70 do 40 % menovitého prúdu), čo je významnou nevýhodou týchto motorov.
Pri zaťaženiach 25-50% nominálnej hodnoty, s ktorými sa často stretávame pri prevádzke rôznych mechanizmov, sa účinník znižuje na neuspokojivé hodnoty z energetického hľadiska (0,5-0,75).
Po odstránení záťaže z motora sa účinník zníži na hodnoty 0,25-0,3, preto nie je možné povoliť prevádzku asynchrónnych motorov pri voľnobehu a výraznom nízkom zaťažení.
Práca pri nízkom napätí a prerušenie jednej z fáz.
Zníženie sieťového napätia nemá významný vplyv na otáčky rotora indukčného motora. V tomto prípade je však maximálny krútiaci moment, ktorý môže asynchrónny motor vyvinúť, výrazne znížený (keď napätie klesne o 30%, zníži sa asi 2 krát). Preto pri výraznom poklese napätia sa motor môže zastaviť a pri nízkom napätí sa nemusí spustiť.
Na e. p.s. striedavý prúd s poklesom napätia v kontaktnej sieti, napätie v trojfázová sieť, ktorý napája asynchrónne motory, ktoré poháňajú pomocné stroje (ventilátory, kompresory, čerpadlá). Aby bola zabezpečená normálna prevádzka asynchrónnych motorov pri zníženom napätí (mali by pracovať normálne, keď napätie klesne na 0,75U nom), výkon všetkých motorov pomocných strojov je napr. p.s. sa odoberá približne 1,5-1,6 krát väčšia, ako je potrebná na ich pohon pri menovitom napätí. Takáto rezerva výkonu je potrebná aj z dôvodu určitej asymetrie fázové napätia, keďže pri e. p.s. asynchrónne motory nie sú poháňané trojfázový generátor, ale z fázového rozdeľovača. Pri asymetrii napätia nebudú fázové prúdy motora rovnaké a fázový posun medzi nimi nebude rovný 120 °. V dôsledku toho bude jednou z fáz pretekať väčší prúd, čo spôsobí zvýšené zahrievanie vinutí tejto fázy. To núti obmedziť zaťaženie motora v porovnaní s jeho prevádzkou pri symetrickom napätí. Navyše pri napäťovej asymetrii nevzniká kruhové, ale elipsovité rotačné magnetické pole a tvar mechanickej charakteristiky motora sa trochu mení. Zároveň sa zníži jeho maximum a štartovacie momenty. Napäťová asymetria je charakterizovaná koeficientom asymetrie, ktorý sa rovná priemernej relatívnej (v percentách) odchýlke napätí v jednotlivých fázach od priemerného (symetrického) napätia. systém trojfázové napätia Za prakticky symetrický sa považuje, ak je tento koeficient menší ako 5 %.
Ak je jedna z fáz prerušená, motor pokračuje v prevádzke, ale nepoškodenými fázami budú pretekať zvýšené prúdy, čo spôsobí zvýšené zahrievanie vinutí; takýto režim by nemal byť povolený. Spustenie motora s otvorenou fázou nie je možné, pretože to nevytvára rotujúce magnetické pole, v dôsledku čoho sa rotor motora nebude otáčať.
Použitie asynchrónnych motorov na pohon pomocných strojov napr. p.s. poskytuje významné výhody oproti motorom priamy prúd. S poklesom napätia v kontaktnej sieti sa rýchlosť otáčania asynchrónnych motorov, a teda aj napájanie kompresorov, ventilátorov a čerpadiel, prakticky nemení. V jednosmerných motoroch je rýchlosť otáčania úmerná napájaciemu napätiu, takže napájanie týchto strojov je výrazne znížené.
V tomto článku upozorníme na tému mechanických a elektrických charakteristík elektromotorov. Na príklade indukčného motora zvážte také parametre, ako je výkon, práca, účinnosť, kosínus fí, krútiaci moment, uhlová rýchlosť, lineárna rýchlosť a frekvencia. Všetky tieto vlastnosti sú dôležité pri návrhu zariadení, v ktorých elektromotory slúžia ako pohony. Dnes sú to asynchrónne elektromotory, ktoré sú rozšírené najmä v priemysle, preto sa zastavíme pri ich charakteristikách. Zvážte napríklad AIR80V2U3.
Na typovom štítku (typovom štítku) elektromotora je vždy uvedený menovitý mechanický výkon na hriadeli tohto motora. Toto nie je ten pravý elektrická energia, ktoré tento elektromotor odoberá zo siete.
Takže napríklad pre motor AIR80V2U3 nominálna hodnota 2200 wattov presne zodpovedá mechanickému výkonu na hriadeli. To znamená, že v optimálnom prevádzkovom režime je tento motor schopný vykonávať mechanickú prácu 2200 joulov každú sekundu. Označme tento výkon ako P1 = 2200 W.

Na určenie menovitého činného elektrického výkonu asynchrónny motor, na základe údajov z typového štítku je potrebné zohľadniť účinnosť. Takže pre tento elektromotor je účinnosť 83%.

Čo to znamená? To znamená, že iba časť činného výkonu dodávaného zo siete do vinutí statora motora a nenávratne spotrebovaného motorom sa premení na mechanickú energiu na hriadeli. Činný výkon sa rovná P = P1/účinnosť. Pre náš príklad podľa prezentovaného štítku vidíme, že P1 = 2200, účinnosť = 83 %. Takže P \u003d 2200 / 0,83 \u003d 2650 W.
Celkový elektrický výkon dodávaný do statora motora zo siete je vždy väčší ako mechanický výkon na hriadeli a väčší ako činný výkon nenávratne spotrebovaný motorom.

Na zistenie celkového výkonu stačí vydeliť činný výkon kosínusovým phi. Celkový výkon je teda S = P/Cosφ. Pre náš príklad P = 2650 W, Cosφ = 0,87. Preto celkový výkon S = 2650 / 0,87 = 3046 VA.
Menovitý jalový elektrický výkon asynchrónneho elektromotora
Časť celkového výkonu dodávaného do vinutí statora indukčného motora sa vracia do siete. To .
Q = √( S2 – P2)
Jalový výkon súvisí so zdanlivým výkonom prostredníctvom sinφ a súvisí s aktívnym a zdanlivým výkonom Odmocnina. Pre náš príklad:
Q= √(3046 2 – 2650 2) = 1502 VAR
Jalový výkon Q sa meria v VAR - v jalových voltampéroch.
Teraz sa pozrime na mechanické charakteristiky nášho asynchrónneho motora: menovitý prevádzkový krútiaci moment na hriadeli, uhlová rýchlosť, lineárna rýchlosť, rýchlosť rotora a jej vzťah k výkonovej frekvencii elektromotora.
Na typovom štítku to vidíme pri napájaní striedavý prúd, rotor motora robí 2870 otáčok za minútu pri menovitom zaťažení, túto frekvenciu označujeme ako n1.

Čo to znamená? Keďže magnetické pole vo vinutiach statora vytvára striedavý prúd s frekvenciou 50 Hz, potom pre motor s jedným párom pólov (čo je AIR80V2U3) je frekvencia "rotácie" magnetické pole, synchrónna frekvencia n, je 3000 ot./min., čo je identické s 50 ot./min. Ale keďže je motor asynchrónny, rotor sa otáča dozadu o veľkosť sklzu s.
Hodnotu s možno určiť vydelením rozdielu medzi synchrónnymi a asynchrónnymi frekvenciami synchrónnou frekvenciou a vyjadrením tejto hodnoty v percentách:
s = ((n - n1)/n) *100 %
V našom príklade s = ((3000 - 2870)/3000) * 100 % = 4,3 %.

Uhlová rýchlosť ω je vyjadrená v radiánoch za sekundu. Na určenie uhlovej rýchlosti stačí previesť rýchlosť rotora n1 na otáčky za sekundu (f) a vynásobiť 2 Pi, pretože jedna celá otáčka je 2 Pi alebo 2 * 3,14159 radiánov. Pre motor AIR80V2U3 asynchrónna frekvencia n1 je 2870 ot./min, čo je 2870/60 = 47,833 ot./min.
Vynásobením 2 Pi dostaneme: 47,833 * 2 * 3,14159 \u003d 300,543 rad / s. Môžete to previesť na stupne, namiesto 2 Pi nahraďte 360 stupňov, potom pre náš príklad získate 360 * 47,833 = 17220 stupňov za sekundu. Takéto výpočty sa však zvyčajne vykonávajú v radiánoch za sekundu. Preto je uhlová rýchlosť ω \u003d 2 * Pi * f, kde f \u003d n1 / 60.
Lineárna rýchlosť v sa vzťahuje na zariadenie, na ktorom je ako pohon nainštalovaný asynchrónny motor. Ak je teda na hriadeli motora nainštalovaná kladka alebo povedzme šmirgľový kotúč so známym polomerom R, lineárnu rýchlosť bodu na okraji kladky alebo kotúča možno nájsť podľa vzorca:
v= ωR
Každý asynchrónny motor sa vyznačuje menovitým krútiacim momentom Mn. Krútiaci moment M súvisí s mechanickým výkonom P1 prostredníctvom uhlovej rýchlosti takto:
P= ω M
Krútiaci moment alebo moment sily pôsobiaci v určitej vzdialenosti od stredu otáčania je pre motor zachovaný a so zväčšujúcim sa polomerom sa sila zmenšuje a čím je polomer menší, tým je sila väčšia, pretože:
M = FR
Takže čím väčší je polomer remenice, tým menšia sila pôsobí na jej okraj a najväčšia sila pôsobí priamo na hriadeľ motora.

Pre motor AIR80V2U3 uvedený ako príklad je výkon P1 2200 W a frekvencia n1 je 2870 ot/min alebo f = 47,833 ot/min. Preto je uhlová rýchlosť 2*Pi*f, to znamená 300,543 rad/s, a nominálny krútiaci moment Mn je P1/(2*Pi*f). Mn \u003d 2200 / (2 * 3,14159 * 47,833) \u003d 7,32 N * m.
Na základe údajov uvedených na typovom štítku asynchrónneho elektromotora teda nájdete všetky jeho hlavné elektrické a mechanické parametre.
Dúfame, že vám tento článok pomohol pochopiť, ako súvisí uhlová rýchlosť, frekvencia, krútiaci moment, aktívny, čistý a zdanlivý výkon, ako aj účinnosť elektromotora.
Asynchrónny motor konvertuje elektrická energia do mechanického. Mechanická charakteristika asynchrónneho motora, elektromechanického a iných obsahuje informácie, bez ktorých nie je možná jeho správna činnosť.
Tento dizajn je široko používaný v rôznych odborochživotná činnosť človeka. Bez nich je práca obrábacích strojov, dopravníkov, zdvíhacích a dopravných strojov nemysliteľná. Motory s nízkym výkonom sú široko používané v automatizácii.
klasický asynchrónny stroj pozostáva z 2 hlavných častí: rotor (pohyblivý) a stator (pevný). Tri samostatné fázy tvoria vinutie statora. C1, C2 a C3 - označenie pre začiatok fáz. C3, C4 a C5 sú konce fáz. Všetky sú pripojené ku konektoru terminálu podľa schémy hviezdy alebo trojuholníka, ktorá je znázornená na obrázkoch a, b, c. Schéma sa vyberá s prihliadnutím na pasové údaje motora a sieťové napätie.
Stator vytvára vo vnútri motora magnetické pole, ktoré sa neustále otáča.
Rotor sa rozlišuje medzi klietkou nakrátko a fázou.
Vo veveričke nie je rýchlosť otáčania nastaviteľná. Dizajn s ním je jednoduchší a lacnejší. Jeho rozbehový moment je však príliš malý v porovnaní so strojmi, ktoré majú fázový rotor. Tu je rýchlosť otáčania riadená možnosťou zavedenia dodatočného odporu.
Privedením napätia na vinutie statora je možné pre každú fázu pozorovať meniace sa magnetické toky, ktoré sú voči sebe posunuté o 120 stupňov. Celkový výsledný tok sa ukáže ako rotujúci a vytvára EMF vo vnútri vodičov rotora.
Objaví sa tam prúd, ktorý v interakcii s výsledným tokom vytvára rozbehový moment. To spôsobí rotáciu rotora.
Existuje sklz S, t.j. rozdiel medzi frekvenciou otáčania samotného rotora n2 a frekvenciou magnetického poľa statora n1. Spočiatku sa rovná 1. Následne sa frekvencia zvyšuje, rozdiel n1 - n2 klesá. To vedie k zníženiu krútiaceho momentu.
Pri voľnobehu je sklz minimálny. Kritickú hodnotu Skr dosiahne pri zvýšení statického momentu. Prekročenie Skr vedie k neistá práca autá.
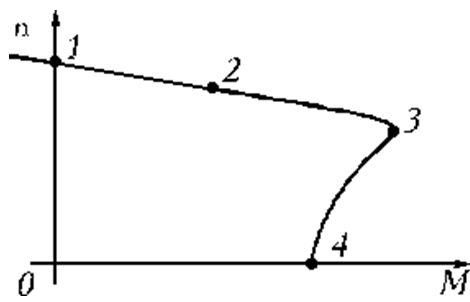
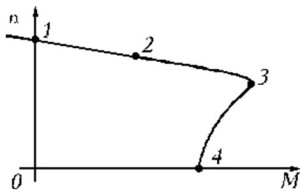
Ako hlavný pomáha vykonať podrobnú analýzu činnosti elektromotora. Vyjadruje priamu závislosť rýchlosti otáčania samotného rotora od elektromagnetického momentu n=f (M).
Z grafu je vidieť, že v sekcii 1-3 stroj pracuje stabilne. 3-4 - priamy segment nestabilnej práce. Ideálny voľnobeh zodpovedá bodu 1.
Bod 2 - nominálny režim prevádzky. Bod 3 - rýchlosť otáčania dosiahla kritickú hodnotu. Štartovací moment Mštart - bod 4.
Existovať technické spôsoby výpočty a konštrukcia mechanickej charakteristiky, berúc do úvahy údaje z pasu.
V počiatočnom bode 1 n0=60f/p (p je počet párov pólov). Pretože nн a Mн sú priamo súradnice bodu 2, výpočet menovitého krútiaceho momentu sa vykonáva podľa vzorca Mн=9,55*Рн/ nн, kde Рн je menovitý výkon. Hodnota n je uvedená v pase motora. V bode 3 Mcr=Mнλ. Počiatočný krútiaci moment v bode 4 Mstart = Mn * λstart (hodnoty λ, λstart - z pasu).
Takto vytvorená mechanická charakteristika sa nazýva prirodzená. Zmenou iných parametrov možno získať umelú mechanickú charakteristiku.
Získané výsledky umožňujú analyzovať a dohodnúť sa na mechanických vlastnostiach samotného motora a pracovného mechanizmu.
Je to závislosť uhlovej rýchlosti otáčania od prúdu statora. Pomocou niekoľkých referenčných bodov môžete vytvoriť elektromechanickú charakteristiku. Menovitý prúd sa vypočíta podľa vzorca:

Prúd naprázdno je 30-40% nominálnej hodnoty.
Výpočtový vzorec pre kritický sklz:
Prúd v počiatočnom momente spustenia:
Všetky hodnoty odrážajú elektromechanickú charakteristiku.
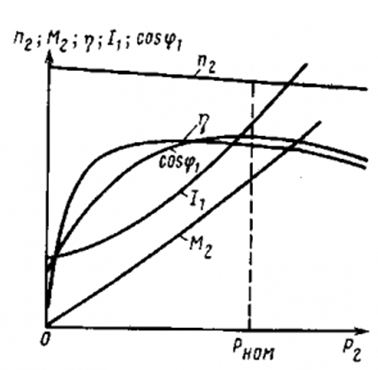 Výkon indukčného motora je vzťahom niekoľkých parametrov k čistému výkonu P2. Patria sem: otáčky samotného rotora n2, krútiaci moment na hriadeli M, sklz S, statorový prúd I1, príkon P, účinník COSφ a účinnosť.
Výkon indukčného motora je vzťahom niekoľkých parametrov k čistému výkonu P2. Patria sem: otáčky samotného rotora n2, krútiaci moment na hriadeli M, sklz S, statorový prúd I1, príkon P, účinník COSφ a účinnosť.
Okrem toho sa frekvencia elektrického prúdu a napätia na rozdiel od záťaže nemení.
Výkonové charakteristiky indukčného motora sú spravidla postavené v rozsahu hodnôt sklzu od 0 do hodnoty presahujúcej nominálnu hodnotu o 10%. Toto je oblasť, kde stroj pracuje stabilne.
Rýchlosť rotora n2 klesá so zvyšujúcim sa zaťažením hriadeľa. Tieto zmeny však nepresahujú 5 %. Prúd I1 sa zvyšuje, pretože s následným zvýšením zaťaženia jeho aktívna zložka prevyšuje jalovú.
СOSφ pri voľnobehu je malý. Ale potom sa to zvyšuje. Pri zvýšenom zaťažení СOSφ klesá v dôsledku zvyšujúcej sa reaktancie vo vinutí rotora.
Účinnosť voľnobehu je 0. S nárastom zaťaženia sa pozoruje jeho prudký nárast a následne pokles.
Svetlana Furshtakova Synopsa hry na hranie rolí v strednej skupine "Kaviareň" 1. Úlohy: 1. Pokračovať v oboznamovaní detí s ...

Sexsymbol ruskej scény, bývalý člen skupiny VIA Gra a jednoducho krásna Vera Brežneva odhaľuje tajomstvá ...
Ciele hodiny: Vzdelávacie: formovať poznatky o novej téme v súlade s programovým materiálom; preskúmať...

Špeciálnymi vizuálnymi rozdielmi sú odtlačky vŕbových prútov po stranách hlavy, je to spôsobené zberom hotovej srvátky v...

Rastlina zlaté fúzy, známa aj ako kalisia voňavá, našla široké uplatnenie v ľudovom liečiteľstve. Verí sa, že...

Ako propagovať svoju firmu: pomocou internetu + propagácia pomocou videa + tvorba vizitiek a letákov + 5...

Pre správnu výsadbu, starostlivosť a umiestnenie weigely v záhrade nezabudnite, že weigela: dobre zakoreňuje na ...

Plnené palacinky s mletým mäsom sú výdatným jedlom pre celú rodinu. Tenký, beztiažový základ v spojení so šťavnatým...

V kuracích krídelkách nie je veľa mäsa. Napriek tomu ich mnohí gurmáni milujú. Ak sú krídla správne...

Pšeničná kaša je lacný a veľmi zdravý produkt. Aby to bolo chutné, potrebujete vedieť niekoľko ...

Ahoj! Dnes chcem hovoriť o tom, ako pripraviť paradajkový dresing na zimu na cestoviny....

Predstavte si veľký kus ošľahaného a obaľovaného mäsa, šťavnatého zvnútra a chrumkavého zvonku,...

Ponúkame nahradiť obvyklé klobásové sendviče tým najroztomilejším a najzaujímavejším občerstvením. Ruže z...

Výborným chudým (a tiež diétnym) snackom je pasta z chudých fazúľ. Obsahuje veľa bielkovín a...

Spravidla sú tieto orgány životne dôležité. Existuje zoznam srdcových chorôb v prítomnosti ...

Dospelý bičíkovec v ľudskom hrubom čreve objavený počas kolonoskopickej epidemiológie po celom svete...