 , rpm
, rpmTrojfázový asynchrónny motor so skráteným rotorom
Výskum asynchrónneho motora s fázovým rotorom Účel práce: oboznámiť sa s návrhom asynchrónneho motora s ...
Výskum asynchrónneho motora s fázovým rotorom
Cieľ: oboznámiť sa s konštrukciou asynchrónneho motora s fázovým rotorom. Skontrolujte štart, riadenie rýchlosti zmenou sklzu, cúvaním. Odstráňte nábehový diagram, prevádzkové, mechanické a nastavovacie charakteristiky motora.
Všeobecné informácie
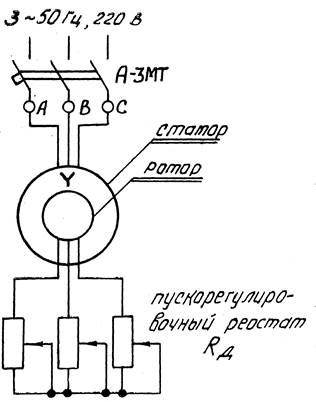
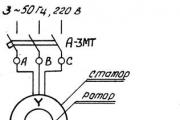
Asynchrónny motor s fázovým rotorom (motor s klznými krúžkami), ktorého schéma zapojenia je znázornená na obrázku 1, pozostáva z dvoch častí: z pevnej časti - statora a rotujúcej časti - rotora.
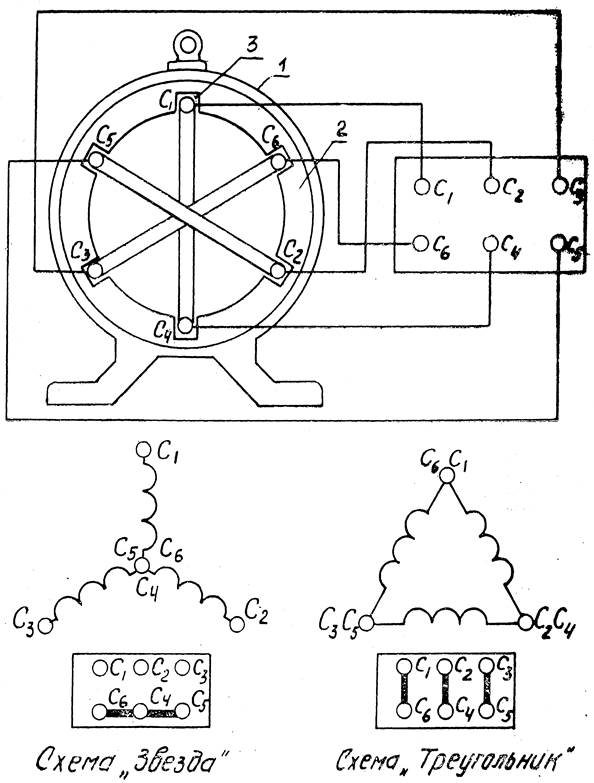
Stator (obr. 2) je rám (telo) (1) vyrobený zo železného odliatku vo forme valcového odliatku s pätkami na upevnenie na základoch. Do rámu sa vtlačí vrecko (2), ktoré je dutým valcom zo samostatného, potiahnutého špeciálnym izolačným lakom, tenkými plechmi z elektrickej ocele s drážkami vyrazenými pozdĺž vnútorného povrchu (3).
V drážkach sú usporiadané trojfázové vinutie statora, pozostávajúce z troch identických fázových vinutí, ktoré sa otáčajú voči sebe pozdĺž obvodu zväzku statorov pri 120 elektrických stupňoch. Začiatok navíjania a konce sú zobrazené na paneli stroja.
Prítomnosť šiestich záverov umožňuje pripojenie vinutí statora buď podľa schémy „hviezda“ alebo „trojuholník“. K terminálom je pripojený trojfázový napájací zdroj. Na koncoch lôžka sú upevnené ložiskové štíty, v ktorých sú umiestnené guľkové ložiská hriadeľa rotora.
Rotor (obr. 3) je valec pritlačený na hriadeľ (zväzok rotorov) (1), zostavený z oddelených tenkých plechov potiahnutých elektrickou oceľou potiahnutých špeciálnym izolačným lakom s drážkami vyrazenými pozdĺž vonkajšieho povrchu (2). V drážkach sa nachádza trojfázové vinutie rotora ![]() vyrobené ako statorové vinutie a spojené podľa schémy "hviezda".
vyrobené ako statorové vinutie a spojené podľa schémy "hviezda".
Začiatok fáz vinutia, vybratý vo vnútri dutého hriadeľa a pripevnený k kontaktným krúžkom (3). Na krúžkoch sú navrstvené medeno-grafitové kefy (4) spojené so svorkami na tienidle rotora.
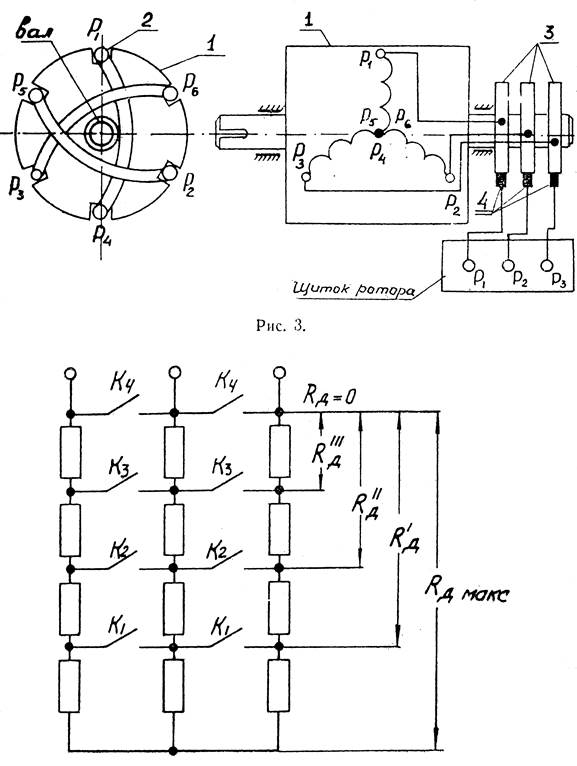
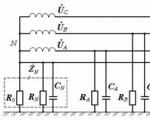
Terminály ,, slúžia na pripojenie rotorového vinutia trojfázových štart-odporov (obr. 4), ktoré sa skladajú z troch, rozdelených do sekcií, s rovnakým aktívnym odporom, zapojených podľa schémy „hviezda“. Hodnota môže byť znížená o stupne (,,, = 0), uzatvorením kontaktov ,,, postupným pohybom rukoväte (ručného kolieska) reostatu z polohy do polohy 3, 2, 1, = 0.
Princíp činnosti asynchrónneho motora s fázovým rotorom
Prúd tečúci vinutiami statora pôsobením trojfázového napätia privádzaného na svorky vytvára vo vnútri statora rotujúci magnetický tok. Frekvencia otáčania tohto prúdu vzhľadom na stator je určená vzorcom:
kde - frekvencia trojfázovej napájacej siete, Hz,
p je počet párov pólov vinutia statora,
- frekvencia otáčania magnetického toku, ot / min.
Smer otáčania prietoku je určený poradím otáčania fáz statora. Zmena sledu fáz mení magnetický tok. Na zmenu sledu fáz stačí vymeniť dva z troch vodičov spájajúcich stator so sieťou. Veľkosť rotujúceho magnetického toku, ktorý je súčtom troch sínusových magnetických tokov vinutí statorovej fázy, sa nemení v čase a je určená vzorcom:
kde ─ je amplitúda sínusového premenlivého magnetického toku vinutia statorovej fázy.
Hodnota je priamo úmerná napätiu aplikovanému na svorky statora pri U = const tiež konštantné. Počas otáčania magnetický tok so svojimi silovými vedeniami prechádza vodičmi vinutia rotora a v nich indukuje trojfázový EMF. Pretože rotorové vinutie je uzavreté (na jednej strane point spoločný bod rotorových fázových vinutí spojených s hviezdou, na druhej strane - spoločný bod odporov spojených s hviezdou), ním prúdi trojfázový rotorový prúd, ktorý vytvára rotujúci rotorový prúd.
Prúdi a rotuje synchrónne a tvorí celkový rotačný tok motora F. Celkový magnetický tok spojený s vinutím statora a vinutím rotora v nich vyvoláva elektromotorické sily. Toto je analógia asynchrónneho motora s transformátorom.
V dôsledku interakcie prúdov rotora s prúdom F vytvárajú mechanické sily pôsobiace na vodiče vinutia rotora rotujúci elektromagnetický moment M. Ak je krútiaci moment M väčší ako statický brzdný moment na hriadeli, rotor motora sa bude otáčať v smere otáčania poľa s frekvenciou otáčania.< . Относительную разность частот вращения поля и ротора называют скольжением.
Rýchlosť rotora vyjadrená sklzom bude
.
Pri spúšťaní motora = 0 a s = 1. Ak sa rotor otáča synchrónne so statorovým poľom (=), potom sklz by bol nula (s = 0). Keď je magnetické pole statora stacionárne voči rotoru a prúdy v rotore nebudú indukované, potom M = 0. Následne motor nemôže dosiahnuť túto rýchlosť, teda názov ─ asynchrónny (nie súbežný).
Energetický graf
Transformáciu energie v asynchrónnom motore, ako aj v iných elektrických strojoch, sprevádzajú straty. Tieto straty, ktoré možno rozdeliť do troch typov: elektrické, magnetické a mechanické, a celý proces premeny energie je jasne znázornený v energetickom diagrame (obr. 5).
Napájanie motora zo siete:
⋅ ⋅ cos, W,
kde je napätie aplikované na fázu vinutia statora, V;
- prúd vo fáze vinutia statora, A;
cos je účinník motora.

Elektrická energia dodávaná do statora sa čiastočne stráca v statore v dôsledku strát v dôsledku vírivých prúdov a hysterézie v oceli () a strát v vodičoch vinutia ()
kde je aktívny odpor fázy navíjania statora;
- počet fáz vinutia statora (pre trojfázový motor = 3).
Zostávajúca energia cez magnetický tok sa prenáša do rotora, a preto sa nazýva elektromagnetický výkon ()
- (+) W.
Časť elektromagnetického výkonu sa spotrebuje na pokrytie elektrických strát vinutia rotora, je úmerná preklzávaniu
Zvyšok elektromagnetickej energie sa premieňa na mechanický výkon motora, nazývaný celková mechanická sila.
Mechanický výkon na hriadeli motora, W, je menší ako celkový mechanický výkon o množstvo mechanických a dodatočných strát.
Účinnosť motora
Výkon motora
Ako každý iný elektromotor sa asynchrónny motor s fázovým rotorom vyhodnocuje na základe sady štartovacích, prevádzkových a nastavovacích charakteristík. Spúšťanie motora a jeho zrýchlenie na minimálnu rýchlosť otáčania je možné sledovať zmenou mechanických charakteristík a spínacích prúdov v závislosti od množstva pridaného aktívneho odporu zavedeného do obvodu rotora.
Mechanická charakteristika je závislosť rýchlosti otáčania na krútiacom momente hriadeľa s konštantným aktívnym odporom v obvode rotora, t.j.
= f (M) at = const.
Skupina mechanických charakteristík asynchrónneho motora s fázovým rotorom je znázornená na obr. 6.
| |
| |
| |
Typ mechanickej charakteristiky určuje správanie sa pohonu.
v prechodných režimoch rozbiehania, brzdenia, zmeny otáčok, ktoré významne ovplyvňujú výkon mechanizmu, ako aj jeho spoľahlivosť v prevádzkových podmienkach. Mechanické vlastnosti motora s aktívnym odporom zavedeným do rotorového obvodu sa nazývajú umelé; každá hodnota zodpovedá vlastnej umelej mechanickej charakteristike. Mechanická charakteristika v neprítomnosti dodatočného odporu v obvode rotora (= 0) sa nazýva prirodzená. Prirodzené a umelé mechanické vlastnosti sa pretínajú v spoločnom bode osi osi - frekvencia otáčania rotujúceho magnetického poľa statora. Prevádzka motora s prirodzenými mechanickými vlastnosťami najekonomickejšieho. Prirodzená mechanická charakteristika je najpevnejšia, t. keď sa bremeno zmení, otáčky motora sa mierne zmenia. Pri práci na prirodzenej mechanickej charakteristike má motor malý štartovací moment = (0,7 ÷ 1,8) a veľký štartovací prúd
= (5,5 ÷ 7,0)
Odpor zavedený do rotorového obvodu znižuje prúd v čase uvedenia do prevádzky a súčasne zvyšuje štartovací moment, t.j. zlepšuje štartovacie vlastnosti motora. Začiatok indukčného motora s fázovým rotorom sa preto vykonáva na umelých mechanických vlastnostiach (úseky ab, cd, ef, gh štartovacieho diagramu).
Prechod z jednej umelej charakteristiky na druhú nastáva po odstránení ďalšej časti rezistencie.
Bod "k" diagramu zodpovedá štartu motora pri prirodzenej mechanickej charakteristike.
Odpor zavedený do každej fázy rotorového vinutia pred začatím sa volí tak, aby počiatočný moment bol rovný kritickému momentu, t.j. =.
Ako viete, maximálny moment nastane počas kritického sklzu, ktorý je určený vzorcom:
kde je aktívny odpor fázy rotorového vinutia, Ohm;
- indukčný odpor fázy vinutia stacionárneho rotora, Ohm.
Aby sa dosiahol maximálny štartovací moment, musí byť splnená podmienka
![]() = 1
= 1
Počet krokov odporu sa volí v súlade s požiadavkami hladkého štartu.
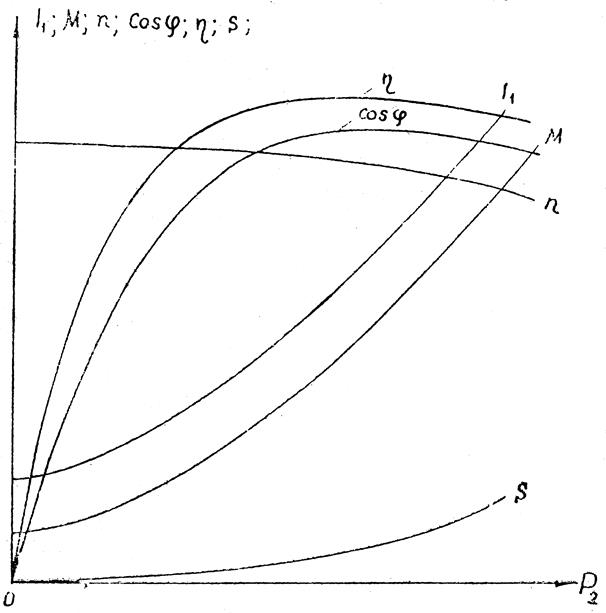
Výkon asynchrónneho motora s fázovým rotorom je závislosť rýchlosti otáčania n, krútiaceho momentu M, spotrebovaného prúdu, účinníka сos, účinnosti η na výkone hriadeľa pri = konšt. f 1 = const, t.j.
M, сos, η = f (
Výkon sa posudzuje na základe základných vlastností motora. Najmä môžu byť postavené mechanické vlastnosti
n = f (M). Výkon nízkonapäťových motorov možno odstrániť priamym zaťažením pomocou elektromagnetickej brzdy. Pre motory so stredným a vysokým výkonom je výkon určený koláčovým grafom. Príklad výkonových charakteristík asynchrónneho motora je znázornený na obr. 7.
Riadiaca charakteristika asynchrónneho motora s fázovým rotorom = f () predstavuje závislosť otáčok motora pri konštantnom krútiacom momente na hriadeli na veľkosti aktívneho odporu. Zavedením odporu do obvodu rotora motora je možné nastaviť otáčky smerom nadol od menovitého. Rozsah regulácie bude širší, čím je motor silnejšie zaťažený. Regulácia rýchlosti sa vykonáva prevodom motora z prirodzených charakteristík na mäkšie umelé vlastnosti. Tento spôsob regulácie rýchlosti nie je ekonomický, pretože vysoké energetické straty v odporu. Na obr. 6 ukazuje rozsah možnej regulácie otáčok pri menovitom zaťažení.
Elektromagnetická brzda
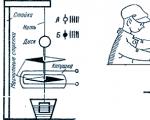
Zaťaženie skúmaného asynchrónneho motora sa vykonáva pomocou elektromagnetickej brzdy (obr. 8), pozostávajúcej z magnetického systému a oceľového kotúča. Magnetický systém sa skladá z magnetického jadra a vinutia OBT (vinutie budenia brzdy). Kotúč je na rovnakom hriadeli s elektromotorom a je poháňaný naposledy v rotácii.
Princíp brzdy je založený na vytvorení brzdného momentu z interakcie vírivých prúdov oceľového kotúča s magnetickým tokom vinutia OVT, excitovaného jednosmerným prúdom.
Magnetický systém sa môže otáčať vzhľadom na hriadeľ kotúča a jeho uhol otáčania závisí od momentu zaťaženia motora. Brzdová stupnica, kalibrovaná v jednotkách krútiaceho momentu, umožňuje motoru načítať zaťaženie v Nm.
Poradie práce
POZOR!
Pri vykonávaní práce dodržiavajte bezpečnostné pokyny uvedené v pokynoch na pracovisku!
NEZAHRŇUJTE SCHÉMA, KTORÁ NIE JE SKÚŠANÁ VEDOMOM TRIEDY !!!
1. Oboznámiť sa so zariadením a zariadeniami zariadenia na štúdium motora.
a) Štít svorky indukčného motora s fázovým rotorom typu MKA-13 sa oboznámiť s umiestnením svoriek vinutia statora: ![]() a svorky na navíjanie rotora.
a svorky na navíjanie rotora.
b) elektromagnetická brzda "ET" umiestnená na tom istom hriadeli s motorom a brzdný odpor.
c) trojfázový predradník;
g) meracie prístroje: ampérmeter, voltmeter, wattmeter;
e) snímač a indikátor elektrického tachometra;
e) svorky A, B, C na laboratórnom paneli a stroji A4;
g) svorky (+), (-) 110 V na laboratórnom paneli a automatický stroj A2.
2. Oboznámte sa s technickými charakteristikami motora na cestovnom pase.
V správe uveďte základné údaje (typ, výkon, napätie, prúd, frekvencia, rýchlosť rotora, účinnosť, účinník, E.D.S. a prúd rotora).
3. Spoznajte elektrický tachometer.
Indikátor elektrického tachometra má dve šípky: menšia ruka ukazuje tisíce otáčok za minútu, veľká ruka ukazuje stovky otáčok.
4. Zmontujte schému pre štúdium motora (Obr. 8).
5. Zaznamenajte hlavné technické údaje meracích prístrojov do tabuľky 1.
Tabuľka 1
6. Pripravte motor na štart:
6.1. Rukoväť brzdových odporov umiestnite do polohy „vypnuté“.
6.2. Reostat motora je v polohe.
7. Dajte systému skontrolovať vodcu triedy.
8. Po skontrolovaní obvodu nadriadeným a po povolení POVOLENIA zapnite automat A2 a nastavte odpor na prúd = 0,7 A.
9. Odstráňte údaje na vytvorenie štartovacej tabuľky.
9.1. Zapnite stroj A4.
9.2. Zmerajte nábeh lineárneho prúdu, keď sa rukoväť presunie z polohy „vypnuté“ do polohy, t.j. pri = 0.
9.3. Po čakaní na ustálenú prevádzku motora v tomto štádiu (ihla tachometra sa prestane pohybovať) zmerajte maximálnu hodnotu otáčok a zodpovedajúcu minimálnu hodnotu lineárneho prúdu. Výsledok sa zaznamená do prvého riadku tabuľky 2 (1. etapa).
9.4. Vykonajte podobné merania pre zostávajúce štartovacie stupne (keď sa rukoväť reostatu presunie z polohy “” do polohy 3, z 3 do polohy 2 atď.). Namerané údaje zaznamenané v tabuľke 2.
Minimálna hodnota frekvencie rotácie tejto fázy sa rovná jej maximálnej hodnote v predchádzajúcom štádiu, t. prechod motora z jednej charakteristiky na druhú nastáva, keď n = const.
10. Postupne vypnite motor.
Ministerstvo školstva a vedy Ruskej federácie
Federálna vzdelávacia agentúra
Štátna vzdelávacia inštitúcia
Vyššie odborné vzdelávanie
Národný výskum
ŠTÁTNA TECHNICKÁ UNIVERZITA IRKUTSK
Katedra elektrotechniky a elektrotechniky
Správa o laboratórnej práci №11
o disciplíne "Všeobecná elektrotechnika a elektronika"
vyhovel
Študent SMO-11-1 ________ Kopytko I.V. 20.10.2012
Docent E & ET ________ Kiryukhin Yu.A. __________
(Podpísané) Priezvisko a. (Date)
Irkutsk 2012
Cieľ práce 3
1 Stručné teoretické informácie 3
Elektrické inštalačné zariadenia 7
2 Pracovný postup 7
3 Výpočtová časť 9
4 Pozemky 10
Testovacie otázky 14
Odkazy 17
Účel práce
Oboznámte sa so zariadením a princípom činnosti trojfázového asynchrónneho motora s rotorom vačkovej klietky a skúste vplyv napätia na statorovú sondu na jeho vlastnosti.
1 Stručné teoretické informácie
1) Zariadenie, princíp asynchrónneho motora.
Asynchrónny motor je AC stroj. Slovo „asynchrónny“ neznamená simultánne. V tomto prípade sa rozumie, že v asynchrónnych motoroch sa frekvencia otáčania magnetického poľa líši od frekvencie otáčania rotora. Hlavnými časťami stroja sú stator a rotor, ktoré sú od seba oddelené jednotnou vzduchovou medzerou.
Stator je pevnou súčasťou stroja. Na zníženie strát spôsobených vírivými prúdmi je jeho jadro vyrobené z lisovaných plechov z elektrickej ocele s hrúbkou 0,35-0,5 mm, ktoré sú od seba oddelené vrstvou laku. Vinutie sa ukladá do štrbín magnetického obvodu statora. V trojfázových motoroch je vinutie trojfázové. Fázy vinutia môžu byť zapojené do hviezdy alebo trojuholníka v závislosti od veľkosti sieťového napätia.
Rotor je rotujúca časť motora. Magnetické jadro rotora je valec vyrobený z lisovaných plechov z elektrickej ocele. V štrbinách vinutia zväzku rotorov. V závislosti od typu vinutia sú rotory asynchrónnych motorov rozdelené na skratové a fázové (s klznými krúžkami). Skrátené vinutie je neizolovaná medená alebo hliníková tyč pripojená ku koncom prstencov z toho istého materiálu („klietka veverica“).
Na fázovom rotore v drážkach magnetického obvodu sa nachádza trojfázové vinutie, ktorého fázy sú spojené hviezdou. Voľné konce fáz vinutia sú spojené s tromi medenými klznými krúžkami namontovanými na hriadeli motora. Klzné krúžky sú izolované od seba a od hriadeľa. K krúžkom sa pritlačia uhlíkové alebo medeno-grafitové kefy. Pomocou klzných krúžkov a kefiek v vinutí rotora môžete zapnúť trojfázový štart a reostat.
Premena elektrickej energie na mechanickú energiu v asynchrónnom motore sa uskutočňuje pomocou rotujúceho magnetického poľa. Nevyhnutnými podmienkami pre excitáciu rotujúceho magnetického poľa sú:
priestorový posun osí statorových cievok;
časový posun prúdov v cievkach statora.
Prvá požiadavka je splnená vhodným umiestnením magnetizačných cievok na magnetickom jadre statora. Fázová os vinutia je v priestore odsadená o uhol 120 °. Druhá podmienka je zaistená aplikovaním trojfázového napäťového systému na cievku statora.
Keď sa motor zapne v trojfázovej sieti, v vinutí statora sa vytvorí systém prúdov s rovnakou frekvenciou a amplitúdou, ktorých periodické zmeny vo vzťahu k sebe sa uskutočňujú s oneskorením 1/3 periódy.
Prúdy fáz vinutia vytvárajú magnetické pole, ktoré sa otáča vzhľadom na stator s frekvenciou, otáčkami, ktorá sa nazýva frekvencia otáčania synchrónneho motora:
kde  - frekvencia sieťového prúdu, Hz,
- frekvencia sieťového prúdu, Hz,
p je počet párov pólov magnetického poľa.
So štandardnou sieťovou frekvenciou  frekvencia otáčania poľa
frekvencia otáčania poľa

|
|
Otáčanie, pole prechádza vodičmi rotora a indukuje v nich emf. Keď je vinutie rotora zatvorené, EMF spôsobuje prúd, pri interakcii s rotujúcim magnetickým poľom dochádza k rotujúcemu elektromagnetickému momentu. Rýchlosť otáčania rotora v režime motora asynchrónneho stroja je vždy nižšia ako rýchlosť otáčania poľa, t.j. rotor zaostáva za rotujúcim poľom. Iba v tomto stave je EMF indukované v rotorových vodičoch, prúdové toky a krútiaci moment. Fenomén oneskorenia rotora od magnetického poľa sa nazýva sklz. Stupeň oneskorenia rotora od magnetického poľa je charakterizovaný veľkosťou relatívneho sklzu:
kde n je rýchlosť rotora, otáčky za minútu
Pre asynchrónne motory sa môže sklz meniť od 1 (štart) do hodnoty blízkej 0 (voľnobeh).
2 ) Spustenie asynchrónnych motorov.
Pri naštartovaní motora musia byť splnené nasledujúce požiadavky:
1. Malý štartovací prúd;
2. primeraný štartovací moment;
3. Plynulé zvýšenie rýchlosti;
4. Jednoduchý a ekonomický štart.
V závislosti od konštrukcie rotora (skrat alebo fáza), výkonu motora, povahy zaťaženia sú možné rôzne spôsoby štartovania.
Pre motory s krátkym rotorom sa používa priamy štart a štart so zníženým napätím.
1. Priamy štart. V tomto prípade je vinutie statora pripojené priamo k sieti pri plnom napätí. Priamy štart je povolený len pre asynchrónne motory s krátkym rotorom s nízkym a stredným výkonom (do 15-20 kW). Pri významnom napájaní sa však táto metóda môže rozšíriť na motory s vyšším výkonom (až do 50 kW).
2.
Spustenie nízkeho napätia
.
Štartovací prúd motora je úmerný napätiu na fázach vinutia statora  znižuje napätie sprevádzaný zodpovedajúcim poklesom štartovacieho prúdu. Tento spôsob však vedie k poklesu počiatočného štartovacieho momentu, ktorý je úmerný štvorcu napätia na fázach vinutia statora. Vzhľadom na výrazné zníženie štartovacieho momentu je táto metóda štartovania použiteľná len pre nízke zaťaženia hriadeľa.
znižuje napätie sprevádzaný zodpovedajúcim poklesom štartovacieho prúdu. Tento spôsob však vedie k poklesu počiatočného štartovacieho momentu, ktorý je úmerný štvorcu napätia na fázach vinutia statora. Vzhľadom na výrazné zníženie štartovacieho momentu je táto metóda štartovania použiteľná len pre nízke zaťaženia hriadeľa.
Existuje niekoľko spôsobov, ako znížiť napätie. v čase spustenia:
a) s jednoduchým spustením asynchrónnych motorov s priemerným výkonom, ktoré normálne pracujú pri pripájaní fáz statorového vinutia s trojuholníkom, aplikujte redukciu napätia na svorkách týchto fáz ich prepnutím na hviezdicu;
b) pri akomkoľvek type spojenia fáz statorového vinutia sa môže napätie znížiť pomocou reaktora (trojfázová indukčná cievka) zapojeného do série v vinutí statora. Je menej úsporné znižovať napätie na statore postupným zapínaním odporov, pretože zároveň sú veľmi horúce a dochádza k ďalším stratám elektrickej energie;
c) pre motory s vysokým výkonom sa odporúča znížiť napätie pomocou trojfázového autotransformátora. Táto metóda je lepšia ako tá predchádzajúca, ale oveľa drahšia. Po zrýchlení rotora motora a poklese prúdu sa na vinutie statora privedie plné napätie siete.
Motor s fázovým rotorom sa zapne zapnutím štartovacieho odporu v obvode rotora. Štartovací reostat znižuje hodnotu počiatočného štartovacieho prúdu a zároveň zvyšuje počiatočný štartovací moment, ktorý môže dosiahnuť hodnoty blízke maximálnemu krútiacemu momentu. Pri zrýchľovaní motora sa spúšťa štartovací reostat.
3) Regulácia otáčok a reverzácia indukčného motora.
Regulácia je nútená zmena rýchlosti pri konštantnom zaťažení hriadeľa. Nevýhodou asynchrónnych motorov je nízka schopnosť nastavenia. Niektoré možnosti regulácie sú však stále k dispozícii.
Zo vzorca preklzania môžete vyjadriť rýchlosť rotora indukčného motora:
Z tejto rovnosti vyplýva, že rýchlosť otáčania sa môže meniť nasledujúcimi spôsobmi: zmenou frekvencie prúdu statora , počet párov pólov p a sklzu s. Rýchlosť rotora možno nastaviť zmenou napájacieho napätia , Zvážte tieto spôsoby.
Regulácia zmenou frekvencie statorového prúdu
.
Frekvenčné riadenie asynchrónnych motorov je najsľubnejšie vďaka prítomnosti jednoduchých a spoľahlivých trojfázových tyristorových frekvenčných meničov, ktoré zahŕňajú medzi priemyselnou sieťou a asynchrónnym motorom. Pri nastavovaní frekvencie otáčky motora sa dajú plynulo meniť tak, aby jeho maximálna hodnota bola desiatky alebo stovky krát vyššia ako minimum.
Nariadenia zmenou počtu párov pólov p . Prepínanie počtu párov viacrýchlostných asynchrónnych motorov poskytuje krokovú reguláciu otáčok rotora a je ekonomická. Používa sa v strojoch so špeciálnym vyhotovením vinutia statora, ktoré umožňuje prepínanie jeho cievok na iný počet párov pólov, a tiež keď je v štrbinách magnetického obvodu statora umiestnených niekoľko striedavo vinutých vinutí, vytvorených pre iný počet párov pólov, napríklad p = 1 a p = 2. ,
Regulácia napájacieho napätia
.
Zníženie napätia spôsobuje zníženie rýchlosti rotora. Znížiť stres môžu byť pripojené na reostaty statorového obvodu, autotransformátory alebo nastaviteľné tlmivky. Táto metóda sa používa len pre motory s nízkym výkonom, pretože zníženie napätia znižuje maximálny krútiaci moment motora, ktorý je úmerný štvorcu napätia. Zníženie maximálneho krútiaceho momentu znižuje stabilitu motora. Okrem toho je rozsah regulácie frekvencie relatívne malý.
Vyššie uvedené spôsoby regulácie sú aplikované na indukčné motory s klietkou.
Pri motoroch s fázovým rotorom sa rýchlosť otáčania reguluje zmenou sklzu. Na tento účel je do vinutia rotora zahrnutý reostat. S nárastom odporu nastavovacieho reostatu sa zvyšuje sklz a znižuje sa rýchlosť otáčania.
Táto metóda umožňuje plynulú zmenu rýchlosti.
Zmena smeru otáčania rotora sa nazýva reverzácia. Pri spätnom chode musíte vymeniť dva vodiče na svorkách vinutia statora motora.
Východiskové vlastnosti asynchrónneho motora závisia od vlastností jeho konštrukcie, najmä od rotorového zariadenia.
Spustenie asynchrónneho motora je sprevádzané prechodným procesom stroja, ktorý je spojený s prechodom rotora z pokojového stavu do stavu rovnomerného otáčania, v ktorom krútiaci moment motora vyrovnáva moment odporových síl na hriadeli stroja.
Pri spúšťaní asynchrónneho motora dochádza k zvýšenej spotrebe elektrickej energie zo sieťového napájania, ktorá sa vynakladá nielen na prekonanie brzdného momentu pôsobiaceho na hriadeľ a na pokrytie strát v samotnom indukčnom motore, ale aj na komunikáciu určitej kinetickej energie s pohyblivými článkami výrobnej jednotky. Preto pri spúšťaní indukčného motora sa musí vyvinúť zvýšený krútiaci moment.
pre asynchrónny motor s fázovým rotorom počiatočný počiatočný krútiaci moment zodpovedajúci sklzu sp = 1 závisí od aktívnych odporov nastaviteľných odporov zavedených do rotorového obvodu.
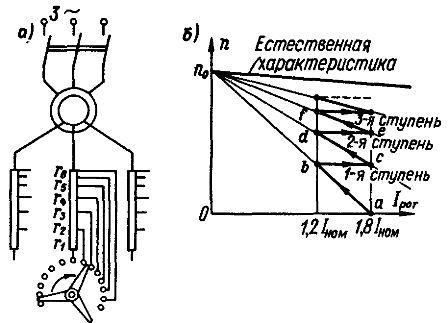
Obr. 1. Uvedenie do prevádzky trojfázového asynchrónneho motora s fázovým rotorom: a - grafy krútiaceho momentu motora s fázovým rotorom na sklze pri rôznych aktívnych odporoch odporov v obvode rotora, b - schéma zapojenia odporov a uzatváracích kontaktov zrýchlenia v obvode rotora.
Takže s uzavretými kontaktmi zrýchlenia U1, U2, t.j. pri spustení asynchrónneho motora s uzavretými klznými krúžkami, počiatočný štartovací moment Mp1 = (0,5 - 1,0) Mna počiatočný štartovací prúd jan = (4,5- 7) jamr.a viac.
Malý počiatočný štartovací moment asynchrónneho motora s fázovým rotorom môže byť nedostatočný na aktiváciu výrobnej jednotky a jej následné zrýchlenie a významný štartovací prúd spôsobí zvýšené zahrievanie vinutí motora, čo obmedzuje frekvenciu jeho štartov, a v nízkoenergetických sieťach vedie k nežiaducemu chodu iných prijímačov. dočasný pokles napätia. Tieto okolnosti môžu byť príčinou, okrem použitia asynchrónnych motorov s fázovým rotorom s veľkým štartovacím prúdom na riadenie pracovných mechanizmov.

Zavedenie nastaviteľných rezistorov, nazývaných štartovacie, do okruhu rotorového motora nielenže znižuje počiatočný štartovací prúd, ale súčasne zvyšuje počiatočný štartovací moment, ktorý môže dosiahnuť maximálny krútiaci moment Mmax (obr. 1, a, krivka 3), ak kritický sklz motora s fázovým rotorom
scr =(R2" + Rd ") / (X1 + X2") = 1,
kdeRd " - aktívny odpor odporu vo fáze vinutia rotorového motora, redukovaný na fázu vinutia statora. Ďalšie zvýšenie aktívneho odporu štartovacieho odporu je nevýhodné, pretože vedie k oslabeniu počiatočného štartovacieho momentu a bodu maximálneho momentu v klznej oblasti s\u003e 1, čo eliminuje možnosť zrýchlenia rotora.
Požadovaný odpor odporov na štartovanie motora s fázovým rotorom je určený na základe požiadaviek štartu, ktorý môže byť ľahký, MP = (0,1 - 0,4)Mmr.normálne, ak Mn - (0,5 - 0,75) Ma ťažké s Mn ≥ Me.
Na udržanie dostatočne veľkého krútiaceho momentu s motorom s fázovým rotorom počas zrýchlenia výrobnej jednotky, aby sa skrátila doba trvania prechodového procesu a znížilo sa zahrievanie motora, je potrebné postupne znižovať odpor štartovacích odporov. Prípustná odchýlka momentu v procese zrýchlenia M (t) je daná elektrickými a mechanickými podmienkami, obmedzujúcimi limit maximálneho momentu M\u003e 0,85 Mmax, spínací moment M2 \u003e\u003e MS (obr. 2), ako aj zrýchlenie.
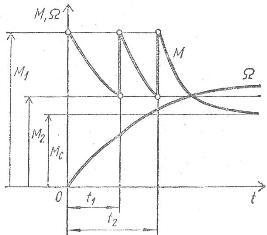
Obr. 2. Štartovacie charakteristiky trojfázového asynchrónneho motora s fázovým rotorom

Zapínanie štartovacích odporov je zabezpečené striedavým zapínaním urýchľovacích stykačov Y1, Y2, resp. V časoch t1, t2 počítaných od momentu naštartovania motora, keď sa počas zrýchlenia krútiaci moment M rovná momentu spínania M2. V dôsledku toho sú počas celého štartu všetky špičkové momenty rovnaké a všetky spínacie body sú si navzájom rovnaké.
Pretože krútiaci moment a prúd asynchrónneho motora s fázovým rotorom sú vzájomne spojené, je možné nastaviť špičkový limit prúdu I1 = (1,5 - 2,5) In a spínací prúd I2, ktorý by mal poskytovať spínací moment М2\u003e Мc.
Odpojenie asynchrónnych motorov s fázovým rotorom od siete sa vykonáva vždy, keď je obvod rotora skratovaný, aby sa zabránilo prepätiu vo fázach vinutia statora, ktoré môžu pri otvorenom obvode rotora prekročiť menovité napätie týchto fáz o 3 - 4 krát.

Obr. 3. Schéma zapojenia vinutí motora s fázovým rotorom: a - do siete, b - rotor, c - na svorkovnici.
Obr. 4. Zapnutie motora s fázovým rotorom: - spínací obvod, b - mechanické vlastnosti
Výskum asynchrónneho motora s fázovým rotorom Účel práce: oboznámiť sa s návrhom asynchrónneho motora s ...

Často si vybrať žiarovku, človek si nepamätá svoje hlavné vlastnosti. Navyše, mnohí kupujúci sú zmätení ...

H G I O Urengoyskoye plynového poľa - supergiant plynové pole, tretí na svete ...

Regulácia otáčok motora je určená v súlade s požiadavkami technologických procesov a ...

Podľa predbežných odhadov je Sukhoi Log najväčším ložiskom zlatých rúd v Rusku. Veľké zásoby ...

Tento článok predstavuje všeobecné zásady pre výber elektromerov a vlastností, ktoré ...

Kontaktné šošovky, ktorých účelom je korigovať videnie, možno považovať za neplánované optické ...
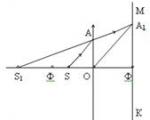
a) Vytvoríme obraz svetelného bodu umiestneného na hlavnej optickej osi v troch prípadoch: 1) bod S ...

Aby sa znížil počet vodičov medzi generátorom a spotrebiteľom, fázové vinutia by mali byť pripojené medzi ...
Energetické zdroje moderných elektrických inštalácií sú zvyčajne trojfázové elektrické siete, ktoré ...
Telegramy vo veľkých mestách už dlho nahradili e-maily, telexy s modernými počítačmi a nahradili ...

Niekedy musíte nezávisle vyrábať výkonový transformátor pre usmerňovač. V tomto prípade najjednoduchšie ...

Dnes je ťažké predstaviť si veľké obchodné, vzdelávacie, kancelárske a skladové priestory bez svetelného ...

Podmienky pre výber elektromotora Voľba jedného z katalógových typov elektromotorov sa zvažuje ...

Teraz existuje toľko lámp s rôznymi typmi upevnení. Tento GX53, a GX70, atď, sú tiež nájdené ...

Kontaktné šošovky, ktorých účelom je korigovať videnie, možno považovať za neplánované optické ...