Základné informácie pre sokle
Často si vybrať žiarovku, človek si nepamätá svoje hlavné vlastnosti. Navyše, mnohí kupujúci sú zmätení ...
![]()
Regulácia otáčok motora sa určuje v súlade s požiadavkami technologických procesov a výrobných mechanizmov, v ktorých sa používajú. Je charakterizovaná nasledujúcimi kľúčovými ukazovateľmi.
Rozsah regulácie D (limit zmeny otáčok). Táto hodnota sa vzťahuje na pomer maximálnych otáčok motora k jeho minimálnej rýchlosti.
Hladká regulácia, ktorý sa vyznačuje minimálnym skokom otáčok motora pri prepínaní z jednej mechanickej charakteristiky na druhú.
Smer možnej zmeny otáčok motora (riadiaca zóna).
Pri menovitých prevádzkových podmienkach (napätie a frekvencia sieťového napájania) má motor prirodzenú mechanickú charakteristiku. Pri nastavovaní rýchlosti sa zodpovedajúce charakteristiky budú líšiť od prirodzených. Tieto charakteristiky sa nazývajú umelé (prispôsobovacie) charakteristiky. Pomocou niektorých metód regulácie je možné získať umelé charakteristiky, ktoré sa nachádzajú len pod prírodným. Iné metódy poskytujú reguláciu rýchlosti nad a pod prirodzenými vlastnosťami. Účinnosť regulácie je daná dodatočnými kapitálovými výdavkami potrebnými na vytvorenie nastavovacích zariadení, ako aj stratou elektriny počas regulácie.
Treba poznamenať, že v niektorých prípadoch, napríklad pri mechanizmoch, ktoré pracujú relatívne krátko na umelých vlastnostiach, bude strata elektrickej energie aj pri nehospodárnych metódach kontroly malá (práca pri nízkych rýchlostiach dokončovania výťahov, žeriavov atď.). Zároveň je racionálnejšie používať jednoduché a lacné spôsoby regulácie otáčok motora, aj keď je nehospodárne z hľadiska spotreby energie.
Prípustné zaťaženie motora počas jeho prevádzky na nastavovacích charakteristikách je obmedzené veličinami prúdov v obvodoch statora a rotora. Toto zaťaženie je určené prípustným zahrievaním motora a je do značnej miery určované mechanickými charakteristikami výrobných mechanizmov, momentom odporu na hriadeli, momentom zotrvačnosti motora a mechanizmu atď.
Regulácia rýchlosti otáčania asynchrónnych motorov môže byť ovplyvnená zo strany statora alebo zo strany rotora. Všetky tri metódy sú v praxi široko používané. Zvážte tieto metódy podrobnejšie.
Regulácia rýchlosti zmenou frekvencie napájania je najekonomickejší spôsob regulácie a umožňuje získať dobré mechanické vlastnosti pohonu. Pri zmene frekvencie sieťového napájania sa mení frekvencia otáčania magnetického poľa indukčného motora. Napájanie motora musí konvertovať napätie štandardnej sieťovej frekvencie 50 Hz na napätie s požadovanou frekvenciou. Súčasne so zmenou frekvencie by sa napätie aplikované na motor malo regulovať podľa určitého zákona, aby sa zabezpečila vysoká tuhosť mechanických vlastností a požadovaná preťažiteľnosť motora. Pri nastavovaní otáčok asynchrónnych motorov zmenou frekvencie sieťového napájania je možné zabezpečiť rôzne režimy prevádzky: s konštantným krútiacim momentom; s konštantným výkonom hriadeľa; s momentom úmerným štvorcu frekvencie.
Vzťahy medzi nastaviteľným napätím a frekvenciou, berúc do úvahy vplyv aktívneho odporu statora, zmeny tuhosti mechanických vlastností, saturácie ocele, zhoršenie prenosu tepla pri nízkych frekvenciách otáčania rotora motora, sú pomerne zložité. Ako zdroj energie sa môžu použiť rotačné meniče s použitím elektrických strojov alebo statické frekvenčné meniče na polovodičových zariadeniach, ktoré sú komerčne vyrábané priemyslom. Pozitívnou vlastnosťou regulácie frekvencie je možnosť hladkej regulácie v širokom rozsahu na obidve strany prirodzených charakteristík (vrátane možného otáčania motora s frekvenciou väčšou ako nominálna). Pri regulácii je zabezpečená tuhosť charakteristík a vysoká schopnosť prekládky. V niektorých prípadoch však v pohonoch kovoobrábacích strojov, elektrických vretien, vysokovýkonných dúchadiel a iných mechanizmov je frekvenčná regulácia najprijateľnejšia.
Regulácia rýchlosti zmenou počtu pólov V statorovom vinutí je zaistená zmena frekvencie otáčania magnetického poľa statora. S konštantnou frekvenciou sieťového napájania sa frekvencia otáčania magnetického poľa a frekvencia otáčania rotora, ktoré sú ním určené, menia nepriamo s počtom pólov. Pretože počet pólov, fixovaných v krokoch, sa môže rovnať 2, 4, 6, 8, 10, atď., Že pri frekvencii napájacej siete 50 Hz zodpovedá synchrónnej frekvencii otáčania 3000, 1500, 1000, 750, 600 / min, atď., potom sa týmto spôsobom dá dosiahnuť len postupná regulácia.
Okrem dvojrýchlostných asynchrónnych motorov boli použité trojrýchlostné a štvorstupňové motory. V trojrýchlostných motoroch je jedno prepínateľné a jedno neprepínateľné vinutie a v štvorstupňových motoroch sú dve prepínateľné vinutia, ktoré umožňujú získať štyri synchrónne rýchlosti otáčania, napríklad 3000/1500/1000/500 ot / min. Motory so spínacím počtom párov pólov majú spravidla skrátený rotor s vinutím s klietkou. Takýto rotor poskytuje schopnosť pracovať bez dodatočného opätovného pripojenia vo svojom reťazci. V prípade fázového rotora vo viacrýchlostných motoroch by bolo potrebné vykonávať spínanie súčasne na statore a rotore, čo by komplikovalo konštrukciu rotora a prevádzku takýchto strojov. Kladné indikátory viacrýchlostných asynchrónnych motorov zahŕňajú účinnosť a relatívne veľký rozsah regulácie otáčok rotora. Nevýhodou tohto spôsobu regulácie je vyššie uvedená nemožnosť plynulej zmeny rýchlosti otáčania.
Ako bolo uvedené, v rámci jednej spoločnej priemyselnej série asynchrónnych motorov 4A sa vyrába modifikácia viacrýchlostných motorov navrhnutých na prevádzku pri dvoch, troch alebo štyroch rýchlostiach. Riadenie frekvencie pomocou zmeny sklzu je jednou z najjednoduchších metód kontroly. Súčasne, keď sa sklz zvyšuje (zvyšuje), dochádza k zmene strát rotorového vinutia (nárastu), čo vedie k zníženiu účinnosti pri regulácii.
Ovládanie sklzu môže byť uskutočnená tak zo strany statora, ako aj zo strany rotora. Prirodzene, v druhom prípade musí byť rotor fázový a musí mať vinutie privedené na klzné krúžky. Pri nastavovaní zo strany statora sa mení napätie aplikované na jeho vinutie. Zvýšenie napätia nad menovité napätie vedie k nasýteniu magnetického obvodu motora, a preto sa neuplatňuje.
Na reguláciu otáčok znížte napájacie napätie. V tomto prípade sa krútiaci moment vyvíjaný motorom mení v pomere k štvorcu napätia a tým aj mechanické vlastnosti zmeny motora, v dôsledku čoho sa menia aj hodnoty pracovného sklzu. Pri regulácii zo strany rotora sa reostatická regulácia otáčok aplikuje hlavne zavedením ďalších aktívnych odporov (odporov) do obvodu navíjania rotora. Je dôležité poznamenať, že zmena v širokom rozsahu otáčok motora s týmto spôsobom regulácie nebude znamenať zmeny maximálneho (kritického) krútiaceho momentu. Tým sa neznižuje preťažiteľnosť motora počas regulácie.
Tam sú polohy v elektrických inštaláciách, keď nie je možné bez elektromotora bežiaceho na jednosmerný prúd. Je to tento elektromotor, ktorý sa dá nastaviť rýchlosťou otáčania rotora, ktorá sa vyžaduje v elektrických inštaláciách. Je pravda, že má veľa nedostatkov a jedným z nich je rýchle opotrebovanie kefiek, ak ich inštalácia bola vykonaná s zakrivením a ich životnosť je dosť nízka. Pri opotrebovaní dochádza k iskreniu, preto nie je možné tento motor používať vo výbušných a prašných priestoroch. Navyše, jednosmerný motor je drahý. Na zmenu tejto situácie použite asynchrónny motor a frekvenčný regulátor pre asynchrónny motor.
Takmer vo všetkých ohľadoch elektromotory pracujúce na striedavom prúde prekonávajú svoje náprotivky na konštantný prúd. Po prvé, sú bezpečnejšie. Po druhé, majú menšie rozmery a hmotnosť. Po tretie, cena je nižšia. Po štvrté, ľahšie sa ovládajú a pripájajú.
Ale majú jednu nevýhodu - je to obtiažnosť ovládania rýchlosti otáčania. V tomto prípade tu nie sú vhodné štandardné spôsoby regulácie frekvencie asynchrónnych motorov, menovite zmeny napätia, inštalácia odporu a podobne. Frekvenčné riadenie asynchrónneho elektromotora - nastal problém číslo jedna. Hoci teoretický základ je známy už z tridsiatych rokov minulého storočia. Celá vec spočívala na vysokých nákladoch na frekvenčný menič. Všetko sa zmenilo, keď vymysleli mikročipy, pomocou ktorých bolo možné zostaviť frekvenčný menič s minimálnymi nákladmi cez tranzistory.
Spôsob riadenia rýchlosti otáčania asynchrónneho motora je teda založený na jedinom vzorci. Tu je to nižšie.
ω = 2πf / p, kde

To znamená, že je možné zmeniť rýchlosť otáčania elektromotora len zmenou frekvencie napätia. Čo to dáva v praxi? Prvým z nich je hladkosť motora, najmä pri štartovaní zariadenia, keď samotný motor pracuje pri najvyššom zaťažení. Druhým je zvýšený sklz. Vďaka tomu sa zvyšuje účinnosť a znižuje sa výkonová charakteristika.
Všetky moderné frekvenčné meniče sú založené na princípe tzv. Dvojitej konverzie. To znamená, že striedavý prúd je konvertovaný na jednosmerný prúd cez nespravovaný usmerňovač a filter. Ďalej cez pulzný menič (je to trojfázový) dochádza k spätnej transformácii jednosmerného prúdu na striedavý prúd. Menič sa skladá zo šiestich výkonových spínačov (tranzistor). Takže každé vinutie elektromotora je pripojené k špecifickým kľúčom usmerňovača (kladným alebo záporným). Je to menič, ktorý mení frekvenciu napätia, ktoré je aplikované na statorové vinutia. V skutočnosti je to prostredníctvom neho, že nastáva frekvenčná regulácia motora.

V tomto zariadení sú nainštalované výstupné tranzistory. Vykonávajú úlohu kľúčov. Ak ich porovnáme s tyristormi, je potrebné poznamenať, že prvý z nich produkuje signál vo forme sínusoidu. Je to práve táto forma, ktorá vytvára minimálne skreslenie.
Teraz princíp činnosti frekvenčného meniča. Aby sme to pochopili, navrhujeme rozobrať obrázok nižšie.

Poďme sa teda pozrieť na obrázok, kde
Podľa schémy je veľmi jasne vidieť, že menič nastavuje frekvenciu napätia v dôsledku systému riadenia šírky impulzov (je vysokofrekvenčný). Práve táto časť regulátora je zodpovedná za striedavé pripojenie vinutí statora elektromotora k kladnému pólu usmerňovača a potom k zápornému pólu. Frekvencia pripojenia k pólom sa vyskytuje v sínusovej krivke. Frekvencia impulzov je určená frekvenciou PWM. Takto dochádza k regulácii frekvencie.
Regulovať zmenu: frekvenciu prúdu; počet párov pólov vinutia statora; parametrov obvodu statora alebo rotora. Pre asynchrónne elektromotory sa používajú všetky tri spôsoby regulácie pre synchrónne - iba prvé.
Pri motoroch na striedavý prúd sa otáčky riadia spôsobom špecifikovaným pre jednosmerný motor s sériovým budením.
Regulácia rýchlosti zmenou frekvencie prúdu je najekonomickejšia, ale na napájanie motora je potrebný samostatný generátor alebo menič s nastaviteľnou frekvenciou a napätím. Pri tejto metóde je potrebné usilovať sa o to, aby charakteristiky asynchrónneho elektromotora mali dostatočnú tuhosť, čo je zabezpečené spoločnou reguláciou frekvencie prúdu a napätia.
S proporcionálnym poklesom frekvencie prúdu a napätia sa tuhosť mechanickej charakteristiky 1 (obr. 1) a maximálny moment Mmax mierne znižujú v porovnaní s prirodzenou charakteristikou 0. Výhody frekvenčnej regulácie zahŕňajú široký rozsah (až 12: 1) a hladkosť.
Regulácia rýchlosti otáčok zmenou počtu párov pólov sa používa len pre asynchrónne motory s rotorom vačkovej klietky, pretože motory s fázovým rotorom by vyžadovali súčasné prepínanie vinutia rotora, čo komplikuje jeho konštrukciu a dizajn.
Počet párov pólov možno zmeniť prepnutím počtu úsekov jedného vinutia alebo prepnutím dvoch nezávislých vinutí. V prvom prípade sa vinutie statora skladá z dvoch rovnakých častí, zapojených sériovo alebo paralelne. Tento prepínač umožňuje meniť počet párov pólov o 2-násobok, a preto meniť frekvenciu otáčania elektromotora v pomere 2: 1. Použitie dvoch vinutí s rôznym počtom párov pólov umožňuje meniť rýchlosť otáčania v rôznych pomeroch, napríklad 1: 3; 2: 3 atď.

Obr. 1. Mechanické charakteristiky asynchrónneho motora pri rôznych prúdových frekvenciách
Okrem dvojrýchlostných motorov sa používajú troj- a štvorstupňové motory. Priemysel vyrába dvojrýchlostné motory s jedným vinutím v statore, troj- a štvorrýchlostných motoroch s dvoma vinutiami, ktoré je možné prepínať v pomere 2: 1. Tento spôsob regulácie je ekonomický (motory majú pomerne tuhé charakteristiky), ale vyžaduje zložité spínacie zariadenie; okrem toho, pre motory s dvoma vinutiami, je použitie aktívnej medi výrazne znížené, pretože druhé je vypnuté, keď je jedno vinutie v činnosti. Vďaka svojim výhodám sú však motory s prepínaním počtu párov pólov široko používané v lodných elektrických pohonoch, ktoré nevyžadujú plynulú reguláciu rýchlosti otáčania (veže, navijaky atď.).
Regulácia zmenou parametrov obvodov motora je bežná v motoroch s fázovým rotorom. Keď sa do obvodu rotora zavádza aktívny odpor, otáčky motora sa znižujú pri rovnakej hodnote krútiaceho momentu (). Tento spôsob je nehospodárny, vyžaduje drahý a ťažkopádny reostat a zníženie rýchlosti otáčania je 10 až 20%, takže v podmienkach lode sa používa relatívne zriedka a hlavne na krátku dobu.
Spustenie synchrónnych motorov. Existujú priame štarty a štart s obmedzeným štartovacím prúdom.
Priamy štart je jednoduchý, ale pri zapnutí sa vyskytujú veľké štartovacie prúdy, dosahujúce hodnoty I n = (4-7) I nom.
Pri napájaní elektromotora z elektrárne s obmedzeným výkonom môžu spínacie prúdy spôsobiť neprijateľné krátkodobé poklesy napätia, čo narúša prácu zahrnutých prijímačov elektrickej energie. Preto sa použije priamy štart, ak výkon elektromotora je mnohonásobne menší ako výkon elektrárne, z ktorej je napájaný.
Keď je výkon elektromotora porovnateľný s výkonom elektrárne, používajú sa rôzne spôsoby štartovania s obmedzeným štartovacím prúdom: zapnutím vinutia statora motora; s pomocou; zahrnutie odporov do statorového obvodu; zahrnutie reaktorov do statorového obvodu; zahrnutie odporov do rotorového obvodu (pre motory s fázovým rotorom).
Pri spustení spínaním vinutí statora z „hviezdy“ na „trojuholník“ sa spínač Q1 najprv zatvorí a vinutie statora motora zapne „hviezdu“ (obr. 2, a). Po zrýchlení motora sa prepínač Q1 otvorí a spínač Q2 sa zatvorí a vinutia sa zapnú do polohy „delta“. Týmto spôsobom sa štartovací prúd zníži 3-krát.

Obr. 2. Naštartujte motor prepnutím z "hviezdy" na "trojuholník"
Výhodou štartovania motora s autotransformátorom v porovnaní s predchádzajúcou metódou je schopnosť nastaviť akékoľvek počiatočné napätie (obr. 3, a) a potom ho plynulo zvýšiť. Nevýhodou tejto metódy sú vysoké náklady, veľká hmotnosť a celkové rozmery východiskového autotransformátora. Charakteristiky sú znázornené na obr. 3, b.
Zahrnutie odporov (obr. 4, a) alebo reaktorov v čase vypustenia do obvodu statora vedie k veľkým aktívnym stratám v prípade odporov a zníženiu účinníka v prípade reaktorov, avšak v dôsledku jednoduchosti týchto metód sú široko používané. Ako je možné vidieť zo vzorcov () a (), zahrnutie prvkov do obvodu statora zvyšuje kritickú frekvenciu otáčania Mmax 1 a znižuje moment Mmax (charakteristika 1, obr. 4, b).
Spustenie motorov s fázovým rotorom sa vykonáva pomocou štartovacích reostatov pripojených na rotorový okruh (obr. 5, a).
Štartovací reostat pozostáva z troch až štyroch častí rezistorov pre každú fázu. Pri zrýchľovaní motora sú reostatové sekcie striedavo skratované. Odpor štartovacieho reostatu sa vypočíta pomocou graficko-analytickej metódy s použitím štartovacej schémy. Na začiatku rozbehu rotorového obvodu sa zapne impedančný reostat, pri ktorom by mal byť štartovací moment Mn = (0,7 - 0,8) Mmax.
Mechanické charakteristiky asynchrónneho motora v pracovnej oblasti od M = 0 do M = 0,8 M max je možné približne uvažovať priamo, potom na štartovacej schéme (obr. 5, b) bude umelá charakteristika zodpovedajúca začiatku štartu vyzerať ako priamka 4 prechádzajúca body n x a g

Obr. 3-5. Naštartujte motor pomocou autotransformátora (3). Naštartujte motor s odpormi v obvode statora (4). Spustenie motora s rotačným rotorom (5) \\ t
Na zvýšenie rýchlosti otáčania je potrebné vypnúť štartovaciu sekciu R3 (pozri obr. 5) zatvorením spínača Q3. Zvyčajne sa to robí v bode g "(pozri obr. 5, b) s momentom motora M 1 = (1,1-1,2) M nom. Zvyšný odpor štartovacieho odporu by mal byť taký, aby krútiaci moment motora na umelej charakteristike 3 neprekročila hodnotu štartovacieho momentu Mp, to znamená, že charakteristika 3 musí prejsť bodom „b“ (predpokladá sa, že počas zatvárania spínača Q3 sa otáčky motora n3 nemenia) Podobne sa spínače Q2 a Q1 zatvárajú, motor ide do prevádzky v súlade s charakteristikami 2 a 1, až kým nie je odpor úplne premostený t.
Ak je pre prírodné vlastnosti 1

To znamená, že pomer kritického prechodu umelej charakteristiky 2 a prirodzenej charakteristiky 1 sa rovná pomeru zníženého aktívneho odporu rotorovej fázy, vrátane odporu štartovacej sekcie reostatu, k zníženému aktívnemu odporu rotora.

Je možné vidieť, že pri všetkých identických momentoch pre prirodzené a umelé charakteristiky platí podmienka s / s kp = const pre charakteristiky 1 a 2 v momente M = M p, rovnosť


Aktívny odpor vinutia rotorového motora určuje katalóg. Ak v katalógu nie sú údaje o odporu, je možné ich vypočítať pomocou vzorca:

Brzdný režim s návratom energie do siete nastáva pri rýchlosti rotora, ktorá prekračuje frekvenciu otáčania magnetického poľa. Tento režim je možný, ak je motor zrýchlený klesajúcim bremenom alebo pri prepínaní viacstupňového elektromotora na nižšiu rýchlosť.
Keď motor zrýchľuje v dôsledku dopadajúceho zaťaženia podľa prirodzenej charakteristiky 0 (obr. 6), rýchlosť otáčania sa zvyšuje a pri M = 0 dosahuje rýchlosť otáčania magnetického poľa nx. S ďalším zrýchlením motora sa rýchlosť otáčania stáva väčšou ako nx, napätie v sieti je vyššie a stroj pracuje v režime generátora, pričom do siete dodáva aktívnu energiu. Tento režim zodpovedá časti charakteristiky v kvadrante II.
Dynamické brzdenie asynchrónneho motora Vykonáva sa odpojením vinutia statora od trojfázového sieťového napájania a jeho zapnutím na napájanie zo zdroja jednosmerného prúdu (obr. 7), zatiaľ čo v motore sa namiesto rotujúceho magnetického poľa vyskytuje stacionárny (n x = 0). V dôsledku interakcie rotujúceho rotora so stacionárnym magnetickým poľom dochádza k brzdnému momentu (pozri obr. 6, charakteristika 1). Brzdný moment možno nastaviť zmenou jednosmerného napätia alebo zmenou odporu rezistora R (pozri obr. 7).

Obr. 6-7. Mechanické vlastnosti asynchrónneho stroja s rôznymi prevádzkovými režimami (6). Schéma dynamického brzdenia asynchrónneho elektromotora (7) \\ t
Brzdenie opozíciou môže byť dosiahnutý obrátením motora za chodu prepnutím dvoch fáz vinutia statora, pričom magnetické pole sa začne otáčať v opačnom smere a spomaľuje motor. Na obr. 6, tento režim zodpovedá úseku charakteristiky 2 umiestnenému v kvadrante II. Keď sa otáčky motora znížia na nulu, musí sa vypnúť, inak sa začne otáčať v opačnom smere (časť charakteristiky 2 v kvadrante III).
Porovnanie brzdových metód
Pri porovnaní rôznych spôsobov brzdenia motorov na striedavý prúd môžeme konštatovať, že najekonomickejšie je brzdenie s návratom energie do siete, ale s ním nemôžete brzdiť motor na otáčky menšie ako je rýchlosť otáčania magnetického poľa.
Dynamické brzdenie umožňuje brzdiť motor na rýchlosť otáčania blízku nule, ale vyžaduje ďalší zdroj jednosmerného prúdu.
Odporové brzdenie je najmenej účinné.pretože pri vysokých brzdných prúdoch je brzdný moment na hriadeli motora so skráteným rotorom zanedbateľný.
Preto je tento spôsob brzdenia aplikovaný len na motory s fázovým rotorom, v ktorom je možné prostredníctvom zavedenia odporov s vysokým odporom do rotorového obvodu zvýšiť brzdný moment a súčasne znížiť prúd (pozri obr. 6, charakteristika 3).
kontakty a my okamžite podnikneme všetky kroky na odstránenie vášho materiálu.
Б DISCOVER ČLÁNKU
Zásada DPT.Stroj by mal mať dve hlavné časti: prvá časť - vytvára magnetický tok, druhá časť - v ktorej je indukovaný EMF. Prvá časť stroja DC je fixná. Vyrazené póly (2) sú upevnené na ráme (1), na ktorom sa nachádza vinutie poľa (3). Druhou časťou je kotva. Kotva sa otáča. Je to valec vyrobený z elektrických oceľových plechov (4), vo vonkajšej časti kotvy sú drážky, v ktorých sú uložené navíjacie úseky (5). Každá sekcia je pripojená na platne kolektora (6). 

Elektromagnetický moment závisí od toku a prúdu kotvy. V režime generátora je elektromagnetický moment brzdenie. Zaznamenáva sa rovnica rovnovážneho stavu momentov, kde je mechanický moment na hriadeli generátora, moment xx, elektromagnetický moment. Základná rovnica pohybu elektrického pohonu. Zavedený proces, keď ,,,, If ,,. Ak ,,. 
 Princíp regulácie rýchlosti. Z hľadiska regulácie otáčok je jednosmerný motor univerzálny. Rýchlosť môžete nastaviť zmenou odporu v obvode kotvy, prietoku a použitého napätia. To je zrejmé zo vzorca :.
Princíp regulácie rýchlosti. Z hľadiska regulácie otáčok je jednosmerný motor univerzálny. Rýchlosť môžete nastaviť zmenou odporu v obvode kotvy, prietoku a použitého napätia. To je zrejmé zo vzorca :.
Odolnosť v reťazi kotvy.Rovnice prúdov pred a po zavedení odporu
Z ktorého, t.j. prúdov, moment klesá (). Zároveň sa znižuje rýchlosť. S poklesom rýchlosti kotvy sa zvyšuje a dosiahne pôvodný prúd kotvy, ale pri nižšej rýchlosti. Regulácia frekvencie otáčania odporu v okruhu kotvy je v smere znižovania rýchlosti. 
Flow. Prúd kotvy pred a po zmene prietoku, ich postoj. rovnice 5.1. momenty. Znížte prietok, prúd kotvy sa zvýši, potom toi (zvýši).
Napätie.Regulácia rýchlosti sa vykonáva nasledujúcimi spôsobmi: A) Systém generátorového motora (GD). B) Tyristorový motor (TP-D). B) Regulácia šírky impulzu.
 A) Systém GD, ris.234. , Zvýšením budiaceho prúdu generátora vg sa zvýši tok Φ g a Eg a preto sa zvyšuje napätie na kotve motora a zvyšuje sa rýchlosť.
A) Systém GD, ris.234. , Zvýšením budiaceho prúdu generátora vg sa zvýši tok Φ g a Eg a preto sa zvyšuje napätie na kotve motora a zvyšuje sa rýchlosť.

B) Tyristorový menič. Zvýšenie regulačného uhla - plocha s polovičným obdobím sa znižuje, priemerná hodnota napätia –U cf sa znižuje, a preto sa rýchlosť otáčania znižuje.
B) Regulácia šírky impulzu.
Zmenou doby impulzu t a zmenou pracovného cyklu, kde t je čas impulzu; t p - čas pauzy. Priemerná hodnota U cf = U 0. , 
Spôsoby riadenia aktívneho a jalového výkonu synchrónneho generátora. Ako sme práve videli, ak zmeníme budenie generátora, zmeníme jalový výkon, odložíme ho alebo ho spotrebujeme. Aktívny výkon je možné regulovať len zmenou mechanického výkonu zo strany parnej turbíny alebo vodnej turbíny. Pri zvýšení aktívneho výkonu je potrebné zvýšiť mechanickú silu z turbíny.
Spustite SD. na spustenie synchrónneho motora je potrebné urýchliť jeho rotor pomocou externého krútiaceho momentu na rýchlosť otáčania blízku synchrónnemu. Kvôli chýbajúcemu štartovaciemu momentu v synchrónnom motore sa na jeho spustenie používajú nasledujúce metódy: 1 Začnite používať pomocný motor; 2Synchrónny štart motora.
1. Uvedenie do prevádzky synchrónneho motora pomocou pomocného motora sa môže vykonať len bez mechanického zaťaženia na jeho hriadeli, t. takmer nečinný. V tomto prípade sa po dobu spúšťania motor dočasne premení na synchrónny generátor, ktorého rotor sa otáča malým pomocným motorom do n = 0,95n 1. Stator tohto generátora je paralelne pripojený k sieti v súlade s podmienkami tohto spojenia. Po zapnutí statora do siete s krátkym časom uzávierky sa zapne vinutie poľa a motor sa vtiahne do synchrónneho režimu a motor pomocného pohonu sa mechanicky vypne. Tento spôsob štartovania je komplikovaný a má tiež pomocný motor.
2. Synchrónny motor v čase štartu sa stáva asynchrónnym. Pre možnosť vytvorenia asynchrónneho štartovacieho momentu v drážkach pólových nástavcov mimo pólového motora je umiestnené štartovacie skratové vinutie. Proces štartovania synchrónneho motora sa uskutočňuje v dvoch stupňoch. Keď sa zapne vinutie statora (1), v motore sa vytvorí rotujúce pole, ktoré indukuje emf v skrátenom vinutí rotora. Pod akciou, ktorá bude prúdiť v prúde prúdu. V dôsledku vzájomného pôsobenia rotujúceho magnetického poľa s prúdom v skratovanom vinutí je generovaný krútiaci moment, ako je to u asynchrónneho motora. V dôsledku tohto momentu rotor zrýchľuje na sklz blízko nuly (S = 0,05), obr. 313. Toto končí prvú etapu. Aby sa rotor motora synchronizoval, je potrebné v ňom vytvoriť magnetické pole zahrnutím jednosmerného prúdu do budiaceho vinutia (3) (prepnutím kľúča K do polohy 1). Pretože rotor je zrýchlený na rýchlosť blízku synchrónnemu, relatívna rýchlosť poľa statora a rotora je malá. Polia sa hladko nájdu. Po sérii sklzov sa pritiahnu opačné póly a rotor sa vtiahne do synchrónnosti. Potom sa rotor otáča synchrónnou rýchlosťou a jeho rýchlosť otáčania bude konštantná, obr. 313. Tým sa končí druhá etapa spustenia. Práca SD v menej nadšených a nadšených módoch (ib=
var).
Prevádzkový režim zodpovedá konštantnosti momentu. at. Pri synchrónnom motore pod napätím zodpovedá napäťová zložka -0 0 prúdu I, ktorý zaostáva za napätím Uc o uhol φ. Reaktívna zložka prúdu IL sa oneskorí o 90 ° od vektora napätia Uc, t.j. tento prúd je čisto induktívny. To znamená, že keď motor nie je excitovaný, spotrebuje indukčný prúd zo siete, a preto spotrebuje jalový výkon zo siete. 
S rastúcou excitáciou sa hodnota –E 0 1 zvyšuje a prúd I klesá na Ia = I 1 a bude minimálny. V tomto režime bude SD pracovať s cosφ = 1 a jalový výkon nebude spotrebovaný ani daný do siete. Pri ďalšom zvýšení budiaceho prúdu bude zložka napätia –E 0 11 a prúd 11 bude pred napäťovým vektorom siete pod uhlom φ 1. Tento režim zodpovedá nadmernému režimu. Reaktívna zložka prúdu bude kapacitná (pred vektorom Uc o 90 0). Tento režim bude zodpovedať návratu jalového výkonu do siete. Tento režim je podobný zahrnutiu statických tankov do siete. 

Takže vidíme, že ak sa zmení budiaci prúd iB, potom sa hodnota prúdu statora I bude meniť v rozsahu a vo fáze, t.j. Môžete nastaviť cosφ. Táto hodnotná vlastnosť určuje použitie synchrónnych motorov. Závislosti prúdu I statora na budiacom prúde ib, I = f (ib) sa nazývajú charakteristiky tvaru U, obr. 309. P2\u003e P1. Charakteristiky sú odstránené pri P = konšt. Prevádzkový režim zodpovedajúci budiacemu prúdu od 0 do bodkovanej čiary nie je excitovaný a za bodkovanou čiarou je nadexponovaný uvoľňovaním reaktívnej energie do siete.

Často si vybrať žiarovku, človek si nepamätá svoje hlavné vlastnosti. Navyše, mnohí kupujúci sú zmätení ...

H G I O Urengoyskoye plynového poľa - supergiant plynové pole, tretí na svete ...

Regulácia otáčok motora je určená v súlade s požiadavkami technologických procesov a ...

Podľa predbežných odhadov je Sukhoi Log najväčším ložiskom zlatých rúd v Rusku. Veľké zásoby ...

Tento článok predstavuje všeobecné zásady pre výber elektromerov a vlastností, ktoré ...

Kontaktné šošovky, ktorých účelom je korigovať videnie, možno považovať za neplánované optické ...
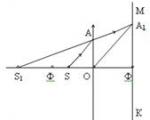
a) Vytvoríme obraz svetelného bodu umiestneného na hlavnej optickej osi v troch prípadoch: 1) bod S ...

Aby sa znížil počet vodičov medzi generátorom a spotrebiteľom, fázové vinutia by mali byť pripojené medzi ...
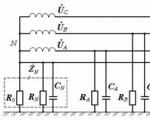
Energetické zdroje moderných elektrických inštalácií sú zvyčajne trojfázové elektrické siete, ktoré ...
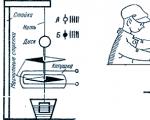
Telegramy vo veľkých mestách už dlho nahradili e-maily, telexy s modernými počítačmi a nahradili ...

Niekedy musíte nezávisle vyrábať výkonový transformátor pre usmerňovač. V tomto prípade najjednoduchšie ...

Dnes je ťažké predstaviť si veľké obchodné, vzdelávacie, kancelárske a skladové priestory bez svetelného ...

Podmienky pre výber elektromotora Voľba jedného z katalógových typov elektromotorov sa zvažuje ...
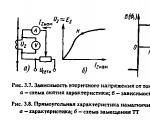
VOĽBA BEŽNÝCH TRANSFORMÁTOROV A PRÍSLUŠNÉHO DRUHÉHO NÁKLADU, berúc do úvahy záťažový prúd chráneného prvku, jeho ...

Kontaktné šošovky, ktorých účelom je korigovať videnie, možno považovať za neplánované optické ...

Nikto nechce strácať energiu. Snažíme sa zlepšiť efektivitu - naše ...