Meranie odporu testerom - funkcie procesu
Existuje veľa situácií, kedy bude užitočné vedieť, ako merať odpor pomocou multimetra a existuje nejaký rozdiel, ako ...
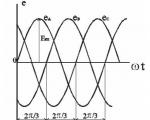
Výkon asynchrónneho motora sa nazýva závislosť účinnosti η, výkonový faktor, vstupný výkon, prúd, krútiaci moment na hriadeli motora, sklz Srýchlosť otáčania z hodnoty užitočného výkonu na hriadeli motora pri konštantnom napätí a frekvencii prúdu v sieti (obrázok 6).
Závislosť je krivka, veľmi mierne sklonená k osi osi osi. Rýchlostná odozva je mierne odlišná od mechanického výkonu motora: môže sa nazývať tuhý.
Závislosť. Pri ustálenom režime, kde je účinný brzdný moment motora a krútiaci moment x.x. Od chvíle, keď sa zaťaženie mení z hodnoty x.h. na číslo otáčky asynchrónnych motorov zostávajú takmer konštantné, závislosť indukčného motora je takmer priamočiare; pretína os y na zodpovedajúcom bode.
Faktor výkonu
Asynchrónny motor, ako transformátor, spotrebuje zaťažený prúd zo siete. Preto sú energetické procesy vyskytujúce sa v asynchrónnom motore, charakterizované dvomi množstvami: aktívny výkon a jalový výkon Q I
Pomer medzi a Q I: ![]()
Faktor výkonu asynchrónneho motora závisí od zaťaženia na hriadeli.
Keď x.h. ak je energia spotrebovaná len na pokrytie malých strát statora a menších mechanických strát, aktívny výkon je dvojaký a reaktívny výkon je vysoký, pretože rotačné magnetické pole s maximálnym pólovým prúdom je excitované v aute pri normálnom napätí. Preto keď x.h. asynchrónny motor má
![]()
Pri postupnom zvyšovaní zaťaženia sa aktívny výkon zvyšuje a jalový výkon zostáva takmer konštantný, pretože pri konštantnej amplitúde sieťového napätia zostáva tok hlavného poľného pólu rovnaký ako pri x.x. V dôsledku toho so zvyšujúcim sa mechanickým výkonom motora sa tiež zvyšuje výkonový faktor. Pri zaťažení v blízkosti nominálnej hodnoty dosiahne najvyššiu hodnotu (0,75-0,95). Avšak s ďalším nárastom brzdného momentu na hriadeli, sprevádzaný poklesom rýchlosti rotora a výrazným nárastom prúdov v statorovej a rotorovej vinutie, sa účinok znižuje, čo je vysvetlené zvýšeným rozptýleným poľom a rýchlejším rastom jalového výkonu v porovnaní s aktívnym výkonom.
Udržanie vysokého faktora je dôležité pre ekonomickú dodávku energie podnikov. Najmä predĺžené x.h. indukčný motor: ak na jednotlivých strojoch nie je práca, motor sa odpojí od siete. Ďalej je potrebné zabezpečiť, aby sila zariadenia poháňaná asynchrónnym motorom bola trochu odlišná od menovitého výkonu motora. Ak počas dlhodobej činnosti asynchrónneho motora jeho priemerný výkon nepresahuje 45% menovitého výkonu, takýto elektrický motor sa nahradí zodpovedajúcim výkonom motora.
V prípadoch, keď je prevádzka motora pri plnom zaťažení kombinovaná s jeho prácou s významným zaťažením, pri ktorom sa stane neprijateľne nízkou, sa použijú špeciálne opatrenia na zvýšenie účinníka. Ak to robíte, keď asynchrónny motor beží s výrazným zaťažením / napr. P 2<0,5 Р 2Н / снижают фазные напряжения на его статорной обмотке. Тем самым поток полюса вращательного поля, а, следовательно, и реактивная мощность машины будут уменьшены. Наиболее просто это достигается в двигателях, допускающих пересоединение фаз обмотки статора с на Y a zahrnuté do siete s lineárnym napätím rovným menovitému fázovému napätiu. Potom pri práci s bremenom v blízkosti nominálnej fázy statorového vinutia. , a pri výraznom nedostatočnom zaťažení - Y, To vedie k poklesu fázového napätia c. Toto opätovné pripojenie fáz statorového vinutia sa zvyčajne vykonáva pomocou automatického zariadenia. Motor, vybavený takým zariadením, pracuje v širokom rozsahu zmien zaťaženia s blízkymi nominálnymi hodnotami.
efektívnosť indukčný motor
![]()
P1 = strata P2 + ΔP
Straty sa dajú rozdeliť na trvalé, prakticky nezávislé na zaťažení / strate ocele statorového jadra, mechanické straty /, ktoré sa experimentálne stanovujú zo skúseností s chemickým zložením; Variabilné straty - straty na vykurovanie statora a rotorových vodičov
a dodatočné straty.
efektívnosť motor dosiahne svoju maximálnu hodnotu (65-95%), keď sú premenné straty konštantné. Väčšina motorov má túto maximálnu účinnosť. sa uskutočňuje približne pri zaťažení rovnajúcom sa 75% nominálnej hodnoty, pretože motory sú navrhnuté s ohľadom na skutočnosť, že nie sú vždy úplne naložené.
Pri príprave na prácu opakujte teoretický materiál: princíp činnosti a zariadenie trojfázového asynchrónneho motora; koncepcia sklzu; elektromagnetický moment asynchrónneho motora; závislosť momentu na sklzu; kapacita preťaženia asynchrónneho motora; výkon trojfázového asynchrónneho motora.
Program práce.
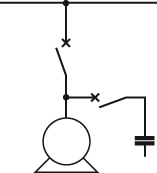
1. Študovať princíp fungovania, zariadenia a účelu hlavných konštrukčných prvkov asynchrónneho motora (BP) so skriňovou vežou.
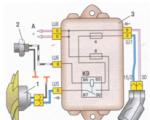
2. Zoznámiť sa so schémou testovania krvného tlaku (obrázok 7) as laboratórnou laboratóriou.
3. Z údajov pasu sa vypočíta čas vyvíjaný motorom s nominálnym režimom prevádzky. Vyplňte nižšie uvedenú tabuľku.
4. Označte fázy statora HELL pomocou diagramov z obr. 8 a obr. 9.
5. Poznať sieťové napätie ( U A = 380V), zdôvodnite výber spojovacieho obvodu statorových vinutí v nominálnom režime motora.
6. Zhromaždite vybranú schému možností. Spustite motor bez zaťaženia. Zmerajte prúd prúdu a bez zaťaženia. Vypočítajte množstvo štartovacieho prúdu, keď je motor zapnutý bez zaťaženia.
7. Odstráňte údaje a vytvorte výkon motora a mechanický výkon.
8. Vyhotovte správu a urobte záver o vykonanej práci.
Vznik termínu "reaktívna" sila je spojený s potrebou izolovať energiu spotrebovanú zaťažením, komponentom, ktorý generuje elektromagnetické polia a poskytuje krútiaci moment motora. Táto zložka sa vyskytuje pri induktívnej povahe nákladu. Napríklad pri pripojení elektrických motorov. Prakticky všetko zaťaženie domácností, nehovoriac o priemyselnej výrobe, je do istej miery induktívne.
V elektrických obvodoch, ak je záťaž aktívna (odporová) v prírode, prúdový prúd je vo fáze (nevedie alebo zaostáva) z napätia. Ak je záťaž indukčne v prírode (motory, transformátory pri voľnobehu), prúd zaostáva za napätím. Keď má záťaž kapacitnú povahu (kondenzátory), prúd vedie napätie.
Celkový prúd spotrebovaný motorom je určený vektorovou sumou:
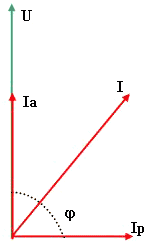
Tieto prúdy sú spojené s výkonom spotrebovaným motorom.
Reaktívna energia nevytvára mechanickú prácu, aj keď je to nevyhnutné pre prácu motora, preto musí byť získaná na mieste, aby ju nemohla spotrebovávať od organizácie poskytujúcej energiu. Preto znižujeme zaťaženie drôtov a káblov, zvyšujeme napätie na svorkách motora, znižujeme platby za jalový výkon, máme možnosť pripojiť ďalšie stroje znížením prúdu spotrebovaného z výkonového transformátora.
Nastaví sa parameter určujúci spotrebu jalového výkonu Cos (φ)
Cos (φ) = P 1 Harm / A 1 Poškodenie
A = √P2 + Q2
Takže cos (φ) klesá, keď sa zvyšuje spotreba jalového výkonu záťaže. Je potrebné sa snažiť zvýšiť cos (φ), pretože nízka cos (φ) má nasledujúce problémy:
Z vyššie uvedeného je zrejmé, že je potrebná kompenzácia jalového výkonu. Čo možno ľahko dosiahnuť pomocou aktívnych kompenzačných zariadení. Kondenzátory, v ktorých sa kompenzuje jalový výkon motorov.
Spotrebitelia s aktívnou energiou(transformátory, vedenia, reaktory) a také elektrické prijímače, ktoré konvertujú elektrickú energiu na iný druh energie, ktorá podľa svojho princípu pôsobenia používa magnetické pole (indukčné motory, indukčné pece atď.). ). Asynchrónne motory a transformátory spotrebúvajú až 80-85% celkového jalového výkonu spojeného s tvorbou magnetických polí. Relatívna malá časť celkovej rovnováhy jalovej energie spadá pod podiel ostatných spotrebiteľov, napríklad indukčné pece, zváracie transformátory, transformátory, luminiscenčné osvetlenie atď.
Transformátor ako spotrebič reaktívnej sily, Transformátor je jedným z hlavných prepojení prenosu elektriny z elektrárne na spotrebiteľa. V závislosti od vzdialenosti medzi elektrárňou a spotrebiteľom a zo schémy prenosu energie sa počet transformačných krokov pohybuje od dvoch do šiestich. Inštalovaná kapacita transformátora je preto zvyčajne niekoľkonásobne vyššia ako celkový výkon generátorov elektrického systému. Každý transformátor samotný je spotrebiteľom reaktívnej sily. Reaktívna energia je potrebná na vytvorenie premenlivého magnetického toku, prostredníctvom ktorého sa energia z jedného vinutia transformátora prenáša na iný.
Asynchrónny motor ako spotrebič reaktívneho výkonu, Spolu s aktívnym výkonom asynchrónne motory spotrebúvajú až 60-65% celkového jalového výkonu záťaže elektrizačnej sústavy. Princípom prevádzky je asynchrónny motor podobný transformátoru. Rovnako ako v transformátore, energia primárneho vinutia motora - stator sa prenáša na sekundárne - rotor magnetickým poľom.
Indukčné pece ako spotrebiče reaktívneho výkonu, Veľké elektrické prijímače vyžadujúce vysoký jalový výkon na ich prevádzku sú predovšetkým priemyselné indukčné pece na tavenie kovov. Tieto pece sú v podstate silné, ale nie sú perfektné z hľadiska transformátorových konštrukčných transformátorov, ktorých sekundárne vinutie je kovový (náboj), roztavený prúdmi, ktoré sú v ňom vyvolané.
Inštalácia konvertorovpremeny striedavého prúdu na jednosmerný prúd pomocou usmerňovačov, patria aj veľkým spotrebiteľom jalového výkonu. Usmerňovacie jednotky sú široko používané v priemysle a doprave. Napríklad vyššie elektrárne s ortuťovými konvertormi sa používajú na napájanie elektrických izolačných kúpeľov, napríklad pri výrobe hliníka, hydroxidu sodného atď. Železničná doprava v našej krajine je takmer úplne elektrifikovaná, pričom značná časť železníc využíva konvertory jednosmerného prúdu.
Na druhej strane prvky distribučnej siete (prenosové vedenia, stupňovité a stupňovité transformátory) majú vďaka konštrukčným vlastnostiam indukčnú pozdĺžnu odolnosť. Preto aj pri zaťažení, ktoré spotrebuje len aktívny výkon, bude na začiatku distribučnej siete indukčná zložka - reaktívny výkon. Veľkosť tejto jalovej energie závisí od indukčného odporu distribučnej siete a je úplne vynaložená na straty v prvkoch tejto distribučnej siete.
V prípade najjednoduchšej schémy:
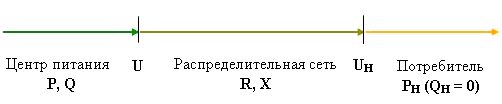
Výsledkom je, že bez ohľadu na povahu záťaže sa bude reakčný výkon Q prenášať zo zdroja energie do distribučnej siete.Ak záťaž je motívom, situácia sa zhoršuje - hodnoty výkonu v energetickom centre sa zvyšujú a stali sa rovnými:
P = Pn + (Pn2 + Q2) * R / Un2;
Q = Qn + (Rn2 + Qn2) * X / Un2.
Reakčný výkon prenášaný zo zdroja energie spotrebiteľovi má tieto nevýhody:
δP = (Rn2 + Qn2) * R,
Niektoré z nich (a niekedy aj významné) sú straty z prepravy reaktívnej sily.
Un = U - (P * R + Q * X) / U.
Preprava reakčnej energie prostredníctvom distribučných sietí z energetických centier na spotrebiteľov sa tak stáva zložitým technickým a ekonomickým problémom, ktorý ovplyvňuje hospodárnosť a spoľahlivosť systémov napájania.
Klasickým riešením tohto problému v distribučných sieťach je kompenzácia jalového výkonu spotrebiteľa inštaláciou dodatočných zdrojov reaktívnej energie - spotrebiteľských statických kondenzátorov.
Použitá kompenzácia jalového výkonu:
Vzhľadom na nízku spotrebu aktívneho výkonu je výkonový faktor motora extrémne nízky pri voľnobehu alebo pri nízkych zaťaženiach. Reaktívny prúd motora zostáva pri všetkých zaťaženiach takmer konštantný, takže počet nevyložených motorov zodpovedá spotrebe jalového výkonu, ktorý má iba nepriaznivý vplyv na inštaláciu z dôvodov opísaných v predchádzajúcich častiach.
Preto sú dve dobré pravidlá, že vypnuté motory by mali byť vypnuté a menovitý výkon motorov by nemal byť nadhodnotený (pretože to zníži ich zaťaženie).
KB by mala byť pripojená priamo k terminálom motora.
Po aplikácii kompenzácie na motor sa prúd motora a kondenzátora zníži ako pred kompenzáciou v rovnakom režime zaťaženia motora. Je to preto, že významná časť reaktívnej zložky prúdu motora je dodávaná z kondenzátora, ako je znázornené na obr obr. L23.
Ak je pred pripojením motora a kondenzátora umiestnená maximálna prúdová ochrana motora (to platí vždy, keď sú kondenzátory pripojené na svorky), nastavenie ochranného relé by sa malo znížiť o pomer:
cos φ pred kompenzáciou / cos φ po kompenzácii
Pre motory s kompenzáciou v súlade s hodnotami kvar uvedenými v obr. L24 (maximálne hodnoty odporúčané na zabránenie samovlákania štandardných asynchrónnych motorov, ako je to popísané v časti Metódy zabránenia samovysvetľovania indukčného motora), hodnoty vyššie uvedeného pomeru sú uvedené pre rôzne rýchlosti na obr. L25.
Obr. L23: Pred kompenzáciou transformátor prenáša celý jalový výkon, po kompenzácii dodáva kondenzátor väčšinu jalového výkonu
| Trojfázové motory, 230/400 V | |||||
|---|---|---|---|---|---|
| Menovitý výkon | Inštalovaný výkon (kvar) | ||||
| Rýchlosť otáčania (ot / min) | |||||
| kW | hp | 3000 | 1500 | 1000 | 750 |
| 22 | 30 | 6 | 8 | 9 | 10 |
| 30 | 40 | 7,5 | 10 | 11 | 12,5 |
| 37 | 50 | 9 | 11 | 12,5 | 16 |
| 45 | 60 | 11 | 13 | 14 | 17 |
| 55 | 75 | 13 | 17 | 18 | 21 |
| 75 | 100 | 17 | 22 | 25 | 28 |
| 90 | 125 | 20 | 25 | 27 | 30 |
| 110 | 150 | 24 | 29 | 33 | 37 |
| 132 | 180 | 31 | 36 | 38 | 43 |
| 160 | 218 | 35 | 41 | 44 | 52 |
| 200 | 274 | 43 | 47 | 53 | 61 |
| 250 | 340 | 52 | 57 | 63 | 71 |
| 280 | 380 | 57 | 63 | 70 | 79 |
| 355 | 482 | 67 | 76 | 86 | 98 |
| 400 | 544 | 78 | 82 | 97 | 106 |
| 450 | 610 | 87 | 93 | 107 | 117 |
Obr. L24: Maximálna hodnota kvar individuálnej kompenzácie jalového výkonu bez rizika samovznietenia motora
Motor, ktorý má vysoké zotrvačné zaťaženie, bude po vypnutí napájania pokračovať v otáčaní (pokiaľ nie je konkrétne brzděné).
"Magnetická zotrvačnosť" obvodu rotora znamená vytvorenie emf v navíjaní statora na krátku dobu po vypnutí, ktorá sa zníži na nulu po 1 alebo 2 periónoch v prípade motora bez kompenzácie.
Pripojené kondenzátory však vytvárajú trojfázové reakčné zaťaženie pre takéto tlmené napätie, ktoré spôsobuje kapacitné prúdy vo vinutí statora. Takéto prúdy v statoru vytvárajú rotujúce magnetické pole, ktoré pôsobí presne pozdĺž tej istej osi a v rovnakom smere ako tlmené elektromagnetické pole.
V dôsledku toho sa zvyšuje tok rotora, statorové prúdy sa zvyšujú a napätie na svorkách motora niekedy stúpa na nebezpečne vysokú úroveň. Tento jav je známy ako auto-excitácia a je jedným z dôvodov, prečo generátory striedavého prúdu spravidla nefungujú s výkonnými faktormi výkonu, t. J. existuje tendencia k spontánnemu (a nekontrolovanému) sebaobitutiu.
Poznámky:
1. Vlastnosti motora poháňané zotrvačnosťou nákladu nie sú striktne totožné s charakteristikami voľnobehu. Tento predpoklad je však dosť presný z praktického hľadiska.
2. V motore, ktorý pôsobí ako generátor, sú obehové prúdy hlavne reaktívne, takže účinok brzdenia motora (spomalenie) je spôsobený hlavne záťažou reprezentovanou jeho chladiacim ventilátorom.
3. Prúd (uhol zaťaženia takmer 90 °) spotrebovaný zo zdroja energie pri nezaťaženom motore za normálnych podmienok a prúd (uhol dopredu takmer 90 °) dodávaný do kondenzátorov motorom, ktorý pôsobí ako generátor, má rovnakú fázovú súvislosť s napätím na svorkách. Preto možno na jeden graf uložiť dve charakteristiky.
Aby sa zabránilo samovoľnému budeniu, ako je opísané vyššie, menovitý výkon (kvar) kondenzátorovej banky by mal byť obmedzený na túto maximálnu hodnotu:
Kde Io je prúd bez zaťaženia motora a Un je medzifázové menovité napätie motora (kV). Na obr. Hodnota L24 poskytuje hodnoty Qc, ktoré spĺňajú toto kritérium.
príklad:
Trojfázový motor, 75 kW, 3000 ot./min., 400 V, môže mať blok kondenzátorov nie vyšší ako 17 kVr podľa obr. L24. Hodnoty tabuľky sú zvyčajne príliš malé, aby primerane kompenzovali motor na normálne požadovanú úroveň cos φ. Dodatočnú kompenzáciu je možné vykonať napríklad pomocou centralizovaného kompenzačného centra inštalovaného na autobusoch TP.
Pri akejkoľvek inštalácii s veľkým zotrvačným zaťažením poháňaným motormi musia byť vypínače alebo stýkače riadiace takéto motory rýchlo odpojené v prípade úplnej straty energie.
Ak nedôjde k takejto opatrnosti, je pravdepodobnosť extrémne vysokých napätí (v dôsledku sebaobitutia) vysoká, pretože všetky ostatné konštrukčné kancelárie pracujú v sieti paralelne s vysoko zotrvačnými kondenzátormi.
Preto ochranný obvod takýchto motorov musí obsahovať relé s maximálnym vypínaním napätia spolu s relé reverzného riadenia výkonu (motor napája zvyšok zariadenia pred rozptýlením zotrvačnej energie).
Ak kapacita jednotlivých kondenzátorov na kompenzáciu motora s vysokým zotrvačným momentom je väčšia ako odporúčaná hodnota na obr. L24, musia byť riadené samostatne pomocou spínača alebo stykača, ktorý sa spustí spolu s hlavným vypínačom alebo stykačom motora, ako je znázornené na obr. L26.
Hlavný stykač sa zapne po zapnutí kondenzátorov.
Obr. L26: Pripojenie kondenzátorovej banky k motoru
Asynchrónny výkon motora reprezentujú graficky vyjadrené závislosti otáčok n2, η, užitočný moment (krútiaci moment na hriadeli) M 2, účinník cos φ a statorový prúd I 1 na čistom výkone P 2 pri U 1 = const f 1 = const.
Rýchlostná odozva n 2 = f (P 2). Frekvencia otáčania rotora indukčného motora n 2 = n 1 (1 - s).
Slip s = P e2 / P em, to je a následne jeho rotačná frekvencia je určená pomerom elektrických strát v rotoru k elektromagnetickému výkonu. Zanedbanie elektrických strát v rotoru pri voľnobehu, môžete mať P e2 = 0, a preto s ≈ 0 a n 2 ≈ n1.
Pri náraste zaťaženia na hriadeli indukčného motora rastie pomer s = P e2 / P em pri dosiahnutí hodnôt 0,01 - 0,08 pri nominálnom zaťažení. Preto závislosť n2 = f (P2) je krivka, mierne sklonená k osi osi osi. Avšak, ako sa zvyšuje aktívny odpor rotora motora r 2 ', sklon tejto krivky sa zvyšuje. V tomto prípade sa zvyšuje frekvencia asynchrónneho motora n2 s kolísaním zaťaženia P2. To sa vysvetľuje skutočnosťou, že so stúpajúcim r2 'stúpajú elektrické straty v rotoru.
Závislosť M 2 = f (P 2). Závislosť užitočného momentu na hriadeli indukčného motora M 2 na čistom výkone P 2 je určená výrazom M 2 = P 2 / ω 2 = 60 P 2 / (2πn 2) = 9,55 P 2 / n 2, kde P 2 je čistý výkon W ; ω 2 = 2πf 2/60 - uhlová frekvencia otáčania rotora.
Z tohto výrazu vyplýva, že ak n 2 = const, potom graf M 2 = f 2 (P2) je priamka. Ale v asynchrónnom motore s rastúcim zaťažením P2 sa rýchlosť rotora znižuje a preto sa užitočný moment na hriadeli M2 s rastúcim zaťažením zvyšuje o niečo rýchlejšie ako zaťaženie, a preto má graf M2 = f (P2) krivočiary pohľad.
Závislosť cos φ 1 = f (P 2). Vzhľadom na to, že statorový prúd Ii má reaktívnu (induktívnu) zložku, ktorá je potrebná na vytvorenie magnetického poľa v statoru, činiteľ výkonu asynchrónnych motorov je menší ako jeden. Najmenšia hodnota výkonového faktora zodpovedá režimu nečinnosti. To je vysvetlené skutočnosťou, že prúd bez zaťaženia elektrického motora I0 zostáva prakticky nezmenený pri akomkoľvek zaťažení. Preto pri malom zaťažení motora je statorový prúd nízky a je veľmi reaktívny (I 1 ≈ I 0). V dôsledku toho je fázový posun statorového prúdu vzhľadom na napätie významný (φ 1 ≈ φ 0), len o niečo menší ako 90 °.
Faktor výkonu asynchrónnych motorov v kľudovom režime zvyčajne nepresahuje 0,2. Pri náraste zaťaženia hriadeľa motora sa aktívna zložka prúdu I 1 zvyšuje a výkonový faktor sa zvyšuje a dosahuje maximálnu hodnotu (0,80 - 0,90) pri zaťažení blízke nominálnemu. Ďalší nárast zaťaženia na hriadeli motora je sprevádzaný poklesom cos φ 1, čo sa vysvetľuje zvýšením rotora (x2s) v dôsledku zvýšenia sklzu a následne frekvencie prúdu v rotoru.
Aby sa zvýšil výkonový faktor asynchrónnych motorov, je mimoriadne dôležité, aby motor pracoval vždy, alebo aspoň značné časové obdobie, pri zaťažení blízke nominálnej hodnote. To možno dosiahnuť len s právom. Ak motor pracuje s podstatnou časťou naloženého času, potom na zvýšenie cos φ 1, je vhodné znížiť napätie U 1 na motor. Napríklad pri motoroch, ktoré pracujú pri pripojení vinutia statora, je možné to dosiahnuť opätovným pripojením vinutia statora, čo spôsobí pokles fázového napätia o faktor. V tomto prípade magnetický tok statora a následne magnetizačný prúd klesá približne o faktor. Navyše sa aktívna zložka statorového prúdu mierne zvyšuje. To všetko prispieva k zvýšeniu koeficientu výkonu motora.

Existuje veľa situácií, kedy bude užitočné vedieť, ako merať odpor pomocou multimetra a existuje nejaký rozdiel, ako ...
Zriadenie vzdelania "KOMUNIKÁCIA VYSOKÉHO ŠTÁTU KOMUNIKÁCIE" STANOVENIE ELEKTRÓZNEJ SILY METÓDY BEŽNÉHO ZDROJA ...

Otvorte obvod vo vinutí fáz statora. Ak sú obe fázy rozbité, generátor nebude vôbec fungovať. Ak už ...

Vladimir Malafeev Certifikovaný obchodný tréner. Vie, ako veľmi ťažko pochopiť každého. Pripojí sa ...
V závislosti od účelu sa môžu použiť napäťové transformátory s rôznymi zapojovacími obvodmi navíjania. Pre ...

Každý vie, že sa skôr alebo neskôr zrútia autá. Ale niekedy motorista čelí takému problému ako odmietnutie ...
Lúč svetla, ktorý sa pohybuje z jedného transparentného média do druhého, mení smer, alebo, ako sa hovorí, ...
Výkon asynchrónneho motora sa nazýva závislosť účinnosti η, ...
Federálna agentúra pre vzdelávanie GOU VPO "Štátna technická univerzita ...
Dnes s takým rýchlym vývojom technológií je veľmi dôležité vedieť, ako čítať elektrické obvody automobilov. A nie ...

Vo veci výstavby domu a vybavenia jeho územia sú dôležité mnohé otázky. Vrátane vzdialenosti od ...
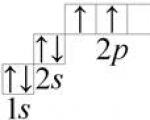
C (karbón), nekovový chemický prvok skupiny IVA (C, Si, Ge, Sn, Pb) periodického systému ...

Trochu histórie, po vyčerpávajúcom sľube na našom fóre, aby sme odhalili vyrážku ...

Podľa výkonného tajomníka výberovej komisie IzhSTU Alexander Gubert v porovnaní s minulosťou ...

Svietidlá série T8 sú vybavené LED a luminiscenčným typom. Ich prahové napätie je ...
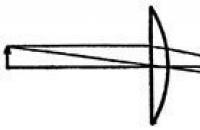
Najväčšou hodnotou pre optometriu je priechod svetla cez šošovky. Objektív sa nazýva priehľadné telo ...