 , ot./min
, ot./minVýpočet výkonu pre prúd a napätie
Ako viete, elektrické napätie by malo mať svoje vlastné opatrenie, ktoré na začiatku zodpovedá hodnote, ktorá ...
Počiatočné vlastnosti asynchrónneho motora závisia od zvláštností jeho konštrukcie, najmä od rotorového zariadenia.
Spustenie asynchrónneho motora je sprevádzané prechodným procesom stroja spojeným s prechodom rotora zo stavu pokoja do stavu rovnomerného otáčania, v ktorom krútiaci moment motora vyvažuje moment odporových síl na hriadeli stroja.
Pri spustení asynchrónneho motora dochádza k zvýšeniu spotreby elektrickej energie zo sieťového napájania, ktorá sa vynakladá nielen na prekonanie brzdného momentu pôsobiaceho na hriadeľ a na krytie strát v samotnom indukčnom motore, ale aj na vyslanie určitej kinetickej energie do pohyblivých článkov výrobnej jednotky. Preto pri štartovaní asynchrónneho motora musí vzniknúť zvýšený krútiaci moment.
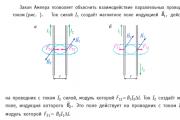
pre asynchrónny motor s fázovým rotorom počiatočný rozbehový krútiaci moment zodpovedajúci sklzu sp = 1 závisí od aktívnych odporov nastaviteľných odporov zavedených do obvodu rotora.
Obr. 1. Začiatok trojfázového asynchrónneho motora s fázovým rotorom: a - grafy krútiaceho momentu motora s fázovým rotorom na sklz pri rôznych aktívnych odporoch odporov v obvode rotora, b - obvod pre pripojenie odporov a uzatvárajúce akceleračné kontakty na obvod rotora.
Takže pri uzavretých kontaktoch akcelerácie U1, U2, t.j. pri spustení asynchrónneho motora s uzavretými kontaktnými krúžkami, je počiatočný počiatočný moment Mp1 = (0,5 - 1,0) Mn, a počiatočný štartovací prúd jan = (4,5- 7) jamr.a ďalšie.
Malý počiatočný točivý moment asynchrónneho motora s fázovým rotorom nemusí byť dostatočný na aktiváciu výrobnej jednotky a jej následné zrýchlenie a významný rozbehový prúd spôsobí zvýšené zahriatie vinutia motora, čo obmedzuje frekvenciu jej štartov a v sieťach s nízkym výkonom vedie k nežiaducemu prevádzkovaniu iných prijímačov. dočasný pokles napätia. Tieto okolnosti môžu byť dôvodom, s výnimkou použitia asynchrónnych motorov s fázovým rotorom s veľkým rozbehovým prúdom na pohon pracovných mechanizmov.

Úvod do obvodu rotora motoricky nastaviteľných rezistorov nazývaných štartovanie nielenže znižuje počiatočný štartovací prúd, ale súčasne zvyšuje počiatočný rozbehový moment, ktorý môže dosiahnuť maximálny moment Mmax (obr. 1, a, krivka 3), ak kritický sklon motora s fázovým rotorom
scr =(R2" + Rd ") / (X1 + X2") = 1,
kdeRd " - aktívny odpor rezistora vo fáze navíjania rotora motora, zmenšený na fázu vinutia statora. Ďalšie zvýšenie aktívneho odporu štartovacieho odporu je nepraktické, pretože vedie k oslabeniu počiatočného východiskového krútiaceho momentu a výstupného bodu maximálneho momentu v klznej oblasti s\u003e 1, čo eliminuje možnosť zrýchlenia rotora.
Požadovaná odolnosť odporov pre spúšťanie motora s fázovým rotorom je stanovená na základe požiadaviek štartu, čo môže byť jednoduché, keď MP = (0,1 až 0,4)Mmr.normálne, ak Mn - (0,5 - 0,75) Ma ťažké Mn ≥ Me.
Na udržanie dostatočne veľkého krútiaceho momentu s motorom fázového rotora počas zrýchlenia výrobnej jednotky, aby sa skrátila doba trvania prechodového procesu a znížilo ohrev motora, je potrebné postupne znižovať odpor počiatočných odporov. Prípustná zmena momentu v procese zrýchlenia M (t) je určená elektrickými a mechanickými podmienkami, ktoré obmedzujú maximálny momentový limit M\u003e 0,85 Mmh, spínací moment M2 \u003e\u003e MS (obrázok 2) a zrýchlenie.
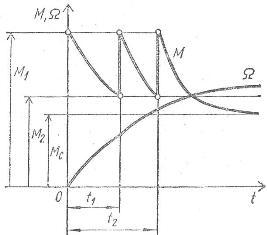
Obr. 2. Charakteristiky štartu trojfázového asynchrónneho motora s fázovým rotorom

Spínanie počiatočných rezistorov je zabezpečené striedavým zapnutím striedavých stýkačov Y1, Y2 v čase t1, t2 od momentu spustenia motora, keď sa pri zrýchlení krútiaci moment M rovná spínaciemu momentu M2. Z tohto dôvodu sú počas celého spustenia všetky špičkové momenty rovnaké a všetky spínacie body sú navzájom rovnaké.
Pretože krútiaci moment a prúd asynchrónneho motora s fázovým rotorom sú navzájom prepojené, je možné nastaviť špičkový prúdový limit I1 = (1,5 - 2,5) In a spínací prúd I2 počas zrýchlenia rotora, ktorý by mal poskytnúť spínací moment M2\u003e Mc.
Odpojenie asynchrónnych motorov s fázovým rotorom zo siete je vždy vykonané s krátkym zapnutím obvodu rotora, aby sa zabránilo prepätiu vo fázach navíjania statora, ktoré môžu 3 až 4 krát presiahnuť menovité napätie týchto fáz, ak je okruh rotora v čase vypnutia motora otvorený.
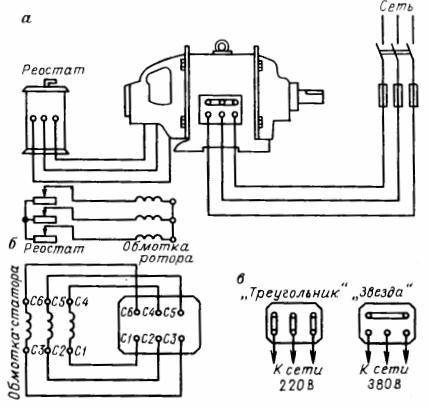
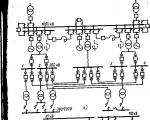
Obr. 3. Schéma zapojenia vinutia motora s fázovým rotorom: a - do siete, b - rotora, c - na svorkovnici.
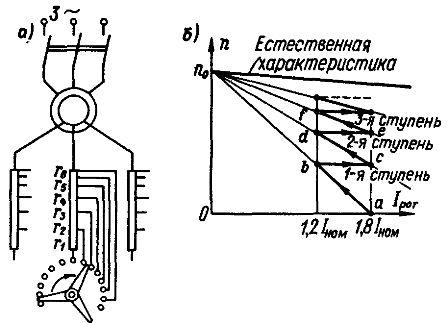
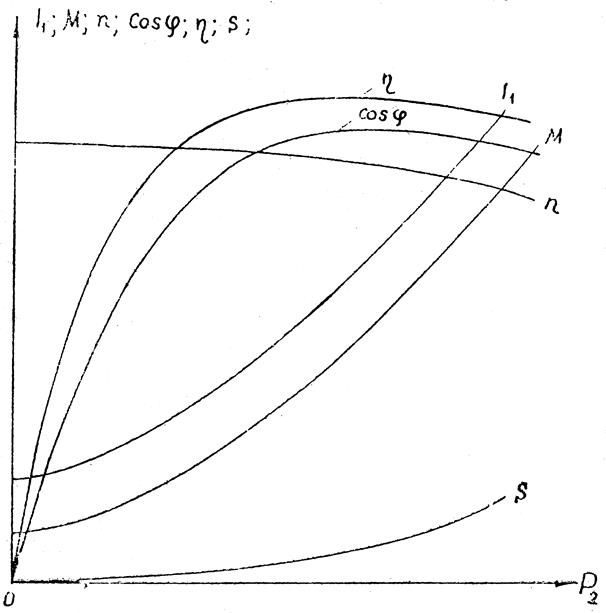
Obr. 4. Spustenie motora s fázovým rotorom: a - spínací obvod, b - mechanické charakteristiky
Ministerstvo školstva a vedy Ruskej federácie
Federálna agentúra pre vzdelávanie
Štátna vzdelávacia inštitúcia
Vyššie odborné vzdelávanie
Národný výskum
IRKUTSKÁ ŠTÁTNA TECHNICKÁ UNIVERZITA
Katedra elektrotechniky a elektrotechniky
Správa o laboratórnej práci №11
disciplína "Všeobecné elektrotechnika a elektronika"
vyhovel
Študent SMO-11-1 ________ Kopytko I.V. 20.10.2012
Docent E & ET ________ Kiryukhin Yu.A. __________
(Podpísané) Priezvisko a. (Date)
Irkutsk 2012
Pracovný cieľ 3
1 Stručné teoretické informácie 3
Elektrické inštalačné zariadenia 7
2 Workflow 7
3 Výpočtová časť 9
4 Pozemky 10
Testovacie otázky 14
Odkazy 17
Účel práce
Zoznámte sa so zariadením a princípom fungovania trojfázového asynchrónneho motora s rotorom vo veveričke a skúmajte vplyv napätia na vlastnosti statora.
1 Stručné teoretické informácie
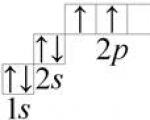
1) Zariadenie, princíp asynchrónneho motora.
Asynchrónny motor je AC stroj. Slovo "asynchrónne" neznamená simultánne. Rozumie sa, že v asynchrónnych motoroch sa frekvencia otáčania magnetického poľa líši od frekvencie otáčania rotora. Hlavnými časťami stroja sú stator a rotor, ktoré sú navzájom oddelené jednotnou vzduchovou medzerou.
Stator je pevnou súčasťou stroja. Jeho jadro sa znížili straty v dôsledku vírivých prúdov sú čerpané z lisovaného plechu elektrotechnickej ocele s hrúbkou 0,35 - 0,5 mm, izolované od seba vrstvou laku. Vinutie je uložené v štrbinách magnetického obvodu statora. Pri trojfázových motoroch je vinutie trojfázové. Fázy vinutia môžu byť pripojené do hviezdy alebo trojuholníka, v závislosti od veľkosti sieťového napätia.
Rotor je rotujúcou časťou motora. Magnetické jadro rotora je valec vyrobený z lisovaných plechov z elektrickej ocele. V drážkach navíjania rotorového stohu. V závislosti od druhu navíjania sú rotory asynchrónnych motorov rozdelené na skratované a fázové (s klznými krúžkami). Skratované vinutie je neizolované medené alebo hliníkové tyče spojené s koncami krúžkov rovnakého materiálu ("veverička").
Na fázovom rotoru v drážkach magnetického obvodu sa nachádza trojfázové vinutie, ktorého fázy sú spojené hviezdou. Voľné konce fáz vinutia sú spojené s tromi medenými kĺzavými krúžkami namontovanými na hriadeli motora. Slipové krúžky sú izolované od seba a od hriadeľa. Na krúžky sú stlačené uhlíkové alebo medené grafitové kefy. Prostredníctvom kĺzavých krúžkov a štetcov v navíjaní rotora môžete zapnúť trojfázový spúšťací a nastavovací reostat.
Premena elektrickej energie na mechanickú energiu v asynchrónnom motore sa uskutočňuje pomocou rotujúceho magnetického poľa. Potrebné podmienky pre budenie rotujúceho magnetického poľa sú:
priestorový posun osí statorovej cievky;
časový posun prúdov v cievkach statora.
Prvá požiadavka je splnená vhodným usporiadaním magnetizačných cievok na magnetickom jadre statora. Fáza osi vinutia je odsadená v priestore pod uhlom 120 °. Druhá podmienka je zabezpečená aplikáciou trojfázového napäťového systému na statorovú cievku.
Ak je motor prepnutý do trojfázovej siete, je nainštalovaný vo vinutí statora súčasný systém rovnaké frekvencie a amplitúdy, ktoré sa pravidelne menia relatívne voči sebe navzájom sa vykonáva s oneskorením o 1/3 periódy.
Prúdové fázy vinutia vytvárajú magnetické pole, ktoré sa vzhľadom na stator otáča frekvenciou otáčok, ktorá sa nazýva frekvencia synchronného otáčania motora:

kde  - frekvencia prúdu, Hz,
- frekvencia prúdu, Hz,
p je počet dvojíc pólov magnetického poľa.
So štandardnou sieťovou frekvenciou  frekvencia otáčania poľa
frekvencia otáčania poľa
|
|
Pri otáčaní sa pole prechádza cez vodiče rotora a vyvoláva emf. Pri zatvorení vinutia rotora spôsobuje EMF pri interakcii s rotujúcim magnetickým poľom rotujúci elektromagnetický moment. Rýchlosť otáčania rotora v režime motora asynchrónneho stroja je vždy nižšia ako rýchlosť otáčania poľa, t.j. rotor zaostáva za rotujúcim poľom. Iba za týchto podmienok je EMF indukovaná v rotorových vodičoch, vytvára sa tok prúdu a točivý moment. Fenomén rotorového oneskorenia z magnetického poľa sa nazýva sklz. Stupeň oneskorenia rotora z magnetického poľa je charakterizovaný veľkosťou relatívneho sklzu:
kde n je rýchlosť rotora, otáčky za minútu
Pre asynchrónne motory sa posuv môže meniť od 1 (štart) až po hodnotu blízku 0 (nečinnosť).
2 ) Spúšťanie asynchrónnych motorov.
Pri štartovaní motora musia byť splnené nasledovné požiadavky:
1. malý štartovací prúd;
2. primeraný rozbehový krútiaci moment;
3. hladké zvýšenie rýchlosti;
4. Jednoduchý a ekonomický štart.
V závislosti od konštrukcie rotora (skratované alebo fázové), výkonu motora, charakteru zaťaženia a rôznych spúšťacích metód.
Pre motory s krátkym rotorom sa používa priamy štart a štart so zníženým napätím.
1. Priamy štart. V tomto prípade je vinutie statora napojené priamo na sieť pri plnom napätí. Priamy štart platí len pre asynchrónne motory so skratovaným rotorom s nízkym a stredným výkonom (do 15-20 kW). Avšak pri výraznom napájaní môže byť táto metóda rozšírená aj na motory s vyšším výkonom (až do približne 50 kW).
2.
Spustenie nízkeho napätia
.
Štartovací prúd motora je úmerný napätiu na fázach navíjania statora  čím sa znižuje napätie spolu so zodpovedajúcim znížením počiatočného prúdu. Avšak táto metóda vedie k zníženiu počiatočného rozbehového momentu, ktorý je úmerný štvorcu napätia na fázach navíjania statora. V dôsledku výrazného zníženia počiatočného krútiaceho momentu je táto spúšťacia metóda uplatniteľná len pri malých zaťaženiach na hriadeli.
čím sa znižuje napätie spolu so zodpovedajúcim znížením počiatočného prúdu. Avšak táto metóda vedie k zníženiu počiatočného rozbehového momentu, ktorý je úmerný štvorcu napätia na fázach navíjania statora. V dôsledku výrazného zníženia počiatočného krútiaceho momentu je táto spúšťacia metóda uplatniteľná len pri malých zaťaženiach na hriadeli.
Existuje niekoľko spôsobov, ako znížiť napätie. v čase spustenia:
a) pri ľahkom štarte asynchrónnych motorov s priemerným výkonom, ktoré bežne pracujú pri pripojení fáz statorového vinutia trojuholníkom, na svorky týchto fáz napájajú redukciu napätia prepnutím na hviezdu;
b) pre akýkoľvek typ pripojenia fáz vinutia statora sa môže napätie znížiť pomocou reaktora (trojfázového indukčného cievku) zapojeného do série v statorovom vinutí. Je menej úsporné znížiť napätie na stator postupným prepínaním rezistorov, pretože súčasne sa stávajú veľmi horúcimi a dochádza k dodatočným stratám elektrickej energie;
c) pri motoroch s vysokým výkonom je vhodné znížiť napätie pomocou trojfázového automatického transformátora. Táto metóda je lepšia ako predchádzajúca, ale oveľa drahšia. Po rotoru motora zrýchľuje a prúd klesá, plné napätie siete sa aplikuje na vinutie statora.
Motor s fázovým rotorom sa spustí zapnutím rozbehového odporu v obvode rotora. Spúšťací reostat znižuje hodnotu počiatočného štartovacieho prúdu a súčasne zvyšuje počiatočný rozbehový krútiaci moment, ktorý môže dosiahnuť hodnoty blízke maximálnemu krútiacemu momentu. Keď motor zrýchľuje, výstupný reostat sa vyvedie.
3) Regulácia rýchlosti a reverzácia indukčného motora.
Regulácia je nútená zmena rýchlosti pri konštantnom zaťažení hriadeľa. Nevýhodou asynchrónnych motorov je slabá schopnosť nastavenia. Niektoré možnosti regulácie sú však k dispozícii.
Z formulára sklzu môžete získať vyjadrenie otáčok rotora indukčného motora:

Z tejto rovnosti vyplýva, že rýchlosť otáčania môže byť zmenená nasledujúcimi spôsobmi: zmenou frekvencie statorového prúdu , počet párov pólov p a sklzu s. Rýchlosť rotora sa dá nastaviť zmenou napájacieho napätia , Zvážte tieto spôsoby.
Regulácia zmenou frekvencie statorového prúdu
.
Frekvenčná regulácia asynchrónnych motorov je najsľubnejšia z dôvodu prítomnosti jednoduchých a spoľahlivých trojfázových tyristorových frekvenčných meničov, ktoré zahŕňajú priemyselnú sieť a asynchrónny motor. Pri nastavovaní frekvencie otáčky motora sa môžu plynule meniť tak, aby ich maximálna hodnota bola desiatky alebo stokrát vyššia ako minimum.
Regulácia zmenou počtu dvojíc pólov p . Prepínanie počtu dvojíc pólov viacotáčkových asynchrónnych motorov poskytuje krokové riadenie rýchlosti rotora a je úsporné. Používa sa v strojoch so špeciálnym dizajnom statorového vinutia, ktorý umožňuje prepínanie svojich cievok na iný počet párov pólov a tiež vtedy, keď sú v štrbinách statorového magnetického obvodu umiestnené viacero striedavo spínaných vinutí, napríklad p = 1 a p = 2 ,
Regulácia napájacieho napätia
.
Zníženie napätia spôsobuje pokles rýchlosti rotora. Znížte stres môžu byť pripojené na reostaty obvodu statoru, autotransformátory alebo nastaviteľné tlmivky. Táto metóda sa používa len pre motory s nízkym výkonom, pretože znižovanie napätia znižuje maximálny krútiaci moment motora, ktorý je úmerný štvorcu napätia. Zníženie maximálneho krútiaceho momentu znižuje stabilitu motora. Okrem toho je rozsah riadenia frekvencie relatívne malý.
Vyššie uvedené kontrolné metódy sa aplikujú na indukčné motory s káčikmi.
Pre motory s fázovým rotorom sa rýchlosť otáčania reguluje zmenou sklzu. Na tento účel je v rotorovom vinutí zahrnutý nastavovací reostat. Pri zvýšení odporu nastavovacieho reostatu sa zväčšuje sklz a rýchlosť otáčania klesá.
Táto metóda poskytuje plynulú zmenu rýchlosti.
Zmena smeru otáčania rotora sa nazýva zvrátenie. Pre reverzáciu je potrebné prepojiť dva vodiče na svorkách navíjania motora statora.
Výskum asynchrónneho motora s fázovým rotorom
Cieľ: oboznámiť sa s konštrukciou asynchrónneho motora s fázovým rotorom. Preskúmajte štart, ovládanie rýchlosti zmenou sklzu, reverzáciou. Odstráňte štartovací diagram, prevádzkové, mechanické a nastavovacie charakteristiky motora.
Všeobecné informácie
Asynchrónny motor s fázovým rotorom (motor s klznými krúžkami), ktorého schéma je znázornená na obr. 1, pozostáva z dvoch častí: pevnej časti - statora a rotujúcej časti - rotora.
Stator (obrázok 2) je rám (teleso) (1), vyrobený zo železného odliatku vo forme valcového odliatku s nožičkami na upevnenie na základ. Do rámčeka je zasunutá taška (2). Ide o dutý valec vyrobený z oddelených, potiahnutý špeciálnym izolačným lakom, tenké plechy z elektrickej ocele s drážkami vyrazenými pozdĺž vnútorného povrchu (3).
V drážkach je uložené trojfázové vinutie statora pozostávajúce z troch rovnakých fázových vinutia, ktoré sa vzájomne otáčajú pozdĺž obvodu statorového obalu v 120 elektrických stupňoch. Začiatok navíjania a konce sú zobrazené na paneli stroja.
Prítomnosť šiestich záverov umožňuje pripojiť statorové vinutia buď podľa schémy "hviezda" alebo "trojuholník". Na svorky je pripojený trojfázový zdroj napájania. Ložiskové štíty sú upevnené na koncoch lôžka, v strede ktorých sú umiestnené guľkové ložiská hriadeľa rotora.
Rotor (obrázok 3) je valec lisovaný na hriadeli (rotorový obal) (1), zostavený z oddelených tenkých plechov z elektrickej ocele potiahnutých špeciálnym izolačným lakom s drážkami vylisovanými pozdĺž vonkajšieho povrchu (2). V drážkach položené trojfázové navíjanie rotora ![]() vyrobené ako statorové vinutie a pripojené podľa schémy "hviezda".
vyrobené ako statorové vinutie a pripojené podľa schémy "hviezda".
Začiatok fáz vinutia, vyberaný vo vnútri dutého hriadeľa a pripevnený k kontaktným krúžkom (3). Na kruhoch umiestnených medených grafitových kefiek (4), pripojených na svorky, na štít rotora.

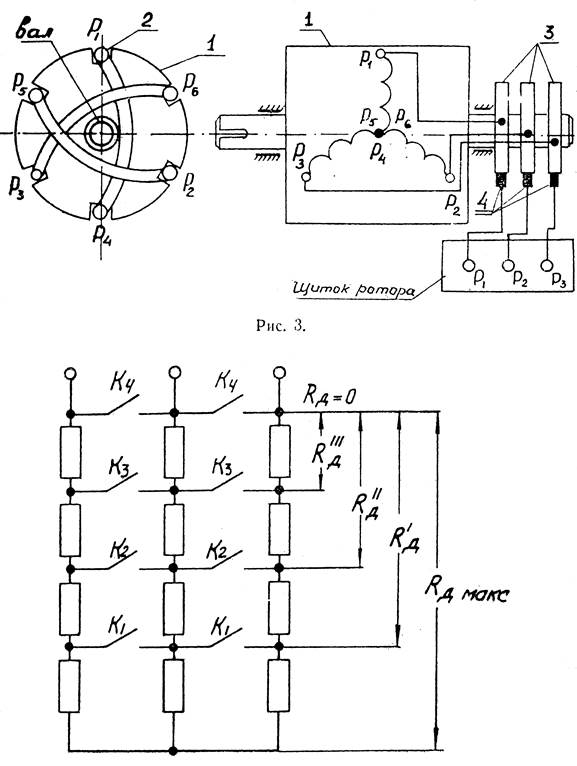
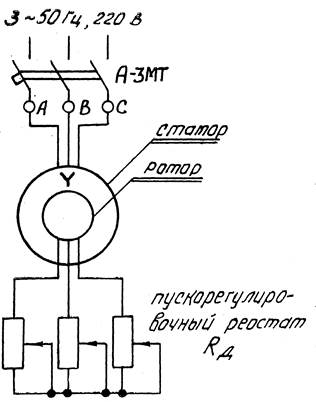
Terminály ,, sa používajú na pripojenie na vinuté trojfázové rezistory trojfázového rozbehu (obr.4), ktoré pozostávajú z troch, rozdelených na rezy, rovnakého činného odporu, pripojeného podľa schémy "hviezda". Hodnotu možno znížiť o kroky (,,,, = 0), zatváranie kontaktov ,,, postupným pohybom rukoväte (ručným kolesom) reostatu z polohy do polohy 3, 2, 1, = 0.
Princíp činnosti asynchrónneho motora s fázovým rotorom
Prúd, ktorý preteká vinutiemi statora pôsobením trojfázového napätia pôsobiaceho na svorky, vytvára rotačný magnetický tok vnútri statora. Frekvencia otáčania tohto prúdu vzhľadom na stator sa určuje podľa vzorca:
kde - frekvencia trojfázovej siete, Hz,
p je počet dvojíc pólov statorového vinutia,
- frekvencia otáčania magnetického toku, otáčky za minútu.
Smer otáčania toku je určený poradím otáčania fáz statora. Zmena sekvencie fáz obráti magnetický tok. Ak chcete zmeniť postupnosť fáz, stačí nahradiť akékoľvek dva z troch vodičov, ktoré pripájajú stator do siete. Veľkosť rotujúceho magnetického toku, ktorý je súčtom troch sínusoidných magnetických tokov vinutia statorovej fázy, sa časom nemení a je určený vzorcom:
kde ─ je amplitúda sínusoidného meniaceho sa magnetického toku vinutia statorovej fázy.
Hodnota je priamo úmerná napätiu aplikovanému na svorkách statora pri U = const tiež konštantná. Počas otáčania magnetický tok s jeho elektrickými vedeniami pretína vodiče vinutia rotora a indukuje v ňom trojfázový EMF. Vzhľadom na to, že je vinutie rotora uzavreté (na jednej strane spoločný bod rotorových vinutia spojený s hviezdou, na druhej strane spoločný bod odporu reostatu pripojeného v hviezde), cez ňu prúdi trifázový prúd rotora, ktorý vytvára rotujúci tok rotora.
Toky sa otáčajú synchrónne a vytvárajú celkový rotačný tok motora F. Celkový magnetický tok, spojený so statorovým vinutím a vinutím rotora, indukuje v nich elektromotorické sily. Toto je analógia asynchrónneho motora s transformátorom.
V dôsledku interakcie rotorových prúdov s tokom F mechanické sily pôsobiace na vinuté vodiče rotora vytvárajú rotačný elektromagnetický moment M. Ak je krútiaci moment M väčší než statický brzdný moment na hriadeli, rotor motora sa bude otáčať v smere otáčania poľa s frekvenciou otáčania< . Относительную разность частот вращения поля и ротора называют скольжением.
Rýchlosť rotora vyjadrená sklzom bude
![]() .
.
Pri štartovaní motora = 0 a s = 1. Ak sa rotor otáča synchronne so statorovým poľom (=), potom bude posúvanie nula (s = 0). Keď je magnetické pole statora stacionárne voči rotoru a prúdy v rotoru nebudú indukované, teda M = 0. Preto motor nemôže dosiahnuť túto rýchlosť, a preto názov ─ asynchrónny (nie sú súčasne).
Energetická tabuľka
Premena energie v asynchrónnom motore, ako aj v iných elektrických strojoch je sprevádzaná stratou. Tieto straty, ktoré možno rozdeliť do troch typov: elektrických, magnetických a mechanických, a celý proces prevodu energie je jasne znázornený v energetickom diagrame (obrázok 5).
Napájanie dodávané do motora zo siete:
⋅ ⋅ cos, W,
kde je napätie aplikované na fázu navíjania statora V;
- prúd vo fáze vinutia statora, A;
cos je výkonový faktor motora.

Elektrická energia dodávaná do statora je v statoru čiastočne stratená kvôli stratám vírivého prúdu a hysteréze v oceli () a stratám v navíjacích vodičoch ()
kde je aktívny odpor fázy navíjania statora;
- počet fáz vinutia statora (pre trojfázový motor = 3).
Zvyšná sila cez magnetický tok sa prenáša na rotor a preto sa nazýva elektromagnetický výkon ()
- (+) W.
Časť elektromagnetického výkonu je vynaložená na pokrytie elektrických strát v rotorovom vinutí, je úmerná sklzu
Zvyšok elektromagnetického výkonu je prevedený na mechanický výkon motora, nazývaný celkový mechanický výkon.
Mechanická energia na hriadeli motora W je menšia ako celková mechanická energia o množstvo mechanických a dodatočných strát.
Účinnosť motora
Výkon motora
Rovnako ako akýkoľvek iný elektromotor sa asynchrónny motor s rotorom s fázovým vinutím vyhodnocuje na základe množstva štartovacích, prevádzkových a nastavovacích charakteristík. Spustenie motora a jeho zrýchlenie na minimálnu rýchlosť otáčania možno sledovať zmenou mechanických charakteristík a nárazových prúdov v závislosti od hodnoty pridaného aktívneho odporu zavedeného do okruhu rotora.
Mechanickou charakteristikou je závislosť otáčok na krútiacom momente na hriadeli s konštantným aktívnym odporom v obvode rotora, t.j.
= f (M) at = const.
Skupina mechanických vlastností asynchrónneho motora s fázovým rotorom je znázornená na obr. 6.
| |
| |
| |
Typ mechanickej charakteristiky určuje správanie pohonu.
v prechodných režimoch štartovania, brzdenia, zmeny rýchlosti otáčania, čo výrazne ovplyvňuje výkonnosť mechanizmu, ako aj jeho spoľahlivosť za prevádzkových podmienok. Mechanické charakteristiky motora s aktívnym odporom zavedeným do obvodu rotora sa nazývajú umelé; každá hodnota zodpovedá vlastnej umelému mechanickému charakteru. Mechanická charakteristika pri absencii prídavného odporu v obvode rotora (= 0) sa nazýva prirodzená. Prírodné a umelé mechanické charakteristiky pretínajú v spoločnom bode osi súradníc - rýchlosť otáčania rotujúceho magnetického poľa statora. Prevádzka motora na prírodných mechanických vlastnostiach najúspornejších. Prirodzená mechanická charakteristika je najtvrdšia, t.j. pri zmene záťaže sa mierne menia otáčky motora. Pri práci na prírodných mechanických charakteristikách má však malý rozbehový krútiaci moment = (0,7 ÷ 1,8) a veľký rozbehový prúd
= (5,5 ÷ 7,0)
Odolnosť zavedená do okruhu rotora znižuje prúd v momente štartu a súčasne zvyšuje počiatočný krútiaci moment, t.j. zlepšuje charakteristiky štartovania motora. Preto je začiatok indukčného motora s fázovým rotorom vykonávaný na umelých mechanických charakteristikách (sekcie ab, cd, ef, gh štartovacieho diagramu).
Prechod z jednej umelého charakteru na druhú nastane po odstránení ďalšej časti rezistencie.
Bod "k" diagramu zodpovedá štartu motora prirodzenej mechanickej charakteristike.
Odolnosť zavedená do každej fázy vinutia rotora pred štartom sa zvolí tak, že počiatočný moment sa rovná kritickému momentu, t.j. =.
Ako je známe, maximálny moment sa uskutočňuje pri kritickom sklzu, ktorý je určený vzorcom:
kde je aktívny odpor fázy vinutia rotora, Ohm;
- indukčný odpor fázy vinutia stacionárneho rotora, Ohm.
Na dosiahnutie maximálneho rozbehového momentu musí byť splnená podmienka
![]() = 1
= 1
Počet krokov odporu sa volí v súlade s požiadavkami hladkého štartu.
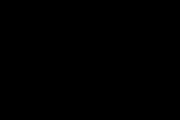
Výkon asynchrónneho motora s fázovým rotorom je závislosť rýchlosti otáčania n, krútiaceho momentu M, spotrebovaného prúdu, účinníka faktora, účinnosti η na výkon šachty at = const a f 1 = const, t.j.
M, sos, η = f (
Výkon sa posudzuje na základe základných vlastností motora. Najmä môžu byť postavené mechanické charakteristiky
n = f (M). Výkon motora s nízkym výkonom je možné odstrániť priamym zaťažením elektromagnetickou brzdou. Pri motoroch stredných a vysokých výkonov je výkon určený koláčovým grafom. Príklad výkonnostných charakteristík asynchrónneho motora je znázornený na obr. 7.
Regulácia charakteristická pre asynchrónny motor s fázovým rotorom = f () predstavuje závislosť otáčok motora pri konštantnom krútiacom momente na hriadeli na úrovni aktívneho odporu. Zavedením odporu do obvodu rotora motora sa otáčky otáčok môžu nastaviť smerom nadol od menovitého. Rozsah regulácie bude širší, čím silnejší je motor. Regulácia rýchlosti sa vykonáva prepnutím motora do práce od prirodzených charakteristík až po mäkké umelé vlastnosti. Táto metóda riadenia rýchlosti nie je ekonomická, pretože vysoké straty energie v odolnosti. Na obr. 6 znázorňuje rozsah možnej regulácie otáčok pri menovitom zaťažení.
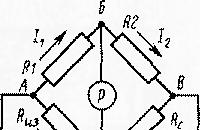
Elektromagnetická brzda
Zaťaženie skúmaného asynchrónneho motora sa uskutočňuje pomocou elektromagnetickej brzdy ET (obrázok 8) pozostávajúcej z magnetického systému a oceľového kotúča. Magnetický systém obsahuje magnetické jadro a navíjanie OBT (brzdenie vinutia brzdy). Disk je na rovnakom hriadeli s elektromotorom a je poháňaný posledným otočením.
Princíp brzdy je založený na vytvorení brzdiaceho momentu z interakcie vírivých prúdov oceľového disku s magnetickým tokom navíjania OVT, ktorý je vyvolaný jednosmerným prúdom.
Magnetický systém sa môže otáčať vzhľadom na hriadeľ disku a jeho uhol natočenia závisí od momentu zaťaženia motora. Brzdová stupnica, kalibrovaná v jednotkách krútiaceho momentu, umožňuje motoru čítať zaťaženie v Nm.
Poradie práce
POZOR!
Pri vykonávaní práce dodržiavajte bezpečnostné pokyny uvedené v pokynoch na pracovisku!
NEPORUŠUJTE SYSTÉM, KTORÝ NEVYKONÁVA LEKÁR Triedy !!!
1. Zoznámiť sa s vybavením a zariadeniami zariadenia na štúdium motora.
a) Kryt svorkovnice indukčného motora s fázovým rotorom typu MKA-13 sa oboznámte s umiestnením statorových navíjacích svoriek: ![]() a svorky navíjania rotora ,,.
a svorky navíjania rotora ,,.
b) elektromagnetická brzda "ET" umiestnená na rovnakom hriadeli s motorom a brzdný rezistor.
c) trojfázový predradník;
g) meracie prístroje: ampérmetr, voltmetr, wattmetr;
e) snímač a indikátor elektrického otáčkomera;
e) svorky A, B, C na laboratórnom paneli a stroji A4;
g) terminály (+), (-) 110 V na laboratórnom paneli a automatický stroj A2.
2. Zoznámiť sa s technickými charakteristikami motora na cestovnom pasu.
V správe uveďte základné údaje (typ, výkon, napätie, prúd, frekvencia, rýchlosť rotora, účinnosť, účinník, E.D.S. a rotorový prúd).
3. Zoznámte sa s elektrickým otáčkomerom.
Indikátor elektrického otáčkomeru má dve šípky: menšia ruka ukazuje tisíce otáčok za minútu, veľká ruka ukazuje stovky zákrut.
4. Zostavte schému pre štúdium motora (obrázok 8).
5. Zaznamenajte hlavné technické údaje meracích prístrojov v tabuľke 1.
Tabuľka 1
6. Pripravte motor na štart:
6.1. Rukoväť odporových bŕzd sa umiestni do polohy "vypnuté".
6.2. Motor reostatu umiestnený v polohe.
7. Dajte schéme kontrolu vedúceho triedy.
8. Po kontrole okruhu vedúcim dozorov a ZÍSKANÍ POVOLENIA POVOLENIA zapnite automatiku A2 a nastavte prúd na reostat = 0,7 A.
9. Odstráňte údaje pre vytvorenie grafu spustenia.
9.1. Zapnite zariadenie A4.
9.2. Zmerajte náraz lineárneho prúdu, keď sa rukoväť presunie z polohy "vypnuté" do polohy, t. at = 0.
9.3. Po čakaní na ustálený chod motora v tejto fáze (ihly tachometra sa zastaví v pohybe) zmerajte maximálnu hodnotu otáčok a zodpovedajúcu minimálnu hodnotu lineárneho prúdu. Výsledok sa zaznamená v prvom riadku tabuľky 2 (1. etapa).
9.4. Vykonajte podobné merania v ostatných štartovacích fázach (keď sa rukoväť reostatu pohybuje z polohy "" do polohy 3, z polohy 3 do polohy 2 atď.). Meracie údaje zaznamenané v tabuľke 2.
Minimálna hodnota frekvencie otáčania tejto fázy sa rovná jej maximálnej hodnote v predchádzajúcom štádiu, t.j. prechod motora z jednej charakteristiky na druhú nastáva, keď n = const.
10. Motor vypnite postupne.
Ako viete, elektrické napätie by malo mať svoje vlastné opatrenie, ktoré na začiatku zodpovedá hodnote, ktorá ...

Uhlie je prvé fosílne palivo, ktoré človek začal používať. V súčasnosti ako nosič energie ...

Tepelné relé sú elektrické zariadenia, ktorých hlavným účelom je chrániť motor pred nadmerným ...

Pracovný plán: Úvod Štruktúra atómu uhlíka, šírenie v prírode, výroba uhlíka, fyzikálne a chemické ...
Elektrické množstvo, ktoré charakterizuje vlastnosť materiálu na zabránenie toku elektrického prúdu. V ...
Ampere zákon je jedným z najdôležitejších a najužitočnejších zákonov v elektrotechnike, bez ktorého vedecké a technické ...
Technologická schéma jadrovej elektrárne závisí od typu reaktora, typu chladiva a moderátora, ako aj od množstva ďalších ...

Zvyčajne sa záporné desatinné čísla automaticky konvertujú na obrátené alebo ...
Informatics and ICT Grade 8 Workbook Bosova LL 2012 Odpovede, Informatics a ICT Grade 8 Workbook ...

Light / Elektromery a meranieSeptember 1 Mosenergosbyt vyžaduje prenos dát každý mesiac ...
S príchodom technických prostriedkov na ukladanie a prenos informácií sa objavili nové myšlienky a techniky kódovania ...
C (karbón), nekovový chemický prvok skupiny IVA (C, Si, Ge, Sn, Pb) periodického systému ...

Vyčerpanie uhľovodíkových palív, degradácia životného prostredia a rad ďalších dôvodov skôr alebo neskôr ...
Najprv sa zamyslite nad základnou a všeobecnou otázkou pre skúmané problémy: zistite, na čom závisí ...

Antracit (grécka anthrax - uhlie), tuhé, vysokohustotné, lesklé uhlie obsahujúce viac ako 90% uhlíkových ...
Elektrické zariadenia sa pravidelne podrobujú skúškam, ktoré sledujú ciele kontroly súladu ...