Synopsa hry na hranie rolí „Hra na sladké kaviarne: „Vezmi si hudobnú stoličku“
Svetlana Furshtakova Synopsa hry na hranie rolí v strednej skupine "Kaviareň" 1. Úlohy: 1. Pokračovať v oboznamovaní detí s ...
Hlavnou úlohou elektroenergetiky je nepretržité, udržateľné poskytovanie spotrebiteľa elektrická energia. Je potrebné určiť, za akých podmienok je možné zabezpečiť stabilnú prevádzku generátorov, aké množstvo výkonu je možné prenášať elektrickým vedením, od akých faktorov závisí stabilita, prečo stabilná, paralelná prevádzka synchrónnych generátorov, ktoré sú v normálna prevádzka je narušená. Pozrime sa na tieto otázky.
Obr. 7. Najjednoduchšia schéma elektrického systému
Pre predstavenú schému prenosu energie v predchádzajúcej časti sa získal výraz pre elektrickú energiu v závislosti od uhla medzi vektormi emf. Eq a napätie prijímacích pneumatík U, ktoré sa nazýva uhlová charakteristika:
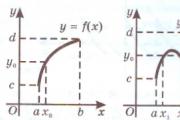
Pre dané hodnoty Eq, U, Xd je výkon generátora funkciou uhla a táto závislosť je nelineárna - sínusová. Pre úplnosť, výkonová charakteristika turbíny PT je nakreslená na rovnakom grafe a keďže nezávisí od uhla, je znázornená priamkou.

Ryža. osem.
Výkonová bilancia na hriadeli generátora, t.j. synchrónna prevádzka je zabezpečená, keď Pg=PT, t.j. keď sa rotačný mechanický výkon (krútiaci moment) turbíny rovná brzdnému elektromagnetickému výkonu (krútiacemu momentu) generátora. Toto tvrdenie vyplýva aj z diferenciálnej rovnice pre relatívny pohyb rotora synchrónneho stroja, uvažovanej v predchádzajúcej prednáške

pri Pg=PT,=cons. (21)
Ako je zrejmé z grafu na obr. 8, podmienka PG = PT je splnená v dvoch bodoch 1 a 2, ktoré zodpovedajú uhlom 1 a 2 . Je potrebné určiť, v ktorom z týchto bodov bude generátor pracovať stabilne.
Predpokladajme, že v dôsledku nejakého vplyvu sa uhol v bode 1 odchýli o malú hodnotu. V tomto prípade sa elektromagnetický výkon generátora a výkon prenášaný po silovom vedení zvýšil o hodnotu P1, pričom mechanický výkon turbíny sa zotrvačnosťou nezmenil. Bola porušená podmienka rovnováhy výkonov (momentov) na hriadeli, keďže (Pg1 + P1)>PT a na hriadeli prevláda brzdný moment, pod vplyvom ktorého dochádza k brzdeniu rotora generátora. V dôsledku toho sa uhol začne zmenšovať a 0 a rotor sa vráti do bodu 1, kde je zabezpečená rovnováha momentov. Podobný proces - návrat do bodu 1 nastáva, ak sa uhol v tomto bode zmenší o.
Ak dôjde k rovnakému zvýšeniu uhla o hodnotu v bode 2, potom sa nadmerný moment, ktorý nastane na hriadeli, zrýchli, pretože (Pg2 - P2) Preto z dvoch bodov 1 a 2 je režim v bode 1 stabilný, pretože rotor sa vracia do východiskového bodu s malými odchýlkami. Preto znak udržateľnosti synchrónny generátor je návrat do pôvodného režimu. Je potrebné mať na pamäti, že obnovenie pôvodného režimu alebo jeho blízkosti je hlavným ukazovateľom stabilnej prevádzky synchrónneho generátora, a teda aj elektrického systému. So zvyšovaním výkonu turbíny a podľa toho aj výkonu prenášaného pozdĺž čiary podľa grafu sa zvyšuje aj hodnota uhla a blíži sa k bodu 3. Tento bod na jednej strane ukazuje maximálny činný výkon generátora, ktorý je možné prenášať pri m=900: kde Pm= - maximálny výkon. Na druhej strane je bod hranicou oddeľujúcou stabilné a nestabilné oblasti generátora. Je potrebné mať na pamäti, že limity pre zmenu uhla: 0900 je zóna stabilnej prevádzky synchrónneho generátora; -> 900 oblastí nestabilnej prevádzky synchrónneho generátora. Maximálny výkon Pm= sa nazýva ideálna statická hranica prenášaného výkonu zodpovedajúca konštantnému napätiu U, čo nie vždy platí. V praktických výpočtoch, aby sa kvantifikovala hladina statická stabilita(stabilita pri malých odchýlkach) zaviesť pojem súčiniteľ bezpečnosti statickej stability, určený vzťahmi: Hodnota Kc je stanovená v medziach minimálne: 20 % v normálnych režimoch, 8 % v pohavarijných režimoch. Zistilo sa, že stabilná prevádzka synchrónneho generátora je zabezpečená, ak sa znamienka prírastkov uhla a výkonu P= PT ± Pg zhodujú. Potom pre odchýlky môžeme napísať: alebo prechodom na derivát: , pretože PT=post. Statická stabilita bude teda zabezpečená pri stave Táto podmienka je matematickým kritériom pre statickú stabilitu synchrónneho stroja. Problém a podstata stability pri malých poruchách sa redukuje na prijatie opatrení, ktorými bude táto podmienka splnená. O nich sa bude diskutovať ďalej. Je potrebné ešte raz poznamenať, že možnosť prenosu aktívneho výkonu pozdĺž elektrického vedenia je spojená práve s prítomnosťou uhla posunu medzi vektormi emf. Eq a napätia prijímacieho systému U, inými slovami, uhol posunu medzi napäťovými vektormi na koncoch prenosu. Zmena prívodu nosiča energie (pary alebo vody) do turbín vysielacej stanice a ich mechanického výkonu sa tak prejaví v elektrický režim prevod zmenou uhla, čo je hodnota, ktorá charakterizuje ako stabilitu prevodu, tak aj jeho obmedzujúci režim. Opatrenia na zabezpečenie hranice statickej stability elektrického systému Aby sa predišlo narušeniu statickej stability elektrického systému, musia byť splnené nasledujúce podmienky: Maximálny výkon prenášaný elektrickými vedeniami by nemal prekročiť maximálne prípustné hodnoty, čo sa rovná nastaveniu maximálnych uhlov posunu rotorov generátora; Úroveň stresu, najmä v uzloch zaťaženia, by nemala klesnúť pod prípustnú úroveň. Tieto podmienky sú zabezpečené tak pri prevádzke elektrizačnej sústavy, ako aj pri jej návrhu s výberom vhodných zariadení, keďže ich parametre je potrebné voliť na základe týchto požiadaviek. Hodnota rezervy statickej stability vzhľadom na uvedené podmienky má značný praktický význam a jej zabezpečenie a zvýšenie závisí od mnohých faktorov. Uvažujme o najdôležitejších z nich. Uvedieme jednoduchú schému elektrického systému Obr. 9 Najjednoduchšia schéma elektrického systému.
Obrázok 10. Schéma ekvivalentu elektrického systému
Výkon prenášaný z generátora je určený výrazom: Ak sa neberú do úvahy aktívne odpory prvkov elektrickej siete(ri=0) tento vzorec je zjednodušený Zo štruktúry vzorca je zrejmé, že ovplyvňovaním alebo zmenou hodnôt zahrnutých v Pm je možné zvýšiť maximálnu charakteristiku alebo, čo je to isté, zvýšiť maximálny prenášaný výkon a tým zvýšiť hranicu statickej stability. , určený vzťahom: Zvážme ich oddelene a určme možnosti ich zmeny. Začnime s indukčnými reaktanciami. odpor. Odpor transformátorov a ich zmena sú spojené s dizajnové prvky zariadenie, preto je počas prevádzky pracovný transformátor vo výpočtoch statickej stability reprezentovaný daným odporom určeným menovitými údajmi: výkon, skratové napätie stupňov atď. Odpor elektrických vedení zahrnutých vo vzorci sa môže zmeniť v prípade odpojenia jedného z obvodov, častí a sekcií. Pretože Xl je zahrnuté v menovateli výkonového vyjadrenia, mení sa maximum uhlovej charakteristiky: keď je jeden z obvodov vypnutý, jeho hodnota klesá z Pm1 na Pm2 a hodnota uhla zodpovedajúca normálnemu režimu sa zvýši z 1 na 2. Na zvýšenie Pm sa pridá nový okruh. Obrázok 11. Treba poznamenať, že zvýšenie počtu paralelných obvodov elektrického vedenia s cieľom zvýšiť maximálny prenosný výkon a rezervu statickej stability je nákladná záležitosť. Preto v dlhých vedeniach využívajú (okrem prechodu na vyššiu napäťovú triedu) štiepenie fázových vodičov elektrických vedení. Ako viete, špecifický indukčný odpor vedenia, vztiahnutý na 1 km, je určený: kde Dav je geometrická stredná vzdialenosť medzi vodičmi fáz, re je ekvivalentný polomer. Zníženie indukčného odporu vedenia pri rozdeľovaní fázových vodičov sa vysvetľuje prerozdelením magnetických polí vodičov: polia medzi rozdelenými vodičmi sú oslabené a vytlačené smerom von, ako keby sa zväčšoval prierez vodiča v bode. rovnaká spotreba kovu. Treba poznamenať, že každý ďalší drôt, keď je rozdelený, poskytuje čoraz menší dodatočný efekt. Napríklad s dvoma drôtmi vo fáze sa indukčná reaktancia zníži o 19%, s tromi - o 28%, so štyrmi - o 32% atď. Hodnoty špecifickej indukčnej reaktancie pri delení sa pohybujú od 0,410,42 ohm/km do 0,26 0,29 ohm/km. Fázový vodič je rozdelený na dva, tri, štyri alebo viac paralelne zapojených vodičov. Napríklad pri sieťovom napätí 330 kV - 2 vodiče vo fáze, 500 kV - 3 vodiče, 750 kV - 5 vodičov a 1150 kV - 8 vodičov vo fáze. Preto takéto opatrenie vedie k zvýšeniu maximálneho prenášaného výkonu bez zvýšenia spotreby materiálu drôtu, keďže jeho celkový prierez sa nezväčšuje. Zohľadnenie zaťaženia s konštantným odporom zvyšuje celkový odpor a tým znižuje maximálnu charakteristiku. Synchrónny generátor má najväčší indukčný odpor. Existuje určitý vzťah medzi hodnotami parametrov stroja a ich nákladmi, pretože indukčné odpory sú určené hodnotami elektromagnetického zaťaženia. Znižovanie indukčných reaktancií synchrónneho generátora, najmä Xd, je mimoriadne náročný a nákladný spôsob spojený so zväčšením rozmerov stroja a znížením účinnosti. Zvážme túto otázku podrobnejšie. Ako je známe, hodnoty synchrónnych indukčných reaktancií sú nepriamo úmerné veľkosti vzduchovej medzery stroja. kde je vzduchová medzera. Súčasne je Xd tiež nepriamo úmerné budiacemu prúdu Z týchto vzťahov je zrejmé, že na zníženie synchrónneho indukčného odporu je potrebné zvýšiť vzduchovú medzeru a budiaci prúd, čo je potrebné na vytvorenie dodatočného magnetického toku, ktorý poskytuje zvýšené energetické procesy. Následne je v tomto prípade potrebné zvýšiť budiaci výkon, posilniť budiace vinutie a ďalšie vinutia, čo je spojené so zvýšením spotreby materiálu. Vzhľadom na náročnosť umiestnenia budiaceho vinutia to povedie k zväčšeniu rozmerov generátora. Preto vo všeobecnosti zníženie Xd a Xq povedie k zvýšeniu nákladov na stroj. Zníženie prechodových indukčností Xd", Xq" synchrónneho generátora je možné zvýšením prúdovej hustoty vo vinutí, čo vedie k zvýšeniu strát, zníženiu účinnosti, zvýšeniu hmotnosti generátora a tým k zvýšeniu náklady na generátor. Uvedené problémy sú obzvlášť dôležité pri vytváraní moderných, veľmi používaných synchrónnych generátorov s kapacitou 200-1200 MW. Efektívnejšie je použitie ARV liekov rôzne druhy, pomocou ktorej v podstate prebieha kompenzácia synchrónnych a prechodových indukčností generátorov. Zmena E.m.f generátora (v tomto prípade Eq) vedie k zmene dvoch najdôležitejšie parametre: jeho účinník a napätie na prípojnici stroja. Moderné veľmi používané synchrónne generátory sa vyrábajú s vysokým menovitým účinníkom cos = 0,9-1. Zvýšenie menovitého účinníka pre daný činný výkon vedie k zníženiu menovitého výkonu jalový výkon, rozmery a náklady na generátor, pretože to znižuje celkový výkon stroja () a v dôsledku toho bude nižšia spotreba aktívneho a konštrukčného materiálu. Na druhej strane zvýšenie cos vedie k zníženiu emf. Eq, čo znižuje hranicu statickej stability. Navyše, ekonomicky optimálna prenosová dĺžka jalového výkonu generovaného generátorom je obmedzená vzdialenosťou (25-70) km. Jalový výkon potrebný pre záťaž musí byť generovaný v mieste spotreby. Zmena napätia generátora závisí od jeho zaťaženia a na jeho udržanie na požadovanej úrovni, napríklad nominálnej, v širokom rozsahu zmien zaťaženia je potrebná zmena emf. generátora zmenou jeho budiaceho prúdu. Tento problém úspešne riešia rôzne typy RIA, v podstate kompenzujúce vnútorný odpor generátor. Napríklad v prítomnosti ARV-s môže byť vnútorný odpor synchrónneho generátora voči prípojniciam štartovacieho konca vrátane odporu transformátora XT1 kompenzovaný vhodnou reguláciou budenia generátora, zabezpečujúc napätie UГ= konšt. Maximálnu uhlovú charakteristiku v tomto prípade možno určiť zo vzťahu Pre porovnanie sú uvedené uhlové charakteristiky pre rôzne typy ARV (obr. 12) Obrázok 12 Ako je možné vidieť zo vzorca činného výkonu (28), jeho hodnota je určená súčinom emf. napätie alternátora a systému alebo viac všeobecný pohľad závisí od druhej mocniny napätia. Preto v prvej aproximácii môžeme predpokladať, že dvojnásobné zvýšenie sieťového napätia je ekvivalentné štvornásobnému zvýšeniu počtu prenosových obvodov. Z toho vyplýva, že zvýšenie prenosového napätia na zvýšenie maximálneho prenosového výkonu je ekonomickejšie ako zvýšenie počtu prenosových obvodov. Pozdĺžna a priečna kompenzácia parametrov elektrického vedenia sú tiež opatreniami na zvýšenie maximálneho prenosného výkonu a zvýšenie rozpätia statickej stability. Pozdĺžna kompenzácia znamená sériové zapojenie kondenzátorov do vedenia, pri ktorom hodnota odporu klesá z Xl na (Chl-Xs), kde Xs - kapacita kondenzátor. Toto opatrenie je obzvlášť účinné pre dlhé prenosové vedenia. Krížová kompenzácia je synchrónny kompenzátor pripojený k prenosovému vedeniu cez transformátor. Udržiavaním napätia v mieste pripojenia SC v podstate znižuje dĺžku vedenia a tým aj jeho odpor. V súčasnosti sa používajú veľmi účinné, vysokorýchlostné zdroje statického jalového výkonu (SRPS) s dobou odozvy (0,02 h 0,06) s. Tieto zariadenia majú nastaviteľný reaktor a neregulovaný kondenzátor, ako aj riadiaci systém. Okrem zvyšovania výkonu plnia širokú škálu úloh, uskutočňujú fázovú reguláciu parametrov režimu, potláčajú prepätia, regulujú napätia v širokom rozsahu a zvyšujú hranicu statickej a dynamickej stability. Do rodiny kompenzátorov patria aj nastaviteľné a neregulované tlmivky, ktoré kompenzujú kapacitu elektrických vedení a udržujú napätie v mieste pripojenia vďaka nelineárnej saturačnej charakteristike aktívnej zóny. Je potrebné ešte raz pripomenúť, že kritériom pre statickú stabilitu synchrónneho generátora je stav a pri maximálnom prenášanom výkone Pm sa synchronizačný výkon rovná nule. Preto je v praktických podmienkach nemožné prenášať túto silu, pretože najmenšie stlačenie záťaže v EPS spôsobí, že generátor vypadne zo synchronizácie, preto musí byť normálny prenášaný výkon P0 menší ako Pmax. A jeho hodnota bude určená na základe bezpečnostného faktora statickej stability systému. Z vyššie uvedeného možno vyvodiť nasledovné: Ideálny limit vysielacieho výkonu je maximálny výkon prenášaný do systému za predpokladu konštantného napätia na prijímacích koncových zberniciach. Kritériom pre statickú stabilitu najjednoduchšieho systému je kladnosť derivácie prenášaného výkonu vzhľadom na uhol medzi emf generátorov a napätím prijímacieho konca prenosu. Faktor statickej stability ukazuje, o koľko je možné zvýšiť prenášaný výkon zo stanice do siete, aby sa predišlo narušeniu stability elektrizačnej sústavy. 4. Moderné automatické regulátory budenia (ARV-s, ARV-p) dokážu vďaka efektívnej regulácii budiacej sústavy v závislosti od parametrov elektrizačnej sústavy kompenzovať indukčné odpory prvkov vrátane indukčných odporov synchrónneho generátora. režim. Po vyhodnotení všetkých vyššie uvedených opatrení na zvýšenie limitu statického výkonu môžeme konštatovať, že najhospodárnejšie sú opatrenia zamerané na udržanie konštantného napätia na svorkách generátorov a na záťažových zberniciach. Použitie rôznych typov AVR na generátoroch a moderných vysokorýchlostných statických zdrojoch jalového výkonu je prakticky najracionálnejším a najekonomickejším opatrením na zvýšenie hraníc prenášaného výkonu a hranice statickej stability, a to ako pre samostatný prenos, tak aj pre elektrický systém ako celok. Ustálená prevádzka elektrizačnej sústavy je kvázi ustálená, pretože sa vyznačuje malými zmenami v tokoch činného a jalového výkonu, napätiach a frekvenciách. V systéme napájania sa teda jeden ustálený prevádzkový stav neustále presúva do iného ustáleného prevádzkového stavu. Malé zmeny v režime prevádzky energetického systému nastávajú v dôsledku zvýšenia alebo zníženia spotreby spotrebiteľských elektrických inštalácií. Malé poruchy spôsobujú, že systém reaguje vo forme oscilácií v rýchlosti otáčania rotorov generátora, ktoré môžu byť rastúce alebo tlmiace, oscilačné alebo aperiodické. Charakter výsledných kmitov určuje statickú stabilitu daného systému. Statická stabilita sa kontroluje pri pokročilom a detailnom projektovaní, vývoji špeciálnych automatických riadiacich zariadení (výpočty a experimenty), uvádzaní nových prvkov systému do prevádzky, zmenách prevádzkových podmienok (spájanie systémov, spúšťanie nových elektrární, medzistaníc, elektrických vedení). Pojem statická stabilita je chápaný schopnosť elektrizačnej sústavy obnoviť pôvodný alebo blízky pôvodnému režimu prevádzky elektrizačnej sústavy po malej poruche alebo pomalých zmenách parametrov režimu. Statická stabilita je nevyhnutnou podmienkou pre existenciu ustálenej prevádzky systému, ale nepredurčuje schopnosť systému pokračovať v prevádzke v prípade konečných porúch, napr. skraty, zapínanie alebo vypínanie elektrického vedenia. Existujú dva typy porušení statickej stability: aperiodické (plazivé) a oscilačné (samokývavé). Statická aperiodická (creepová) stabilita je spojená so zmenou rovnováhy aktívneho výkonu v systéme napájania (zmena rozdielu medzi elektrickým a mechanickým výkonom), čo vedie k zvýšeniu uhla δ, v dôsledku čoho môže stroj vypadnúť zo synchronizácie (narušenie stability). Uhol δ sa mení bez kmitov (aperiodicky), najskôr pomaly a potom rýchlejšie a rýchlejšie, akoby kĺzavo (pozri obr. 1a). Statická periodická (oscilačná) stabilita je spojená s nastavením automatických regulátorov budenia (ARV) generátorov. ARV musia byť nakonfigurované tak, aby sa vylúčila možnosť samovoľného rozkývania systému v širokom rozsahu prevádzkových režimov. Pri niektorých kombináciách opráv (situácia v režime obvodu) a nastavení regulátora budenia sa však môžu vyskytnúť oscilácie v riadiacom systéme, ktoré spôsobujú narastajúce kolísanie uhla δ až po vypadnutie stroja zo synchronizácie. Tento jav sa nazýva samorozkývanie (pozri obr. 1b). Obr.1. Povaha zmeny uhla δ v rozpore so statickou stabilitou vo forme kĺzania (a) a samovoľného kývania (b) Statická aperiodická (creepová) stabilita Prvou etapou štúdia statickej stability je štúdium statickej aperiodickej stability. Pri štúdiu statickej aperiodickej stability sa predpokladá, že pravdepodobnosť oscilačného narušenia stability so zvýšením prietoku medzisystémovými spojeniami je veľmi malá a samokyvné je možné zanedbať. Na určenie oblasti aperiodickej stability energetického systému sa zvažuje režim prevádzky energetického systému. Metóda váženia spočíva v postupnej zmene parametrov uzlov alebo vetiev, prípadne ich skupín po daných krokoch s následným výpočtom nového ustáleného stavu v každom kroku zmeny a vykonáva sa až do poskytnutia možnosti výpočtu. Zvážte najjednoduchší obvod sieť, ktorá pozostáva z generátora, výkonový transformátor, elektrické vedenia a zbernice s nekonečným výkonom (pozri obr. 2). Obr.2. Ekvivalentný okruh zúčtovacieho okruhu V najjednoduchšom uvažovanom prípade je elektromagnetická energia, ktorú možno preniesť z generátora na pneumatiky s nekonečným výkonom, opísaná nasledujúcim výrazom: V písomnom vyjadrení je premennou modulo sieťové napätie na staničných autobusoch redukovaný na stranu VN a premennou je modul lineárneho napätia v mieste pneumatík nekonečného výkonu. Obr.3. Vektorový diagram napätia Vzájomný uhol medzi vektorom napätia a vektorom napätia je označený premennou - , pre ktorú je smer proti smeru hodinových ručičiek od vektora napätia braný ako kladný smer. Je potrebné poznamenať, že vzorec pre elektromagnetický výkon je napísaný za predpokladu, že generátor je vybavený automatickým regulátorom budenia, ktorý riadi napätie na strane napätia generátora (), a tiež zanedbaný pre jednoduchosť výpočtov. aktívny odpor v prvkoch výpočtovej schémy. Analýzou vzorca pre elektromagnetickú energiu môžeme dospieť k záveru, že množstvo energie prenesenej do energetického systému závisí od uhla medzi napätiami. Táto závislosť sa nazýva uhlová charakteristika prenosu výkonu (pozri obr. 4). Obr.4. Uhlová výkonová charakteristika Ustálený (synchrónny) režim činnosti generátora je určený rovnosťou dvoch momentov pôsobiacich na hriadeľ turbogenerátora (predpokladáme, že moment odporu vplyvom trenia v ložiskách a odpor chladiaceho média môžeme zanedbať). ): turbínový moment Mt, ktorý otáča rotor generátora a má tendenciu zrýchľovať jeho otáčanie, a synchrónny elektromagnetický krútiaci moment pani proti otáčaniu rotora. Predpokladajme, že do turbíny generátora vstupuje para, ktorá vytvára krútiaci moment na hriadeli turbíny (s určitou aproximáciou sa rovná vonkajšiemu momentu Mvn prenášané z hlavného ťahúňa). Prevádzka generátora v ustálenom stave môže byť v dvoch bodoch: A a B, pretože v týchto bodoch je udržiavaná rovnováha medzi krútiacim momentom turbíny a elektromagnetickým krútiacim momentom, berúc do úvahy straty. bod ALE
zvýšenie/zníženie výkonu turbíny o ΔP povedie k zvýšeniu/zníženiu uhla d, resp. Tým je zachovaná rovnováha momentov pôsobiacich na hriadeľ rotora (rovnosť krútiaceho momentu turbíny a elektromagnetického krútiaceho momentu pri zohľadnení strát), a tým sa synchrónny stroj nerozbije so sieťou. Keď beží synchrónny stroj bod AT
zvýšenie/zníženie výkonu turbíny o ΔP povedie k zmenšeniu/zväčšeniu uhla d, resp. Tým je narušená rovnováha momentov pôsobiacich na hriadeľ rotora. V dôsledku toho buď generátor vypadne zo synchronizácie (t. j. rotor sa začne otáčať s frekvenciou odlišnou od rýchlosti otáčania magnetické pole stator), alebo synchrónny stroj prejde do bodu stabilnej prevádzky (bod ALE). Z uvažovaného príkladu teda možno vidieť, že najjednoduchším kritériom na udržanie statickej stability je kladné znamienko výrazu, ktorý určuje pomer prírastku výkonu k prírastku uhla: Oblasť stabilnej prevádzky je teda určená rozsahom uhlov od 0 do 90 stupňov a v oblasti uhlov od 90 do 180 stupňov nie je možná stabilná paralelná prevádzka. Maximálna hodnota výkonu, ktorý je možné preniesť do energetického systému, sa nazýva hranica statickej stability a zodpovedá hodnote výkonu pod vzájomným uhlom 90 stupňov: Prevádzka pri maximálnom výkone zodpovedajúcom uhlu 90 stupňov sa nevykonáva, pretože malé poruchy, ktoré sú vždy prítomné v napájacom systéme (napríklad kolísanie zaťaženia), môžu spôsobiť prechod do nestabilnej oblasti a narušenie synchronizácie. Za maximálnu prípustnú hodnotu prenášaného výkonu sa považuje hodnota menšia ako medza statickej stability o hodnotu bezpečnostného faktora statickej aperiodickej stability pre činný výkon. Rozpätie statickej stability pre prenos energie v normálnom režime by malo byť aspoň 20 %. Hodnota prípustného toku činného výkonu v riadenej sekcii podľa tohto kritéria je určená vzorcom: Hranica statickej stability pre prenos energie v pohavarijnom režime by mala byť aspoň 8 %. Hodnota prípustného toku činného výkonu v riadenej sekcii podľa tohto kritéria je určená vzorcom: Statická periodická (vibračná) stabilita Nesprávne zvolený zákon riadenia alebo nesprávne nastavenie parametrov automatického regulátora budenia (ARC) môže viesť k narušeniu oscilačnej stability. V tomto prípade môže dôjsť k narušeniu oscilačnej stability v režimoch neprekračujúcich limitný režim z hľadiska aperiodickej stability, ktorá bola opakovane pozorovaná pri prevádzke elektrických energetických systémov. Štúdium oscilačnej statickej stability je redukované na tieto kroky: 1. Zostavenie sústavy diferenciálnych rovníc, ktorá popisuje uvažovanú elektrizačnú sústavu. 2. Výber nezávislých premenných a linearizácia zapísaných rovníc za účelom vytvorenia systému lineárnych rovníc. 3. Zostavenie charakteristickej rovnice a určenie oblasti statickej stability v priestore nastaviteľných (nezávislých) nastavení AEC. O udržateľnosti nelineárny systém posudzované podľa útlmu prechodového procesu, ktorý je určený koreňmi charakteristickej rovnice sústavy. Na zabezpečenie stability je potrebné a postačujúce, aby korene charakteristickej rovnice mali záporné reálne časti. Na posúdenie stability použite rôzne metódy analýza charakteristických rovníc: 1. Algebraické metódy (Rouseova metóda, Hurwitzova metóda) založené na analýze koeficientov charakteristickej rovnice. 2. frekvenčné metódy (Michajlov, Nyquist, D-partitions) založené na analýze frekvenčných charakteristík. Opatrenia na zvýšenie hranice statickej stability Opatrenia na zvýšenie limitu statickej stability sa určujú analýzou vzorca na určenie elektromagnetického výkonu (vzorec je napísaný za predpokladu, že generátor je vybavený automatickým regulátorom budenia): 1. Použitie silných ARV na generujúcich zariadeniach. Jeden z účinnými prostriedkami zvýšenie statickej stability je použitie ARV generátorov silnej akcie. Pri použití ARV prístrojov silných akčných generátorov sa mení uhlová charakteristika: maximum charakteristiky sa posúva do rozsahu uhlov väčších ako 90° (berúc do úvahy relatívny uhol generátora). 2. Udržiavanie napätia v bodoch siete pomocou zariadení na kompenzáciu jalového výkonu. Inštalácia zariadení na kompenzáciu jalového výkonu (SC, CSR, STK atď.) na udržanie napätia v bodoch siete (zariadenia na kompenzáciu jalového výkonu). Zariadenia umožňujú udržiavať napätie v bodoch siete, čo priaznivo ovplyvňuje hranicu statickej stability. 3. Inštalácia zariadení pozdĺžnej kompenzácie (UPC). So zväčšovaním dĺžky vedenia sa úmerne zvyšuje jeho reaktancia a v dôsledku toho je výrazne obmedzená hranica prenášaného výkonu (stabilita paralelná práca). Zníženie reaktancie dlhého prenosového vedenia zvyšuje jeho priepustnosť. Na zníženie indukčného odporu elektrického vedenia je v reze vedenia inštalované pozdĺžne kompenzačné zariadenie (PCD), čo je batéria statických kondenzátorov. Tým sa zníži výsledný odpor vedenia, čím sa zvýši priepustnosť. Statická stabilita sa chápe ako schopnosť energetického systému udržiavať synchrónnu paralelnú prevádzku generátorov pri malých poruchách a pomalých zmenách parametrov režimu. Na obr. 10.2a je znázornená schéma elektrického systému pozostávajúceho z elektrárne ES, elektrického vedenia W a prijímacieho energetického systému s nekonečným výkonom. To je známe elektrická energia P, generovaný elektrárňou a spotrebovaný záťažou elektrizačnej sústavy, sa rovná Ryža. 10.2. Diagram prenosu výkonu (a), vektorový diagram prúdu a napätia (b) a uhlová charakteristika prenosu výkonu (c) kde je EMF generátorov elektrárne; - napätie napájacieho systému; Agres - výsledný odpor generátorov elektrárne, elektrických vedení a energetických systémov. Ak sú EMF generátorov, napätie systému a nezmenené, potom elektrický výkon prenášaný elektrárňou do energetického systému závisí od uhla medzi vektormi (obr. 10.2, b). Táto závislosť má sínusový charakter, nazýva sa to uhlová charakteristika prenosu výkonu (obr. 10.2, c). Maximálna hodnota výkonu, ktorý je možné preniesť do energetického systému, sa nazýva limit statickej stability: Táto hodnota výkonu zodpovedá amplitúde uhlovej charakteristiky (bod 3 na obr. 10.2, c). Stabilita paralelnej prevádzky elektrárne voči prijímaciemu energetickému systému je určená pomerom mechanického výkonu vyvinutého turbínami stanice a elektrického výkonu daného generátormi. Normálny ustálený stav je charakterizovaný rovnosťou mechanického výkonu vyvinutého turbínami a elektrického výkonu dodávaného generátormi: Výkon turbíny nezávisí od uhla 6 a je určený iba množstvom energie dodanej do turbíny. Podmienka (10.3) zodpovedá bodom 1 a 2 na obr. 10,2, c. Bod 1 je bodom stabilnej rovnováhy a bod 2 je bodom nestabilnej rovnováhy. Oblasť stabilnej prevádzky je určená rozsahom uhlov od 0 do 90°. V oblasti uhlov väčších ako 90° nie je možná stabilná paralelná prevádzka. Prevádzka pri maximálnom výkone zodpovedajúcom uhlu 90° sa nevykonáva, pretože malé poruchy, ktoré sú vždy prítomné v napájacom systéme, kolísanie zaťaženia, môžu spôsobiť prechod do nestabilnej oblasti a narušenie synchronizácie. Predpokladá sa, že maximálna povolená hodnota prenášaného výkonu je menšia ako medza statickej stability. Rezerva sa odhaduje pomocou faktora statickej stability, %: Rozpätie statickej stability pre prenos energie v normálnom režime by malo byť najmenej 20% av krátkodobom režime po nehode (pred zásahom personálu do regulácie režimu) - najmenej 8%. Statická stabilita Statická stabilita sa chápe ako schopnosť energetického systému udržiavať synchrónnu paralelnú prevádzku generátorov pri malých poruchách a pomalých zmenách parametrov režimu. Na obr. 9.2, a znázorňuje schému elektrického systému pozostávajúceho z elektrárne ES, prenosové vedenia a prijímacie energetické systémy s nekonečne vysokým výkonom. Je známe, že elektrická energia R, vyvinuté elektrárňou a spotrebované záťažou energetického systému sa rovná: kde E t- EMP generátorov elektrární; Uc- napätie napájacieho systému; Khrez - výsledný odpor generátorov elektrárne, elektrického vedenia a energetického systému. Ak EMF generátorov napr. systémové napätie Uc a X 9a sú nezmenené, potom elektrický výkon prenášaný elektrárňou do energetického systému závisí od uhla medzi vektormi £ r a 0 s(obr. 9.2.6). Táto závislosť má sínusový charakter, nazýva sa to uhlová charakteristika prenosu výkonu (obr. 9.2, c). Maximálna hodnota výkonu, ktorý je možné preniesť do energetického systému, sa nazýva limit statickej stability: Výkon turbíny nezávisí od uhla θ a je určený len množstvom energie dodanej do turbíny. Podmienka (9.3) zodpovedá bodom / n 2
na obr. 9.2, v. Bodka ja je bod stabilnej rovnováhy a bod 2 je nestabilná rovnováha. Oblasť stabilnej prevádzky je určená rozsahom uhlov b od 0 do 90 e. V oblasti uhlov väčších ako 90° je stabilná paralelná prevádzka nemožná. Prevádzka pri maximálnom výkone zodpovedajúcom uhlu 90 ° sa nevykonáva, pretože malé poruchy, ktoré sú vždy prítomné v napájacom systéme, kolísanie zaťaženia, môžu spôsobiť prechod do nestabilnej oblasti a narušenie synchronizácie. Predpokladá sa, že maximálna povolená hodnota prenášaného výkonu je menšia ako medza statickej stability. Rezerva sa odhaduje pomocou faktora statickej stability, %: Rozpätie statickej stability pre prenos energie v normálnom režime by malo byť najmenej 20% av krátkodobom režime po nehode (pred zásahom personálu do riadenia režimu) - najmenej 8%. Dynamická stabilita Dynamická stabilita je chápaná ako schopnosť elektrizačnej sústavy udržiavať synchrónny paralelný chod generátorov pri výrazných náhlych poruchách, ktoré sa vyskytujú v elektrizačnej sústave (skrat, núdzové odstavenie generátorov, vedení, transformátorov). Plošná metóda sa používa na hodnotenie dynamickej stability. Ako príklad uvažujme režim prevádzky dvojokruhového prenosu energie spájajúceho elektráreň s elektrizačnou sústavou v prípade skratu na jednom z vedení s odpojeným poškodeným vedením a jeho úspešnou AR (obr. 9.3, a). Počiatočný režim prenosu výkonu je charakterizovaný bodom / umiestneným na uhlovej charakteristike /, ktorý zodpovedá pôvodnej schéme prenosu výkonu (obr. 9.3.6). So skratom v určitom bode K1 na linke W2 uhlová charakteristika prenosu výkonu zaujíma polohu //. Pokles amplitúdy charakteristiky // je spôsobený výrazným zvýšením výsledného odporu x re, medzi bodmi aplikácie Napr a U a . V čase, keď dôjde ku skratu. vybitie elektrického "výkonu o hodnotu AR znížením napätia na prípojniciach stanice (bod 2
na obr. 9.3.6). Výboj elektrickej energie závisí od typu skratu a jeho polohy. V obmedzujúcom prípade pri trojfázovom skrate na prípojniciach stanice sa výkon vynuluje. Vplyvom prebytku mechanického výkonu turbín nad elektrickým výkonom sa rotory generátorov stanice začnú zrýchľovať a zväčší sa uhol 6 ". Proces zmeny výkonu sleduje charakteristiku //. Bod 3
zodpovedá momentu odpojenia poškodeného vedenia z oboch strán reléovými ochrannými zariadeniami RZ. Po odpojení vedenia je režim prenosu energie charakterizovaný bodom 4,
nachádza na charakteristike ke, čo zodpovedá schéme prenosu energie s jedným odpojeným vedením. Pri zmene uhla z 6i na 6i získavajú rotory generátorov stanice dodatočnú kinetickú energiu. Táto energia je úmerná ploche ohraničenej čiarou Rt, charakteristika // a súradnice v bodoch 1 p 3. Táto oblasť sa nazýva oblasť zrýchlenia S y . Na mieste 4
začína proces brzdenia rotorov, pretože elektrický výkon je väčší ako výkon turbín. Ale proces brzdenia nastáva so zväčšením uhla θ. Zväčšovanie uhla θ bude pokračovať, kým sa všetka uložená kinetická energia nepremení na potenciálnu energiu. Potenciálna energia je úmerná ploche ohraničenej čiarou Rt a uhlové charakteristiky po núdzovej situácii. Táto oblasť sa nazýva brzdná oblasť S T . V bode 5 po určitej pauze po odpojení linky W2 spustí sa zariadenie s automatickým opätovným zatváraním (má používať trojfázové rýchle automatické opätovné zatváranie s malou prestávkou). S úspešnou AR bude proces zvyšovania uhla pokračovať podľa charakteristiky Z, 1 zodpovedajúcej pôvodnej schéme prenosu energie. Zväčšovanie uhla sa zastaví v bode 7,
ktorý sa vyznačuje rovnosťou plôch S y a S T . V bode 7 sa prechodový proces nezastaví: vzhľadom na to, že elektrický výkon prekročí výkon turbín, proces spomalenia bude pokračovať podľa charakteristiky /, ale len s poklesom uhla. Proces sa ustáli v bode / po niekoľkých osciláciách okolo tohto bodu. Charakter zmeny uhla b v čase je znázornený na obr. 9,3, c. Pre zjednodušenie analýzy sa výkon turbín P t počas procesu prechodu berie nezmenený. V skutočnosti sa trochu mení v dôsledku činnosti regulátorov otáčok turbíny. Analýza teda ukázala, že za podmienok tohto príkladu je zachovaná stabilita paralelnej prevádzky. Nevyhnutnou podmienkou dynamickej stability je splnenie podmienok statickej stability v pohavarijnom režime. V uvažovanom príklade je táto podmienka splnená, keďže výkon turbín neprekračuje hranicu statickej stability. Stabilita paralelnej prevádzky by bola narušená, ak by v prechodovom procese uhol 6 prekročil hodnotu zodpovedajúcu bodu 8.
Bodka 8
obmedzuje maximálnu brzdnú plochu vpravo. Uhol zodpovedajúci bodu 8,
sa nazýval kritických 6 KP. Pri prekročení tejto hranice sa pozoruje lavínový nárast uhla 6, t.j. generátory vypadnú zo synchronizácie. Miera dynamickej stability sa odhaduje pomocou koeficientu, ktorý sa rovná pomeru maximálnej možnej brzdnej plochy k oblasti zrýchlenia: Pre £ 3, dyn > 1, je režim stabilný, pre A 3, dy<1 происходит нарушение устойчивости. В случае неуспешного АПВ (включение линии на неустранившееся КЗ) процесс из точки 5 перейдет на характеристику //. Нетрудно убедиться, что в условиях tento príklad stabilita po opakovanom skrate a následnom odpojení vedenia nie je zachovaná. 1.1.
Pojem statickej a dynamickej stability v elektrizačných sústavách Pod stabilitou stavu elektrického systému sa rozumie jeho schopnosť obnoviť pôvodný režim (alebo mu dostatočne blízky) po dopade akejkoľvek poruchy ("veľkej" alebo "malej"). Proces narušenia stability v elektrických systémoch je vždy spojený s obmedzenou kapacitou jeho jednotlivých prvkov - komunikačných liniek, transformátorov atď. Samozrejme, pri nezmenených parametroch elektrizačnej sústavy je hranica prenášaného výkonu závislá od napäťových úrovní a strát prenášaného výkonu na odporoch prvkov. Porušenie stability v elektrických systémoch sa vyskytuje v dôsledku vplyvu rušivých faktorov na jeho prácu, ktoré môžu byť "veľké" a "malé". Priebeh procesu je v tomto prípade rovnaký a je v každom prípade sprevádzaný prudkým poklesom napätia v uzloch systému (vzhľad „lavíny“ napätia), nárastom prúdu v jeho vetvách a zmena rýchlosti otáčania elektrických strojov. Porušenie stability vždy končí objavením sa asynchrónneho pohybu spojeného s neobmedzenou zmenou rýchlosti otáčania synchrónnych strojov a často vedie ku "kolapsu" systému - odpojenie záťaže, generátory staníc, rozdelenie systému na nesynchrónne pracujúce časti. "Malé" poruchy sú nebezpečné pre prevádzku elektrických systémov v náročných podmienkach, keď výkon prúdi v blízkosti limitného toku cez jeho prvky. Zatiaľ čo "veľké" poruchy môžu spôsobiť narušenie stability v normálnych režimoch. V závislosti od príčiny, ktorá viedla k narušeniu stability, sa rozlišujú tri typy se: -
statická stabilita
- schopnosť systému udržiavať (obnoviť) pôvodný (alebo jemu blízky) režim pri pôsobení "malých" porúch. -
dynamická stabilita -
schopnosť systému obnoviť dlhodobý ustálený stav pri „veľkých“ poruchách. -
výsledná stabilita
- schopnosť systému vrátiť sa po krátkodobom narušení stability do dlhodobého ustáleného stavu. Statická stabilita synchrónneho generátora Posúdenie statickej stability synchrónneho generátora pripojeného na prípojnice elektrizačnej sústavy (obr. 1) je možné vykonať pomocou druhého Newtonovho zákona pre rotačné teleso kde M v - krútiaci moment na hriadeli výkonového motora, kg.m; M s - moment odporu (brzdný moment) na hriadeli generátora, kg.m; ω - uhlová frekvencia otáčania hriadeľa jednotky, s -1; Moment zotrvačnosti, kg.m.s 2 ; GD 2 - zotrvačníkové hmoty rotujúcich častí pripevnených na hriadele hnacieho motora a generátora, kg.m 2; g \u003d 9,81 m / s 2 - gravitačné zrýchlenie. 1. Schéma prenosu výkonu zo synchrónneho generátora do elektrizačnej sústavy a jej ekvivalentná schéma: T - turbína; G - generátor; T1 - transformátor rozvodne; L1, L2 - elektrické vedenie; T2 - transformátor na pripojenie k napájaciemu systému; ES - energetický systém. Statická stabilita synchrónneho agregátu sa vyhodnocuje pri konštantných synchrónnych otáčkach, pri ktorých je výkon na hriadeli výkonového motora a synchrónneho generátora úmerný momentom a v relatívnych jednotkách sú rovnaké, t.j. Statická stabilita sa hodnotí pri relatívnom pohybe rotora agregátu, t.j. pri pohybe rotora voči vektoru točivého elektromagnetického poľa statora generátora (obr. 2), pri zmene uhla odklonu. rotora. Jeho rýchlosť zmeny zodpovedá derivácii
(1.1.2) Pri relatívnom pohybe rotora generátora môže byť pohybová rovnica (1.1.1) znázornená takto: Ryža. Obr. 2. Hlavné konštrukčné schémy synchrónnych generátorov: a - nevyčnievajúci pól; b - vyčnievajúci pól Táto rovnica je rovnicou dynamickej rovnováhy, pretože s rovnosťou R t = P r uhol odchodu rotora 0 má konštantnú hodnotu. Ak nie je rovnosť síl, potom sa buď zrýchlenie jednotky uskutoční pri P t >
P G ,
alebo spomalenie pri R t
< Р
r, t.j. podľa znamienka rozdielu výkonu možno posúdiť povahu pohybu hriadeľa jednotky. Preto je vhodné použiť rovnicu (1.1.3) v tomto tvare kde ∆Р- nadmerný výkon Charakteristika výkonu energetického motora v súradniciach R, je priamka, pretože výkon vyvinutý motorom nezávisí od uhla rotora. Výkonová charakteristika synchrónneho generátora v súradniciach R, je znázornená sínusovou uhlovou charakteristikou (obr. 3) získanou z vektorového diagramu: pre stroj s nevýraznými pólmi (turbínový generátor) pre stroj s výraznými pólmi (hydrogenerátor) kde
odpor generátorov v pozdĺžnej a priečnej osi, berúc do úvahy odpory náhradného obvodu (pozri obr. 1) Pa obr. 3 sú znázornené charakteristiky turbíny a generátora. Charakteristiky majú dva body vzájomného priesečníka 1 a 2. V súlade s postavením teoretickej mechaniky v bodoch
















![]()
![]()






 (1.1.3)
(1.1.3)
 (1.1.4)
(1.1.4) (1.1.5)
(1.1.5) (1.1.6)
(1.1.6)
Svetlana Furshtakova Synopsa hry na hranie rolí v strednej skupine "Kaviareň" 1. Úlohy: 1. Pokračovať v oboznamovaní detí s ...

Sexsymbol ruskej scény, bývalý člen skupiny VIA Gra a jednoducho krásna Vera Brežneva odhaľuje tajomstvá ...
Ciele hodiny: Vzdelávacie: formovať poznatky o novej téme v súlade s programovým materiálom; preskúmať...

Zvláštnou vizuálnou odlišnosťou sú odtlačky vŕbových prútov po stranách hlavy, je to spôsobené zberom hotovej srvátky v...

Rastlina zlaté fúzy, známa aj ako kalisia voňavá, našla široké uplatnenie v ľudovom liečiteľstve. Verí sa, že...

Ako propagovať svoju firmu: pomocou internetu + propagácia pomocou videa + tvorba vizitiek a letákov + 5...

Pre správnu výsadbu, starostlivosť a umiestnenie weigely v záhrade nezabudnite, že weigela: dobre zakoreňuje na ...

Plnené palacinky s mletým mäsom sú výdatným jedlom pre celú rodinu. Tenký, beztiažový základ v spojení so šťavnatým...

V kuracích krídelkách nie je veľa mäsa. Napriek tomu ich mnohí gurmáni milujú. Ak sú krídla správne...

Pšeničná kaša je lacný a veľmi zdravý produkt. Aby to bolo chutné, potrebujete vedieť niekoľko ...

Ahoj! Dnes chcem hovoriť o tom, ako pripraviť paradajkový dresing na zimu na cestoviny....

Predstavte si veľký kus ošľahaného a obaľovaného mäsa, šťavnatého zvnútra a chrumkavého zvonku,...

Ponúkame nahradiť obvyklé klobásové sendviče tým najroztomilejším a najzaujímavejším občerstvením. Ruže z...

Výborným chudým (a tiež diétnym) snackom je pasta z chudých fazúľ. Obsahuje veľa bielkovín a...

Spravidla sú tieto orgány životne dôležité. Existuje zoznam srdcových chorôb v prítomnosti ...

Dospelý bičíkovec v ľudskom hrubom čreve objavený počas kolonoskopickej epidemiológie po celom svete...