Synopsa hry na hranie rolí „Hra na sladké kaviarne: „Vezmi si hudobnú stoličku“
Svetlana Furshtakova Synopsa hry na hranie rolí v strednej skupine "Kaviareň" 1. Úlohy: 1. Pokračovať v oboznamovaní detí s ...
STATICKÁ STABILITA
energetický systém – schopnosť systém elektrickej energie obnoviť počiatočný stav (režim) po jeho malých poruchách. Porušenie S. at. môže nastať pri prenose veľkých výkonov cez elektrické vedenie (zvyčajne predĺžené), s poklesom napätia v uzloch záťaže v dôsledku nedostatku jalový výkon, kedy generátory elektrární pracujú v režime podbudenia. Hlavné opatrenia na zabezpečenie S. pri .: zvýšenie nominálnych. napätie elektrických prenosových vedení a zníženie ich indukčného odporu; automatické riadenie budenia veľké synchrónne stroje, aplikácia synchrónne kompenzátory, synchrónne motory a statické. kompenzátory jalového výkonu v uzloch záťaže. S. at. možno zvýšiť aj pri použití generátorov v energetických systémoch s riadením budenia v pozdĺžnom a priečnom vinutí rotora.
Veľký encyklopedický polytechnický slovník. 2004 .
Charakteristika stability lietadla, ktorý určuje jeho tendenciu vrátiť sa bez zásahu pilota do východiskovej rovnovážnej polohy pod vplyvom aerodynamického momentu (viď. Aerodynamické sily a momenty) spôsobeného ... ... Encyklopédia techniky
statická stabilita- elektrický systém; statická stabilita Schopnosť elektrického systému vrátiť sa do pôvodného režimu (alebo veľmi blízko k nemu) po malých poruchách režimu ...
statická stabilita- statinis stabilumas statusas T sritis automatika atitikmenys: angl. statická stabilita; ustálený stav stability vok. statische Stabilität, f rus. statická stabilita, f pranc. stabilité statique, f … Automatikos terminų žodynas
statická stabilita- statinis stabilumas statusas T sritis fizika atitikmenys: angl. statická stabilita vok. statische Stabilität, f rus. statická stabilita, f pranc. stabilité statique, f … Fizikos terminų žodynas
statická stabilita Encyklopédia "Letenie"
statická stabilita- statická stabilita charakteristika stability lietadla, ktorá určuje jeho tendenciu vrátiť sa bez zásahu pilota do pôvodnej rovnovážnej polohy vplyvom aerodynamického momentu (pozri Aerodynamický ... ... Encyklopédia "Letenie"
statická stabilita elektrického systému- statická stabilita elektrického systému; statická stabilita Schopnosť elektrického systému vrátiť sa do pôvodného režimu (alebo veľmi blízko k nemu) po malých poruchách režimu ... Polytechnický terminologický výkladový slovník
statická stabilita TKK- statická stabilita TKK: Uhol sklonu skúšobnej roviny, pri ktorom sa ktorékoľvek koleso TKK zdvihne nad túto rovinu. Zdroj: GOST R 52286 2004: Dopravné rehabilitačné invalidné vozíky. Hlavné parametre....
Statická stabilita energetického systému- 48. Statická stabilita elektrizačnej sústavy Schopnosť elektrizačnej sústavy vrátiť sa do rovnovážneho stavu po jej malých poruchách. Poznámka. Malá porucha režimu energetického systému sa chápe ako taká, pri ktorej sa menia parametre ... ... Slovník-príručka termínov normatívnej a technickej dokumentácie
Slovenčina: Statická (odporová) stabilita energetického systému Schopnosť elektrizačnej sústavy vrátiť sa po jej malých poruchách do ustáleného stavu (podľa GOST 21027 75) Zdroj: Pojmy a definície v elektroenergetike. Adresár… Stavebný slovník
Statická stabilita
Statická stabilita sa chápe ako schopnosť energetického systému udržiavať synchrónnu paralelnú prevádzku generátorov pri malých poruchách a pomalých zmenách parametrov režimu.
Na obr. 9.2, a znázorňuje schému elektrického systému pozostávajúceho z elektrárne ES, prenosové vedenia a prijímacie energetické systémy s nekonečne vysokým výkonom. Je známe, že elektrická energia R, vyvinuté elektrárňou a spotrebované záťažou energetického systému sa rovná:
kde E t- EMP generátorov elektrárne; U c- napätie napájacieho systému; Khrez - výsledný odpor generátorov elektrárne, elektrického vedenia a energetického systému.
Ak EMF generátorov napr. systémové napätie U c a X 9a nezmenené teda elektrická energia prenášaný elektrárňou do energetického systému závisí od uhla medzi vektormi £ r a 0 s(obr. 9.2.6). Táto závislosť má sínusový charakter, nazýva sa to uhlová charakteristika prenosu výkonu (obr. 9.2, c).
Maximálna hodnota výkonu, ktorý je možné preniesť do energetického systému, sa nazýva limit statickej stability:

Výkon turbíny nezávisí od uhla θ a je určený len množstvom energie dodanej do turbíny.
Podmienka (9.3) zodpovedá bodom / n 2 na obr. 9.2, v. Bodka ja je bod stabilnej rovnováhy a bod 2 je nestabilná rovnováha. Oblasť stabilnej prevádzky je určená rozsahom uhlov b od 0 do 90 e. V oblasti uhlov väčších ako 90° je stabilná paralelná prevádzka nemožná. Prevádzka pri maximálnom výkone zodpovedajúcom uhlu 90 ° sa nevykonáva, pretože malé poruchy, ktoré sú vždy prítomné v napájacom systéme, kolísanie zaťaženia, môžu spôsobiť prechod do nestabilnej oblasti a narušenie synchronizácie. Predpokladá sa, že maximálna povolená hodnota prenášaného výkonu je menšia ako medza statickej stability. Rezerva sa odhaduje pomocou faktora statickej stability, %:
Rozpätie statickej stability pre prenos energie v normálnom režime by malo byť najmenej 20% av krátkodobom režime po nehode (pred zásahom personálu do riadenia režimu) - najmenej 8%.
Dynamická stabilita
Dynamická stabilita je chápaná ako schopnosť elektrizačnej sústavy udržiavať synchrónny paralelný chod generátorov pri výrazných náhlych poruchách, ktoré sa vyskytujú v elektrizačnej sústave (skrat, núdzové odstavenie generátorov, vedení, transformátorov). Pre sadzbu dynamická stabilita aplikuje sa plošná metóda. Ako príklad uvažujme režim prevádzky dvojokruhového prenosu energie spájajúceho elektráreň s elektrizačnou sústavou v prípade skratu na jednom z vedení s odpojeným poškodeným vedením a jeho úspešnou AR (obr. 9.3, a).
Počiatočný režim prenosu výkonu je charakterizovaný bodom / umiestneným na uhlovej charakteristike /, ktorý zodpovedá pôvodnej schéme prenosu výkonu (obr. 9.3.6). So skratom v určitom bode K1 na linke W2 uhlová charakteristika prenosu výkonu zaujíma polohu //. Pokles amplitúdy charakteristiky // je spôsobený výrazným zvýšením výsledného odporu x re, medzi bodmi aplikácie Napr a U a . V čase, keď dôjde ku skratu. vybitie elektrického "výkonu o hodnotu AR znížením napätia na prípojniciach stanice (bod 2 na obr. 9.3.6). Výboj elektrickej energie závisí od typu skratu a jeho polohy. V obmedzujúcom prípade pri trojfázovom skrate na prípojniciach stanice sa výkon vynuluje. Vplyvom prebytku mechanického výkonu turbín nad elektrickým výkonom sa rotory generátorov stanice začnú zrýchľovať a zväčší sa uhol 6 ". Proces zmeny výkonu sleduje charakteristiku //. Bod 3 zodpovedá momentu odpojenia poškodeného vedenia z oboch strán reléovými ochrannými zariadeniami RZ. Po odpojení vedenia je režim prenosu energie charakterizovaný bodom 4, nachádza na charakteristike

ke, čo zodpovedá schéme prenosu energie s jedným odpojeným vedením. Pri zmene uhla z 6i na 6i získavajú rotory generátorov stanice dodatočnú kinetickú energiu. Táto energia je úmerná ploche ohraničenej čiarou Rt, charakteristika // a súradnice v bodoch 1 p 3. Táto oblasť sa nazýva oblasť zrýchlenia S y . Na mieste 4 začína proces brzdenia rotorov, pretože elektrický výkon je väčší ako výkon turbín. Ale proces brzdenia nastáva so zväčšením uhla θ. Zväčšovanie uhla θ bude pokračovať, kým sa všetka uložená kinetická energia nepremení na potenciálnu energiu. Potenciálna energia je úmerná ploche ohraničenej čiarou Rt a uhlové charakteristiky po núdzovej situácii. Táto oblasť sa nazýva brzdná oblasť S T . V bode 5 po určitej pauze po odpojení linky W2 spustí sa zariadenie s automatickým opätovným zatváraním (má používať trojfázové rýchle automatické opätovné zatváranie s malou prestávkou). Pri úspešnej AR bude proces zväčšovania uhla pokračovať podľa charakteristiky Z, 1 zodpovedajúcej pôvodnej schéme prenosu energie. Zväčšovanie uhla sa zastaví v bode 7, ktorý sa vyznačuje rovnosťou plôch S y a S T . V bode 7 sa prechodový proces nezastaví: vzhľadom na to, že elektrický výkon prevyšuje výkon turbín, proces spomalenia bude pokračovať podľa charakteristiky /, ale len s poklesom uhla. Proces sa ustáli v bode / po niekoľkých osciláciách okolo tohto bodu. Charakter zmeny uhla b v čase je znázornený na obr. 9,3, c.
Pre zjednodušenie analýzy sa výkon turbín P t počas procesu prechodu berie nezmenený. V skutočnosti sa trochu mení v dôsledku činnosti regulátorov otáčok turbíny.
Analýza teda ukázala, že za podmienok tohto príkladu je zachovaná stabilita paralelná práca. Nevyhnutnou podmienkou dynamickej stability je splnenie podmienok statickej stability v pohavarijnom režime. V uvažovanom príklade je táto podmienka splnená, keďže výkon turbín neprekračuje hranicu statickej stability.
Stabilita paralelnej prevádzky by bola narušená, ak by v prechodovom procese uhol 6 prekročil hodnotu zodpovedajúcu bodu 8. Bodka 8 obmedzuje maximálnu brzdnú plochu vpravo. Uhol zodpovedajúci bodu 8, sa nazýval kritických 6 KP. Pri prekročení tejto hranice sa pozoruje lavínový nárast uhla 6, t.j. generátory vypadnú zo synchronizácie.
Miera dynamickej stability sa odhaduje pomocou koeficientu, ktorý sa rovná pomeru maximálnej možnej brzdnej plochy k oblasti zrýchlenia:
Pre £ 3, dyn > 1, je režim stabilný, pre A 3, dy<1 происходит нарушение устойчивости. В случае неуспешного АПВ (включение линии на неустранившееся КЗ) процесс из точки 5 перейдет на характеристику //. Нетрудно убедиться, что в условиях tento príklad stabilita po opakovanom skrate a následnom odpojení vedenia nie je zachovaná.
Na objasnenie základných ustanovení analýzy dynamickej stability zvážte javy, ktoré sa vyskytujú, keď sa jeden z dvoch paralelných obvodov vedenia na prenos energie jednostrojového energetického systému náhle vypne (obr. 2.1, a).
Ryža. 2.1. Energetický systém s jedným strojom (a) a jeho ekvivalentné obvody: pre normálny režim (b) a režim bez obvodu (c)
Vzájomná reaktancia náhradného obvodu (obr. 2.1, b), rovná
určuje maximálnu fj M uhlovej výkonovej charakteristiky generátora R] b) v pôvodnom režime:
Po vypnutí jedného z obvodov elektrického vedenia (obr. 2.1,) sa získa nový, väčší odpor
Maximum novej uhlovej charakteristiky /J|(5) bude mať menšiu hodnotu (obr. 2.2):

Ryža. 2.2.
Priesečník a výkonové charakteristiky turbíny /t(5) = konštantná a uhlová charakteristika generátora /j(5) = Ry sin 6 v normálnom režime zodpovedajú uhlu 6 0 , výkon R () a rýchlosť (frekvenciu) b. V dôsledku toho je narušená rovnováha výkonov (momentov) na hriadeľoch rotora generátora a turbíny v dôsledku poklesu brzdného momentu spôsobeného elektrickou záťažou. Uhol 8 0 a relatívna rýchlosť
si zachovajú svoje hodnoty v momente odpojenia obvodu v dôsledku zotrvačnosti rotora generátora. Následne, pri pôsobení nadmerného akceleračného momentu, sa relatívna rýchlosť zvyšuje a pri uhle 8 C sa stáva najväčšou.

Ryža. 2.3.
Na mieste s zrýchľovacie a spomaľovacie momenty sú vyvážené, ale rotor zotrvačnosťou v dôsledku dodatočnej kinetickej energie akumulovanej v sekcii bc, sa bude naďalej relatívne pohybovať. Tento pohyb však bude pomalší, keďže napravo od bodu s zrýchľujúci moment turbíny je menší ako spomaľovací elektromagnetický moment generátora. Nárast uhla sa zastaví na hodnote 8, „, keď dodatočná kinetická energia získaná rotorom v sekcii bc, kompenzovaná rovnakou potenciálnou energiou v oblasti cm. Je zrejmé, že pri hodnote uhla 6,n sa režim nenastaví, nakoľko v tomto stave je spomaľovací moment generátora vyšší ako akceleračný moment turbíny. Pri pôsobení nadmerného brzdného momentu z bodu t rotor sa vráti do uhla 8 C a opäť zotrvačnosťou prejde. Rotor sa však nevráti do počiatočného uhla 6° kvôli stratám trením a tlmiacim momentom. Amplitúda zmeny uhla s ďalšími výkyvmi rotora sa zníži (obr. 2.2, Obr. b) a nakoniec sa režim systému ustanoví v novom bode stabilnej rovnováhy – bode s.
Možný je však aj iný výsledok procesu. Ak uhol dosiahne kritickú hodnotu 8 cr, zodpovedajúcu bodu / (obr. 2.3, a), pred relatívnou rýchlosťou a nadobudne nulovú hodnotu, potom sa nadmerný krútiaci moment na hriadeli rotora generátora opäť zrýchli. Relatívna rýchlosť rotora sa tiež začína zvyšovať, až kým generátor nevypadne zo synchronizácie. Tento typ narušenia stability sa nazýva dynamický.
Hlavnou príčinou dynamického narušenia stability energetických systémov sú skraty, ktoré vedú k náhlym zmenám elektromagnetických momentov synchrónnych strojov.
 Fyzikálne základy stability elektrizačných sústav Statická stabilita elektrizačnej sústavy je stabilita s malými poruchami režimu. Z uvažovania o najjednoduchších mechanických systémoch vyplýva, že existujú stavy (režimy), v ktorých sa systém po náhodnej poruche snaží obnoviť pôvodný alebo jemu blízky režim. V iných režimoch náhodná porucha vedie systém preč z jeho počiatočného stavu. V prvom prípade je systém stabilný, v druhom je nestabilný.
Fyzikálne základy stability elektrizačných sústav Statická stabilita elektrizačnej sústavy je stabilita s malými poruchami režimu. Z uvažovania o najjednoduchších mechanických systémoch vyplýva, že existujú stavy (režimy), v ktorých sa systém po náhodnej poruche snaží obnoviť pôvodný alebo jemu blízky režim. V iných režimoch náhodná porucha vedie systém preč z jeho počiatočného stavu. V prvom prípade je systém stabilný, v druhom je nestabilný.
 Fyzikálne základy stability elektrizačných sústav V ustálenom stave je rovnováha medzi zdrojovou energiou vstupujúcou do sústavy a energiou spotrebovanou v záťaži a na krytie strát. Pri akejkoľvek poruche, ktorá sa prejaví zmenou parametra režimu na, je táto rovnováha narušená. Ak má systém také vlastnosti, že energia po poruche je spotrebovávaná intenzívnejšie ako generovaná elektrárňami, potom nový režim, ktorý v dôsledku poruchy vznikol, nemôže byť zásobovaný energiou a predchádzajúci ustálený stav alebo mu blízky musia byť obnovené v systéme. Takýto systém je stabilný.
Fyzikálne základy stability elektrizačných sústav V ustálenom stave je rovnováha medzi zdrojovou energiou vstupujúcou do sústavy a energiou spotrebovanou v záťaži a na krytie strát. Pri akejkoľvek poruche, ktorá sa prejaví zmenou parametra režimu na, je táto rovnováha narušená. Ak má systém také vlastnosti, že energia po poruche je spotrebovávaná intenzívnejšie ako generovaná elektrárňami, potom nový režim, ktorý v dôsledku poruchy vznikol, nemôže byť zásobovaný energiou a predchádzajúci ustálený stav alebo mu blízky musia byť obnovené v systéme. Takýto systém je stabilný.
 Fyzikálne základy stability elektroenergetických sústav Z definície stability vyplýva, že podmienkou udržania stability sústavy (kritérium stability) je pomerová, resp. diferenciálna forma. Toto množstvo sa nazýva nadbytočná energia. Táto energia je pozitívna, ak dodatočná generovaná energia, ktorá sa objavila počas poruchy, sa zvyšuje intenzívnejšie ako zaťaženie systému, berúc do úvahy straty v ňom.
Fyzikálne základy stability elektroenergetických sústav Z definície stability vyplýva, že podmienkou udržania stability sústavy (kritérium stability) je pomerová, resp. diferenciálna forma. Toto množstvo sa nazýva nadbytočná energia. Táto energia je pozitívna, ak dodatočná generovaná energia, ktorá sa objavila počas poruchy, sa zvyšuje intenzívnejšie ako zaťaženie systému, berúc do úvahy straty v ňom.
 Fyzikálne základy stability elektrizačných sústav Za tejto podmienky možno kritérium stability zapísať v tvare, t.j. režim je stabilný, ak je derivácia prebytočnej energie vzhľadom na definujúci parameter záporná.
Fyzikálne základy stability elektrizačných sústav Za tejto podmienky možno kritérium stability zapísať v tvare, t.j. režim je stabilný, ak je derivácia prebytočnej energie vzhľadom na definujúci parameter záporná.
 Fyzikálne základy stability elektroenergetických sústav Pre zabezpečenie stability sústavy je nevyhnutná hranica jej statickej stability, ktorá je charakterizovaná uhlami posunu rotorov generátorov a napäťových vektorov v uzlových bodoch sústavy. Veľký význam má hranica statickej stability v pohavarijnom režime - z hľadiska elektrického prenosového výkonu by mala byť 5 - 10%, v normálnom režime 15 - 20%. Tieto počty však nie sú striktne obmedzené.
Fyzikálne základy stability elektroenergetických sústav Pre zabezpečenie stability sústavy je nevyhnutná hranica jej statickej stability, ktorá je charakterizovaná uhlami posunu rotorov generátorov a napäťových vektorov v uzlových bodoch sústavy. Veľký význam má hranica statickej stability v pohavarijnom režime - z hľadiska elektrického prenosového výkonu by mala byť 5 - 10%, v normálnom režime 15 - 20%. Tieto počty však nie sú striktne obmedzené.
 Fyzikálne základy stability elektrizačných sústav Na kontrolu statickej stability sústavy je potrebné zostaviť diferenciálne rovnice malých výkyvov pre všetky jej prvky a ovládacie zariadenia a následne preskúmať korene charakteristickej rovnice stability. Keďže rigorózne riešenie takéhoto problému je veľmi ťažké, v inžinierskych výpočtoch sa používajú približné metódy štúdia stability, ktoré sú založené na použití praktických kritérií stability.
Fyzikálne základy stability elektrizačných sústav Na kontrolu statickej stability sústavy je potrebné zostaviť diferenciálne rovnice malých výkyvov pre všetky jej prvky a ovládacie zariadenia a následne preskúmať korene charakteristickej rovnice stability. Keďže rigorózne riešenie takéhoto problému je veľmi ťažké, v inžinierskych výpočtoch sa používajú približné metódy štúdia stability, ktoré sú založené na použití praktických kritérií stability.
 Statická stabilita systému "ekvivalentný generátor - zbernice konštantného napätia" Systém, v ktorom je jediná vzdialená elektráreň pripojená k autobusom (systému) s konštantným napätím, sa nazýva najjednoduchší (obr. 11. 1, a). Predpokladá sa, že celkový výkon elektrární systému výrazne prevyšuje výkon uvažovanej elektrárne. To vám umožňuje považovať napätie na systémových zberniciach za nezmenené v akomkoľvek režime jeho prevádzky. Najjednoduchší systém sa tiež nazýva model energetického systému s jedným strojom alebo model „stroj-bus“.
Statická stabilita systému "ekvivalentný generátor - zbernice konštantného napätia" Systém, v ktorom je jediná vzdialená elektráreň pripojená k autobusom (systému) s konštantným napätím, sa nazýva najjednoduchší (obr. 11. 1, a). Predpokladá sa, že celkový výkon elektrární systému výrazne prevyšuje výkon uvažovanej elektrárne. To vám umožňuje považovať napätie na systémových zberniciach za nezmenené v akomkoľvek režime jeho prevádzky. Najjednoduchší systém sa tiež nazýva model energetického systému s jedným strojom alebo model „stroj-bus“.

 STATICKÁ STABILITA Analyzovaná elektráreň je prepojená cez transformátorové prípojky a elektrické vedenie s generátormi výkonného koncentrovaného energetického systému, ktorý je taký výkonný, že jeho prijímacie zbernice sú označené ako nekonečné výkonové zbernice (BPM). Charakteristickými znakmi SHBM sú konštantné modulo napätie a konštantná frekvencia tohto napätia. Pri použití SHBM nie sú spravidla zobrazené zodpovedajúce energetické systémy v elektrických obvodoch. V ekvivalentných obvodoch sa ako prvok reprezentujúci výkonný systém používajú nekonečné výkonové zbernice.
STATICKÁ STABILITA Analyzovaná elektráreň je prepojená cez transformátorové prípojky a elektrické vedenie s generátormi výkonného koncentrovaného energetického systému, ktorý je taký výkonný, že jeho prijímacie zbernice sú označené ako nekonečné výkonové zbernice (BPM). Charakteristickými znakmi SHBM sú konštantné modulo napätie a konštantná frekvencia tohto napätia. Pri použití SHBM nie sú spravidla zobrazené zodpovedajúce energetické systémy v elektrických obvodoch. V ekvivalentných obvodoch sa ako prvok reprezentujúci výkonný systém používajú nekonečné výkonové zbernice.
 STATICKÁ STABILITA 11. 1, b sú znázornené dva hlavné bloky tepelnej elektrárne: turbína a generátor. Krútiaci moment turbíny závisí od množstva dodanej energie: pre parnú turbínu je to para, pre vodnú turbínu voda. V normálnom režime sú hlavné parametre nosiča energie stabilné, takže krútiaci moment je konštantný. Výkon dodávaný generátorom do systému je určený niekoľkými parametrami, ktorých vplyv závisí od výkonovej charakteristiky generátora.
STATICKÁ STABILITA 11. 1, b sú znázornené dva hlavné bloky tepelnej elektrárne: turbína a generátor. Krútiaci moment turbíny závisí od množstva dodanej energie: pre parnú turbínu je to para, pre vodnú turbínu voda. V normálnom režime sú hlavné parametre nosiča energie stabilné, takže krútiaci moment je konštantný. Výkon dodávaný generátorom do systému je určený niekoľkými parametrami, ktorých vplyv závisí od výkonovej charakteristiky generátora.
 STATICKÁ STABILITA Na získanie charakteristík výkonu generátora bol skonštruovaný vektorový diagram prenosu výkonu (obr. 11. 1, c). Tu sa celkový prúdový vektor rozloží na jeho skutočné a imaginárne zložky a odpor sa získa z ekvivalentného obvodu systému znázorneného na obr. 11,1, g:
STATICKÁ STABILITA Na získanie charakteristík výkonu generátora bol skonštruovaný vektorový diagram prenosu výkonu (obr. 11. 1, c). Tu sa celkový prúdový vektor rozloží na jeho skutočné a imaginárne zložky a odpor sa získa z ekvivalentného obvodu systému znázorneného na obr. 11,1, g:
 STATICKÁ STABILITA Z vektorového diagramu vyplýva, že kde je aktívna zložka prúdu, je uhol posunu vektora EMF voči vektoru napätia. Vynásobením oboch strán rovnice dostaneme, (11.1) kde je činný výkon generátora (uvedený v relatívnych jednotkách).
STATICKÁ STABILITA Z vektorového diagramu vyplýva, že kde je aktívna zložka prúdu, je uhol posunu vektora EMF voči vektoru napätia. Vynásobením oboch strán rovnice dostaneme, (11.1) kde je činný výkon generátora (uvedený v relatívnych jednotkách).
 STATICKÁ STABILITA Závislosť (11.1) má sínusový charakter a nazýva sa výkonová charakteristika generátora. Pri konštantnom EMF a napätí generátora je uhol natočenia rotora generátora určený iba jeho aktívnym výkonom, ktorý je zase určený výkonom turbíny. Výkon turbíny závisí od množstva nosiča energie a v súradniciach je znázornený priamkou.
STATICKÁ STABILITA Závislosť (11.1) má sínusový charakter a nazýva sa výkonová charakteristika generátora. Pri konštantnom EMF a napätí generátora je uhol natočenia rotora generátora určený iba jeho aktívnym výkonom, ktorý je zase určený výkonom turbíny. Výkon turbíny závisí od množstva nosiča energie a v súradniciach je znázornený priamkou.
 STATICKÁ STABILITA Pri určitých hodnotách EMF generátora a napätia na prijímacej strane má výkonová charakteristika maximum, ktoré sa vypočíta podľa vzorca. (11. 2) Hodnota sa nazýva aj „ideálny“ výkonový limit elektrického systému. Každá hodnota výkonu turbíny zodpovedá dvom priesečníkom charakteristík a a b (obr. 11. 2, a), v ktorých sú výkony generátora a turbíny navzájom rovnaké.
STATICKÁ STABILITA Pri určitých hodnotách EMF generátora a napätia na prijímacej strane má výkonová charakteristika maximum, ktoré sa vypočíta podľa vzorca. (11. 2) Hodnota sa nazýva aj „ideálny“ výkonový limit elektrického systému. Každá hodnota výkonu turbíny zodpovedá dvom priesečníkom charakteristík a a b (obr. 11. 2, a), v ktorých sú výkony generátora a turbíny navzájom rovnaké.

 STATICKÁ STABILITA Zvážte režim prevádzky v bode a. Ak sa výkon generátora zvýši o hodnotu, potom sa uhol podľa sínusovej závislosti zmení o hodnotu. Z obr. 11. 2 a vyplýva, že v bode a kladný prírastok výkonu zodpovedá kladnému prírastku uhla. Pri zmene výkonu generátora je narušená rovnováha momentov turbíny a generátora. So zvýšením výkonu generátora vzniká na hriadeli rotora, ktorý sa pripája k turbíne, brzdný moment, ktorý prevyšuje krútiaci moment turbíny. Brzdný moment spôsobuje spomalenie rotora generátora, čo spôsobí pohyb rotora a s ním spojeného vektora EMF v smere zmenšovania uhla (obr. 11. 2, b).
STATICKÁ STABILITA Zvážte režim prevádzky v bode a. Ak sa výkon generátora zvýši o hodnotu, potom sa uhol podľa sínusovej závislosti zmení o hodnotu. Z obr. 11. 2 a vyplýva, že v bode a kladný prírastok výkonu zodpovedá kladnému prírastku uhla. Pri zmene výkonu generátora je narušená rovnováha momentov turbíny a generátora. So zvýšením výkonu generátora vzniká na hriadeli rotora, ktorý sa pripája k turbíne, brzdný moment, ktorý prevyšuje krútiaci moment turbíny. Brzdný moment spôsobuje spomalenie rotora generátora, čo spôsobí pohyb rotora a s ním spojeného vektora EMF v smere zmenšovania uhla (obr. 11. 2, b).
 STATICKÁ STABILITA Je potrebné zdôrazniť, že pohyb rotora pri pôsobení nadmerného krútiaceho momentu je superponovaný na jeho pohyb v kladnom smere so synchrónnou rýchlosťou, ktorá je mnohonásobne väčšia ako rýchlosť tohto pohybu. V dôsledku toho sa v bode a obnoví pôvodný režim prevádzky a ako vyplýva z definície statickej stability, tento režim je stabilný. Rovnaký záver možno dosiahnuť znížením výkonu generátora v bode a.
STATICKÁ STABILITA Je potrebné zdôrazniť, že pohyb rotora pri pôsobení nadmerného krútiaceho momentu je superponovaný na jeho pohyb v kladnom smere so synchrónnou rýchlosťou, ktorá je mnohonásobne väčšia ako rýchlosť tohto pohybu. V dôsledku toho sa v bode a obnoví pôvodný režim prevádzky a ako vyplýva z definície statickej stability, tento režim je stabilný. Rovnaký záver možno dosiahnuť znížením výkonu generátora v bode a.
 STATICKÁ STABILITA Ak sa výkon generátora v bode b zníži, potom sa na hriadeli rotora generátora objaví zrýchľujúci sa nadmerný krútiaci moment, ktorý zväčšuje uhol. So zväčšovaním uhla výkon generátora ďalej klesá, čo vedie k dodatočnému zvýšeniu akceleračného krútiaceho momentu, teda dochádza k lavínovému procesu, ktorý sa nazýva vypadávanie zo synchronizácie. Proces vypadnutia zo synchronizácie a asynchrónneho režimu, v ktorom generátor končí, je charakterizovaný nepretržitým pohybom vektora EMF vzhľadom na napätie prijímacieho systému.
STATICKÁ STABILITA Ak sa výkon generátora v bode b zníži, potom sa na hriadeli rotora generátora objaví zrýchľujúci sa nadmerný krútiaci moment, ktorý zväčšuje uhol. So zväčšovaním uhla výkon generátora ďalej klesá, čo vedie k dodatočnému zvýšeniu akceleračného krútiaceho momentu, teda dochádza k lavínovému procesu, ktorý sa nazýva vypadávanie zo synchronizácie. Proces vypadnutia zo synchronizácie a asynchrónneho režimu, v ktorom generátor končí, je charakterizovaný nepretržitým pohybom vektora EMF vzhľadom na napätie prijímacieho systému.
 STATICKÁ STABILITA Ak sa výkon generátora zvýši v bode b, potom dôjde k nadmernému brzdnému momentu, ktorý spôsobí, že sa pracovný bod systému turbína-generátor posunie do bodu a. Bod a výkonovej charakteristiky je teda bodom stabilnej rovnováhy momentov turbíny a generátora, bod b je bodom nestabilnej rovnováhy. Podobne všetky body ležiace na rastúcej časti výkonovej charakteristiky sú bodmi stabilnej prevádzky sústavy a body ležiace na klesajúcej časti charakteristiky sú bodmi nestabilnej prevádzky. Hranicou zón stabilnej a nestabilnej prevádzky je charakteristika maximálneho výkonu.
STATICKÁ STABILITA Ak sa výkon generátora zvýši v bode b, potom dôjde k nadmernému brzdnému momentu, ktorý spôsobí, že sa pracovný bod systému turbína-generátor posunie do bodu a. Bod a výkonovej charakteristiky je teda bodom stabilnej rovnováhy momentov turbíny a generátora, bod b je bodom nestabilnej rovnováhy. Podobne všetky body ležiace na rastúcej časti výkonovej charakteristiky sú bodmi stabilnej prevádzky sústavy a body ležiace na klesajúcej časti charakteristiky sú bodmi nestabilnej prevádzky. Hranicou zón stabilnej a nestabilnej prevádzky je charakteristika maximálneho výkonu.
 STATICKÁ STABILITA Znakom statickej stability elektrického systému je teda znak prírastku výkonu k prírastku uhla. Ak je systém stabilný, ak je tento pomer záporný, potom je nestabilný. Prejdením na limit získame kritérium stability pre najjednoduchší systém: . Zvýšenie výkonu turbíny z hodnoty na (obr. 11. 2, a) vedie k zvýšeniu uhla rotora z hodnoty na hodnotu a k zníženiu statickej stability.
STATICKÁ STABILITA Znakom statickej stability elektrického systému je teda znak prírastku výkonu k prírastku uhla. Ak je systém stabilný, ak je tento pomer záporný, potom je nestabilný. Prejdením na limit získame kritérium stability pre najjednoduchší systém: . Zvýšenie výkonu turbíny z hodnoty na (obr. 11. 2, a) vedie k zvýšeniu uhla rotora z hodnoty na hodnotu a k zníženiu statickej stability.
 STATICKÁ STABILITA Je zrejmé, že v prevádzkových podmienkach by generátor nemal byť zaťažený na maximálnu kapacitu, pretože akákoľvek malá odchýlka v parametroch režimu môže viesť k strate synchronizácie a prechodu generátora do asynchrónneho režimu. V prípade výskytu nepredvídaných porúch je zabezpečená rezerva na zaťaženie generátora charakterizovaná faktorom statickej stability. (11.3)
STATICKÁ STABILITA Je zrejmé, že v prevádzkových podmienkach by generátor nemal byť zaťažený na maximálnu kapacitu, pretože akákoľvek malá odchýlka v parametroch režimu môže viesť k strate synchronizácie a prechodu generátora do asynchrónneho režimu. V prípade výskytu nepredvídaných porúch je zabezpečená rezerva na zaťaženie generátora charakterizovaná faktorom statickej stability. (11.3)
 STATICKÁ STABILITA Smernice pre stabilitu elektrizačných sústav predpisujú, že v normálnych režimoch elektrizačných sústav by mala byť rezerva stability prenosu energie spájajúcej stanicu s prípojnicami elektrizačnej sústavy aspoň 20 % v normálnom režime a 8 % v krátkosti. -termínový pohavarijný režim. V najťažších režimoch, v ktorých zvýšenie tokov energie pozdĺž tratí umožňuje znížiť obmedzenia spotrebiteľov alebo straty vodných zdrojov, je povolené zníženie rozpätia stability na 8 %. Krátkodobé znamená pohavarijné režimy v trvaní do 40 minút, počas ktorých musí regulátor obnoviť normálnu hranicu statickej stability.
STATICKÁ STABILITA Smernice pre stabilitu elektrizačných sústav predpisujú, že v normálnych režimoch elektrizačných sústav by mala byť rezerva stability prenosu energie spájajúcej stanicu s prípojnicami elektrizačnej sústavy aspoň 20 % v normálnom režime a 8 % v krátkosti. -termínový pohavarijný režim. V najťažších režimoch, v ktorých zvýšenie tokov energie pozdĺž tratí umožňuje znížiť obmedzenia spotrebiteľov alebo straty vodných zdrojov, je povolené zníženie rozpätia stability na 8 %. Krátkodobé znamená pohavarijné režimy v trvaní do 40 minút, počas ktorých musí regulátor obnoviť normálnu hranicu statickej stability.
 Výkonová charakteristika generátora s výraznými pólmi Aby sme charakterizovali výkon stroja s výraznými pólmi, napíšeme výraz pre výstup činného výkonu do sústavy Vzhľadom na to, že prepíšeme do tvaru výraz pre výkon
Výkonová charakteristika generátora s výraznými pólmi Aby sme charakterizovali výkon stroja s výraznými pólmi, napíšeme výraz pre výstup činného výkonu do sústavy Vzhľadom na to, že prepíšeme do tvaru výraz pre výkon
 Výkonová charakteristika generátora s výraznými pólmi Z posledného výrazu vyplýva, že výkonová charakteristika generátora s výraznými pólmi obsahuje okrem hlavnej sínusovej zložky druhú zložku - druhú harmonickú zložku, ktorej amplitúda je úmerná rozdiel indukčných odporov u. Druhá harmonická posúva maximum výkonovej charakteristiky v smere zmenšovania uhla (obr. 11. 3). Prvá, hlavná časť závisí od veľkosti EMF, čo znamená, že generátor musí byť excitovaný. Druhá zložka nezávisí od budenia generátora, ukazuje, že generátor s výraznými pólmi môže produkovať činný výkon bez budenia v dôsledku jalového krútiaceho momentu, ale tento činný výkon závisí od sínusu dvojitého uhla.
Výkonová charakteristika generátora s výraznými pólmi Z posledného výrazu vyplýva, že výkonová charakteristika generátora s výraznými pólmi obsahuje okrem hlavnej sínusovej zložky druhú zložku - druhú harmonickú zložku, ktorej amplitúda je úmerná rozdiel indukčných odporov u. Druhá harmonická posúva maximum výkonovej charakteristiky v smere zmenšovania uhla (obr. 11. 3). Prvá, hlavná časť závisí od veľkosti EMF, čo znamená, že generátor musí byť excitovaný. Druhá zložka nezávisí od budenia generátora, ukazuje, že generátor s výraznými pólmi môže produkovať činný výkon bez budenia v dôsledku jalového krútiaceho momentu, ale tento činný výkon závisí od sínusu dvojitého uhla.

 Výkonová charakteristika generátora s vyčnievajúcimi pólmi Amplitúda výkonovej charakteristiky sa zvyšuje v porovnaní s charakteristikou stroja bez vyčnievajúcich pólov. Toto zvýšenie sa však objavuje iba pri malých hodnotách EMF (keď sú prvá a druhá zložka rovnakého rádu). Za normálnych podmienok je amplitúda druhej harmonickej 10 - 15% základnej harmonickej a nemá výrazný vplyv na výkonovú charakteristiku.
Výkonová charakteristika generátora s vyčnievajúcimi pólmi Amplitúda výkonovej charakteristiky sa zvyšuje v porovnaní s charakteristikou stroja bez vyčnievajúcich pólov. Toto zvýšenie sa však objavuje iba pri malých hodnotách EMF (keď sú prvá a druhá zložka rovnakého rádu). Za normálnych podmienok je amplitúda druhej harmonickej 10 - 15% základnej harmonickej a nemá výrazný vplyv na výkonovú charakteristiku.
 Výkonová charakteristika generátora s AVR Predpokladajme, že generátor na obr. 11.1 systém regulácie napätia je vypnutý. Zostavme vektorový diagram uvažovaného systému so zvýraznením napätia na generátorových zberniciach v ňom (obr. 11. 4, a). Závisí to od poklesu napätia na vonkajšom odpore systému: kde sú systémy. vonkajší odpor
Výkonová charakteristika generátora s AVR Predpokladajme, že generátor na obr. 11.1 systém regulácie napätia je vypnutý. Zostavme vektorový diagram uvažovaného systému so zvýraznením napätia na generátorových zberniciach v ňom (obr. 11. 4, a). Závisí to od poklesu napätia na vonkajšom odpore systému: kde sú systémy. vonkajší odpor

 Výkonová charakteristika generátora s AVR Vektor napätia na zberniciach generátora rozdeľuje vektor poklesu napätia na dve časti úmerné indukčným reaktanciám a. Zvýšme prenášaný činný výkon o a tým uhol o. To spôsobí zmenu jalového výkonu dodávaného do systému. Aby sme získali závislosť jalového výkonu od uhla, napíšeme výraz nasledujúci z vektorového diagramu znázorneného na obr. 11.1, v
Výkonová charakteristika generátora s AVR Vektor napätia na zberniciach generátora rozdeľuje vektor poklesu napätia na dve časti úmerné indukčným reaktanciám a. Zvýšme prenášaný činný výkon o a tým uhol o. To spôsobí zmenu jalového výkonu dodávaného do systému. Aby sme získali závislosť jalového výkonu od uhla, napíšeme výraz nasledujúci z vektorového diagramu znázorneného na obr. 11.1, v
 Výkonová charakteristika generátora s ARV Vynásobením ľavej a pravej časti poslednej rovnosti dostaneme. Vyjadrením z posledného vzťahu dostaneme výraz pre jalový výkon vydaný generátorom z uhla: .
Výkonová charakteristika generátora s ARV Vynásobením ľavej a pravej časti poslednej rovnosti dostaneme. Vyjadrením z posledného vzťahu dostaneme výraz pre jalový výkon vydaný generátorom z uhla: .
 Výkonová charakteristika generátora s AVR Z diagramu vyplýva, že zväčšenie uhla spôsobuje pokles napätia na zberniciach generátora. Predpokladajme, že automatický regulátor budenia je zapnutý a riadi napätie. S poklesom tohto napätia regulátor zvyšuje budiaci prúd a s ním aj EMF, kým sa neobnoví predchádzajúca hodnota napätia. Vzhľadom na ustálené prevádzkové režimy generátora s AVR pri rôznych hodnotách uhla sa často predpokladá, že napätie je konštantné. Na obr. 11. 4, b znázorňuje skupinu charakteristík skonštruovaných pre rôzne hodnoty EMF.
Výkonová charakteristika generátora s AVR Z diagramu vyplýva, že zväčšenie uhla spôsobuje pokles napätia na zberniciach generátora. Predpokladajme, že automatický regulátor budenia je zapnutý a riadi napätie. S poklesom tohto napätia regulátor zvyšuje budiaci prúd a s ním aj EMF, kým sa neobnoví predchádzajúca hodnota napätia. Vzhľadom na ustálené prevádzkové režimy generátora s AVR pri rôznych hodnotách uhla sa často predpokladá, že napätie je konštantné. Na obr. 11. 4, b znázorňuje skupinu charakteristík skonštruovaných pre rôzne hodnoty EMF.

 Výkonová charakteristika generátora s AVR Ak vezmeme bod a ako začiatočný bod normálneho režimu, tak na zvýšenie výkonu (sprevádzané zväčšením uhla) budú body nových ustálených režimov určené prechodom. z jednej charakteristiky do druhej v súlade s vektorovým diagramom (obr. 11. 4, a) . Spojením bodov vytvorených na rôznych úrovniach budenia získame vonkajšiu charakteristiku generátora. Zvyšuje sa dokonca v
Výkonová charakteristika generátora s AVR Ak vezmeme bod a ako začiatočný bod normálneho režimu, tak na zvýšenie výkonu (sprevádzané zväčšením uhla) budú body nových ustálených režimov určené prechodom. z jednej charakteristiky do druhej v súlade s vektorovým diagramom (obr. 11. 4, a) . Spojením bodov vytvorených na rôznych úrovniach budenia získame vonkajšiu charakteristiku generátora. Zvyšuje sa dokonca v
 Výkonová charakteristika generátora s AVR Proporcionálne regulátory (RPT) so ziskom 50 ... 100 umožňujú udržiavať napätie na zberniciach generátora takmer konštantné. Zosilnenie je definované ako pomer počtu budiacich jednotiek a jednotiek napätia generátora. Ale maximálny vysielací výkon takéhoto generátora, vybaveného AVR s takým ziskom, je o niečo vyšší ako maximálny výkon neregulovaného generátora.
Výkonová charakteristika generátora s AVR Proporcionálne regulátory (RPT) so ziskom 50 ... 100 umožňujú udržiavať napätie na zberniciach generátora takmer konštantné. Zosilnenie je definované ako pomer počtu budiacich jednotiek a jednotiek napätia generátora. Ale maximálny vysielací výkon takéhoto generátora, vybaveného AVR s takým ziskom, je o niečo vyšší ako maximálny výkon neregulovaného generátora.
 Výkonová charakteristika generátora s AVR Je to spôsobené tým, že so zvýšením výkonu v určitom bode výkonovej charakteristiky (bod 3 na obr. 11. 5, a) sa generátor začne samovoľne kývať, t.j. periodické kmity rotora so zvyšujúcou sa amplitúdou vedú k vypadnutiu generátora zo synchronizácie. Preto sa proporcionálne regulátory nesnažia podporovať, čo umožňuje mierne klesať so zvyšujúcim sa zaťažením. V tomto prípade je maximálny výkon, ktorý možno dosiahnuť, oveľa vyšší ako výkon (obr. 11. 5, b).
Výkonová charakteristika generátora s AVR Je to spôsobené tým, že so zvýšením výkonu v určitom bode výkonovej charakteristiky (bod 3 na obr. 11. 5, a) sa generátor začne samovoľne kývať, t.j. periodické kmity rotora so zvyšujúcou sa amplitúdou vedú k vypadnutiu generátora zo synchronizácie. Preto sa proporcionálne regulátory nesnažia podporovať, čo umožňuje mierne klesať so zvyšujúcim sa zaťažením. V tomto prípade je maximálny výkon, ktorý možno dosiahnuť, oveľa vyšší ako výkon (obr. 11. 5, b).
 Výkonová charakteristika generátora s AVR Výkonová charakteristika pri zosilnení rádovo 20 ... 40 má približne rovnaké maximum ako charakteristika generátora pri. Preto môže byť generátor vybavený proporcionálnym regulátorom zastúpený v substitučných obvodoch s prechodným EMF a odporom.
Výkonová charakteristika generátora s AVR Výkonová charakteristika pri zosilnení rádovo 20 ... 40 má približne rovnaké maximum ako charakteristika generátora pri. Preto môže byť generátor vybavený proporcionálnym regulátorom zastúpený v substitučných obvodoch s prechodným EMF a odporom.

 Výkonová charakteristika generátora s AVR
Výkonová charakteristika generátora s AVR
 Výkonová charakteristika generátora s AVR
Výkonová charakteristika generátora s AVR
 Výkonová charakteristika generátora s AVR Regulátor začne pracovať až vtedy, keď odchýlka napätia v jednom alebo druhom smere dosiahne určitú hodnotu. Pri menších odchýlkach ležiacich v mŕtvom pásme regulátor nefunguje. Hraniciam mŕtvej zóny zodpovedajú dve vonkajšie charakteristiky (obr. 11. 6).
Výkonová charakteristika generátora s AVR Regulátor začne pracovať až vtedy, keď odchýlka napätia v jednom alebo druhom smere dosiahne určitú hodnotu. Pri menších odchýlkach ležiacich v mŕtvom pásme regulátor nefunguje. Hraniciam mŕtvej zóny zodpovedajú dve vonkajšie charakteristiky (obr. 11. 6).

 Výkonová charakteristika generátora s AVR Nech bod a zodpovedá počiatočnému režimu. Pri malej poruche, ktorá spôsobuje zväčšenie uhla, sa napätie na zberniciach generátora znižuje, ale regulátor nefunguje, kým odchýlka uhla neleží v mŕtvom pásme. S nárastom uhla na hriadeli generátora vzniká zrýchľujúci sa nadbytočný moment, ktorý spôsobuje jeho ďalšie zvýšenie. Keď uhol pohybu prekročí hranicu mŕtvej zóny (bod b), ovládač začne pracovať.
Výkonová charakteristika generátora s AVR Nech bod a zodpovedá počiatočnému režimu. Pri malej poruche, ktorá spôsobuje zväčšenie uhla, sa napätie na zberniciach generátora znižuje, ale regulátor nefunguje, kým odchýlka uhla neleží v mŕtvom pásme. S nárastom uhla na hriadeli generátora vzniká zrýchľujúci sa nadbytočný moment, ktorý spôsobuje jeho ďalšie zvýšenie. Keď uhol pohybu prekročí hranicu mŕtvej zóny (bod b), ovládač začne pracovať.
 Výkonová charakteristika generátora s AVR Zvýšenie budiaceho prúdu, a tým aj EMF generátora, spomaľuje pokles výkonu a posúva pracovný bod na výkonovú charakteristiku, zodpovedajúcu veľkému EMF (body c, d). V bode e sa prebytočný výkon rovná nule, ale v dôsledku zotrvačnosti rotora sa uhol naďalej zväčšuje. V bode f sa uhol stane maximálnym, po ktorom sa začne zmenšovať.
Výkonová charakteristika generátora s AVR Zvýšenie budiaceho prúdu, a tým aj EMF generátora, spomaľuje pokles výkonu a posúva pracovný bod na výkonovú charakteristiku, zodpovedajúcu veľkému EMF (body c, d). V bode e sa prebytočný výkon rovná nule, ale v dôsledku zotrvačnosti rotora sa uhol naďalej zväčšuje. V bode f sa uhol stane maximálnym, po ktorom sa začne zmenšovať.
 Výkonová charakteristika generátora s AVR Po prejdení bodu g na vonkajšej charakteristike začne regulátor znižovať napätie budiča a výkonová krivka pretína internú výkonovú charakteristiku v opačnom smere. V dôsledku vnútornej nestability teda dochádza k netlmenému kmitaniu rotora generátora (uhlové kmity). Amplitúda týchto kmitov závisí od šírky mŕtvej zóny regulátora. Spolu s uhlom kolíše napätie, výkon a prúd generátora. Takéto výkyvy sťažujú riadenie činnosti generátora a vyžadujú opustenie jeho prevádzky v takýchto režimoch.
Výkonová charakteristika generátora s AVR Po prejdení bodu g na vonkajšej charakteristike začne regulátor znižovať napätie budiča a výkonová krivka pretína internú výkonovú charakteristiku v opačnom smere. V dôsledku vnútornej nestability teda dochádza k netlmenému kmitaniu rotora generátora (uhlové kmity). Amplitúda týchto kmitov závisí od šírky mŕtvej zóny regulátora. Spolu s uhlom kolíše napätie, výkon a prúd generátora. Takéto výkyvy sťažujú riadenie činnosti generátora a vyžadujú opustenie jeho prevádzky v takýchto režimoch.
 Výkonová charakteristika generátora s AVR o. Stabilnú prevádzku generátora je možné zabezpečiť pri použití zložitejších regulátorov budenia, ktoré reagujú nielen na zmeny napätia, ale aj na rýchlosť a rovnomerné zrýchlenie zmien napätia. Takéto regulátory sa nazývajú regulátory silného pôsobenia. Silné akčné regulátory poskytujú konštantné napätie na svorkách generátora (bez vlastného kývania), preto môže byť generátor vybavený takýmto regulátorom pri výpočte statickej stability v ekvivalentnom obvode reprezentovaný zdrojom konštantného napätia s nulovým odporom.
Výkonová charakteristika generátora s AVR o. Stabilnú prevádzku generátora je možné zabezpečiť pri použití zložitejších regulátorov budenia, ktoré reagujú nielen na zmeny napätia, ale aj na rýchlosť a rovnomerné zrýchlenie zmien napätia. Takéto regulátory sa nazývajú regulátory silného pôsobenia. Silné akčné regulátory poskytujú konštantné napätie na svorkách generátora (bez vlastného kývania), preto môže byť generátor vybavený takýmto regulátorom pri výpočte statickej stability v ekvivalentnom obvode reprezentovaný zdrojom konštantného napätia s nulovým odporom.
Mnoho základných otázok elektromechanických prechodových procesov sa zvažuje pomocou jednoduchých schém elektrických energetických systémov. Tieto schémy sú tzv modely energetických systémov, okrem toho sa slovo „model“ často vynecháva, ale je nevyhnutne implikované, pretože akákoľvek schéma energetického systému je v podstate modelom tohto energetického systému.
Najbežnejšie jednostrojové, dvojstrojové a trojstrojové modely energetických systémov. Protozoa z ktorých je model energetického systému s jedným strojom, ktorý má aj meno model auto-pneumatiky.
Najjednoduchší (jednostrojový) model energetického systému je reprezentovaný jedinou vzdialenou elektrárňou (ekvivalentným generátorom) pracujúcim prostredníctvom transformátorových spojení a elektrického vedenia paralelne s generátormi výkonného koncentrovaného energetického systému, ktorý je taký výkonný, že jeho prijímacie zbernice sú odkazované ako nekonečné výkonové zbernice (CBM). Charakteristickými znakmi SHBM sú konštantné modulo napätie (U= const) a konštantná frekvencia (o 0 = konštanta tohto napätia. Pri použití CBM sa spravidla nezobrazujú zodpovedajúce napájacie systémy v elektrických obvodoch. V ekvivalentných obvodoch sa ako prvok zobrazujúci pneumatiky používajú pneumatiky s nekonečným výkonom výkonný systém.
Zvážte procesy v systéme napájania s jedným strojom (obr. 1.2, a), v ktorom zo vzdialeného neregulovaného generátora G cez transformátory T | a T 2 a jednookruhovým elektrickým vedením L bude prenášaný činný výkon R pri prúde / do energetického systému C. Energia sa dodáva do prijímacích zberníc energetického systému, odoberaná pre pneumatiky s nekonečným výkonom. Stanovme hlavné vzťahy medzi parametrami režimu jednostrojového energetického systému, ktoré sú potrebné na analýzu procesov.
Pre zjednodušenie predpokladajme, že aktívne odpory a celkové vodivosti všetkých prvkov systému sú rovné nule (r = 0; g = 0; b= 0) a zostavte ekvivalentný obvod. Za týchto predpokladov má náhradný obvod tvar reťazca indukčných odporov (obr. 1.2, Obr. b) zapojený medzi dva zdroje elektromotorických síl (EMF). zdroj E je modelovaný synchrónny EMF generátora, zdroj U- napätie na SHBM.
Ryža. 1.2. Model energetického systému s jedným strojom
Ekvivalentná indukčná reaktancia X v ekvivalentnom ekvivalentnom obvode (pozri obr. 1.2, c) je definovaný ako súčet indukčných reaktancií:
Vzťah medzi mocou R, modulov EÚ vektory Eq, U a uhol 5 medzi nimi je určený pomocou vektorového diagramu napätí, EMF a prúdov (obr. 1.3) pôsobiacich v ekvivalentnom ekvivalentnom obvode.
Diagram zvýrazňuje aktívnu a reaktívnu / p zložky prúdu / a podľa toho zobrazuje pozdĺžnu Ljx a priečne I^jx komponenty poklesu napätia / jx pri ekvivalentnom odpore X. EMF E q f a napätie (Uf sú reprezentované fázovými veličinami.
Z diagramu vyplýva, že modul priečneho komponentu / jx bude určená pomerom
Vynásobením oboch častí tejto rovnosti 3?/f/x sa dostaneme kam EÚ- moduly zodpovedajúcich lineárnych veličín.

Ryža. 1.3.
energetických systémov
Vzhľadom na to, že trojfázový výkon je definovaný ako P = 3?/f/a, predstavujeme poslednú rovnosť vo forme závislosti
O Eq - konšt., U= konštantná závislosť (1,22) je
sínusová funkcia činného výkonu generátora z uhla. Grafické znázornenie tejto funkcie je tzv uhlová charakteristika činného výkonu generátora. Tento názov je zachovaný pre grafiku závislostí. P(b) a v zložitejších prípadoch napríklad so zmenou parametrov EÚ alebo keď generátor pracuje ako súčasť komplexného energetického systému.
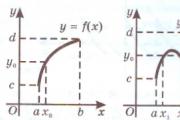
Na zváženie konceptu statickej stability je potrebné grafické znázornenie segmentu funkcie R( b) v rámci kladného polcyklu sínusoidy (obr. 1.4).
Uhlová charakteristika je miesto bodov zodpovedajúcich všetkým možným hodnotám výkonu prenášaného z generátora. V ustálenom stave sa z generátora prenáša iba jedno špecifické množstvo výkonu, ktoré zodpovedá konkrétnej hodnote uhla. Táto sila P 0 rovná výkonu turbíny R t, v dôsledku čoho si turbína, hriadeľ a rotor generátora zachovávajú rovnomerný rotačný pohyb.

Ryža. 1.4.
V ustálenom stave teda na hriadeľ pohonnej jednotky pôsobia dva rovnaké absolútne hodnoty, ale opačného smeru: zrýchľujúci mechanický moment turbíny a spomaľovací elektromagnetický moment generátora. Analógy týchto momentov používaných v elektroenergetike sú mechanická sila turbíny RT a elektrický výkon generátora P 0(pozri obr. 1.4). Odchýlka ktoréhokoľvek z týchto výkonov (momentov) od ustálenej hodnoty sa prejaví vo forme nerovnováhy výkonov (momentov) AP = PT - P na hriadeli, pod vplyvom ktorého rotor generátora zrýchli alebo spomalí svoj rotačný pohyb. V súlade s tým sa hodnota uhla 5 zvýši alebo zníži.
Ako je vidieť na obr. 1.4 sú dva priesečníky (a a b) charakteristiky turbíny Rt a uhlové charakteristiky R( 5) generátor. Vzniká otázka o možnosti stabilnej prevádzky v každom z týchto bodov.
Predpokladajme, že ustálený stav generátora je charakterizovaný bodom a. V prípade náhodného zvýšenia výkonu generátora o AR a a zodpovedajúce zväčšenie uhla o hodnotu D8 (((poruší sa rovnosť momentov pôsobiacich na hriadeľ a brzdný elektromagnetický moment generátora bude väčší ako akceleračný moment turbíny. Pôsobením nadmerný brzdný moment, rotor sa začne spomaľovať, sprevádzaný poklesom uhla a činného výkonu generátora privádzaného do siete. Proces bude pokračovať, kým sa neobnoví rovnosť akceleračného a spomaľovacieho momentu, tj. , kým sa systém nevráti do pôvodného režimu, charakterizovaného bodom a.
Teda pri práci na bode a režim elektrizačnej sústavy je staticky stabilný, keďže pôsobením malých porúch je sústava schopná vrátiť sa do pôvodného stavu.
Pri práci na bode b mierne zvýšenie uhla je sprevádzané znížením aktívneho výkonu dodávaného do siete. V prípade náhodného prechodu do bodu b" výkon turbíny bude o niečo väčší ako výkon generátora AP h . V súlade s tým bude zrýchľovací mechanický krútiaci moment turbíny väčší ako brzdný elektromagnetický krútiaci moment generátora, v dôsledku čoho sa rotor generátora zrýchli. To povedie k zvýšeniu uhla 8 a v dôsledku toho k zvýšeniu nerovnováhy výkonov (krútiacich momentov) AR.Ďalší vývoj procesu má lavínovitý charakter a končí vypadnutím zo synchronizácie vzdialeného generátora s generátormi prijímacej energetickej sústavy.
Teda stav elektrizačnej sústavy zodpovedajúci bodu b, je nestabilná, aj keď v tomto bode, ako aj v bode a, brzdné a akceleračné momenty pôsobiace na hriadeľ rotora generátora sú rovnaké.
V praktických výpočtoch sa široko používajú kritériá (podmienky), pri ktorých sa udržiava statická stabilita elektrizačnej sústavy. Jedno z týchto kritérií sa dá ľahko stanoviť pomocou hlbšej analýzy stabilných a nestabilných režimov. Pokračujúc v úvahách poznamenávame, že všetky body uhlovej charakteristiky umiestnené na jej vzostupnej vetve zodpovedajú stabilným režimom uvažovaného energetického systému. Krajný bod rozlišuje vzostupnú a zostupnú vetvu charakteristiky, a preto je hraničným bodom. Je všeobecne akceptované pripisovať tento bod oblasti stabilných režimov.
V ktoromkoľvek bode vzostupnej vetvy uhlovej charakteristiky náhodne sa vyskytujúca nerovnováha výkonu AR a jemu zodpovedajúci prírastok uhla D5 majú rovnaké znamienka, ich pomer je kladný a možno ho považovať za formálny znak stability
Pri prechode na infinitezimálne prírastky a pri zohľadnení krajného bodu uhlovej charakteristiky, kde dP/d8 = 0, táto funkcia je zapísaná ako
a používa sa ako praktické kritérium pre statickú stabilitu jednostrojového energetického systému.
Derivát dP/d8 volal synchronizačný výkon. Dá sa vypočítať pomocou vzorca
Rovnosti zodpovedá obmedzujúci režim elektrizačnej sústavy podľa podmienok statickej stability
V tomto režime je limitný uhol 5 pr \u003d 90 ° a limit, to znamená maximálny možný prenášaný výkon R m definovaný ako
Je zrejmé, že v prevádzkových podmienkach by generátor nemal byť zaťažený na maximálnu kapacitu. R m, pretože akákoľvek malá odchýlka parametrov režimu môže viesť k strate synchronizácie a prechodu generátora do asynchrónneho režimu. V prípade výskytu nepredvídaných porúch je poskytnutá rezerva na zaťaženie generátora, ktorá sa vyznačuje faktor statickej stability
Smernice pre udržateľnosť energetických systémov predpisujú, že za normálnych podmienok je rezerva zodpovedajúca faktoru K st > dvadsať %. V najťažších režimoch, v ktorých zvýšenie toku energie pozdĺž vedení umožňuje znížiť obmedzenie spotrebiteľov alebo stratu vodných zdrojov, je povolené znížiť rezervu stability na K sg> 8 %. V krátkodobých režimoch po nehode sa musí poskytnúť aj rezerva K st> 8 %. Krátkodobými núdzovými režimami sa v tomto prípade rozumejú núdzové režimy v trvaní do 40 minút, počas ktorých musí regulátor obnoviť normálnu hranicu statickej stability.
Svetlana Furshtakova Synopsa hry na hranie rolí v strednej skupine "Kaviareň" 1. Úlohy: 1. Pokračovať v oboznamovaní detí s ...

Sexsymbol ruskej scény, bývalý člen skupiny VIA Gra a jednoducho krásna Vera Brežneva odhaľuje tajomstvá ...
Ciele hodiny: Vzdelávacie: formovať poznatky o novej téme v súlade s programovým materiálom; preskúmať...

Špeciálnymi vizuálnymi rozdielmi sú odtlačky vŕbových prútov po stranách hlavy, je to spôsobené zberom hotovej srvátky v...

Rastlina zlaté fúzy, známa aj ako kalisia voňavá, našla široké uplatnenie v ľudovom liečiteľstve. Verí sa, že...

Ako propagovať svoju firmu: pomocou internetu + propagácia pomocou videa + tvorba vizitiek a letákov + 5...

Pre správnu výsadbu, starostlivosť a umiestnenie weigely v záhrade nezabudnite, že weigela: dobre zakoreňuje na ...

Plnené palacinky s mletým mäsom sú výdatným jedlom pre celú rodinu. Tenký, beztiažový základ v spojení so šťavnatým...

V kuracích krídelkách nie je veľa mäsa. Napriek tomu ich mnohí gurmáni milujú. Ak sú krídla správne...

Pšeničná kaša je lacný a veľmi zdravý produkt. Aby to bolo chutné, potrebujete vedieť niekoľko ...

Ahoj! Dnes chcem hovoriť o tom, ako pripraviť paradajkový dresing na zimu na cestoviny....

Predstavte si veľký kus ošľahaného a obaľovaného mäsa, šťavnatého zvnútra a chrumkavého zvonku,...

Ponúkame nahradiť obvyklé klobásové sendviče tým najroztomilejším a najzaujímavejším občerstvením. Ruže z...

Výborným chudým (a tiež diétnym) snackom je pasta z chudých fazúľ. Obsahuje veľa bielkovín a...

Spravidla sú tieto orgány životne dôležité. Existuje zoznam srdcových chorôb v prítomnosti ...

Dospelý bičíkovec v ľudskom hrubom čreve objavený počas kolonoskopickej epidemiológie po celom svete...