 , आरपीएम
, आरपीएमवर्तमान और वोल्टेज के लिए बिजली की गणना
जैसा कि आप जानते हैं, विद्युत वोल्टेज का अपना उपाय होना चाहिए, जो प्रारंभ में उस मूल्य से मेल खाता है जो ...
एसिंक्रोनस इंजन की प्रॉपर्टी शुरू करना विशेष रूप से रोटर डिवाइस पर, इसके डिजाइन की विशिष्टताओं पर निर्भर करता है।
एक एसिंक्रोनस मोटर शुरू करने के साथ मशीन की एक क्षणिक प्रक्रिया होती है, जो रोटर के संक्रमण को एक समान स्थिति से एक समान रोटेशन की स्थिति में जोड़ती है, जिसमें मोटर टोक़ मशीन के शाफ्ट पर प्रतिरोध बलों के क्षण को संतुलित करता है।
जब एक एसिंक्रोनस मोटर शुरू हो जाती है, तो मुख्य आपूर्ति से विद्युत ऊर्जा की बढ़ती खपत होती है, जो न केवल शाफ्ट पर लागू ब्रेकिंग टोक़ पर काबू पाने और प्रेरण मोटर में नुकसान को कवर करने के लिए खर्च की जाती है, बल्कि उत्पादन इकाई के चलते लिंक को कुछ गतिशील ऊर्जा भेजने पर भी खर्च की जाती है। इसलिए, एसिंक्रोनस मोटर शुरू करते समय एक बढ़ी टोक़ विकसित करना चाहिए।
के लिए एक चरण रोटर के साथ एसिंक्रोनस मोटर स्लिप एसपी = 1 के अनुरूप प्रारंभिक प्रारंभिक टोक़ रोटर सर्किट में पेश समायोज्य प्रतिरोधकों के सक्रिय प्रतिरोध पर निर्भर करता है।
अंजीर। 1. एक चरण रोटर के साथ एक तीन चरण एसिंक्रोनस मोटर की शुरूआत: रोटर सर्किट में प्रतिरोधकों के विभिन्न सक्रिय प्रतिरोधों पर पर्ची पर एक चरण रोटर के साथ मोटर के टोक़ के एक ग्राफ, प्रतिरोधकों को जोड़ने और रोटर सर्किट में त्वरण संपर्क बंद करने के लिए बी सर्किट।
तो, त्वरण यू 1, यू 2 के बंद संपर्कों पर, यानी बंद संपर्क के छल्ले के साथ एक एसिंक्रोनस मोटर शुरू करते समय, प्रारंभिक प्रारंभिक पल एमपी 1 = (0.5 -1.0) एमएन, और प्रारंभिक प्रारंभिक वर्तमान मैंएन = (4,5- 7) मैंश्रीऔर अधिक
घाव रोटर के साथ अतुल्यकालिक बिजली की मोटर के छोटे शुरू करने टोक़ उत्पादन लाइन और इसके बाद के त्वरण, और महत्वपूर्ण दबाव वर्तमान actuating मोटर घुमावदार का एक बढ़ा हीटिंग है, जो अपने दोष की आवृत्ति को सीमित करता है कारण होगा के लिए अपर्याप्त हो सकती है, और कम बिजली नेटवर्क अन्य रिसीवर के लिए अवांछनीय की ओर जाता है अस्थायी वोल्टेज ड्रॉप। कार्य परिस्थितियों को चलाने के लिए एक बड़े प्रारंभिक प्रवाह के साथ एक चरण रोटर के साथ एसिंक्रोनस मोटर के उपयोग को छोड़कर, ये परिस्थितियां कारण हो सकती हैं।

समायोज्य प्रतिरोधों लांचर बुलाया रोटर सर्किट का परिचय न केवल प्रारंभिक वर्तमान कम कर देता है, लेकिन यह भी शुरू कर टोक़, जो अधिकतम पल Mmax प्राप्त कर सकते हैं बढ़ जाती है (चित्र। 1, वक्र 3), यदि घाव रोटर के साथ महत्वपूर्ण पर्ची मोटर
रोंसीआर =(आर2" + आरडी ") / (एक्स 1 + एक्स 2") = 1,
जहाँआरडी " - मोटर रोटर घुमाव के चरण में प्रतिरोधी का सक्रिय प्रतिरोध, स्टेटर घुमाव के चरण में कम हो गया। शुरुआती प्रतिरोधी के सक्रिय प्रतिरोध में और वृद्धि अव्यवहारिक है, क्योंकि इससे शुरुआती प्रारंभिक टोक़ और स्लिप क्षेत्र एस\u003e 1 में अधिकतम पल का निकास बिंदु कमजोर होता है, जो रोटर के त्वरण की संभावना को समाप्त करता है।
एक चरण-रोटर के साथ मोटर शुरू करने के लिए प्रतिरोधकों के आवश्यक प्रतिरोध को प्रारंभ की आवश्यकताओं के आधार पर निर्धारित किया जाता है, जो आसान हो सकता है एमपी = (0.1 - 0.4)एमश्रीसामान्य अगर Mn - (0.5 - 0.75) एमऔर एमएन ≥ मी के साथ भारी।
क्षणिक प्रक्रिया की अवधि को कम करने और इंजन हीटिंग को कम करने के लिए उत्पादन इकाई के त्वरण के दौरान चरण-रोटर मोटर के साथ पर्याप्त रूप से बड़े टोक़ को बनाए रखने के लिए, प्रारंभिक प्रतिरोधकों के प्रतिरोध को धीरे-धीरे कम करना आवश्यक है। त्वरण एम (टी) के दौरान टोक़ में स्वीकार्य परिवर्तन विद्युत और यांत्रिक की स्थिति से निर्धारित होता है, सीमित शिखर टोक़ सीमा M\u003e 0,85Mmah, स्विचिंग पल M2 \u003e\u003e Mc (चित्र। 2), और त्वरण।
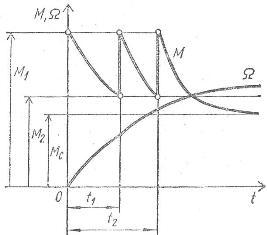
अंजीर। 2. एक चरण रोटर के साथ एक तीन चरण एसिंक्रोनस मोटर की स्टार्ट-अप विशेषताओं

स्विचिंग शुरू करने प्रतिरोधों बारी-बारी से contactors त्वरण Y1 स्विचन द्वारा प्रदान की जाती है, Y2, क्रमशः, त्वरण टोक़ एम के दौरान समय T1, T2 समय इंजन शुरू होने से गिना, जब की instants पर समय स्विच M2 के बराबर है। इसके कारण, पूरे स्टार्ट-अप में, सभी चोटी के क्षण समान होते हैं और सभी स्विचिंग पॉइंट एक-दूसरे के बराबर होते हैं।
Inom और वर्तमान I2, जो स्विचिंग पल M2\u003e Mc प्रदान करना चाहिए स्विचन - टोक़ और घाव रोटर के साथ प्रेरण मोटर की वर्तमान पारस्परिक रूप से जुड़े हुए हैं, यह रोटर त्वरण सीमा स्थापित करने के लिए शिखर वर्तमान I1 = (2,5 1,5) संभव है।
घाव रोटर के साथ अतुल्यकालिक मोटर्स को अक्षम करने से साधन हमेशा संचालित से जब रोटर सर्किट, सर्किट बंद कर दिया आदेश स्टेटर घुमावदार जो 3 में चरण के मूल्यांकन वोल्टेज अधिक हो सकता है के चरणों में वृद्धि की उपस्थिति से बचने के लिए - 4 बार, अगर इंजन बंद करने के समय रोटर सर्किट खुला होगा।
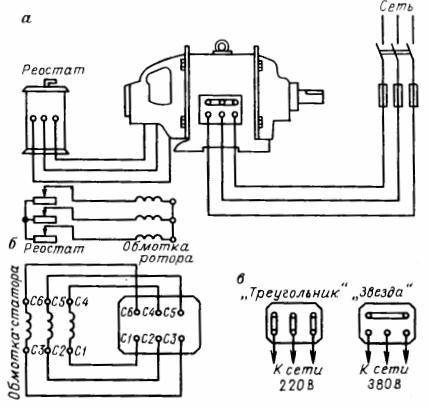
अंजीर। 3. एक चरण रोटर के साथ मोटर विंडिंग्स के वायरिंग आरेख: ए - मुख्य करने के लिए, बी - रोटर, सी - टर्मिनल बोर्ड पर।
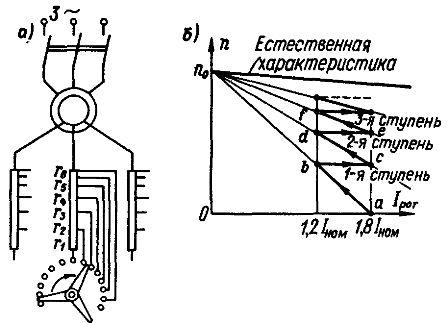
अंजीर। 4. एक चरण रोटर के साथ एक मोटर की स्टार्ट-अप: ए - स्विचिंग सर्किट, बी - यांत्रिक विशेषताओं
रूसी संघ के शिक्षा और विज्ञान मंत्रालय
संघीय शिक्षा एजेंसी
राज्य शैक्षिक संस्थान
उच्च व्यावसायिक शिक्षा
राष्ट्रीय शोध
इर्कुट्स स्टेट टेक्निकल यूनिवर्सिटी
विद्युत और विद्युत इंजीनियरिंग विभाग
प्रयोगशाला कार्य पर रिपोर्ट №11
अनुशासन "सामान्य विद्युत इंजीनियरिंग और इलेक्ट्रॉनिक्स"
अनुपालन
छात्र एसएमओ -11-1 ________ Kopytko I.V. 20.10.2012
एसोसिएट प्रोफेसर ई और ईटी ________ Kiryukhin यू.ए. __________
(हस्ताक्षर) अंतिम नाम और। (तिथि)
इर्कुटस्क 2012
कार्य उद्देश्य 3
1 संक्षिप्त सैद्धांतिक जानकारी 3
विद्युत स्थापना उपकरण 7
2 वर्कफ़्लो 7
3 गणना भाग 9
4 भूखंड 10
टेस्ट प्रश्न 14
संदर्भ 17
काम का उद्देश्य
एक गिलहरी-पिंजरे रोटर के साथ तीन चरण एसिंक्रोनस मोटर के संचालन के सिद्धांत और अपने विशेषताओं पर स्टेटर फाथ पर वोल्टेज के प्रभाव की जांच के साथ स्वयं को परिचित करें।
1 संक्षिप्त सैद्धांतिक जानकारी
1) उपकरण, एसिंक्रोनस मोटर का सिद्धांत।
एक एसिंक्रोनस मोटर एक एसी मशीन है। "एसिंक्रोनस" शब्द का अर्थ एक साथ नहीं है। यह समझा जाता है कि अतुल्यकालिक मोटर में चुंबकीय क्षेत्र के घूर्णन की आवृत्ति रोटर के घूर्णन की आवृत्ति से अलग होती है। मशीन के मुख्य भाग स्टेटर और रोटर हैं, जो एक दूसरे से एक समान वायु अंतराल से अलग होते हैं।
स्टेटर मशीन का एक निश्चित हिस्सा है। एडी वर्तमान घाटे को कम करने के लिए, इसका कोर 0.35-0.5 मिमी की मोटाई के साथ विद्युत स्टील की दबाई चादरों से बना है, जो एक दूसरे से वार्निश की परत से अलग होता है। स्टेटर चुंबकीय सर्किट के स्लॉट में एक घुमावदार रखा जाता है। तीन चरण के मोटर्स में, घुमाव तीन चरण है। नेटवर्क वोल्टेज की परिमाण के आधार पर घुमाव के चरणों को एक स्टार या त्रिकोण में जोड़ा जा सकता है।
रोटर इंजन का घूर्णन हिस्सा है। रोटर चुंबकीय कोर एक सिलेंडर मुद्रित विद्युत स्टील शीट से बना है। रोटर ढेर घुमावदार के स्लॉट में। घुमाने के प्रकार के आधार पर, असिंक्रोनस मोटरों के रोटर्स को लघु-सर्किट और चरण (पर्ची के छल्ले के साथ) में विभाजित किया जाता है। एक शॉर्ट-सर्किटेड विंडिंग एक असीमित तांबे या एल्यूमीनियम रॉड एक ही सामग्री के छल्ले ("गिलहरी पिंजरे") के सिरों से जुड़ी होती है।
चुंबकीय सर्किट के ग्रूव में चरण रोटर में तीन चरण घुमावदार रखा गया, जिसमें से चरण एक स्टार से जुड़े हुए हैं। घुमाव के चरणों के मुक्त सिरों मोटर शाफ्ट पर घुड़सवार तीन तांबा पर्ची के छल्ले से जुड़े हुए हैं। पर्ची के छल्ले एक दूसरे से और शाफ्ट से इन्सुलेट होते हैं। कार्बन या तांबा-ग्रेफाइट ब्रश रिंगों पर दबाए जाते हैं। रोटर घुमाव में पर्ची के छल्ले और ब्रश के माध्यम से, आप एक तीन चरण शुरू करने और rheostat समायोजित कर सकते हैं।
एक अतुल्यकालिक मोटर में यांत्रिक ऊर्जा में विद्युत ऊर्जा का रूपांतरण घुमावदार चुंबकीय क्षेत्र के माध्यम से किया जाता है। घूर्णन वाले चुंबकीय क्षेत्र की उत्तेजना के लिए आवश्यक शर्तें हैं:
स्टेटर कॉइल अक्षों की स्थानिक बदलाव;
स्टेटर कॉइल्स में धाराओं की समय शिफ्ट।
पहली आवश्यकता स्टेटर चुंबकीय कोर पर चुंबकीय कोयलों की उचित व्यवस्था से संतुष्ट है। घुमाव का चरण धुरी 120 डिग्री के कोण से अंतरिक्ष में ऑफसेट है। दूसरी स्थिति तीन चरण वोल्टेज प्रणाली के स्टेटर कॉइल में आवेदन करके प्रदान की जाती है।
जब तीन चरणों के नेटवर्क में मोटर चालू होती है, तो वही आवृत्ति और आयाम की धाराओं की एक प्रणाली स्टेटर घुमाव में स्थापित की जाती है, जिसमें आवधिक परिवर्तन एक दूसरे के सापेक्ष अवधि के 1/3 की देरी से किए जाते हैं।
घुमाव के चरणों के धाराएं एक चुंबकीय क्षेत्र बनाती हैं जो आवृत्ति, आरपीएम के साथ स्टेटर के सापेक्ष घूमती है, जिसे सिंक्रोनस मोटर रोटेशन फ्रीक्वेंसी कहा जाता है:

जहाँ  - मुख्य आवृत्ति, एचजे,
- मुख्य आवृत्ति, एचजे,
पी चुंबकीय क्षेत्र के ध्रुवों के जोड़े की संख्या है।
मानक मुख्य आवृत्ति के साथ  क्षेत्र रोटेशन आवृत्ति
क्षेत्र रोटेशन आवृत्ति
|
|
घूर्णन, क्षेत्र रोटर कंडक्टर को पार करता है, जिससे उनमें एक एएमएफ प्रेरित होता है। जब रोटर घुमाव बंद हो जाती है, तो ईएमएफ एक घूर्णनशील चुंबकीय क्षेत्र के साथ बातचीत करते समय धाराओं का कारण बनता है, घूर्णन विद्युत चुम्बकीय क्षण होता है। एसिंक्रोनस मशीन के मोटर मोड में रोटर के घूर्णन की गति हमेशा क्षेत्र के घूर्णन की गति से कम होती है, यानी। रोटर घूर्णन क्षेत्र के पीछे लेट गया। केवल इस स्थिति के तहत रोटर कंडक्टर में प्रेरित ईएमएफ है, वर्तमान प्रवाह और टोक़ बनाया गया है। चुंबकीय क्षेत्र से रोटर अंतराल की घटना को पर्ची कहा जाता है। चुंबकीय क्षेत्र से रोटर की अंतराल की डिग्री सापेक्ष पर्ची की परिमाण से विशेषता है:
जहां एन रोटर की गति, आरपीएम है
एसिंक्रोनस मोटर के लिए, पर्ची 1 (प्रारंभ) से 0 (निष्क्रिय) के करीब एक मान में भिन्न हो सकती है।
2 ) एसिंक्रोनस मोटर शुरू करना।
इंजन शुरू करते समय निम्नलिखित आवश्यकताओं को पूरा किया जाना चाहिए:
1. छोटे से शुरू वर्तमान;
2. पर्याप्त प्रारंभ टोक़;
3. गति में चिकनी वृद्धि;
4. आसान और किफायती शुरुआत।
रोटर डिजाइन (शॉर्ट-सर्किट या चरण), इंजन पावर, लोड की प्रकृति के आधार पर, शुरू करने के विभिन्न तरीके संभव हैं।
शॉर्ट-रोटर वाले इंजनों के लिए, सीधे शुरूआत और कम वोल्टेज के साथ शुरू होता है।
1. प्रत्यक्ष शुरुआत इस मामले में, स्टेटर घुमाव सीधे पूर्ण वोल्टेज पर नेटवर्क से जुड़ा हुआ है। डायरेक्ट स्टार्ट केवल कम और मध्यम शक्ति (15-20 किलोवाट तक) के शॉर्ट सर्किट रोटर के साथ असिंक्रोनस मोटर के लिए मान्य है। हालांकि, महत्वपूर्ण बिजली आपूर्ति के साथ, इस विधि को उच्च शक्ति मोटर (लगभग 50 किलोवाट तक) तक बढ़ाया जा सकता है।
2.
कम वोल्टेज शुरू करें
.
मोटर की शुरुआती धारा स्टेटर घुमाव के चरणों पर वोल्टेज के आनुपातिक है  इसलिए वोल्टेज को कम करना वर्तमान शुरू करने में इसी कमी के साथ। हालांकि, इस विधि प्रारंभिक प्रारंभिक टोक़ में कमी की ओर ले जाती है, जो स्टेटर घुमाव के चरणों पर वोल्टेज के वर्ग के समान होती है। टोक़ शुरू करने में महत्वपूर्ण कमी के कारण, यह प्रारंभिक विधि केवल शाफ्ट पर कम भार के लिए लागू होती है।
इसलिए वोल्टेज को कम करना वर्तमान शुरू करने में इसी कमी के साथ। हालांकि, इस विधि प्रारंभिक प्रारंभिक टोक़ में कमी की ओर ले जाती है, जो स्टेटर घुमाव के चरणों पर वोल्टेज के वर्ग के समान होती है। टोक़ शुरू करने में महत्वपूर्ण कमी के कारण, यह प्रारंभिक विधि केवल शाफ्ट पर कम भार के लिए लागू होती है।
वोल्टेज को कम करने के कई तरीके हैं। लॉन्च के समय:
ए) औसत शक्ति के एसिंक्रोनस इंजनों की आसान स्टार्ट-अप के साथ, जो आम तौर पर एक त्रिभुज के साथ घुमावदार स्टेटर के चरणों को जोड़ने के दौरान काम करते हैं, इन चरणों के टर्मिनल पर उन्हें एक स्टार में स्विच करके वोल्टेज कमी लागू करते हैं;
बी) स्टेटर घुमाव के चरणों के किसी भी प्रकार के कनेक्शन के लिए, वोल्टेज को स्टेटर घुमाव में श्रृंखला में जुड़े एक रिएक्टर (तीन चरण प्रेरक कॉइल) का उपयोग करके कम किया जा सकता है। चूंकि प्रतिरोधकों पर अनुक्रमिक स्विचिंग द्वारा स्टेटर पर वोल्टेज को कम करना कम आर्थिक है साथ ही, वे बहुत गर्म हो जाते हैं और विद्युत ऊर्जा के अतिरिक्त नुकसान होते हैं;
सी) हाई पावर मोटर्स के लिए, तीन चरण चरण-डाउन ऑटोट्रांसफॉर्मर के साथ वोल्टेज को कम करने की सलाह दी जाती है। यह विधि पिछले एक की तुलना में बेहतर है, लेकिन अधिक महंगा है। मोटर रोटर तेज होने और वर्तमान बूंदों के बाद, नेटवर्क की पूर्ण वोल्टेज स्टेटर घुमाव पर लागू होती है।
रोटर सर्किट में शुरुआती प्रतिरोधी पर स्विच करके एक चरण रोटर वाली मोटर शुरू की जाती है। प्रारंभिक रियोस्टैट शुरुआती प्रारंभिक प्रवाह के मूल्य को कम कर देता है और साथ ही प्रारंभिक प्रारंभिक टोक़ भी बढ़ाता है, जो अधिकतम टोक़ के करीब मूल्यों तक पहुंच सकता है। जैसे-जैसे इंजन बढ़ता है, प्रारंभिक रियोस्टेट आउटपुट होता है।
3) गति विनियमन और प्रेरण मोटर के उलट।
विनियमन शाफ्ट पर निरंतर भार पर गति में मजबूर परिवर्तन है। असीमित मोटर्स का नुकसान खराब समायोजन क्षमता है। लेकिन अभी भी विनियमन की कुछ संभावनाएं उपलब्ध हैं।
पर्ची सूत्र से, आप प्रेरण मोटर की रोटर गति की अभिव्यक्ति प्राप्त कर सकते हैं:

इस समानता से यह चलता है कि घूर्णन गति को निम्न तरीकों से बदला जा सकता है: स्टेटर वर्तमान की आवृत्ति को बदलकर , पी और पर्ची एस के ध्रुवों के जोड़े की संख्या। रोटर की गति आपूर्ति वोल्टेज को बदलकर समायोजित किया जा सकता है । इन तरीकों पर विचार करें।
स्टेटर वर्तमान की आवृत्ति को बदलकर विनियमन
.
सरल और भरोसेमंद तीन-चरण थाइरिस्टर आवृत्ति कन्वर्टर्स की उपस्थिति के कारण एसिंक्रोनस मोटर का फ्रीक्वेंसी नियंत्रण सबसे अधिक आशाजनक है, जिसमें औद्योगिक नेटवर्क और एसिंक्रोनस मोटर के बीच शामिल है। आवृत्ति समायोजित करते समय इंजन की गति को आसानी से बदला जा सकता है ताकि उसका अधिकतम मूल्य न्यूनतम से कम या सैकड़ों गुना अधिक हो।
ध्रुवों के जोड़े की संख्या को बदलकर विनियमन पी . मल्टी-स्पीड एसिंक्रोनस मोटर के ध्रुवों के जोड़े की संख्या को स्विच करना रोटर की गति का एक कदम नियंत्रण प्रदान करता है और यह आर्थिक है। यह मशीनों में स्टेटर घुमाव के एक विशेष डिजाइन के साथ प्रयोग किया जाता है जो अपने कॉइल्स को ध्रुव जोड़े की एक अलग संख्या में स्विच करने की अनुमति देता है, और जब कई वैकल्पिक रूप से स्विच किए गए विंडिंग्स स्टेटर चुंबकीय सर्किट के स्लॉट में रखे जाते हैं, उदाहरण के लिए, पी = 1 और पी = 2 ।
आपूर्ति वोल्टेज विनियमन
.
वोल्टेज को कम करने से रोटर की गति में कमी आती है। तनाव कम करें स्टेटर सर्किट rheostats, autotransformers या समायोज्य चोक से जुड़ा जा सकता है। इस विधि का उपयोग केवल निम्न-शक्ति इंजनों के लिए किया जाता है, क्योंकि वोल्टेज घटाने से अधिकतम मोटर टोक़ कम हो जाता है, जो वोल्टेज के वर्ग के समान होता है। अधिकतम टोक़ को कम करने से इंजन की स्थिरता मार्जिन कम हो जाती है। इसके अलावा, आवृत्ति नियंत्रण सीमा अपेक्षाकृत छोटी है।
उपरोक्त नियंत्रण विधियों को गिलहरी-पिंजरे प्रेरण मोटर्स पर लागू किया जाता है।
एक चरण रोटर के साथ मोटर्स के लिए, घूर्णन गति को पर्ची बदलकर नियंत्रित किया जाता है। इस अंत में, रोटर घुमाव में एक समायोजन rheostat शामिल है। समायोजन rheostat के प्रतिरोध में वृद्धि के साथ, पर्ची बढ़ जाती है और घूर्णन गति कम हो जाती है।
यह विधि गति में एक चिकनी परिवर्तन प्रदान करता है।
रोटर के घूर्णन की दिशा बदलने से उलट दिया जाता है। रिवर्स के लिए स्टेटर मोटर घुमाव के टर्मिनल पर दो तारों को स्वैप करना आवश्यक है।
एक चरण रोटर के साथ एक एसिंक्रोनस मोटर का शोध
उद्देश्य: एक चरण रोटर के साथ एसिंक्रोनस मोटर के डिजाइन के साथ खुद को परिचित करने के लिए। पर्ची बदलने, रिवर्सिंग द्वारा प्रारंभ, गति नियंत्रण की जांच करें। स्टार्ट-अप आरेख, ऑपरेटिंग, यांत्रिक और इंजन की विशेषताओं को समायोजित करें।
सामान्य जानकारी
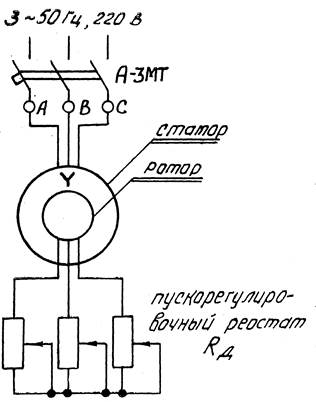
एक चरण रोटर (पर्ची के छल्ले वाली एक मोटर) के साथ एक असीमित मोटर, चित्रा 1 में दिखाया गया सर्किट आरेख, दो भागों में होता है: निश्चित भाग - स्टेटर और घूर्णन भाग - रोटर।
स्टेटर (Fig.2) एक फ्रेम (शरीर) (1) है, जो नींव पर चढ़ने के लिए पैर के साथ एक बेलनाकार कास्टिंग के रूप में लौह कास्टिंग से बना है। एक बैग (2) फ्रेम में दबाया जाता है। यह एक अलग खोखला सिलेंडर होता है, जिसमें विशेष इन्सुलेटिंग वार्निश, विद्युत स्टील की पतली चादरें होती हैं जिसमें आंतरिक सतह (3) के साथ मुद्रित ग्रूव होता है।
ग्रूव में तीन चरण स्टेटर घुमावदार रखा गया, जिसमें तीन समान चरण विंडिंग्स एक दूसरे के सापेक्ष घुमाए गए और 120 विद्युत डिग्री पर स्टेटर पैकेज की परिधि के साथ घूमते थे। घुमावदार और छोर की शुरुआत मशीन पैनल पर प्रदर्शित होती है।
छह निष्कर्षों की उपस्थिति से "स्टार" या "त्रिकोण" योजना के अनुसार स्टेटर विंडिंग्स को कनेक्ट करना संभव हो जाता है। एक तीन चरण बिजली की आपूर्ति टर्मिनल से जुड़ा हुआ है। असर ढाल बिस्तर के सिरों तक फैले हुए हैं, जिनमें से केंद्र रोटर शाफ्ट की गेंद बियरिंग्स स्थित है।
रोटर (चित्र 3) शाफ्ट (रोटर पैकेज) (1) पर दबाया गया एक सिलेंडर है, जो बाहरी सतह (2) के साथ मुद्रित ग्रूव के साथ एक विशेष इन्सुलेटिंग वार्निश के साथ लेपित अलग पतली लेपित विद्युत स्टील शीट से इकट्ठा होता है। ग्रूव में रोटर की तीन चरण घुमावदार रखी गई ![]() "स्टार" योजना के अनुसार घुमावदार और जुड़े हुए स्टेटर के रूप में बनाया गया।
"स्टार" योजना के अनुसार घुमावदार और जुड़े हुए स्टेटर के रूप में बनाया गया।
घुमावदार चरणों के चरणों की शुरुआत, खोखले शाफ्ट के अंदर बाहर निकाली गई और संपर्क के छल्ले से जुड़ी हुई (3)। रोटर की शील्ड पर, टर्मिनल से जुड़े तांबे-ग्रेफाइट ब्रश (4) के छल्ले पर चढ़ाया जाता है।

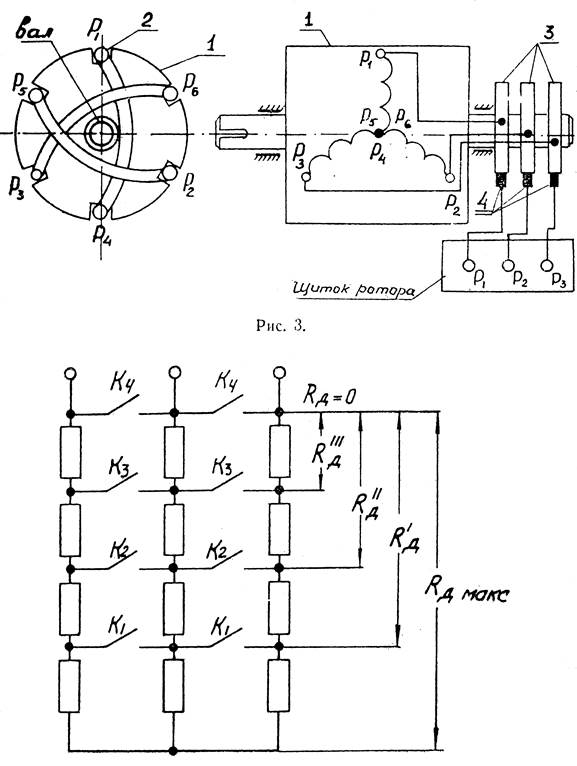
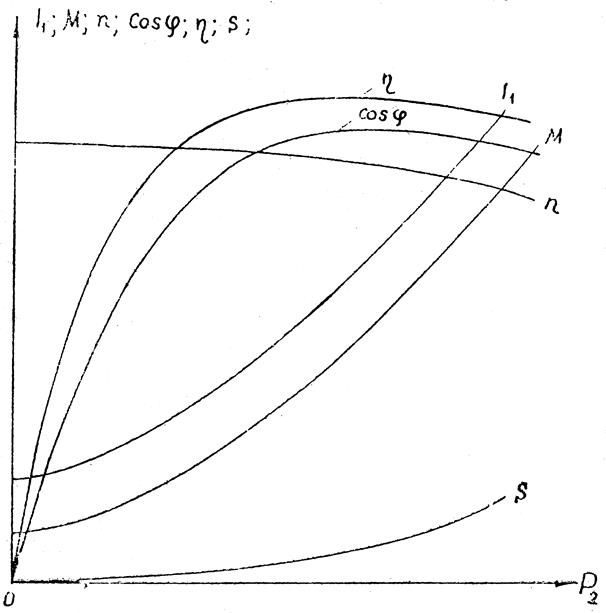
टर्मिनलों का उपयोग तीन चरण के प्रारंभ-नियंत्रण प्रतिरोधकों (छवि 4) के रोटर घुमाव से जोड़ने के लिए किया जाता है, जिसमें तीन होते हैं, खंडों में विभाजित होते हैं, वही सक्रिय प्रतिरोध, "स्टार" योजना के अनुसार जुड़े होते हैं। मान को चरण, (,,, 0) से कम किया जा सकता है, संपर्कों को बंद कर सकते हैं, क्रमशः स्थिति से स्थिति, 3, 2, 1, = 0 तक रियोस्टैट के हैंडल (हैंडव्हील) को स्थानांतरित कर सकते हैं।
एक चरण रोटर के साथ एक एसिंक्रोनस मोटर के संचालन का सिद्धांत
टर्मिनल पर लागू तीन चरण वोल्टेज की क्रिया के तहत स्टेटर विंडिंग्स के माध्यम से बहने वाला प्रवाह स्टेटर के अंदर एक घुमावदार चुंबकीय प्रवाह बनाता है। स्टेटर से संबंधित इस धारा के घूर्णन की आवृत्ति सूत्र द्वारा निर्धारित की जाती है:
जहां - तीन चरण आपूर्ति नेटवर्क की आवृत्ति, एचजे,
पी स्टेटर घुमावदार ध्रुवों के जोड़े की संख्या है,
- चुंबकीय प्रवाह, आरपीएम के घूर्णन की आवृत्ति।
प्रवाह के घूर्णन की दिशा स्टेटर चरणों के घूर्णन के क्रम द्वारा निर्धारित की जाती है। चरण अनुक्रम बदलना चुंबकीय प्रवाह को उलट देता है। चरण अनुक्रम को बदलने के लिए, नेटवर्क पर स्टेटर को जोड़ने वाले तीनों तारों में से किसी एक को स्वैप करना पर्याप्त है। घुमावदार चुंबकीय प्रवाह की परिमाण, जो स्टेटर चरण विंडिंग्स के तीन साइनसॉइडल चुंबकीय प्रवाहों का योग है, समय के साथ बदलती नहीं है और सूत्र द्वारा निर्धारित की जाती है:
जहां ─ स्टेटर चरण घुमाने के sinusoidal अलग चुंबकीय प्रवाह का आयाम है।
मान यू = पर स्टेटर टर्मिनल पर लागू वोल्टेज के लिए सीधे आनुपातिक है स्थिरांक स्थिर भी रोटेशन के दौरान, इसकी पावर लाइनों के साथ चुंबकीय प्रवाह रोटर घुमाव के कंडक्टर को पार करता है और उनमें तीन चरण ईएमएफ लगाता है। चूंकि रोटर घुमाव बंद है (एक तरफ r एक स्टार से जुड़े रोटर चरण विंडिंग्स का सामान्य बिंदु, दूसरे पर a एक स्टार में जुड़े रियोस्टैट के प्रतिरोध का सामान्य बिंदु), तीन चरण रोटर वर्तमान इसके माध्यम से बह जाएगा, जो एक घूर्णन रोटर प्रवाह बनाता है।
प्रवाह और घुमाएं और इंजन के कुल घूर्णन प्रवाह को बनाते हैं। कुल चुंबकीय प्रवाह, स्टेटर घुमावदार और रोटर घुमाव के साथ मिलकर, उनमें इलेक्ट्रोमोटिव बलों को प्रेरित करता है। यह एक ट्रांसफॉर्मर के साथ एक एसिंक्रोनस मोटर का समानता है।
फ्लक्स एफ के साथ रोटर धाराओं की बातचीत के परिणामस्वरूप, रोटर घुमावदार कंडक्टर पर काम कर रहे यांत्रिक बल एक घूर्णन विद्युत चुम्बकीय पल एम बनाते हैं। यदि टोक़ एम शाफ्ट पर स्थिर ब्रेकिंग पल से अधिक है, तो मोटर रोटर घूर्णन आवृत्ति के साथ क्षेत्र के घूर्णन की दिशा में घुमाएगा< . Относительную разность частот вращения поля и ротора называют скольжением.
पर्ची की गति, पर्ची के माध्यम से व्यक्त किया जाएगा
![]() .
.
इंजन = 0, और एस = 1 शुरू करते समय। यदि रोटर स्टेटर फ़ील्ड (=) के साथ सिंक्रनाइज़ घुमाता है, तो पर्ची शून्य (एस = 0) होगी। जब स्टेटर का चुंबकीय क्षेत्र रोटर के सापेक्ष स्थिर होता है और रोटर में धाराओं को प्रेरित नहीं किया जाएगा, इसलिए एम = 0. इसलिए, मोटर इस गति तक नहीं पहुंच सकती है, इसलिए नाम ─ एसिंक्रोनस (गैर-एक साथ)।
ऊर्जा चार्ट
एक असीमित मोटर, साथ ही साथ अन्य इलेक्ट्रिक मशीनों में ऊर्जा रूपांतरण, इसके नुकसान के साथ है। इन हानियों, जिन्हें तीन प्रकारों में विभाजित किया जा सकता है: विद्युत, चुंबकीय और यांत्रिक, और बिजली रूपांतरण की पूरी प्रक्रिया स्पष्ट रूप से ऊर्जा आरेख (चित्र 5) में दर्शायी जाती है।
नेटवर्क से इंजन को आपूर्ति की गई शक्ति:
⋅ ⋅ कॉस, डब्ल्यू,
स्टेटर घुमावदार चरण, वी पर लागू वोल्टेज कहाँ है;
- स्टेटर घुमाव के चरण में वर्तमान, ए;
कॉस मोटर पावर फैक्टर है।

स्टेटर को आपूर्ति की गई विद्युत ऊर्जा आंशिक रूप से स्टील में (और) में भारी नुकसान और हिस्टैरेसीस के कारण स्टेटर में खो जाती है और घुमावदार कंडक्टर में नुकसान ()
स्टेटर घुमावदार चरण का सक्रिय प्रतिरोध कहां है;
- स्टेटर घुमाने के चरणों की संख्या (तीन चरण मोटर = 3 के लिए)।
चुंबकीय प्रवाह के माध्यम से शेष शक्ति रोटर को प्रेषित की जाती है और इसलिए विद्युत चुम्बकीय शक्ति कहा जाता है ()
- (+) डब्ल्यू
रोटर घुमाव में विद्युत नुकसान को कवर करने के लिए विद्युत चुम्बकीय शक्ति का हिस्सा खर्च किया जाता है, यह पर्ची के समान होता है
शेष विद्युत चुम्बकीय शक्ति को यांत्रिक इंजन शक्ति में परिवर्तित किया जाता है, जिसे कुल यांत्रिक शक्ति कहा जाता है।
मोटर शाफ्ट, डब्ल्यू में यांत्रिक शक्ति यांत्रिक और अतिरिक्त हानियों की मात्रा से कुल यांत्रिक शक्ति से कम है।
इंजन दक्षता
इंजन प्रदर्शन
किसी अन्य इलेक्ट्रिक मोटर की तरह, एक चरण-घाव रोटर के साथ एक एसिंक्रोनस मोटर का मूल्यांकन शुरू करने, संचालन और समायोजन विशेषताओं के सेट के आधार पर किया जाता है। इंजन की शुरुआत और न्यूनतम घूर्णन गति के त्वरण को रोटर सर्किट में जोड़े गए सक्रिय सक्रिय प्रतिरोध के मूल्य के आधार पर यांत्रिक विशेषताओं और घुमावदार धाराओं को बदलकर पता लगाया जा सकता है।
यांत्रिक विशेषता रोटर सर्किट में लगातार सक्रिय प्रतिरोध के साथ शाफ्ट पर टोक़ पर घूर्णन गति की निर्भरता है, यानी।
= च (एम) = कॉन्स पर।
एक चरण-रोटर के साथ एक एसिंक्रोनस मोटर की यांत्रिक विशेषताओं का परिवार चित्र में दिखाया गया है। 6।
| |
| |
| |
यांत्रिक विशेषता का प्रकार ड्राइव के व्यवहार को निर्धारित करता है।
स्टार्ट-अप के क्षणिक मोड में, ब्रेक लगाना, घूर्णन गति में परिवर्तन, जो तंत्र के प्रदर्शन को प्रभावित करता है, साथ ही परिचालन स्थितियों के तहत इसकी विश्वसनीयता को भी प्रभावित करता है। रोटर सर्किट में सक्रिय प्रतिरोध के साथ इंजन की यांत्रिक विशेषताओं को कृत्रिम कहा जाता है; प्रत्येक मूल्य अपनी कृत्रिम यांत्रिक विशेषता से मेल खाता है। रोटर सर्किट (= 0) में अतिरिक्त प्रतिरोध की अनुपस्थिति में यांत्रिक विशेषता को प्राकृतिक कहा जाता है। प्राकृतिक और कृत्रिम यांत्रिक विशेषताओं ordinates की धुरी पर एक आम बिंदु पर अंतरण - स्टेटर के घूर्णन चुंबकीय क्षेत्र की घूर्णन गति। सबसे किफायती की प्राकृतिक यांत्रिक विशेषताओं पर इंजन ऑपरेशन। प्राकृतिक यांत्रिक विशेषता सबसे कठोर है, यानी। जब भार बदलता है इंजन की गति थोड़ा बदल जाती है। लेकिन जब एक प्राकृतिक यांत्रिक विशेषता पर काम करते हैं, तो मोटर का एक छोटा प्रारंभिक टोक़ = (0.7 ÷ 1.8) होता है और एक बड़ा प्रारंभिक प्रवाह
= (5.5 ÷ 7.0)
रोटर सर्किट में पेश प्रतिरोध प्रतिरोध शुरू करने के पल में वर्तमान को कम कर देता है और साथ ही साथ प्रारंभिक टोक़ भी बढ़ता है, यानी। इंजन शुरू करने की विशेषताओं में सुधार करता है। इसलिए, एक चरण रोटर के साथ एक प्रेरण मोटर की शुरुआत कृत्रिम यांत्रिक विशेषताओं (खंड एबी, सीडी, ef, प्रारंभिक आरेख के gh) पर किया जाता है।
प्रतिरोध के अगले खंड को हटाने के बाद एक कृत्रिम विशेषता से दूसरे में संक्रमण होता है।
आरेख का बिंदु "के" प्राकृतिक यांत्रिक विशेषता पर इंजन शुरू होता है।
शुरू करने से पहले रोटर घुमाव के प्रत्येक चरण में शुरू किया गया प्रतिरोध चुना जाता है ताकि शुरुआती पल महत्वपूर्ण पल के बराबर हो, यानी। =।
जैसा कि यह ज्ञात है, अधिकतम पल महत्वपूर्ण पर्ची पर होता है, जो सूत्र द्वारा निर्धारित किया जाता है:
रोटर घुमाव के चरण के सक्रिय प्रतिरोध कहां है, ओहम;
- स्थिर रोटर, ओहम की घुमाव के चरण के अपरिवर्तनीय प्रतिरोध।
अधिकतम प्रारंभिक टोक़ प्राप्त करने के लिए, स्थिति को पूरा किया जाना चाहिए
![]() = 1
= 1
चिकनी शुरुआत की आवश्यकताओं के अनुसार प्रतिरोध के चरणों की संख्या चुना जाता है।
एक चरण-रोटर के साथ एक एसिंक्रोनस मोटर का प्रदर्शन घूर्णन गति एन, टोक़ एम की निर्भरता है, वर्तमान, पावर फैक्टर एसओएस, दक्षता η = शाफ्ट पर शाफ्ट पावर पर निर्भर करता है और एफ 1 = कॉन्स, यानी
एम, एसओएस, η = च (
प्रदर्शन इंजन के मूल गुणों पर तय किया जाता है। विशेष रूप से, वे यांत्रिक विशेषता बनाया जा सकता है
एन = एफ (एम)। एक विद्युत चुम्बकीय ब्रेक का उपयोग कर सीधे लोडिंग द्वारा कम पावर इंजनों का प्रदर्शन हटाया जा सकता है। मध्यम और उच्च शक्ति इंजन के लिए, प्रदर्शन एक पाई चार्ट द्वारा निर्धारित किया जाता है। एक एसिंक्रोनस मोटर की प्रदर्शन विशेषताओं का एक उदाहरण चित्र में दिखाया गया है। 7।
एक चरण रोटर = एफ () के साथ एक एसिंक्रोनस मोटर की विनियमन विशेषता सक्रिय प्रतिरोध की परिमाण पर शाफ्ट पर निरंतर टोक़ पर इंजन की गति की निर्भरता का प्रतिनिधित्व करती है। मोटर रोटर सर्किट में प्रतिरोध शुरू करके, घूर्णन गति को नाममात्र से नीचे समायोजित किया जा सकता है। विनियमन की सीमा व्यापक होगी, इंजन को अधिक भारी लोड किया जाएगा। इंजन को प्राकृतिक विशेषताओं से नरम कृत्रिम विशेषताओं तक काम करने के लिए स्विच करके स्पीड विनियमन किया जाता है। गति नियंत्रण की यह विधि आर्थिक नहीं है, क्योंकि प्रतिरोध में उच्च ऊर्जा नुकसान। अंजीर में 6 रेटेड लोड पर संभावित गति नियंत्रण की सीमा दिखाता है।
विद्युत चुम्बकीय ब्रेक
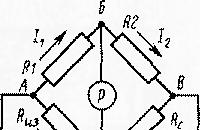
अध्ययन के तहत एसिंक्रोनस मोटर का भार विद्युत चुम्बकीय ब्रेक (चित्र 8) के माध्यम से किया जाता है, जिसमें चुंबकीय प्रणाली और स्टील डिस्क होती है। चुंबकीय प्रणाली में चुंबकीय कोर और ओबीटी (ब्रेक उत्तेजना घुमाव) की घुमाव शामिल है। डिस्क इलेक्ट्रिक मोटर के साथ एक ही शाफ्ट पर है और घूर्णन में आखिरी बार संचालित होती है।
ब्रेक का सिद्धांत स्टील डिस्क के भंवर धाराओं की बातचीत से ब्रेकिंग पल के निर्माण पर आधारित होता है जो घुमावदार ओवीटी के चुंबकीय प्रवाह के साथ होता है, जो प्रत्यक्ष प्रवाह से उत्साहित होता है।
चुंबकीय प्रणाली डिस्क शाफ्ट के सापेक्ष घुमा सकती है, और घूर्णन का कोण इंजन पर लोड के क्षण पर निर्भर करता है। ब्रेक स्केल, टोक़ की इकाइयों में कैलिब्रेटेड, मोटर को एनएम में लोड पढ़ने की अनुमति देता है।
काम का आदेश
चेतावनी!
काम करते समय, कार्यस्थल पर निर्देशों में निर्धारित सुरक्षा निर्देशों का पालन करें!
कक्षाओं के नेता द्वारा प्रदान की जाने वाली योजना पर न आएं !!!
1. इंजन के अध्ययन के लिए स्थापना के उपकरण और उपकरणों से परिचित होने के लिए।
ए) एमकेए -13 के चरण चरण रोटर के साथ एक प्रेरण मोटर की टर्मिनल ढाल, स्टेटर घुमावदार क्लैंप के स्थान से खुद को परिचित करें: ![]() और रोटर घुमावदार clamps,।
और रोटर घुमावदार clamps,।
बी) इंजन के साथ एक ही शाफ्ट पर स्थित विद्युत चुम्बकीय ब्रेक "ईटी", और ब्रेक प्रतिरोधी।
सी) तीन चरण गिट्टी;
जी) मापने के यंत्र: एमिटर, वोल्टमीटर, वाटमीटर;
ई) इलेक्ट्रिक टैकोमीटर का सेंसर और सूचक;
ई) टर्मिनलों ए, बी, सी प्रयोगशाला पैनल और ए 4 मशीन पर;
जी) टर्मिनलों (+), (-) प्रयोगशाला पैनल पर 110 वी और स्वचालित मशीन ए 2।
2. पासपोर्ट पर इंजन की तकनीकी विशेषताओं से परिचित होने के लिए।
रिपोर्ट में मूल डेटा (प्रकार, शक्ति, वोल्टेज, वर्तमान, आवृत्ति, रोटर गति, दक्षता, शक्ति कारक, ईडीएस और रोटर वर्तमान) इंगित करता है।
3. इलेक्ट्रिक टैकोमीटर को जानें।
इलेक्ट्रिक टैकोमीटर के संकेतक के दो तीर होते हैं: छोटा हाथ हजारों क्रांति प्रति मिनट दिखाता है, बड़ा हाथ सैकड़ों मोड़ दिखाता है।
4. इंजन के अध्ययन के लिए योजना इकट्ठा करें (चित्र 8)।
5. तालिका 1 में उपकरणों को मापने के मुख्य तकनीकी डेटा रिकॉर्ड करें।
तालिका 1
6. शुरू करने के लिए इंजन तैयार करें:
6.1। प्रतिरोधी ब्रेक के हैंडल "ऑफ" स्थिति में डाल दिया।
6.2। इंजन rheostat स्थिति में डाल दिया।
7. वर्ग नेता की जांच करने के लिए योजना दें।
8. पर्यवेक्षक द्वारा सर्किट की जांच करने और सक्षम करने के लिए अनुमति प्राप्त करने के बाद, automaton A2 चालू करें और वर्तमान को rheostat = 0.7 ए पर सेट करें।
9. स्टार्ट-अप चार्ट बनाने के लिए डेटा निकालें।
9.1। मशीन ए 4 चालू करें।
9.2। जब हैंडल को "ऑफ" स्थिति से स्थिति में ले जाया जाता है, तो रैखिक प्रवाह की घुसपैठ को मापें, यानी। = 0 पर
9.3। इस चरण में इंजन के स्थिर-राज्य संचालन की प्रतीक्षा करने के बाद (टैकोमीटर सुई चलती रहती है), घूर्णन गति के अधिकतम मूल्य और रैखिक प्रवाह के इसी न्यूनतम मूल्य को मापें। परिणाम तालिका 2 (प्रथम चरण) की पहली पंक्ति में दर्ज किया गया है।
9.4। शेष शुरुआती चरणों के लिए समान माप करें (जब रियोस्टैट का संचालन स्थिति से स्थिति 3 में स्थानांतरित हो जाता है, 3 से स्थिति 2 तक)। तालिका 2 में दर्ज मापन डेटा।
इस चरण के घूर्णन की आवृत्ति का न्यूनतम मूल्य पिछले चरण में अपने अधिकतम मूल्य के बराबर है, यानी। एक विशेषता से दूसरे में इंजन का संक्रमण तब होता है जब n = कॉन्स
10. अनुक्रम में इंजन बंद करें।
जैसा कि आप जानते हैं, विद्युत वोल्टेज का अपना उपाय होना चाहिए, जो प्रारंभ में उस मूल्य से मेल खाता है जो ...

कोयला पहला जीवाश्म ईंधन है जिसे मनुष्य ने उपयोग करना शुरू किया। वर्तमान में एक ऊर्जा वाहक के रूप में ...

थर्मल रिले विद्युत उपकरण हैं जिनके मुख्य उद्देश्य इंजन के खिलाफ अत्यधिक सुरक्षा के लिए है ...

कार्य योजना: कार्बन परमाणु का परिचय संरचना। प्रकृति में प्रसार। कार्बन उत्पादन। शारीरिक और रासायनिक ...
विद्युत मात्रा, जो विद्युत प्रवाह के प्रवाह को रोकने के लिए सामग्री की संपत्ति को दर्शाती है। में ...
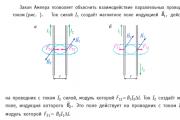
एम्पेरे का कानून इलेक्ट्रिकल इंजीनियरिंग में सबसे महत्वपूर्ण और सबसे उपयोगी कानूनों में से एक है, जिसके बिना वैज्ञानिक और तकनीकी ...
परमाणु ऊर्जा संयंत्र की तकनीकी योजना रिएक्टर के प्रकार, शीतलक और मॉडरेटर के प्रकार, साथ ही कई अन्य पर निर्भर करती है ...

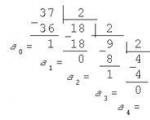
आमतौर पर, ऋणात्मक दशमलव संख्या स्वचालित रूप से विपरीत या परिवर्तित हो जाती है ...
सूचना विज्ञान और आईसीटी ग्रेड 8 कार्यपुस्तिका Bosova एलएल 2012 उत्तर, सूचना विज्ञान और आईसीटी ग्रेड 8 कार्यपुस्तिका ...

लाइट / बिजली मीटर और मीटरींग सितम्बर 1 Mosenergosbyt हर महीने डेटा हस्तांतरण की आवश्यकता है ...
जानकारी संग्रहीत करने और संचारित करने के तकनीकी साधनों के आगमन के साथ, नए विचार और कोडिंग तकनीक उभरी ....
सी (कार्बोनेम), आवधिक प्रणाली के समूह आईवीए (सी, सी, जीई, एसएन, पीबी) के गैर धातु रासायनिक तत्व ...

हाइड्रोकार्बन ईंधन, पर्यावरणीय गिरावट और कई अन्य कारणों का थकावट जल्द या बाद में ...
सबसे पहले, आइए विचाराधीन समस्याओं के लिए बुनियादी और सामान्य प्रश्न पर ध्यान दें: पता लगाएं कि क्या निर्भर करता है ...

एंथ्रासाइट (ग्रीक। Ανθραξ - कोयले), ठोस, उच्च घनत्व, चमकीले कोयला 90% से अधिक कार्बन युक्त ...
विद्युत उपकरण नियमित रूप से उन परीक्षणों के अधीन होते हैं जो अनुपालन की जांच के उद्देश्यों को आगे बढ़ाते हैं ...