वर्तमान और वोल्टेज के लिए बिजली की गणना
जैसा कि आप जानते हैं, विद्युत वोल्टेज का अपना उपाय होना चाहिए, जो प्रारंभ में उस मूल्य से मेल खाता है जो ...
सबसे पहले, हम जिन समस्याओं पर विचार कर रहे हैं, उनके लिए हम बुनियादी और सामान्य मुद्दों पर ध्यान देंगे: हम यह पता लगाएंगे कि विद्युत शक्ति प्रणाली में आवृत्तियों और वोल्टेज का उपयोग किस प्रकार किया जाता है।
विद्युत नेटवर्क से जुड़े प्रत्येक ऊर्जा रिसीवर सक्रिय और प्रतिक्रियाशील शक्ति का उपभोग करते हैं, जिनके परिमाण पहले उल्लेख किए गए हैं, उनके टर्मिनल और आवृत्ति पर वोल्टेज द्वारा निर्धारित किए जाते हैं। ऊर्जा लोड रिसीवर को शक्ति देने और नेटवर्क में घाटे को कवर करने के लिए आपूर्ति की गई शक्ति इस लोड मोड में सिस्टम के एक निश्चित नोड को जोड़ने के लिए केवल इस नोड पर आवृत्ति और वोल्टेज मान पर निर्भर करती है।
नतीजतन, उस बिंदु पर आवृत्ति और वोल्टेज द्वारा निर्धारित किसी भी नोडल बिंदु का भार विशिष्ट रूप से आवृत्ति और वोल्टेज के सामान्य मूल्यों के क्षेत्र में होता है। एक निश्चित नोडल बिंदु पर भार की स्थिर विशेषताओं को ज्ञात आवृत्ति पर वोल्टेज पर इस लोड की सक्रिय और प्रतिक्रियाशील शक्तियों की निर्भरता के रूप में जाना जाता है। विभिन्न आवृत्तियों के लिए, समान विशेषताओं का एक परिवार बनाया जा सकता है (चित्र 2)।
अंजीर। 2. वोल्टेज पर सक्रिय और प्रतिक्रियाशील शक्ति की निर्भरता
किसी दिए गए नोडल बिंदु पर, सिस्टम से इसे सक्रिय और प्रतिक्रियाशील शक्तियों के कुछ निश्चित मूल्यों से प्रेषित करके केवल कुछ आवृत्ति और वोल्टेज सेटपॉइंट प्रदान करना संभव है। दिए गए आवृत्ति और वोल्टेज पर ये मान लोड की इसी स्थिर विशेषताओं से निर्धारित किए जा सकते हैं। यदि बाहरी नेटवर्क से कुछ कारणों से अपर्याप्त सक्रिय या प्रतिक्रियाशील शक्ति नोडल बिंदु पर बहती है, तो आवृत्ति और वोल्टेज के निर्दिष्ट मान इस नोडल बिंदु पर स्थापित नहीं किए जा सकते हैं: वास्तविक मोड के पैरामीटर अलग होंगे। आइए इस प्रश्न को अधिक विस्तार से देखें।
स्थिर विशेषताओं के दिए गए परिवारों को निम्नलिखित निर्भरताओं से स्पष्ट रूप से व्यक्त किया जाना चाहिए:
प्रणाली के दिए गए नोडल बिंदु पर बहने वाली सक्रिय और प्रतिक्रियाशील शक्ति की परिमाण की परिमाण पर निर्भर करती है यू और इस नोडल बिंदु पर वोल्टेज चरण, साथ ही आसन्न नोडल बिंदुओं और नेटवर्क अनुभागों को जोड़ने वाले प्रतिरोधों पर वोल्टेज के परिमाण और चरणों से भी।
सबसे पहले, सादगी के लिए, हम मानते हैं कि निकटतम नोड बिंदुओं पर वोल्टेज परिमाण और चरण में स्थिर होते हैं और समान आवृत्ति होती है। च. फिर इस नोडल बिंदु पर एक पूरी तरह से परिभाषित वोल्टेज स्थापित किया जाएगा, जिसमें परिमाण और चरण सक्रिय और प्रतिक्रियाशील शक्तियों के संतुलन की स्थिति से निर्धारित होते हैं: कुल सक्रिय और प्रतिक्रियाशील शक्ति इस नोडल बिंदु पर बहती है ( पी जी और क्यू डी) इस नोडल बिंदु पर लोड की सक्रिय और प्रतिक्रियाशील शक्तियों के क्रमशः, बराबर होना चाहिए ( पी एन और क्यू एन)। एक आवृत्ति पर, उत्तरार्द्ध केवल वोल्टेज कार्यों होगा। तो
![]()
![]()
दो अज्ञातों के साथ ये दो समीकरण हमें निर्धारित करने की अनुमति देते हैं यू और ।
आइए दिखाएं कि यह समस्या ग्राफिकल हल कैसे हुई है। चलो एक आरेख (अंजीर 3) विशेषता पर गठबंधन करते हैं पी एच = एफ 1 ( यू), निर्दिष्ट मूल्य के अनुरूप है च, और विशेषताओं के परिवार पी जी = 1 ( यू, ) एक ही मूल्य के अनुरूप च, लेकिन values के विभिन्न मूल्यों के साथ। तो के रूप में पी जी = पी एच, फिर निर्भरता по = Φ ( यू), नोडल बिंदु पर सक्रिय शक्तियों के संतुलन के अनुरूप। इसके अलावा, इसी तरह, हम विशेषता क्यू एच = Φ 2 ( यू) और विशेषताओं के परिवार क्यू डी = 2 ( यू, ) विभिन्न (अंजीर 4) और दिए गए के लिए च। निर्भरता की मदद से = एफ ( यू) प्रत्येक विशेषताओं पर क्यू डी = 2 ( यू, ) विशेषता पर स्थित बिंदु प्राप्त करें क्यू डी = (यू)। इन बिंदुओं को जोड़कर, हम सभी विशेषताओं को प्राप्त करते हैं क्यू डी = (यू), सक्रिय शक्ति के संतुलन के अनुरूप। फिर विशेषताओं के चौराहे का बिंदु क्यू एच = Ф ( यू) और क्यू डी = (यू) वास्तविक वोल्टेज निर्धारित करता है यू एच (चित्र 4)।
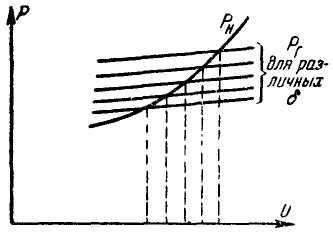
अंजीर। 3. वोल्टेज की परिमाण पर कतरनी कोण (चरण) की निर्भरता का निर्धारण
सिस्टम में आसन्न नोडल बिंदुओं और आवृत्तियों पर वोल्टेज के आयाम और चरण में अपरिवर्तनीयता के मामले से संबंधित हमारे पिछले विचार। हकीकत में, ऐसी कोई अपरिवर्तनीयता नहीं है, और सभी नोडल बिंदुओं पर वोल्टेज परिमाण और चरण में भिन्न हो सकते हैं; सिस्टम की आवृत्ति भी भिन्न हो सकती है।

अंजीर। 4. निर्भरता विशेषताओं का निर्माण क्यू से यू
हालांकि, सिस्टम में आप ऐसे नोडल पॉइंट्स पा सकते हैं जिनमें निरंतरता और चरण निरंतर बनाए रखा जाता है या केवल वोल्टेज द्वारा परिमाण में या जिसमें से एक निश्चित सक्रिय शक्ति नेटवर्क पर प्रेषित होती है।
ऊर्जा वाहक के एक निश्चित इनलेट और मोड पैरामीटर के सामान्य मानों पर, मुख्य प्रेमी केवल नेटवर्क आवृत्ति के आधार पर शक्ति विकसित करता है, और इसलिए, इन शर्तों के तहत विद्युत चुम्बकीय जनरेटर शक्ति केवल आवृत्ति पर निर्भर करती है:
पी जी = एफ ( यू).
जब जनरेटर का उत्तेजना प्रवाह निरंतर होता है, तो emf मान अपरिवर्तित होता है। जनक ए घ , और उत्तेजना नियामकों की उपस्थिति में, इसके टर्मिनल पर वोल्टेज की परिमाण अपरिवर्तित या लगभग अपरिवर्तित होगी।
सिस्टम में सक्रिय और प्रतिक्रियाशील शक्तियों का संतुलन होना चाहिए: सभी जेनरेटर की सक्रिय और प्रतिक्रियाशील शक्तियों का योग सभी नोडल बिंदुओं पर लोड की सक्रिय और प्रतिक्रियाशील शक्तियों के योग और नेटवर्क के सभी तत्वों में सक्रिय और प्रतिक्रियाशील शक्तियों के नुकसान के बराबर होना चाहिए। नतीजतन, पूरे तंत्र में आवृत्ति, साथ ही प्रत्येक नोडल बिंदुओं में वोल्टेज की परिमाण और चरण, बिजली संतुलन की स्थिति के अनुसार ही स्थापित की जाएगी।
सिस्टम को कुछ मोड स्थापित करने दें। आइए जनरेटरों में से किसी एक के प्राथमिक इंजन में ऊर्जा इनलेट को बदल दें। इस जनरेटर का रोटर शिफ्ट कोण भी बदल जाएगा। पूरी प्रणाली में, आवृत्ति में एक परिवर्तन होगा, साथ ही साथ सभी नोडल बिंदुओं पर वोल्टेज के परिमाण और चरणों में परिवर्तन होगा। ये परिवर्तन समय के साथ घटित होंगे जब तक कि सिस्टम में एक नया पावर बैलेंस मोड स्थापित नहीं होता है। यह प्रक्रिया उतनी आसान है जितनी आप उम्मीद करेंगे। वास्तव में, उदाहरण के लिए, ऊर्जा इनलेट में कमी से इस जनरेटर के रोटर कतरनी कोण में दूसरों के सापेक्ष कमी आएगी; अन्य जेनरेटर के सक्रिय भार में वृद्धि होगी। इन जनरेटर में से प्रत्येक के शाफ्ट पर असंतुलन दिखाई देगा, और वे धीमा होने लगेंगे। इस संबंध में, जनरेटर, जिसका प्राथमिक इंजन कम ऊर्जा इनलेट होता है, को भी ब्रेक करना शुरू कर देना चाहिए, क्योंकि जब शेष जेनरेटर के रोटर कोण कम हो जाते हैं, तो उसे अतिरिक्त भार लेना चाहिए। सभी जेनरेटर के मंदी से सिस्टम में कुल आवृत्ति में कमी आएगी। जैसे ही यह घटता है, नोड लोड की सक्रिय क्षमता उनकी आवृत्ति स्थिर विशेषताओं के अनुसार घट जाएगी और अन्य सभी जनरेटर की क्षमताओं प्राथमिक इंजनों के गति नियंत्रकों की स्थिर विशेषताओं के अनुसार बढ़ेगी .
इन दोनों कारकों से इस तथ्य का कारण बन जाएगा कि आवृत्ति में पर्याप्त रूप से बड़ी कमी के साथ, शेष राशि जेनरेटर के शाफ्ट में फिर से आ जाएगी; प्राथमिक इंजन द्वारा विकसित शक्तियों को भार शक्तियों के साथ संतुलित किया जाएगा
जनरेटर। आवृत्ति में और कमी बंद हो जाएगी। यह ध्यान दिया जाना चाहिए कि आवृत्ति में कमी ई.एस.एस. में बदलाव का कारण बनती है। सभी जेनरेटर, सिस्टम की सभी शाखाओं की प्रतिक्रिया, और इसके परिणामस्वरूप, नेटवर्क में सभी वोल्टेज, जो बदले में वोल्टेज और आवृत्ति की अपनी स्थिर विशेषताओं के अनुसार सभी नोडल बिंदुओं के सक्रिय और प्रतिक्रियाशील भार में परिवर्तन का कारण बनेंगे। इस प्रकार, प्रक्रिया काफी जटिल है।
एक और मामले पर विचार करें। बड़े सिस्टम जेनरेटर में से एक पर उत्तेजना नियंत्रक सेटिंग कम हो जाने दें। फिर इस जनरेटर से प्रतिक्रियाशील शक्ति की रिहाई कम हो जाएगी, जिससे कम से कम विद्युत नेटवर्क के पास के क्षेत्र में वोल्टेज में कमी आएगी। वोल्टेज को कम करने से वोल्टेज की स्थिर स्थिरताओं के अनुसार सभी नोडल बिंदुओं के सक्रिय और प्रतिक्रियाशील भार कम हो जाएंगे। प्रत्येक जनरेटर के शाफ्ट पर असंतुलन दिखाई देगा; उनके रोटर्स के कतरनी कोण, और इसके परिणामस्वरूप, उनकी घूर्णन गति में वृद्धि होगी। इससे आवृत्ति में वृद्धि होगी, क्योंकि जनरेटर, विशेष रूप से आस-पास के लोगों को उतार दिया जाएगा। प्रणाली के सक्रिय भार में वृद्धि के कारण नई शेष राशि आने तक सिस्टम में आवृत्ति बढ़ेगी। बदले में आवृत्ति में वृद्धि वोल्टेज में वृद्धि को प्रभावित करेगा।
इस तरह प्रणाली में आवृत्ति, वोल्टेज, और सक्रिय और प्रतिक्रियाशील शक्तियों में परिवर्तन का जटिल अंतःक्रिया है। हालांकि, व्यावहारिक समस्याओं को हल करने के लिए कोई व्यक्ति कुछ आदर्शीकरण द्वारा कार्य को सरल बना सकता है।
तो, वोल्टेज और प्रतिक्रियाशील शक्तियों में परिवर्तनों से विचलित होने पर, हम मान सकते हैं कि सिस्टम में सक्रिय शक्तियों के संतुलन में एक निश्चित तरीके से परिवर्तन केवल आवृत्ति में परिवर्तन को प्रभावित करता है।
दरअसल, उपभोक्ताओं के सक्रिय भार में वृद्धि या जनरेटर की सक्रिय शक्ति में कमी पहली जगह में इस प्रणाली के लिए निर्धारित प्रणाली में आवृत्ति में कमी का कारण बनती है। व्यावहारिक रूप से यह सबसे महत्वपूर्ण है। यह कम महत्वपूर्ण है कि यह आवृत्ति परिवर्तन जंक्शन बिंदु के आधार पर कुछ अलग होगा, जिस पर सक्रिय भार बढ़ता है या किस विशेष जनरेटर पर सक्रिय शक्ति कम हो जाती है। यह अंतर अन्य कारकों (वोल्टेज, प्रतिक्रियाशील शक्तियों) के प्रभाव के कारण है और यह इतना अच्छा नहीं है। एक सक्रिय बिजली घाटे की घटना के कारण आवृत्ति में कमी से संतुलन की बहाली होनी चाहिए, क्योंकि इस मामले में, आवृत्ति और वोल्टेज में कमी के कारण, सक्रिय भार कम हो जाता है। साथ ही, प्राइम मूवर्स और फ्रीक्वेंसी के स्पीड कंट्रोलर ऊर्जा वाहक के इनलेट को बढ़ाते हैं, और जेनरेटर की सक्रिय शक्ति बढ़ जाती है।
अनुपात, यानी सक्रिय शक्ति के सापेक्ष असंतुलन पर सापेक्ष आवृत्ति परिवर्तन की निर्भरता स्थिर नहीं है और, प्रणाली के संचालन के तरीके के आधार पर, काफी व्यापक सीमाओं के भीतर भिन्न हो सकती है।
बिजली के लिए, गुणवत्ता के मुख्य संकेतक: वोल्टेज और आवृत्ति, थर्मल ऊर्जा के लिए: दबाव, भाप का तापमान और गर्म पानी। आवृत्ति सक्रिय शक्ति (पी), और प्रतिक्रियाशील शक्ति (क्यू) के साथ वोल्टेज से जुड़ा हुआ है।
सभी घूर्णन मशीनों और इकाइयों को इस तरह से डिजाइन किया गया है कि आर्थिक दक्षता प्रति मिनट क्रांति की मामूली संख्या में प्राप्त की जाती है: एन = 60 एफ / पी,
जहां: n प्रति मिनट क्रांति की संख्या है, एफ -, पी ध्रुवों के जोड़े की संख्या है।
एसी आवृत्ति
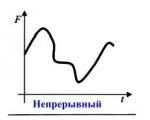
जनरेटर द्वारा उत्पन्न टर्बाइन की गति का एक कार्य है। तंत्र की क्रांति की संख्या आवृत्ति का एक कार्य है।अंजीर में चित्रा 1 आवृत्ति में पावर सिस्टम के लिए सापेक्ष स्थिर लोड विशेषताओं को दिखाता है।
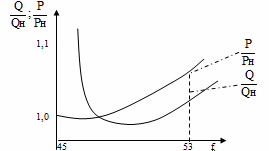
अंजीर। 1।
चित्रा 1 में निर्भरताओं का विश्लेषण दर्शाता है कि आवृत्ति घटाने से इंजन क्रांति की संख्या कम हो जाती है, मशीनों और तंत्र की उत्पादकता कम हो जाती है।
एक उदाहरण
1. कपड़ा कारखाना एक शादी देता है जब आवृत्ति नाममात्र से बदलती है, क्योंकि थ्रेड की गति में परिवर्तन होता है और मशीनें शादी देती हैं।
2. थर्मल पावर प्लांट्स के पंप (पोषक तत्व), वेंटिलेशन (धूम्रपान निकास) क्रांति की संख्या पर निर्भर करते हैं: दबाव "एन 2" के समान होता है, बिजली की खपत "एन 3" होती है, जहां एन प्रति मिनट क्रांति की संख्या होती है;
3. तुल्यकालिक मोटर्स की सक्रिय भार शक्ति आवृत्ति के आनुपातिक है (जब आवृत्ति 1% घट जाती है, सिंक्रोनस मोटर के भार की सक्रिय शक्ति 1% घट जाती है);
4. प्रेरण मोटर्स की सक्रिय भार शक्ति 3% कम हो जाती है जबकि आवृत्ति को 1% कम कर देता है;
5. बिजली प्रणाली के लिए, आवृत्ति को 1% से कम करने से कुल लोड पावर में 1-2% की कमी आती है।

आवृत्ति परिवर्तन बिजली संयंत्रों के संचालन को प्रभावित करता है। प्रत्येक टरबाइन को कुछ निश्चित क्रांति के लिए डिज़ाइन किया गया है, यानी, जब आवृत्ति बूँदें, टरबाइन की टोक़ कम हो जाती है। आवृत्ति ड्रॉप बिजली संयंत्र की अपनी जरूरतों को प्रभावित करता है और नतीजतन, पौधे के योग खराब हो सकते हैं।
सक्रिय शक्ति की कमी के कारण आवृत्ति को कम करते समय, समान स्तर पर आवृत्ति को बनाए रखने के लिए उपभोक्ताओं का भार कम हो जाता है। आवृत्ति प्रति इकाई कहा जाता है जब लोड परिवर्तन की डिग्री आवृत्ति भार का नियामक प्रभाव। आवृत्ति में गिरावट और सक्रिय शक्ति के रिजर्व की अनुपस्थिति में बिजली संयंत्र के स्थिर संचालन में बाधा डालने की प्रक्रिया को आवृत्ति का हिमस्खलन कहा जाता है।
यदि एफ = 50 हर्ट्ज, महत्वपूर्ण आवृत्ति जिस पर बिजली संयंत्रों की अपनी आवश्यकताओं के मुख्य तंत्र का प्रदर्शन शून्य हो जाता है और आवृत्ति का हिमस्खलन होता है - 45 - 46 हर्ट्ज।
जब आवृत्ति गिर जाती है, तो एएमएफ कम हो जाता है। जनरेटर (रोगजनक की गति कम हो जाती है) और घट जाती है।
यह बिजली की गुणवत्ता के पैरामीटर और पावर सिस्टम मोड की मुख्य विशेषता है। मात्रात्मक रूप से, ग्रिड में आवृत्ति प्रति सेकेंड की अवधि के बराबर होती है। नेटवर्क की आवृत्ति में परिवर्तन ऑपरेशन को प्रभावित करते हैं और इसके परिणामस्वरूप, उपभोक्ताओं के प्रदर्शन को प्रभावित करते हैं। इसके अलावा, आवृत्ति विचलन पूरे बिजली प्रणाली के संचालन को प्रभावित करता है।
रेटेड प्रदर्शन आवश्यकताओं
रूसी संघ में, बिजली व्यवस्था की गुणवत्ता के लिए आवश्यकताओं को मानकीकृत किया जाता है। गोस्ट 1310 9-9 7 के अनुसार, बिजली प्रणाली में आवृत्ति को एफ = 50 ± 0.2 हर्ट्ज पर लगातार बनाए रखा जाना चाहिए, जबकि मूल्य shortf = 0.4 हर्ट्ज के लिए एक अल्पकालिक आवृत्ति विचलन की अनुमति है।
आवृत्ति पर वर्तमान की निर्भरता का विश्लेषण करते हुए, हम निष्कर्ष निकाल सकते हैं कि यदि कनेक्टेड लोड पूरी तरह से सक्रिय प्रकृति (उदाहरण के लिए, एक प्रतिरोधी) है, तो एक विस्तृत श्रृंखला में वर्तमान तीव्रता आवृत्ति पर निर्भर नहीं होगी। पर्याप्त उच्च आवृत्तियों के मामले में, जब जुड़े लोड के अधिष्ठापन और क्षमता को सक्रिय एक के बराबर प्रतिरोध से चिह्नित किया जाएगा, तो वर्तमान आवृत्ति पर निश्चित निर्भरता होगी।
दूसरे शब्दों में, वर्तमान की आवृत्ति को बदलकर, कैपेसिटेंस में परिवर्तन होता है, जिसमें एक बदलाव, बदले में, सर्किट के माध्यम से बहने वाले प्रवाह में बदलाव की ओर जाता है। यही है, जैसे आवृत्ति बढ़ती है, क्षमता कम हो जाती है, और सर्किट के माध्यम से प्रवाह बहता है।
निर्भरता की गणितीय अभिव्यक्ति निम्नानुसार होगी:
मैं = यूसीओएस;
सक्रिय प्रतिरोध को ध्यान में रखते समय निर्भरता निम्न अभिव्यक्ति द्वारा निर्धारित की जाएगी:
मैं (ω) = यूसीआईपी √ (आर 2 सी 2। Ω2 + 1)।
विद्युत उपकरणों पर वर्तमान आवृत्ति का प्रभाव
इसके बाद, विद्युत प्रवाह की आवृत्ति के प्रभाव पर विचार करें। अपेक्षाकृत कम मूल्यों (1 - 10 हजार हर्ट्ज) तक आवृत्ति को बढ़ाने से आमतौर पर विद्युत उपकरणों की नाममात्र शक्ति में वृद्धि का परिणाम होता है, क्योंकि इससे गैस अंतराल की चालकता बढ़ जाती है। आवृत्ति मीटर का उपयोग कर सिस्टम में आवृत्ति को मापने के लिए।
भाप टरबाइन को इस तरह से डिजाइन और निर्मित किया जाता है कि शाफ्ट पर अधिकतम आउटपुट पावर रोटेशन (फ्रीक्वेंसी) की मामूली गति पर सुनिश्चित किया जाता है। साथ ही, नाममात्र आवृत्ति में कमी टॉर्क में एक बार की वृद्धि के साथ ब्लेड पर भाप प्रभाव पर होने वाली हानि की घटना का परिणाम है, और आवृत्ति में वृद्धि टोक़ में कमी का कारण बनती है। इस प्रकार, इष्टतम आवृत्ति पर ऑपरेशन का सबसे किफायती तरीका हासिल किया जाता है।
इसके अलावा, कम आवृत्तियों पर काम रोटर ब्लेड और अन्य भागों और तंत्र के त्वरित पहनने की ओर जाता है। आवृत्ति में कमी का स्टेशन की जरूरतों के लिए खर्च पर असर पड़ता है।
जैसा कि आप जानते हैं, विद्युत वोल्टेज का अपना उपाय होना चाहिए, जो प्रारंभ में उस मूल्य से मेल खाता है जो ...

कोयला पहला जीवाश्म ईंधन है जिसे मनुष्य ने उपयोग करना शुरू किया। वर्तमान में एक ऊर्जा वाहक के रूप में ...

थर्मल रिले विद्युत उपकरण हैं जिनके मुख्य उद्देश्य इंजन के खिलाफ अत्यधिक सुरक्षा के लिए है ...

कार्य योजना: कार्बन परमाणु का परिचय संरचना। प्रकृति में प्रसार। कार्बन उत्पादन। शारीरिक और रासायनिक ...
विद्युत मात्रा, जो विद्युत प्रवाह के प्रवाह को रोकने के लिए सामग्री की संपत्ति को दर्शाती है। में ...
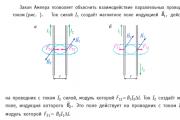
एम्पेरे का कानून इलेक्ट्रिकल इंजीनियरिंग में सबसे महत्वपूर्ण और सबसे उपयोगी कानूनों में से एक है, जिसके बिना वैज्ञानिक और तकनीकी ...
परमाणु ऊर्जा संयंत्र की तकनीकी योजना रिएक्टर के प्रकार, शीतलक और मॉडरेटर के प्रकार, साथ ही कई अन्य पर निर्भर करती है ...

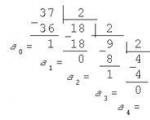
आमतौर पर, ऋणात्मक दशमलव संख्या स्वचालित रूप से विपरीत या परिवर्तित हो जाती है ...
सूचना विज्ञान और आईसीटी ग्रेड 8 कार्यपुस्तिका Bosova एलएल 2012 उत्तर, सूचना विज्ञान और आईसीटी ग्रेड 8 कार्यपुस्तिका ...

लाइट / बिजली मीटर और मीटरींग सितम्बर 1 Mosenergosbyt हर महीने डेटा हस्तांतरण की आवश्यकता है ...
जानकारी संग्रहीत करने और संचारित करने के तकनीकी साधनों के आगमन के साथ, नए विचार और कोडिंग तकनीक उभरी ....
सी (कार्बोनेम), आवधिक प्रणाली के समूह आईवीए (सी, सी, जीई, एसएन, पीबी) के गैर धातु रासायनिक तत्व ...

हाइड्रोकार्बन ईंधन, पर्यावरणीय गिरावट और कई अन्य कारणों का थकावट जल्द या बाद में ...
सबसे पहले, आइए विचाराधीन समस्याओं के लिए बुनियादी और सामान्य प्रश्न पर ध्यान दें: पता लगाएं कि क्या निर्भर करता है ...

एंथ्रासाइट (ग्रीक। Ανθραξ - कोयले), ठोस, उच्च घनत्व, चमकीले कोयला 90% से अधिक कार्बन युक्त ...
विद्युत उपकरण नियमित रूप से उन परीक्षणों के अधीन होते हैं जो अनुपालन की जांच के उद्देश्यों को आगे बढ़ाते हैं ...