Nevysvetliteľné, ale pravdivé: najúžasnejšie javy posledného desaťročia
Mýty starovekého Grécka rozprávajú legendu o žiadostivých lesných nymfách-pokušiteľoch, ktoré lákali cestovateľov do...
FEDERÁLNA VZDELÁVACIA AGENTÚRA
"MATI" - RUSKÝ ŠTÁT
UNIVERZITA TECHNICKÁ
ONI. K.E. TSIOLKOVSKÝ
Katedra "elektroniky a informatiky"
TROJFÁZOVÉ ASYNCHRONICKÉ MOTORY
Metodické pokyny pre laboratórne práce v sadzbe:
"Elektronika a elektrotechnika"
Zostavil A.L. Marčenko
MOSKVA 2005
CIEĽ PRÁCE
Na odstránenie a vytvorenie mechanických a výkonových charakteristík trojfázového asynchrónneho motora (AM); študovať modely krvného tlaku a skúmať ich prácu v prechodných režimoch.
TEORETICKÉ USTANOVENIA A VZORCE VÝPOČTOV
1. ŠTRUKTÚRA A PRINCÍP PREVÁDZKY PEKLA
V priemysle sa najviac využívajú trojfázové asynchrónne motory (obr. 19.1). Je to spôsobené tým, že sú konštrukčne jednoduché, lacné, spoľahlivé v prevádzke, majú vysokú účinnosť pri menovitom zaťažení, odolávajú značnému preťaženiu a nevyžadujú zložité štartovacie zariadenia.
H  Spolu s výhodami krvného tlaku majú množstvo nevýhod, z ktorých hlavné sú: nízky účinník (cos
) pri čiastočnom zaťažení (bez zaťaženia cos
0
= 0,2 ... 0,3); nízka účinnosť pri nízkom zaťažení; neuspokojivé vlastnosti nastavenia.
Spolu s výhodami krvného tlaku majú množstvo nevýhod, z ktorých hlavné sú: nízky účinník (cos
) pri čiastočnom zaťažení (bez zaťaženia cos
0
= 0,2 ... 0,3); nízka účinnosť pri nízkom zaťažení; neuspokojivé vlastnosti nastavenia.
O 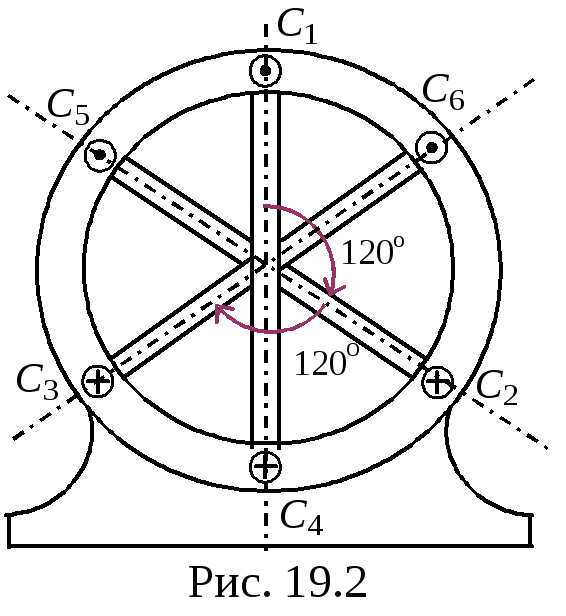 Hlavnými časťami IM sú stator a rotor, ktoré sú od seba vzdialené vzduchovou medzerou (0,3 ... 0,5 mm). Ich jadrá sú zostavené z elektrotechnických oceľových plechov. Na vnútornej časti povrchu statora a na vonkajšom rotore sú vyrazené drážky, do ktorých sú uložené vinutia. Jadro statora je uložené v puzdre, na ktorom sú upevnené vývody vinutia statora, ktoré pozostáva z troch nezávislých vinutí posunutých v priestore o 120 (obr. 19.2). Jadro rotora je namontované priamo na hriadeli motora alebo na náboji nasunutom na hriadeli.
Hlavnými časťami IM sú stator a rotor, ktoré sú od seba vzdialené vzduchovou medzerou (0,3 ... 0,5 mm). Ich jadrá sú zostavené z elektrotechnických oceľových plechov. Na vnútornej časti povrchu statora a na vonkajšom rotore sú vyrazené drážky, do ktorých sú uložené vinutia. Jadro statora je uložené v puzdre, na ktorom sú upevnené vývody vinutia statora, ktoré pozostáva z troch nezávislých vinutí posunutých v priestore o 120 (obr. 19.2). Jadro rotora je namontované priamo na hriadeli motora alebo na náboji nasunutom na hriadeli.
Vinutie rotora môže byť skratované alebo trojfázové podobne ako vinutie statora. Skratované vinutie rotora je vyrobené vo forme "veveričkového kolesa", pozostávajúceho z tyčí a uzatvárajúcich ich na koncoch krúžkov (obr. 19.3, a a b). V PEKLE s fázový rotor(pozri obr. 19.1, v) niektoré konce o 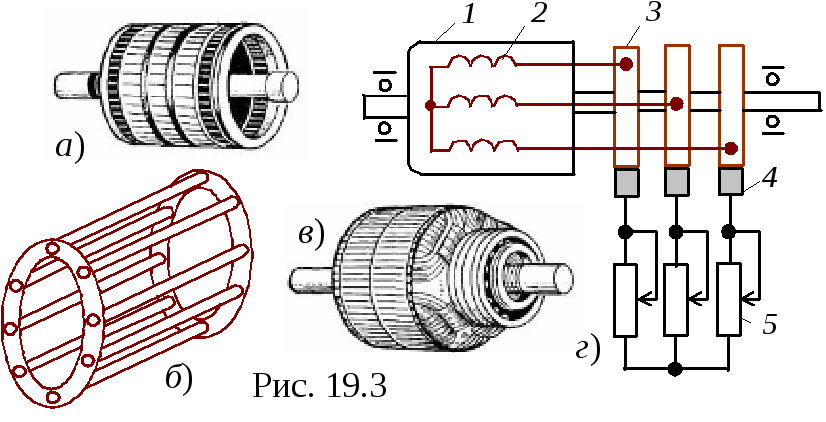 navijak 2
rotor 1
spojte pomocou zberacích krúžkov 3
umiestnené na hriadeli motora, zatiaľ čo ostatné sú pripojené do hviezdy (obr.19.3, v a G). Sklzné krúžky 3
pripojené ku kontaktom stacionárnej časti stroja pomocou kefiek 4
a držiaky kefy. K nim je pripojený štartovací reostat 5.
navijak 2
rotor 1
spojte pomocou zberacích krúžkov 3
umiestnené na hriadeli motora, zatiaľ čo ostatné sú pripojené do hviezdy (obr.19.3, v a G). Sklzné krúžky 3
pripojené ku kontaktom stacionárnej časti stroja pomocou kefiek 4
a držiaky kefy. K nim je pripojený štartovací reostat 5.
Princíp fungovania krvného tlaku je založený na interakcii rotácie magnetické pole statora (stacionárna časť stroja) s prúdmi indukovanými v rotore (pohyblivá časť).
Zvážte princíp vytvárania magnetického poľa stroja. Trojfázové vinutie statora je napájané z trojfázový systém napätie (pozri obr.19.1, a) s fázové napätia U 1 f... Keďže tri fázové vinutia (posunuté v priestore voči sebe o 120 (obr. 19.2) a majúce počet závitov w 1) sú uzavreté, potom v nich prúdia prúdy i 1, v dôsledku toho sa vytvoria tri MDS F 1 = i 1 w 1. Pôsobením týchto troch MDS vzniká rotujúce magnetické pole, ktorého výsledný vektor magnetického toku je F R = 3/2F m, kde F m - magnetický tok vytvorený fázou MDS F 1 .
Podľa zákona elektromagnetickej indukcie sa EMF indukuje vo vinutí statora a rotora e 1 a e 2. Obvod vinutia rotora je vždy uzavretý, preto vo fázových vinutiach rotora tečú prúdy i 2, ktorých hodnoty závisia od zaťaženia. Podľa Ampérovho zákona z interakcie rotorových prúdov s rotujúcim magnetickým poľom statora vzniká krútiaci moment na hriadeli motora. M, a ak je to viac ako moment odporu M s na hriadeli sa rotor začne otáčať. Podľa Lenzovho pravidla prúdy rotora, podobne ako rotujúce magnetické pole, ktoré vytvárajú, ovplyvňujú prúdy vinutia statora a magnetický tok. F R stroja, čo spôsobuje zvýšenie prúdu statora, aby sa kompenzoval demagnetizačný účinok prúdov vo vinutí rotora.
Frekvencia rotujúceho magnetického poľa statora (v otáčkach za minútu) je určená výrazom: 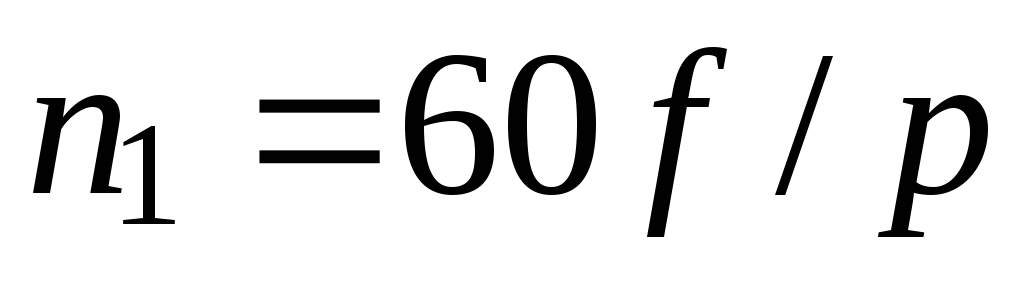 , kde f 1
- frekvencia sieťového napätia napájajúceho motor; R- počet párov pólov stroja (najmä tri statorové vinutia tvoria jeden pár pólov, šesť vinutí dva páry atď.).
, kde f 1
- frekvencia sieťového napätia napájajúceho motor; R- počet párov pólov stroja (najmä tri statorové vinutia tvoria jeden pár pólov, šesť vinutí dva páry atď.).
Príslušný stroj sa nazýva asynchrónny, pretože rýchlosť rotora v ňom je n 2 sa nerovná frekvencii rotujúceho magnetického poľa statora n 1. Ak by boli tieto frekvencie rovnaké, potom by magnetický tok statora bol stacionárny vzhľadom na rotujúci rotor a EMF by sa neindukovalo vo vinutiach rotora, neboli by v nich žiadne prúdy a na hriadeli by nebol žiadny krútiaci moment.
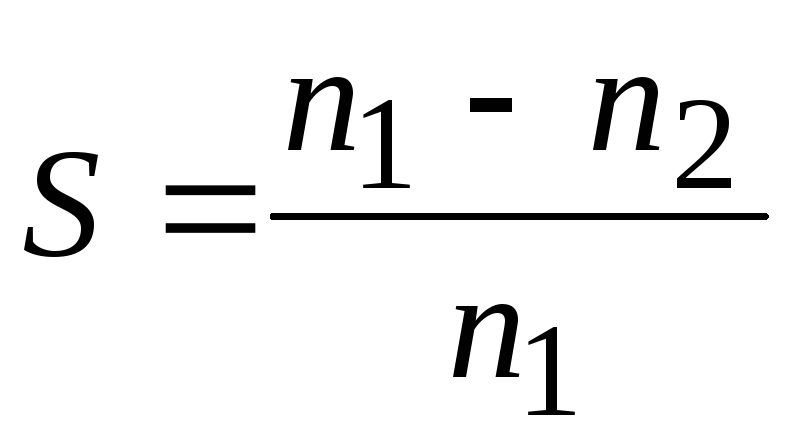
Rozdiel medzi rotačnými frekvenciami poľa statora a rotora sa nazýva sklzová frekvencia n s = n 1 - n 2 a jeho vzťah k frekvencii n 1 - posúvaním S, t.j.
 alebo (vyjadrené v percentách)
alebo (vyjadrené v percentách) 
Rozsah zmeny sklzu v asynchrónnom motore 1 S 0; pri spustení S = 1, pri voľnobehu S= 0,001 ... 0,005, pri menovitom zaťažení S = 0,03...0,07.
2. HLAVNÉ CHARAKTERISTIKY PEKLA
Jednou z hlavných charakteristík krvného tlaku je mechanická charakteristika n 2 = f(M) - závislosť frekvencie otáčania n 2 od tejto chvíle M na hriadeli motora (obr.19.4). Prirodzené mechanické vlastnosti 1 (pozri obr. 19.4 a obr. 19.5) indukčného motora je opísaná rovnicou
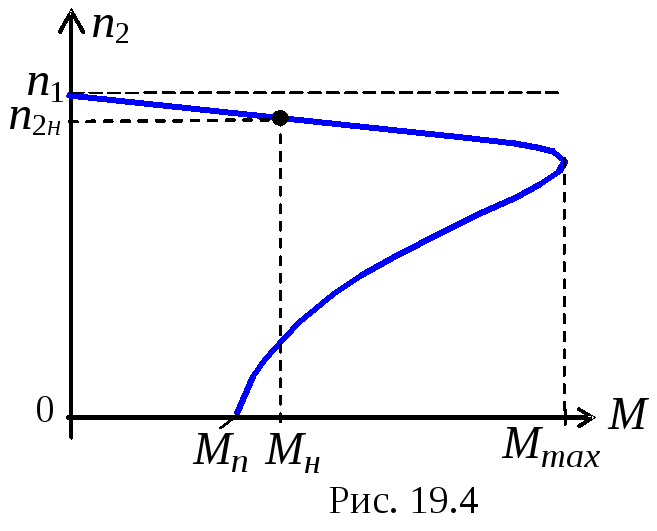
S nárastom zaťaženia hriadeľa, sklzu S sa zvyšuje a rýchlosť rotora klesá o 5 ... 10%, t.j. mechanická charakteristika n= ¦ ( M) PEKLO je tvrdé (pozri obr. 19.4);
Zmena smeru otáčania rotora IM - reverzácia - sa vykonáva prepnutím ľubovoľných dvoch vodičov trojfázového systému napájajúceho motor.
Krútiaci moment AM je úmerný druhej mocnine fázového napätia U 1 f siete a závisí od sklzu S, t.j.
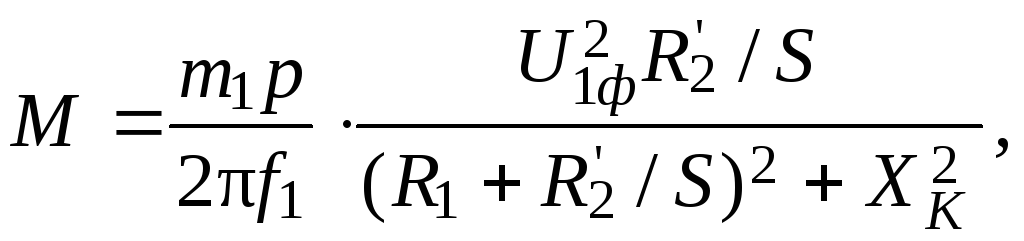
kde m 1 - počet fáz statora; NS TO
=
X 1
+ ;
R 1 ,
X 1 a
;
R 1 ,
X 1 a  ,- aktívny, indukčný odpor vinutia statora a znížené odpory vinutia rotora.
,- aktívny, indukčný odpor vinutia statora a znížené odpory vinutia rotora.
S nárastom momentu odporu M s na hriadeli sa zvyšuje sklz, čo vedie k zvýšeniu krútiaceho momentu na hodnotu M s... Posuv, pri ktorom krútiaci moment dosiahne svoju maximálnu hodnotu M max, sa nazýva kritický a nachádza sa podľa výrazu S cr /NS TO .
Kritické hodnoty sklzu S cr a rozbehový krútiaci moment M NS závisí od odporu obvodu rotora (pozri krivky 2
…4
na obr. 19.5) a moment M NS rastie s nárastom  dosahovanie M max pri +
dosahovanie M max pri +
NS TO, kde je znížený odpor štartovacieho reostatu používaného pri IM s vinutým rotorom na zníženie štartovacieho prúdu, zvýšenie štartovacieho momentu (pozri krivku 4
na obr. 19,5, b), ktorý zabezpečuje hladký rozbeh a reguláciu otáčok rotora (pozri reostatické mechanické charakteristiky 2
…4
na obr. 19,5, b).
NS TO, kde je znížený odpor štartovacieho reostatu používaného pri IM s vinutým rotorom na zníženie štartovacieho prúdu, zvýšenie štartovacieho momentu (pozri krivku 4
na obr. 19,5, b), ktorý zabezpečuje hladký rozbeh a reguláciu otáčok rotora (pozri reostatické mechanické charakteristiky 2
…4
na obr. 19,5, b).
3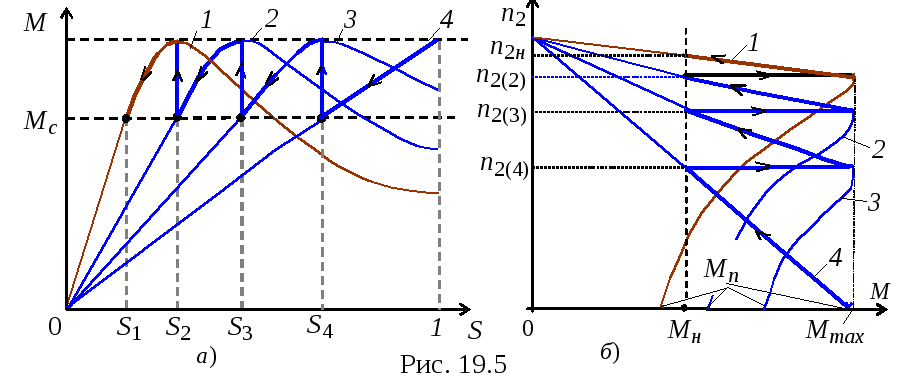 ... PREVÁDZKOVÉ CHARAKTERISTIKY PEKLA
... PREVÁDZKOVÉ CHARAKTERISTIKY PEKLA
 Výkon asynchrónneho motora je možné posúdiť podľa jeho výkonu, ktorý je znázornený krivkami vyjadrujúci grafické závislosti od čistého výkonu. R 2 množstvá: aktuálne ja 1 vo vinutí statora, účinnosť
, šmyk S, účinník cos
, užitočný moment M
na šachte BP pri U 1
=
konšt
a f 1
=
konšt(obr.19.6). Stanovujú sa experimentálne alebo výpočtom pomocou ekvivalentného obvodu asynchrónny motor.
Výkon asynchrónneho motora je možné posúdiť podľa jeho výkonu, ktorý je znázornený krivkami vyjadrujúci grafické závislosti od čistého výkonu. R 2 množstvá: aktuálne ja 1 vo vinutí statora, účinnosť
, šmyk S, účinník cos
, užitočný moment M
na šachte BP pri U 1
=
konšt
a f 1
=
konšt(obr.19.6). Stanovujú sa experimentálne alebo výpočtom pomocou ekvivalentného obvodu asynchrónny motor.
Výkon pri nečinnosti R 2 = 0; kým prúdy vinutia statora ja 0, ktoré vytvárajú rotujúce magnetické pole, sú pomerne veľké a dosahujú 30 ... 50% menovitých prúdov ja 1 n... Rýchlosť rotora n 20 = = (0,995…0,998) n 1 .
So zvyšujúcim sa zaťažením hriadeľa sa zvyšuje statorový prúd, ako aj aktívny výkon R 2 a R 1. Na druhej strane sa zvyšuje účinník  ... V tomto prípade sklz S zvyšuje a rýchlosť hriadeľa n 2 klesá, pretože to je jediný dôvod zvýšenia prúdu a elektromagnetického krútiaceho momentu.
... V tomto prípade sklz S zvyšuje a rýchlosť hriadeľa n 2 klesá, pretože to je jediný dôvod zvýšenia prúdu a elektromagnetického krútiaceho momentu.
Závislosť M = f(R 2) sa určuje podľa vzorca M = 9550R 2 /n 2, z čoho vyplýva, že táto závislosť je mierne zakrivená priamka prechádzajúca počiatkom, keďže s nárastom zaťaženia hriadeľa sa frekvencia otáčania rotora IM mierne znižuje.
Charakter závislosti účinníka IM od výkonu hriadeľa, t.j. cos
=
f(R 2) sa určuje výrazom cos
= P 1 / a rovná sa 0,8 ... 0,89 pre normálny priemerný výkon IM pri menovitom zaťažení. S klesajúcim zaťažením hriadeľa cos
klesá a dosahuje hodnoty 0,2 ... 0,3 pri voľnobehu. V tomto režime je čistý výkon na hriadeli nulový, avšak motor čerpá energiu zo siete, preto čos
0
tu sa nerovná nule.
a rovná sa 0,8 ... 0,89 pre normálny priemerný výkon IM pri menovitom zaťažení. S klesajúcim zaťažením hriadeľa cos
klesá a dosahuje hodnoty 0,2 ... 0,3 pri voľnobehu. V tomto režime je čistý výkon na hriadeli nulový, avšak motor čerpá energiu zo siete, preto čos
0
tu sa nerovná nule.
Charakteristika účinnosti h = f(R 2) PEKLO stúpa veľmi rýchlo z nuly (naprázdno) na 0,4 ... 0,5 menovitého zaťaženia a dosahuje najvyššiu hodnotu (0,85 ... 0,95.) V rozsahu od 0,7 do 0,8 menovitého zaťaženia a potom pomaly klesá v dôsledku nárastu premenných strát (pozri obrázok 19.6).
4. STRUČNÝ POPIS MODELOV PEKLA
ÚLOHY A METODICKÉ POKYNY K NIM
IMPLEMENTÁCIA
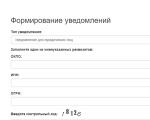
Úloha 1. Zoznámte sa s rozhraním skúšobného modelu IM (obr. 19.7), špecifikujte účel okien (polí), vrátane tých, ktoré sú vybavené šípkami na zmenu napríklad momentu odporu na hriadeli, odporu štartovacieho reostatu, výber schémy zapojenia statorových vinutí a tiež okienka výstupných veličín, ktoré simulujú odčítanie meracích prístrojov.
Podľa možnosti N vyberte typ motora (pre nepárne varianty z tabuľky 1, AM s rotorom nakrátko a pre párne - z tabuľky 2, AM s fázovým rotorom, kde N- sa zhoduje s číslom zápisu priezviska študenta v študijnom denníku skupiny), do protokolu zapíšte jeho menovitý údaj: menovitý mechanický výkon R n = R 2 n na hriadeli, medzifázové napätie U n a jeho frekvenciu f 1, menovitý prúd ja n, menovité otáčky hriadeľa n n, Účinnosť n, menovitý účinník cos n, počet pólových párov R rotujúce magnetické pole statora.
Úloha 2. Vykonajte „naštartovanie“ krvného tlaku (spustite program na modelovanie a výpočet parametrov krvného tlaku) a „odstráňte“ mechanické a prevádzkové charakteristiky krvného tlaku. Do tohto konca:
Kliknite na tlačidlo "Štart", to znamená "pripojte" vinutie statora IM trojfázová sieť striedavý prúd a napíšte do riadku 1 tabuľky. 19,1 hodnoty sieťového napätia U 1, linkový prúd ja 1, činný výkon R 1, "spotrebované" HELL zo siete, otáčky rotora n 2 v režime voľnobehu (užitočný krútiaci moment na hriadeli M= 0), ktoré sa zobrazujú v príslušných poliach na obrazovke;
- "odstrániť" mechanické n 2 = f(M) a pracovníci ja 1 = f(R 2), čos = f(R 2), S = f(R 2), R 1 = f(R 2), M= f(R 2), h = f(R 2) charakteristika motora.
Ak chcete odstrániť vlastnosti, musíte:
Kliknite na tlačidlo "Load On" umiestnené v spodnej časti pracovného poľa modelu AM, tj "pripojte" obvod vinutia poľa elektromagnetickej brzdy k sieti;
Postupné zvyšovanie momentu odporu (zaťaženia) M na hriadeli BP zapíšte do tabuľky. 19.1 indikácie "meracích zariadení" pri 8 ... 9 momentálnych hodnotách M: z pohotovostného režimu ( M = 0, R 2 = 0) k hodnote M = (1,2...1,5)M n alebo R 2 = (1,2...1,5)R 2 n .
Tabuľka 19.1
|
merania |
Výsledky merania |
Výsledky výpočtu |
|||||||
Pozorovanie zmeny zaťaženia na hriadeli je možné vykonať pomocou hodnôt momentu M a hodnoty výkonu R 1, spotrebované HELL zo siete. Napríklad pre asynchrónny motor s parametrami: R 2 n = 0,55 kW, h n = 0,705 a R 1 n = R 2 n /h n= 0,55 / 0,705 = 0,78 kW zmeny výkonu budú od R 0 (kľudový výkon) až R 1 = 1,1 ... 1,15 kW.
Úloha 3. Na základe údajov o modelovaní procesov v IM vypočítajte užitočný výkon P 2 na hriadeli, posuvné S, účinník cos a efektívnosť h motor pri rôznych zaťaženiach pomocou nasledujúcich výpočtových vzorcov:
 = P 2 /R 1; cos
= P 1 /
= P 2 /R 1; cos
= P 1 / ,
,
Rozšírené v rôznych priemyselných odvetví Národné hospodárstvo dostali trojfázové asynchrónne motory s rotor vo veveričke... Nemajú klzné kontakty, sú jednoduché v dizajne a údržbe Motor s explodovanou klietkou nakrátko je znázornený na obr. 1. Jeho hlavnými časťami sú stator a rotor. Jadrá statora a rotora sú vyrobené z elektrooceľových plechov.
V drážkach jadra statora je položené a upevnené trojfázové vinutie , V závislosti od napätia napájacej siete a údajov motora je spojené hviezdou alebo trojuholníkom. Svorky vinutia statora sú označené, čo uľahčuje zostavenie požadovaného schémy zapojenia.
V súlade s GOST 183-74 * sa prijímajú nasledujúce označenia svoriek vinutí jednotlivých fáz, v tomto poradí, začiatok a koniec prvej fázy C1 a C4, druhá - C2 a C5 a tretia - SZ a C6 (obr. 2). Usporiadanie svoriek na svorkovnici motora musí spĺňať požiadavku na jednoduché pripojenie vinutí podľa ľubovoľnej schémy Vinutie rotora nie je izolované od jadra. Spolu s ventilačnými lopatkami je odlievaný z hliníka alebo jeho zliatin. Navíjacie tyče a skratovacie krúžky tvoria takzvanú klietku na veveričku.
Konštrukcia motorov závisí od spôsobu vetrania a stupňa ochrany.
Asynchrónne motory s klietkou vo veveričke z jednej série 4A, pokiaľ ide o spôsob chladenia a stupeň ochrany personálu pred kontaktom so živými alebo rotujúcimi časťami, ako aj samotného stroja pred vniknutím cudzích telies do neho, majú dve verzie (GOST 14254-80): uzavreté fúkané (označenie IP44), chránené (označenie IP23) ...
Motory v prevedení IP44 majú axiálny ventilačný systém. Vzduch je privádzaný ventilátorom a fúka cez vonkajší rebrovaný povrch lôžka.
Pre motory IP23 je charakteristický obojstranný radiálny ventilačný systém, ktorý sa vykonáva pomocou ventilačných lopatiek umiestnených na skratovacích rotorových krúžkoch.
Ryža. 1 Rozložený pohľad na indukčný motor s veveričkovou klietkou
1 - stator, 2 - svorkovnica, 3 - rotor 4 - koncové štíty, 5 - ventilátor, 6 - kryt ventilátora
Motory tejto série majú nasledujúcu štruktúru označenia: 4 - sériové číslo série; A - názov typu motora - asynchrónny; A - rám a štíty vyrobené z hliníka; X - hliníkový rám a liatinové štíty; 56-355 - výška osi otáčania; S, L, M - inštalačné rozmery pozdĺž dĺžky tela; A, B - označenie dĺžky jadra (prvá dĺžka je A, druhá je B); 2, 4, 6, 8, 10, 12 - počet pólov; У - klimatická úprava motorov; 3 - kategória umiestnenia. Napríklad: 4АА56А2УЗ - elektromotor série 4, asynchrónny, uzavretý dizajn, rám a koncové štíty vyrobené z hliníka, s výškou osi otáčania 56 mm, jadro prvej dĺžky, dvojpólové, pre oblasti mierneho podnebia, umiestnenie kategória 3.
Obr. 2 Umiestnenie svoriek na kryte motora pri pripojení: a - hviezdou; b - trojuholník 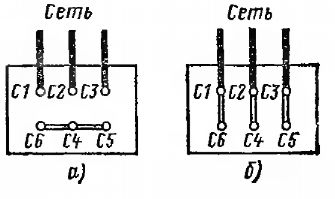
stôl 1
typ motora |
Menovitý výkon, kW |
||
n = 3000 ot./min |
|||
n = 1500 ot./min |
|||
n = 1000 ot./min |
|||
Pokračovanie tabuľky. 1
typ motora |
Menovitý výkon, kW |
||
Hlavné technické údaje motorov s nízkym výkonom radu 4A sú uvedené v tabuľke. 1.
Bola vyvinutá a vyrobená jediná séria indukčných motorov AI. Zlepšenie energetických, štartovacích a vibračných hlukových charakteristík strojov tejto série je dosiahnuté použitím nových materiálov a konštrukčných riešení.
Hlavné technické údaje motorov s nízkym výkonom radu AI sú uvedené v tabuľke. 2.
Trojfázový prúd, prechádzajúci cez vinutia statora, vytvára rotujúce magnetické pole. Frekvencia rotácie poľa n sa nazýva synchrónna. Závisí to od frekvencie fi napájacieho napätia a počtu pólových párov p stroja: ![]()
a pri f 1-50 Hz nadobúda hodnoty: 3000 ot/min (p- == 1), 1500 ot/min (p = 2), 1000 ot/min (p = 3) atď.
Pre frekvenciu sieťového napätia budeme mať: 
Rotor indukčného motora, ktorý sa otáča v smere otáčania poľa, vyvíja frekvenciu o niečo nižšiu ako synchrónna, nazývaná asynchrónna.
tabuľka 2
typ motora |
Menovitý výkon, kW |
Synchrónna frekvencia otáčania, r / w<н |
||
AIR80A2-OM2 |
||||
AIR80V4-OM2 |
||||
AIR80A6-OM2 |
||||
AIR80V6-OM2 |
||||
Oneskorenie rotora je charakterizované sklzom s. Ak je rýchlosť rotora označená ri2, potom vzťah sklzu nadobúda tvar 
alebo %, %, 
Z (2) vyplýva, že sklz indukčného motora sa mení z jednoty (pri štarte, keď n2-0) na nulu (pri synchrónnej rýchlosti, t.j. keď P2-P1). Všimnite si, že nie je dosiahnutá presná rovnosť frekvencie otáčania poľa a rotora v režime motora. Oneskorenie rotora pri voľnobežných otáčkach stroja je však také malé, že ho možno zanedbať. Hodnoty sklzu pri plnom zaťažení motora sú zvyčajne 4-6%.
Vyjadrenie rýchlosti rotora možno získať zo vzťahu (2):
Všimnite si, že čitateľ na pravej strane rovnosti (2) má určitý fyzikálny význam. Rozdiel medzi rýchlosťou otáčania poľa a rotora je relatívna rýchlosť otáčania, t. j. frekvencia otáčania poľa vzhľadom na rotor ns alebo frekvencia sklzu.
Príklad. Známe „1 = 1000 ot./min, s = 4 %. Vypočítajte rýchlosť rotora a relatívnu rýchlosť.
Máme: la = 1000 (1-0,04) = 960 ot./min., ns = nl-n2 = 1000-960 = = 40 ot./min.
Frekvencia EMF a prúdov indukovaných vo vinutí rotora rotujúcim magnetickým poľom je určená frekvenciou sklzu: 
Pomocou jednoduchých transformácií sa tento výraz zredukuje na formu
tie. frekvencia EMF a rotorových prúdov za podmienky ft - const je úmerná sklzu.
Príklad. Nájdite aktuálnu frekvenciu rotora pre predchádzajúci príklad.
Máme - / 2 = / lS = 50-0,04 = 2 Hz.
Výkon generovaný motorom je úmerný sklzu pri normálnom zaťažení. Preto môže byť zaťaženie stroja posudzované podľa sklzu. ![]()

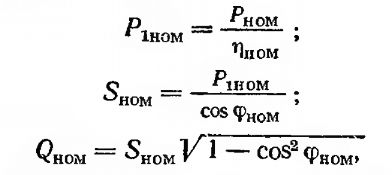
Využitie výkonu motora počas jeho prevádzky môže byť rôzne. Faktor využitia energie ![]()
kde Pg je užitočný výkon pri ľubovoľnom zaťažení; Rnom je menovitý výkon, t. j. čistý výkon, na ktorý je elektrický stroj navrhnutý.
Menovitý výkon zodpovedá menovitému napätiu. Motor spotrebúva menovitý prúd s menovitými hodnotami otáčok, výkonu hriadeľa, účinnosti a cos φ.
Účelom motora je premieňať elektrickú energiu na mechanickú energiu. Počas procesu konverzie dochádza k stratám. Predstavujú tú časť aktívneho výkonu, ktorá sa vynakladá na ohrev vinutia, ocele jadra statora a na prekonanie trecích síl.
Pomer užitočného výkonu P2 vyvinutého motorom na hriadeli k aktívnemu výkonu P \, ktorý spotrebúva zo siete, sa nazýva účinnosť: ![]()
Motor okrem aktívneho spotrebúva reaktívny magnetizačný výkon, ktorý je potrebný na vytvorenie magnetického toku. Celkový výkon motora 5 teda pozostáva z aktívnych a reaktívnych komponentov: 
kde Q je jalový výkon motora.
Relatívna hodnota prevedeného výkonu sa posudzuje podľa účinníka. Čím lepší je výkon stroja, tým vyšší je účinník. Na jej výpočet stačí vydeliť aktívny výkon súčtom: 
kde U, I - fázové hodnoty napätia a prúdu.
Príklad. Na štíte trojfázového asynchrónneho motora s rotorom nakrátko sú tieto označenia: D "A. 220 /
380 V, 10,5 / 6,1 A, 2,8 kW, 50 Hz, 2880 ot./min., CDD = 81,5 %, cos 
(v tomto prípade sa rovná 3000 ot./min.), potom sklz pri menovitom zaťažení bude:
Plný výkon motora pri menovitom zaťažení SHom = 3l / nom / nom = 3-220-6,1 "4000 VA = 4 kVA.
Aktívny výkon spotrebovaný motorom pri menovitom zaťažení,
Rxnom = 31 / nom / nom "" F, nom = 3-220-6,1-0,86 = 3,44 kW.
Straty motora pri menovitom zaťažení
2Drish = Rtsh - P2 = 3,44 - 2,8 = 0,64 kW.
Použitie údajov v tabuľke. 1 sú znázornené krivky závislosti účinníka motorov od ich menovitého výkonu (obr. 3).
Krivka 1 zodpovedá synchrónnym otáčkam 3000 ot./min., 2 až 1500 ot./min. a 3 až 1000 ot./min. Obr. 3 je vidieť, že účinník indukčného motora závisí od menovitého výkonu a synchrónnych otáčok.
S nárastom výkonu pri konštantnej synchrónnej rýchlosti ("! = Const) sa relatívna hodnota vzduchovej medzery znižuje. Vďaka tomu sa znižuje aj relatívny jalový magnetizačný výkon a zvyšuje sa účinník. Rovnaký výsledok sa dosiahne zvýšením synchrónnych otáčok pri konštantnom menovitom výkone motora. Rýchlobežné stroje majú menšie rozmery, čo je spôsobené poklesom krútiaceho momentu, výrazne zmenšujú objem vzduchového priestoru medzi jadrami statora a rotora.
Krivky závislosti merného magnetizačného výkonu motorov od nominálnej at - const sú na obr. 4, z ktorého je zrejmé, že čím vyšší je menovitý výkon motora a čím vyššie sú synchrónne otáčky, tým nižší je špecifický magnetizačný výkon.
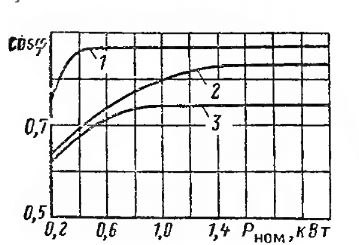
Ryža. 3 Krivky závislosti účinníka od menovitého výkonu asynchrónnych motorov pri rôznych hodnotách synchrónnych otáčok:
1 - "1 = 3000 ot./min.; 2- / 2, -1500 ot./min.; 3 - "1 = 1000 ot./min 
Ryža. 4. Krivky závislosti špecifického magnetizačného výkonu od menovitého výkonu asynchrónnych motorov pri rôznych hodnotách synchrónnych otáčok:
1 - n, > 1000 ot./min.; 2-"1-1500 ot./min.; 3 - "1 = 3000 ot./min
Prechod zo závislostí znázornených na obr. 3, k závislostiam na obr. 4 sa vyrába s použitím nasledujúcich pomerov:
(7)
kde Show, Qhom - plný a jalový výkon motora pri menovitom zaťažení.
Porovnanie obr. 3 a 4 je ľahké vyvodiť záver o vplyve účinníka na energetický výkon motorov a ich napájacieho systému: motory so zvýšeným účinníkom pri danej menovitej záťaži (Pg = Pnom) majú menší jalový magnetizačný výkon. . To vedie k zníženiu celkového výkonu, a teda k zníženiu prúdu spotrebovaného zo siete.
V dôsledku toho sa znížia elektrické straty vo vinutí stroja a obmedzí sa pokles napätia vo vodičoch napájacieho systému.
Priame pripojenie k sieti je spojené s nárazovými prúdmi v obvode statora. To je všeobecne známy fakt. Ale nie každý premýšľal o dôvode tohto javu. Sme zvyknutí na to, že prúd akéhokoľvek elektromotora je priamo úmerný krútiacemu momentu na hriadeli. A zdá sa, že tu je paradoxná situácia: krútiaci moment motora počas štartovania je obmedzený a prúd môže sedemkrát prekročiť nominálnu hodnotu. Ako sa to stane?
Všetko je to o fyzike asynchrónneho stroja. Striedavé elektromagnetické pole statora indukuje EMF vo vinutí rotora motora. Veľkosť tohto EMF v súlade so zákonmi elektromagnetickej indukcie závisí od rýchlosti zmeny elektromagnetického poľa statora, to znamená od frekvencie otáčania tohto poľa vzhľadom na rotor (zo sklzu).
Ak sa však pole statora začne otáčať ihneď po privedení napätia, potom rotor potrebuje nejaký čas na zrýchlenie. A čím je motor výkonnejší a väčší, tým dlhšie trvá zrýchlenie rotora – zvýšená hmotnosť podporuje zotrvačnosť.
Veľkosť sklzu má zase najväčší význam práve v prvom momente spustenia. V tomto momente sa sklz rovná jednotke, rotor je stále nehybný a pole sa už otáča maximálnou rýchlosťou. EMF v obvode rotora dosahuje svoju maximálnu hodnotu, rovnako ako prúd rotora.
Prúd rotora je tiež premenlivý, takže vytvára aj vlastné premenlivé elektromagnetické pole. Toto pole opäť indukuje EMF už v obvode statora motora. A pod vplyvom vyššie uvedeného EMF začne v statore prúdiť dodatočná zložka prúdu, ktorá kompenzuje MDF rotora.
Prúd statora je teda vždy súčtom dvoch ko-smerných zložiek. Hodnota jedného komponentu je spôsobená vlastným odporom vinutia statora. Táto súčiastka má konštantnú hodnotu a pri ideálnom voľnobehu motora sa celý statorový prúd redukuje len na ňu.
A druhá zložka prúdu statora závisí od prúdu v obvode rotora a dosahuje svoje maximum v prvom momente spustenia motora, pričom klesá na nulu, keď sa blíži k bodu ideálneho voľnobehu. Vďaka druhej zložke dosahuje statorový prúd motora pri štartovaní také obrovské hodnoty.
Len jedna nuansa zostáva nejasná: prečo veľký rozbehový prúd indukčného motora neposkytuje taký veľký rozbehový krútiaci moment ako pri jednosmerných motoroch? Dôvodom je, že krútiaci moment motora je vytváraný iba aktívnou zložkou rotorového prúdu, to znamená zložkou, ktorá je vo fáze s EMF rotora.
A pomer aktívneho a reaktívneho prúdu rotora závisí predovšetkým od frekvencie EMF indukovanej vo vinutí rotora. Čím vyššia je frekvencia, tým je prúd „variabilnejší“ a tým dôležitejší je indukčný odpor vinutia rotora. A čím väčší je indukčný odpor vinutia rotora, tým reaktívnejší je prúd rotora.
Áno, štartovací prúd v obvode rotora indukčného motora je veľký, ale je to hlavne jalový prúd, nemôže poskytnúť veľký elektromechanický krútiaci moment. Aktívny prúd dosiahne požadovanú hodnotu až po znížení frekvencie EMF a motor dosiahne svoju prevádzkovú charakteristiku. S tým sú spojené dva problémy rozbehu asynchrónnych motorov: obmedzený rozbehový moment a naopak niekoľkonásobne zvýšený rozbehový statorový prúd.
Maximálna frekvencia EMF rotora dosahuje presne v momente rozbehu, kedy rotor stojí. V tomto okamihu sa EMF rotora mení s frekvenciou napájacej siete - 50 hertzov. Následne, keď motor vstúpi do pracovnej časti charakteristiky, táto frekvencia klesne na niekoľko hertzov a indukčný odpor vinutia prestane byť dôležitý a prúd rotora sa stane takmer úplne aktívnym.

Mýty starovekého Grécka rozprávajú legendu o žiadostivých lesných nymfách-pokušiteľoch, ktoré lákali cestovateľov do...

NASA mala vždy dosť kontroverzné PR. Problémom je zadržiavanie informácií a početné úniky informácií...

V maloobchode sa často vyskytujú prípady, keď je potrebné vrátiť kupujúcemu peniaze. V...
Ahoj! V tomto článku vám povieme, čo je KBK a prečo je to potrebné. Dnes sa dozviete: V ktorých dokumentoch ...

Hustota nehrdzavejúcej ocele, podobne ako iné kovy, ako aj materiály a látky - charakteristika existencie ...

Kedysi ho počúvala celá krajina a zakrývala si uši. Zhudobnený refrén o non-stop sexe a oplzlom slovníku v...
Všetky príjmy a výdavky štátnych rozpočtov sú zaradené do skupín s pridelením identifikačného kódu ....

S príchodom internetu nadobudli všetky oblasti nášho života vyššiu kvalitatívnu úroveň. Platí to pre prácu aj...
Leninovo mauzóleum a čestná nekropola pri kremeľskom múre boli nedávno oslavované ako svätyne svetového významu...

Úvod: Pestovanie húb je najziskovejšie a najziskovejšie poľnohospodárske podnikanie ...
Silní majú vždy na vine tých bezmocných: V histórii na to počujeme veľa príkladov, ale my nepíšeme históriu, ale oh...

Na účely tohto federálneho zákona sa uplatňujú tieto základné pojmy: 1) vzdelávanie je jediné ...

Urum - (grécky Ουρούμ, Urum; Tur.Urum, krymská kat. Urum), azerbajdžanské exoetnonymum Berzen, ...
Hygienické poznatky založené na pozorovaní života vznikli v dávnych dobách. Prvý ...

3.017 Henry Fielding, Príbeh Toma Jonesa, nálezcu Henry Fielding (1707-1754) Slávny anglický publicista ...

Rok napísania: 1929 Čas čítania: Popis diela: Román „Peter prvý“ Alexej Tolstoj nedokončil ....