Minerály Doneckej oblasti
"Takmer každý deň naši vedci, skúmajúc útvary zeme, nájdu v ňom všetky nové obrovské zásoby uhlia, ...
V elektrických inštaláciách existujú polohy, keď nie je možné robiť bez elektrického motora bežiaceho na jednosmerný prúd. Tento elektromotor je možné nastaviť pomocou otáčok rotora, ktoré sa vyžadujú v elektrických inštaláciách. Je pravda, že má veľa nedostatkov a jedným z nich je rýchle opotrebovanie štetcov, ak ich inštalácia bola vykonaná s krivosťou a ich životnosť je dosť nízka. Pri opotrebovaní dochádza k iskreniu, takže tento motor nie je možné použiť vo výbušných a prašných miestnostiach. Plus, jednosmerný motor je drahý. Ak chcete zmeniť túto situáciu, použite asynchrónny motor a frekvenčný regulátor pre asynchrónny motor.
Takmer vo všetkých ohľadoch elektromotory pracujúce na striedavom prúde prevyšujú svoje protipólové na konštantnom prúde. Po prvé, sú bezpečnejšie. Po druhé, majú menšie rozmery a hmotnosť. Po tretie, cena je nižšia. Po štvrté, sú ľahšie ovládateľné a pripojiteľné.
Ale majú jednu nevýhodu - je to ťažké ovládanie otáčok. V tomto prípade nie sú vhodné štandardné metódy regulácie frekvencie asynchrónnych motorov, menovite zmeny napätia, inštalácia odporu atď. Frekvenčné riadenie asynchrónneho elektromotora - bol problém číslo jedna. Hoci je teoretický základ známy už v tridsiatych rokoch minulého storočia. Celá vec sa opierala o vysoké náklady na frekvenčný menič. Všetko sa zmenilo, keď boli vynájdené čipy, s pomocou ktorých bolo možné pomocou tranzistorov zostaviť frekvenčný menič s minimálnymi nákladmi.
Takže spôsob riadenia otáčok asynchrónneho motora je založený na jedinom vzorci. Tu je to nižšie.
ω = 2πf / p, kde
To znamená, že je možné zmeniť rýchlosť otáčania elektrického motora iba zmenou frekvencie napätia. Čo to robí v praxi? Prvým je plynulosť motora, hlavne pri štarte zariadenia, keď samotný motor pracuje pod najvyššou záťažou. Druhým je zvýšenie sklzu. Z tohto dôvodu sa zvyšuje účinnosť a charakteristiky straty výkonu klesajú.
Všetky moderné frekvenčné meniče sú založené na princípe tzv. Dvojitého prevodu. To znamená, že striedavý prúd sa prevedie na DC prostredníctvom nespravovaného usmerňovača a filtra. Ďalej, prostredníctvom impulzného meniča (to je trojfázový), dochádza k opačnej transformácii jednosmerného prúdu na striedavý prúd. Samotný invertor pozostáva zo šiestich spínačov napájania (tranzistor). Každé navíjanie elektrického motora je preto spojené s určitými klávesami usmerňovača (pozitívne alebo negatívne). Invertor mení frekvenciu napätia, ktoré sa používa na vinutie statora. V skutočnosti je prostredníctvom neho dochádza k frekvenčnej regulácii motora.

V tomto zariadení sú nainštalované výstupné tranzistory. Vykonávajú úlohu kľúčov. Ak ich porovnáme s tyristormi, treba poznamenať, že prvý produkuje signál vo forme sínusoidu. Práve táto forma vytvára minimálne skreslenie.
Teraz princíp fungovania frekvenčného meniča. Aby sme to pochopili, navrhujeme rozobrať obrázok nižšie.
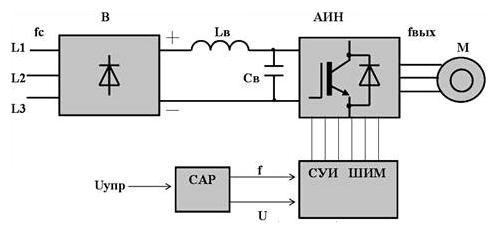
Prejdime teda po obrázku, kde
Podľa schémy je veľmi jasné, že menič nastavuje frekvenciu napätia vďaka systému kontroly šírky impulzov (je to vysokofrekvenčný). Práve táto časť regulátora je zodpovedná za striedavé pripojenie statorových vinutí elektromotora k kladnému pólu usmerňovača a potom k zápornému. Frekvencia pripojenia k pólom sa vyskytuje v sínusovej krivke. Frekvencia impulzov je určená frekvenciou PWM. Takto dochádza k regulácii frekvencie.
V posledných 10-25 rokoch bolo jasné, že sa pohybuje od jednosmerného meniča po striedavý prúd, a to vďaka zdokonaleným zákonom o riadení striedavých motorov a vývoji výkonovej elektroniky.
Použitie striedavých motorov pre ich jednoduchosť, nízke náklady, zvýšenú spoľahlivosť, výrazne menšie rozmery a hmotnosť v porovnaní s jednosmernými motormi. Nevýhody riadenia rýchlosti možno pripísať vysokej zložitosti teórie AC strojov a riadiacich algoritmov, ktoré sú zakotvené v konvertorovom zariadení.
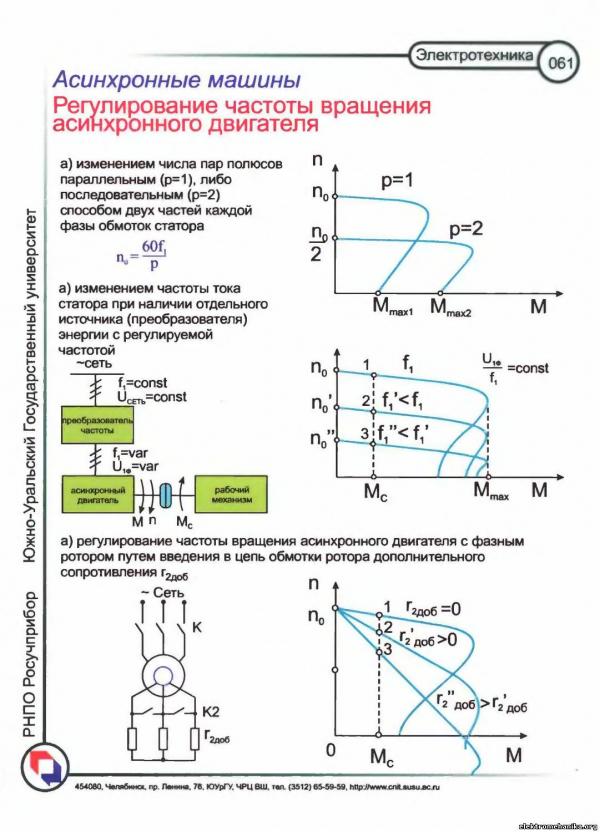
Najpoužívanejšie sú nasledujúce metódy riadenia uhlovej rýchlosti indukčného motora: 1) odporová; 2) kolísanie napätia na stator; 3) prepínanie počtu dvojíc pólov; 4) zmena frekvencie napájacieho napätia atď.
Regulácia reostatov
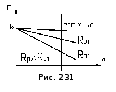
Schéma zaradenia krvného tlaku do tejto metódy regulácie je uvedená nižšie. Reostatové charakteristiky sa získajú zavedením dodatočného odporu do okruhu rotora. Súčasne so zvyšujúcim sa odporom klesá tuhosť MX.
Prípustný rozsah riadenia rýchlosti pomocou tejto metódy
Odvtedy, potom približne
![]() ,
,
kde je relatívna veľkosť zmeny rýchlosti; - relatívna veľkosť zmeny momentu.
Zo získaného vzorca možno vidieť, že pri rovnakých relatívnych odchýlkach uhlovej rýchlosti a zaťažovacieho krútiaceho momentu je kontrolný rozsah. Pri nižšej tolerancii uhlovej rýchlosti je rozsah ešte menší.
Výpadky energie pri reostatickej regulácii pozostávajú z premenlivých strát, vrátane strát v statorovej a rotorovej medi a vo vonkajších odporoch rotorového obvodu, a trvalé straty nezávislé od zaťaženia. Celková trvalá strata motora zostáva približne rovnaká bez ohľadu na zaťaženie a otáčky motora.
Elektromagnetická a mechanická energia pre AD
![]() ; ,
; ,
odtiaľ môžete určiť stratu v rotoru
Je zrejmé, že straty sú úmerné množstvu sklzu a sú rozdelené v pomere k pomeru rotorových odporov motora a prídavného odporu v obvode rotora, a preto motor s reostatickou reguláciou môže vyvinúť krútiaci moment rovnajúci sa nominálnemu.
Nevýhody reostatickej regulácie rýchlosti sú regulácia stupňovej rýchlosti a použitie dodatočného zariadenia, nízka rýchlosť a veľké straty energie počas regulácie.
Regulácia uhlovej rýchlosti krvného tlaku zmenou napätia na stator
Pri zmene veľkosti prvej harmonickej sa veľkosť kritického momentu mení s konštantným kritickým skĺznutím.
Takáto zmena sa dosiahne použitím tyristorového meniča napätia (ESRT).
Maximálny moment s klesajúcim napätím klesá v pomere k štvorcu napätia:
 ,
,
kde je kritický moment pri zníženom napätí; - nízke napätie.
Z obr. možno vidieť, že obmedzenia riadenia rýchlosti sú veľmi obmedzené, dokonca aj pri zaťažení ventilátora.
Na rozšírenie rozsahu používajú ACS s uzavretou slučkou, ktorej blokové schéma je znázornené na obr. nižšie. Snímač rýchlosti (BR) a regulátor rýchlosti, ktorý prijíma rozdiel medzi nastavenou a aktuálnou hodnotou rýchlosti, sa dostanú na tento SAR. Výstup regulátora rýchlosti vytvára signál aplikovaný na vstup riadiaceho systému impulznej fázy, ktorý vytvára riadiace impulzy pre ESR. Zvláštnosť takejto regulácie spočíva v tom, že všetky charakteristiky sa zbiehajú v mieste synchronnej rýchlosti, a preto čím je rýchlosť nižšia, tým väčší je sklz a väčšia strata v motore. Mechanické charakteristiky motora s fázovým riadením v uzavretej rýchlosti SAR sú znázornené na obr. 5.11.
Motor s touto metódou regulácie môže pracovať dlho, za predpokladu
Prípustný moment možno nájsť tak, že sa priradí prípustná strata nominálnej hodnote
![]() .
.
Krivka prípustného momentu pre vykurovanie je znázornená na obrázku 5.11.
Táto metóda regulácie sa nemôže uplatňovať na mechanizmy pracujúce v kontinuálnej prevádzke s konštantným zaťažením. Účinné je použitie fázového riadenia pre mechanizmy, pri ktorých statický moment závisí od rýchlosti motora, napríklad pri pohonoch ventilátorov, čerpadiel a kompresorov. Táto metóda je uplatniteľná aj vtedy, keď motor beží krátkymi časmi v nižšej rýchlosti vzhľadom na celý cyklus prevádzky, napríklad výťahy. V tomto prípade je nadhodnotenie inštalovaného výkonu motora malé.
Výhodou fázového riadenia je nižšia cena meniča (FLC) v porovnaní s frekvenčným meničom (FC) rovnakého výkonu, čo umožňuje, aby tieto mechanizmy poskytovali prijateľný proces kvality bez dodatočných nákladov.
5.4.3. Zmeňte počet dvojíc pólov
Z výrazu pre uhlovú rýchlosť krvného tlaku:
![]() ,
,
je zrejmé, že riadenie rýchlosti môže byť vykonané zmenou počtu párov pólov pmotorové statorové vinutia. Keďže táto hodnota môže byť iba celé číslo, regulácia rýchlosti je postupná.
Pre tento typ regulácie sa robia multi-rýchlosť HELL s KZR. V štrbinách statorového jadra sú umiestnené buď dve nezávislé vinutia alebo jeden pól prepínateľný.
Existujú dva hlavné spínacie schémy. Schéma "hviezda / dvojhviezda" (obr. 5.12, I-II) poskytuje reguláciu s konštantnou hybnosťou. Takáto schéma sa odporúča použiť pri elektrickom pohone s konštantným záťažovým krútiacim momentom pri zmene otáčok. Schéma "hviezda / hviezda" (obr.5.12, I-III) tiež dáva dvojitú zmenu počtu párov pólov, avšak regulácia nastane pri konštantnom výkone, to znamená, že pri prepnutí na vyššiu rýchlosť krútiaci moment klesá dvakrát. Takéto schémy sú primerané na použitie v pohonech, kde je moment odporu nepriamo úmerný frekvencii otáčania. Mechanické vlastnosti krvného tlaku pri regulácii rýchlosti zmenou počtu párov plusov sú uvedené na obr. nižšie.
Multi-rýchlostná AD bola široko používaná v elektrických pohonoch, ktoré umožňujú postupnú reguláciu rýchlosti otáčania (pohon výťahu, ventilátory, obrábacie stroje). Výhodou tejto metódy je udržanie vysokej ekonomickej výkonnosti pri prechode z jednej rýchlosti otáčania na druhú, pretože efektívnosť a výkonový faktor motora zostávajú takmer nezmenené na všetkých úrovniach spínania vinutia statora. Nevýhody zahŕňajú väčšiu v porovnaní s bežnou HELL zložitosťou, nadmerné rozmery, väčšie náklady. Navyše potreba prepínania vinutia statora na iný počet dvojíc pólov vyžaduje zložitosť spínacieho zariadenia, čo tiež vedie k zvýšeniu ceny elektrického pohonu ako celku. V súčasnosti sa táto metóda nahrádza frekvenčnou reguláciou.
Frekvenčné riadenie asynchrónnych otáčok motora
Frekvenčná metóda regulácie rýchlosti krvného tlaku je prevládajúca a základná. Aký je dôvod? Po prvé, v súčasnosti bola vyvinutá teória AC strojov, ktorá umožnila nájsť zákony kontroly BP, ktoré sú z niektorých pozícií optimálne. Rozvoj priemyselnej elektroniky umožnil plne implementovať tieto zákony v "železe".
K dispozícii sú skalárne, vektorové riadiace systémy a priame systémy riadenia krútiaceho momentu. Voľba metódy a princípu riadenia je určená kombináciou statických, dynamických a energetických požiadaviek pre asynchrónny elektrický pohon.
Princíp skalárnej regulácie frekvenčne riadeného asynchrónneho elektrického pohonu je založený na zmene frekvenčných a prúdových hodnôt modulov premennej BP (napätie, magnetický tok, točivé spojky a prúdové obvody motora). Tento princíp je najčastejšie vďaka tomu, že sa vyznačuje technickou jednoduchosťou merania a riadenia premenných krvného tlaku, ako aj možnosťou budovania systémov riadenia otvorenej rýchlosti. Hlavnou nevýhodou je obtiažnosť implementácie požadovaných zákonov regulujúcich rýchlosť a moment krvného tlaku v dynamických režimoch.
Princíp ovládania vektorov je spojený so zmenami frekvenčných a prúdových hodnôt premenných arteriálneho tlaku as relatívnou orientáciou ich vektorov v polárnom alebo karteziánskom súradnicovom systéme. Ovládaním polohy uhlov premenných poskytuje táto metóda úplné riadenie arteriálneho tlaku v statickom i dynamickom režime, čo vedie k znateľnému zlepšeniu kvality prechodov v porovnaní s skalárnou kontrolou.
Systémy riadenia priameho momentu sú pokračovaním a vývojom vektorových riadiacich systémov. Úlohou priameho riadenia krútiaceho momentu je zabezpečiť rýchlu odozvu elektromagnetického krútiaceho momentu motora na riadiacu činnosť. Na rozdiel od riadiaceho vektora, kde sa krútiaci moment zmenil pôsobením na statorový prúd, v systéme s priamym riadením krútiaceho momentu je prietokové spojenie statora riadené množstvo.
Frekvenčné meniče konštruované pre HELL s frekvenčným meničom sú rozdelené podľa druhu pripojenia s napájacou sieťou do priameho frekvenčného meniča (NFC) a dvojstupňového frekvenčného meniča (HR frekvenčného meniča) s medzipriestorom priameho alebo striedavého prúdu.
Moment krvného tlaku je úmerný magnetickému toku a aktívnej zložke sekundárneho prúdu:
![]() ,
,
kde - konštruktívny konštantný krvný tlak; - uhol posunu medzi EMF a prúdom rotora;
 .
.
Zo vzorca momentálne možno vidieť, že pokles magnetického toku, ktorý je dôsledkom zvýšenia frekvencie, povedie k zvýšeniu a tým k strate rotora ak súčasnému zníženiu prípustného krútiaceho momentu motora podľa podmienok chladenia motora. Zníženie frekvencie s konštantnou amplitúdou napätia, ako bolo uvedené v bode 4.3.3, je tiež neprípustné za podmienok sýtosti magnetického systému stroja. Preto regulácia otáčok motora zmenou frekvencie napájacieho napätia pod podmienkou, že je krútiaci moment motora konštantný, je prijateľný len vtedy, ak sa zmenila amplitúda napájacieho napätia súčasne, to znamená, že je splnený zákon, čo zaisťuje takmer konštantný magnetický tok v motore.
Na implementáciu špecifikovaného regulačného zákona medzi sieťou a motorom je zapnutý frekvenčný menič (IF), ktorý zabezpečuje súčasné zmeny frekvencie a amplitúdy napätia na motore. Pri nižších rýchlostiach pre samovzdušné motory sa odvod tepla do prostredia znižuje, preto je potrebné v takýchto prípadoch znížiť prípustný krútiaci moment motora.
Ak regulácia frekvencie z dôvodu mechanickej pevnosti ložísk a prvkov rotora zvyšuje frekvenciu vyššie. Preto hlavnou metódou riadenia rýchlosti je zníženie frekvencie napätia.
Aby sme vytvorili približnú formu mechanických vlastností, predpokladáme, že potom možno prepracovať rovnicu kritického momentu nasledovne:
 .
.
Z vzorca je jasné, že kritický moment pri implementácii zákona zostáva konštantný. Podmienka zanedbania aktívneho odporu statora je správna pri vysokých otáčkach motora, kedy. Pri nízkych otáčkach sa pokles napätia naprieč aktívnym odporom statora stáva porovnateľným s napätím na statorových svorkách, čo vedie k poklesu preťažiteľnosti motora. Aby sa dosiahla rovnaká kapacita preťaženia s reguláciou frekvencie v oblasti nízkych rýchlostí, takzvaný " IR kompenzácia», Ktorá spočíva v tom, že pri nízkych otáčkach sa pridáva napätie na stator kompenzujúce.
Rozsah regulácie otáčok v otvorených systémoch je. V uzavretých systémoch môže byť rozsah výrazne rozšírený.
Hlavné problémy, s ktorými sa stretávame pri implementácii frekvenčnej kontroly, sú:
1) na získanie vlastností podobných (alebo dokonca vyšších) vlastností TP-DPT systémov v IF systémoch je potrebné získať informácie o rôznych parametroch AD;
2) systémy sú veľmi nelineárne a na získanie vysokokvalitných systémov je potrebné zaviesť väzby, ktoré kompenzujú nelinearitu riadeného objektu;
3) zákon nie je optimálny a vyžaduje sa úprava zákona s ohľadom na hriadeľ motora;
4) Parametre BP obsahujú hodnotu, ktorá závisí od stupňa saturácie stroja nelineárne. Okrem toho sa hodnoty aktívnych odporov statora a rotora menia so zmenou teploty vinutia motora, ktorá musí byť tiež zohľadnená.
Napriek týmto problémom fungujú moderné frekvenčné meniče úspešne a poskytujú vysokokvalitný proces riadenia rýchlosti.
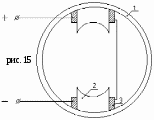
Princíp DPT.Stroj by mal mať dve hlavné časti: prvá časť - vytvorí magnetický tok, druhá časť - v ktorej sa vyvolá EMF. Prvá časť stroja DC je pevná. Na rám (1), na ktorom je umiestnené vinutie poľa (3), sú pripevnené stĺpové stožiare (2). Druhou časťou je kotva. Kotva sa otáča. Jedná sa o valec vyrobený z elektrických plechov (4), vo vonkajšej časti kotvy sa nachádzajú štrbiny, v ktorých sú uložené vinutia (5). Každá sekcia je pripojená k kolektorovým doskám (6). 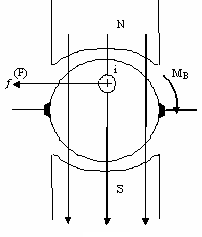
Elektromagnetický moment závisí od toku a prúdu kotvy. V režime generátora je brzdný elektromagnetický moment. Rovnica rovnovážneho stavu momentov je zaznamenaná, kde je mechanický moment na hriadeli generátora, moment xx, je elektromagnetický moment. Základná rovnica pohybu elektrického pohonu. Zriadený proces keď ",,, ak". Ak ". 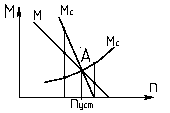
 Princíp regulácie rýchlosti. Z hľadiska regulácie otáčok je jednosmerný motor univerzálny. Rýchlosť môžete nastaviť zmenou odporu v okruhu kotvy, prietoku a privádzaného napätia. To je zrejmé z vzorca :.
Princíp regulácie rýchlosti. Z hľadiska regulácie otáčok je jednosmerný motor univerzálny. Rýchlosť môžete nastaviť zmenou odporu v okruhu kotvy, prietoku a privádzaného napätia. To je zrejmé z vzorca :.
Odolnosť v reťazci kotvy.Rovnice prúdov pred a po zavedení odporu
Odtiaľ, t.j. prúdy, klesá moment (). Zároveň sa rýchlosť znižuje. S poklesom rýchlosti kotvy sa zvyšuje a dosiahne pôvodný prúd armatúry, ale pri nižšej rýchlosti. Regulácia frekvencie otáčania odporu v okruhu kotvy je v smere zníženia rýchlosti. 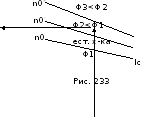
Flow. Kotevný prúd pred a po prietoku mení ich postoj. rovnice 5.1. momenty. Znížte tok, zvyšuje sa prúd armatúry a potom toi (zvyšuje sa).
Napätie.Riadenie rýchlosti sa uskutočňuje nasledujúcimi spôsobmi: A) Systém generátor-motor (GD). B) Tyristorový konvertor-motor (TP-D). B) Regulácia šírky impulzu.
 A) Systém GD, ris.234. , Zvýšením budiaceho prúdu generátora vg sa zvýši tok Φ g a E g a preto sa zvyšuje napätie na kotve motora a zvyšuje sa rýchlosť.
A) Systém GD, ris.234. , Zvýšením budiaceho prúdu generátora vg sa zvýši tok Φ g a E g a preto sa zvyšuje napätie na kotve motora a zvyšuje sa rýchlosť.
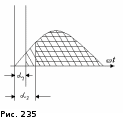
B) Prevodník-motor tyristora. Zvýšením riadiaceho uhla - polovice periódy klesá, priemerná hodnota napätia -U cf klesá, a preto sa rýchlosť otáčania znižuje.
B) Regulácia šírky impulzu.
Zmenou času impulzu t a zmeny pracovného cyklu, kde t je čas impulzu; t p - čas pauzy. Priemerná hodnota U cf = U 0. , 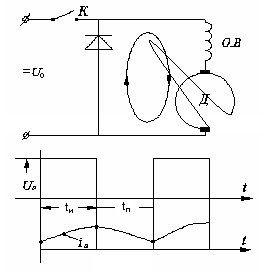
Spôsoby riadenia aktívneho a jalového výkonu synchrónneho generátora. Ako sme práve videli, ak zmeníme budenie generátora, tak zmeníme reakčnú silu, odovzdáme ju alebo ju spotrebujeme. Aktívny výkon je možné regulovať iba zmenou mechanickej energie zo strany parnej turbíny alebo hydroturbíny. S nárastom aktívneho výkonu je potrebné zvýšiť mechanickú energiu z turbíny.
Spustite SD. aby sa spustil synchrónny motor, je potrebné urýchliť jeho rotor pomocou externého krútiaceho momentu na rýchlosť otáčania blízko synchrónneho motora. Z dôvodu nedostatočného štartovacieho momentu v synchrónnom motore sa na jeho spustenie používajú tieto metódy: 1 Začnite používať pomocný motor; 2Synchrónny štart motora.
1. Uvedenie synchrónneho motora do prevádzky pomocou pomocného motora sa môže vykonávať len bez mechanického zaťaženia na jeho hriadeli, t. J. takmer nečinné. V takomto prípade je motor počas obdobia uvedenia do prevádzky dočasne premenený na synchrónny generátor, ktorého rotor sa otáča malým pomocným motorom až do n = 0,95n 1. Stator tohto generátora je paralelne prepojený so sieťou v súlade s podmienkami tohto pripojenia. Po zapnutí statora do siete, pri krátkej rýchlosti uzávierky je navíjanie v poli zapnuté a motor je nasmerovaný do synchronizácie a motor pomocného pohonu je mechanicky vypnutý. Tento spôsob štartovania je komplikovaný a má aj pomocný motor.
2. Synchrónny motor v čase štartovania sa stáva asynchrónnym. Pre možnosť vytvárania asynchrónneho rozbehového momentu v drážkach pólových častí motora mimo pólu sa umiestni spúšťací skratovaný vinutie. Proces spúšťania synchrónneho motora sa uskutočňuje v dvoch etapách. Keď je statorové vinutie (1) zapnuté, v motore sa vytvorí rotačné pole, ktoré indukuje emf v skratovanom vinutí rotora. Pod akciou, ktorá prúdi v prúde prúdu. Výsledkom interakcie rotujúceho magnetického poľa s prúdom v skratovanom vinutí je generovanie krútiaceho momentu, ako u asynchrónneho motora. V dôsledku tohto momentu rotor zrýchľuje na kĺzanie blízko k nule (S = 0,05), obr. 313. Toto ukončí prvú etapu. Na to, aby sa mohol rotor motora synchronizovať, je potrebné vytvoriť magnetické pole v ňom tým, že sa do budiaceho vinutia (3) zapojením jednosmerného prúdu (prepnutím kľúča K do polohy 1) vloží. Pretože je rotor zrýchlený na rýchlosť blízko synchrónnej polohy, relatívna rýchlosť statora a rotora je malá. Póly sa hladko objavia. A po sérii sklzu sa budú priťahovať opačné póly a rotor sa nasníma do synchronizácie. Potom sa rotor otáča synchronizovanou rýchlosťou a jeho otáčky budú konštantné, obr. 313. Tým sa končí druhá etapa spustenia. Práca SD v pomerne vzrušených a nadmerne vzrušených režimoch (ib=
var).
Režim prevádzky zodpovedá stálosti momentu. at. Pri podvyhnutom synchrónnom motore zodpovedá napäťová zložka -E 0 prúdu I, ktorý zaostáva za napätím Uc uhlom φ. Reaktívna zložka prúdu IL bude zaostávať o 90 ° od napäťového vektora Uc, t.j. tento prúd je čisto induktívny. To znamená, že keď nie je vzrušený, motor spotrebuje indukčný prúd zo siete a preto spotrebuje reaktívny výkon zo siete. 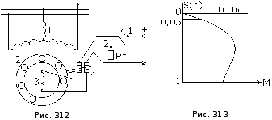
S rastúcim budením sa hodnota -E 0 1 zvyšuje a prúd I klesá na Ia = I 1 a bude minimálny. V tomto režime bude pamäť SD pracovať s cosφ = 1 a jalový výkon sa nebude spotrebovávať ani nepodávať sieti. Pri ďalšom zvyšovaní budiaceho prúdu bude zložka napätia -E 0 11 a prúd I11 bude pred vektorom napätia siete uhlom φ1. Tento režim zodpovedá režimu s preexponovaným režimom. Reaktívna zložka prúdu bude kapacitná (pred vektorom Uc 90 0). Tento režim bude zodpovedať návratu jalového výkonu do siete. Tento režim je podobný začleneniu statických zásobníkov do siete. 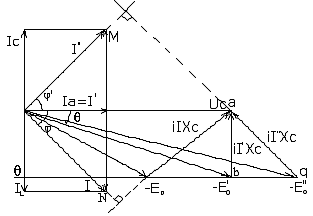
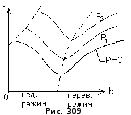
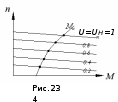
Takže vidíme, že ak sa zmení budiaci prúd iB, hodnota statorového prúdu I sa bude meniť vo veľkosti a vo fáze, t.j. Môžete upraviť cosφ. Táto hodnotná vlastnosť určuje použitie synchrónnych motorov. Závislosti statorového prúdu I na budiacom prúde ib, I = f (ib) sa nazývajú charakteristiky tvaru U, obr. 309. P 2\u003e P 1. Charakteristiky sú odstránené pri P = const. Režim činnosti zodpovedajúci budiacemu prúdu od 0 po bodkovanú čiaru nie je excitovaný a za tečkovanou čiarou sa nadmerne prerušuje uvoľňovanie reaktívnej energie do siete.
V mnohých prípadoch sa trojfázové asynchrónne motory používajú pre pohony, ktoré nevyžadujú kontrolu rýchlosti. Avšak asynchrónne motory majú cenné výhody: spoľahlivosť, nízke náklady, jednoduchosť dizajnu, vysoká účinnosť a relatívne nízka hmotnosť. Z týchto dôvodov je prirodzené ich aplikovať na pohony s meniteľnou rýchlosťou.
Pre reguláciu otáčok asynchrónnych motorov s rotorom s krátkym klietkou sa zvyčajne používa spôsob riadenia frekvencie, ktorá je plynulá regulácia rýchlosti otáčania magnetického poľa tým, že riadi frekvenciu prúdu v statorového vinutia, a spôsob zmenou počtu otočného magnetického poľa pólových párov, pričom frekvencia otáčania magnetického poľa sa mení skokom.
Na reguláciu rýchlosti otáčania asynchrónnych motorov s fázovým rotorom sa používa metóda reostatu, ktorá je plynulým riadením sklzu rotora zmenou aktívneho odporu jeho fázových vinutí.
Frekvenčná regulácia. Najsľubnejší spôsob regulácie otáčok indukčného motora je regulácia frekvencie stator acengine. Uhlová rýchlosť rotujúceho poľa je n = 2 f / p. Preto keď sa zmení aktuálna frekvencia f, úhlová rýchlosť poľa sa mení úmerne. Avšak pri regulácii frekvencie prúdu je potrebné brať do úvahy potrebu súbežnej regulácie napätia. Je to spôsobené tým, že v súlade s výrazom (14.10) je EMF fázy a teda napájacieho napätia úmerné frekvencii prúdu a toku. Vzhľadom na to, že prietok musí byť rovnaký vo všetkých režimoch, musí byť napätie (bez zohľadnenia poklesov napätia v zariadení) úmerné frekvencii. Okrem toho je potrebné, aby sa pri zmene otáčok motora jeho krútiaci moment nezmenil.
Na posúdenie charakteru závislosti krútiaceho momentu na frekvencii prúdu v statorových vinutiach a na napätí cez ne, ignorujeme aktívny odpor statorového vinutia v rovnici (14.28) g la indukčnú odolnosť statorových vinutí x pac 1 a rotora x rac2 a použiť výraz pre sklzovú frekvenciu (14.13):
MVR= = A,
kde = const.
Preto pri zmene frekvencie prúdu, aby sa udržal konštantný krútiaci moment, je potrebné proporcionálne meniť napätie na stator; inými slovami, podmienka na udržanie konštanty krútiaceho momentu motora pri nastavovaní frekvencie bude U 1 / f= const. Ak nastavíte frekvenciu prúdu a napätia pri dodržaní špecifikovaných podmienok, mechanické charakteristiky motora zostanú tuhé a maximálny krútiaci moment je takmer nezávislý od frekvencie (výrazne klesá len pri pomerne nízkych frekvenciách). Súčasne sa výkon bude líšiť v pomere k frekvencii prúdu, pretože P2 =M p r. Napríklad, ak je frekvencia prúdu znížená dvakrát, výkon motora na hriadeli sa tiež znižuje na polovicu.
Nariadením zmenou počtu dvojíc pólov. Postupné variácie uhlovej rýchlosti asynchrónneho motora v širokých medziach uskutočniteľnú nákladov a zložitosti indukčného motora drahšie konštrukcie - táto regulácia spínanie motora pólových dvojíc.
Pri konštantnej frekvencii siete závisí uhlová rýchlosť rotujúceho poľa len počet párov pólov tohto poľa určených statorovým vinutím. Ak sú na stator umiestnené dve samostatné vinutia - jeden je tvarovaný rparou a druhou tvorbou p "dvojice pólov, potom zapojením prvého alebo druhého vinutia získame frekvenciu otáčania poľa:
N1 = 60 f / p alebo n "1 = 60f / p",preto,
n1 / n "1 = p" / p,
preto sa tiež budú meniť otáčky rotora motora. V tomto prípade by malo byť navíjanie rotora motora vykonávané ako veverička.
Počet pólov vinutia statora je v tomto prípade navzájom nesúvislý a môže byť zvolený ľubovoľným spôsobom v závislosti od prevádzkových podmienok motora. Samotné nariadenie zmiernilo náhlu zmenu frekvencie otáčania motorového poľa. Frekvencia otáčania rotora sa však nemôže náhle meniť kvôli zotrvačnosti celého systému elektrického pohonu. Iba po zapnutí začne zodpovedajúca zmena otáčok rotora.
Aby sme tento proces prechodu jasnejšie ukázali, vytvoríme dve mechanické vlastnosti asynchrónneho stroja s premenlivým počtom párov pólov: jedna charakteristika, ktorá zodpovedá rdvojice pólov a druhá p "= 1pdvojice pólov (obrázok 14.31, aa b).Predpokladajme, že krútiaci moment na hriadeli motora zostane konštantný pri zmene rýchlosti poľa. S nárastom posledne menovaného, t.j. počas prechodu z p "na rdvojice pólov, motor sa najskôr ukáže byť v blízkosti podmienok štartovacích a tam je skok v prúde.
Ale odtiaľto rna p ", to znamená, že keď sa frekvencia otáčania poľa znižuje, stroj sa najskôr objaví v podmienkach generátorového režimu a pracuje a dodáva energiu do siete.
Tento režim sa niekedy používa na rýchle a ekonomické brzdenie pohonu.
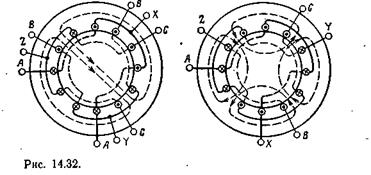
Statory sú dodávané s dvoma samostatnými vinutiami len pre motory s malou silou; pre motory s vysokým výkonom je výhodnejšie prepínať cievky rovnakého vinutia, aby sa získal rozdielny počet dvojic pólov. Na obr. 14.32 je znázornená schéma prepínania trojfázového navíjania z dvoch na štyri póly. Prepínanie vinutia iným spôsobom ako 1: 2 vyžaduje zložitú zmenu obvodu a používa sa menej často.
Vo väčšine prípadov sa stator asynchrónneho stroja dodáva s dvoma nezávislými vinutiami, z ktorých každý sa prepína v pomere 1: 2 alebo druhý. Motor má teda štyri stupne rýchlosti otáčania, napríklad 3000,\u003e 1500, 1000 a 500 ot / min.
Regulácia reostatov, V trojfázových asynchrónnych motoroch s fázovým rotorom sa používa rheostatová metóda regulácie otáčok rotora. Toho sa dosiahne zavedením do fázového vinutí rotora nastaviteľného trojfázového reostatu, ako pri štarte motora (obrázok 14.24). Ale tento reostat by mal byť konštruovaný pre nepretržité zaťaženie rotorového prúdu, a nie pre krátkodobý, ako východiskový reostat. Zvýšenie aktívneho odporu obvodu rotora mení charakteristiku M(s) - je mäkšia (pozri obrázok 14.25). Ak pri konštantnom krútiacom momente na hriadeli motora zvýšte aktívny odpor okruhu rotora postupným zvyšovaním odporu reostatu (rp1< r p2< r р3), то рабочая точка будет смещаться с одной кривой M (s)na ďalší, čo zodpovedá zvýšenému odporu obvodu rotora (obrázok 14.25, body 1-4), v dôsledku toho sa zvýši sklz a následne sa znížia otáčky motora.
Týmto spôsobom je možné meniť otáčky rotora z nominálnej na úplnú. Ale s touto metódou regulácie sú relatívne veľké energetické straty nevyhnutné (pozri § 14.11). Výkon rotujúceho poľa R BP, ss výnimkou energetických strát v jadre statora (viď obrázok 14.20) strát energie v vodičoch navíjania rotora (pozri ekvivalentný obvod na obrázku 14.19);
P pr2 = r "B2 (I" 2) 2
a mechanickú energiu
P fur = r "B2 (I" 2) 2.
postoj
P pr 2 / P fur = s / (l-s) = (n1 - p) / p
ukazuje, že rozdelenie mechanickej sily je redukované v priamom pomere k poklesu rýchlosti rotora, súčasne sa zvyšuje podiel straty energie v aktívnom odporu obvodu rotora. Preto, aby sa znížilo otáčky motora, napríklad o 25%, reostat s aktívnym odporom, v ktorom bude zbytočné premeniť na teplo, musí byť štvrtina energie rotujúceho magnetického poľa zahrnutá do obvodu rotora. Nevýhodou takejto regulácie môže byť skutočnosť, že zahrnutie reostatu do rotorového obvodu robí mechanickú charakteristiku motora mäkšou, a preto znižuje stabilitu jeho otáčavých otáčok. Keď je reostat zapnutý, malé zmeny v zaťažení hriadeľa spôsobujú výrazné zmeny otáčok motora.
![]()
Regulácia otáčok motora sa určuje v súlade s požiadavkami technologických postupov a výrobných mechanizmov, v ktorých sa používajú. Vyznačuje sa týmito kľúčovými ukazovateľmi.
Rozsah regulácie D (limit zmeny otáčok). Táto hodnota sa vzťahuje na pomer maximálnych otáčok motora k jeho minimálnej rýchlosti.
Hladká regulácia, ktorý sa vyznačuje minimálnym skokom pri otáčaní z jednej mechanickej charakteristiky na druhú.
Smer možnej zmeny otáčok motora (kontrolná zóna).
Pri menovitých prevádzkových podmienkach (napätie a frekvencia sieťového napájania) má motor prirodzenú mechanickú charakteristiku. Pri nastavovaní rýchlosti zodpovedajúcich charakteristík sa bude líšiť od prirodzeného. Tieto vlastnosti sa nazývajú umelé (nastavovacie) charakteristiky. Pomocou niektorých metód regulácie je možné získať umelé vlastnosti, ktoré sú umiestnené len pod prirodzenou. Iné metódy poskytujú kontrolu rýchlosti nad a pod prírodnými vlastnosťami. Účinnosť regulácie je určená dodatočnými investičnými nákladmi potrebnými na vytvorenie nastavovacích zariadení, ako aj stratu elektrickej energie počas regulácie.
Je potrebné poznamenať, že v niektorých prípadoch sú tieto mechanizmy pôsobia na relatívne krátkych syntetických charakteristík, výkonové straty aj pri spôsoboch regulácie nehospodárne by malé (práca pri nízkych rýchlostiach ladení výťahy, žeriavy a ďalšie.). Súčasne je racionálnejšie používať jednoduché a lacné spôsoby riadenia rýchlosti motora, aj keď je z hľadiska spotreby energie neekonomické.
Prípustné zaťaženie motora počas jeho činnosti na nastavovacích charakteristikách je obmedzené veľkosťou prúdov v obvode statora a rotora. Toto zaťaženie je určené prípustným ohrievaním motora a je do značnej miery určené mechanickými vlastnosťami výrobných mechanizmov, momentom odporu na hriadeli, momentom zotrvačnosti motora a mechanizmu atď.
Riadenie rýchlosti otáčania asynchrónnych motorov sa môže uskutočňovať prostredníctvom jeho vplyvu zo strany statora alebo zo strany rotora. Všetky tri metódy sa v praxi široko používajú. Zvážte tieto metódy podrobnejšie.
Riadenie rýchlosti menením frekvencie napájania je najhospodárnejšia metóda regulácie a umožňuje získať dobré mechanické vlastnosti pohonu. Pri zmene frekvencie sieťového napájania sa mení frekvencia otáčania magnetického poľa indukčného motora. Napájací zdroj motora musí konvertovať napätie štandardnej sieťovej frekvencie 50 Hz na napätie s požadovanou frekvenciou. Súčasne so zmenou frekvencie by malo byť napätie aplikované na motor regulované podľa určitého zákona, aby sa zabezpečila vysoká tuhosť mechanickej charakteristiky a požadovaná preťažiteľnosť motora. Pri nastavovaní rýchlosti otáčania asynchrónnych motorov menením frekvencie sieťového napájania je možné zabezpečiť rôzne režimy prevádzky: s konštantným krútiacim momentom; s konštantným výkonom hriadeľa; s časom úmerným štvorcu frekvencie.
Závislosti medzi regulovaným napätím a frekvenciou s vplyvom odporu statora sa mení mechanické vlastnosti tuhosti, nasýtenia ocele a zhoršuje prenos tepla pri nízkych otáčkach rotora sú pomerne zložité. Ako zdroj energie je možné používať rotačné meniče používajúce elektrické stroje alebo statické frekvenčné meniče na polovodičových zariadeniach, ktoré sú komerčne vyrábané priemyslom. Pozitívnym znakom regulácie frekvencie je možnosť plynulej regulácie v širokom rozsahu na obidve strany prirodzených charakteristík (vrátane možného otáčania motora s frekvenciou vyššou ako je nominálna). Pri regulácii je zabezpečená tuhosť charakteristík a vysoká schopnosť prekládky. Avšak v niektorých prípadoch sú v pohonech kovoobrábacích strojov, elektrických vretien, vysokovýkonných dúchadiel a iných mechanizmov najprijateľnejšia regulácia frekvencie.
Regulácia rýchlosti zmenou počtu pólov v statorovom vinutie je zabezpečené zmenou frekvencie otáčania magnetického poľa statora. S konštantnou frekvenciou sieťového napájania sa frekvencia otáčania magnetického poľa a frekvencia otáčania rotora, ktorú určuje, menia inverzne s počtom pólov. Vzhľadom k tomu, počtu pólov, pevné kroky, môže to byť 2, 4, 6, 8, 10 a tak ďalej. E., že sieťový kmitočet 50 Hz zodpovedá synchrónne rýchlosti otáčania 3000, 1500, 1000, 750, 600 na / min atď., potom sa dá dosiahnuť len postupná regulácia.
Okrem dvojrýchlostných asynchrónnych motorov boli použité aj trojrýchlostné a štvorrýchlostné motory. V trojrýchlostných motoroch je jedno spínateľné a jedno neprepínateľné vinutie a vo štvorrých motoroch sú dve spínateľné vinutia, ktoré umožňujú získať štyri synchronné rýchlosti otáčania, napríklad 3000/1500/1000/500 ot / min. Motory s prepínacím počtom párov stĺpikov majú spravidla skratovaný rotor s vinutie typu klietky vo veveričke. Takýto rotor poskytuje schopnosť pracovať bez dodatočných znovuzískaní reťazca. V prípade fázového rotora vo viacotáčkových motoroch by bolo potrebné vykonať súčasne prepínanie na stator a rotor, čo by komplikovalo konštrukciu rotora a prevádzku takýchto strojov. Pozitívne ukazovatele viacotáčkových asynchrónnych motorov zahŕňajú účinnosť a pomerne veľký rozsah riadenia rýchlosti rotora. Nevýhodou tejto metódy regulácie je vyššie uvedená nemožnosť hladkej zmeny rýchlosti otáčania.
Ako bolo uvedené, v rámci jednej spoločnej priemyselnej série asynchrónnych motorov 4A sa vyrába modifikácia viacotáčkových motorov navrhnutých na prevádzku pri dvoch, troch alebo štyroch rýchlostiach. Riadenie frekvencie zmenou sklzu je jednou z najjednoduchších metód kontroly. Súčasne, keď sa zväčšuje (zväčšuje) sklz, straty v zmene (zväčšovaní) vinutia rotora, čo vedie k zníženiu účinnosti počas regulácie.
Ovládanie sklzu môže byť uskutočnená tak zo strany statora, ako aj zo strany rotora. Samozrejme, v druhom prípade musí byť rotor fázový a má navíjanie priviezané na klzné krúžky. Pri nastavovaní zo strany statora sa mení napätie na jeho navíjanie. Zvýšenie napätia nad menovité napätie vedie k nasýteniu magnetického obvodu motora, a preto sa neuplatňuje.
Ak chcete regulovať otáčky, znížte napájacie napätie. V tomto prípade sa krútiaci moment vyvinutý motorom mení v pomere k štvorcu napätia a následne k mechanickým charakteristikám zmeny motora, v dôsledku čoho sa menia aj hodnoty pracovného sklzu. Pri regulácii zo strany rotora sa rheostatická regulácia rýchlosti otáčania uplatňuje hlavne zavedením dodatočných aktívnych odporov (odporov) do okruhu navíjania rotora. Je dôležité poznamenať, že zmena v širokom rozsahu otáčok motora touto metódou regulácie nebude mať za následok zmeny maximálneho (kritického) krútiaceho momentu. Preto nie je znížená preťažiteľnosť motora počas regulácie.

"Takmer každý deň naši vedci, skúmajúc útvary zeme, nájdu v ňom všetky nové obrovské zásoby uhlia, ...

Strana 2 z 3 3. PREVÁDZKOVÉ PRÁCE NA HV. 3.1.Ak chcete zistiť chyby, ktoré sa vyskytujú na nadzemnom vedení a ich včasné ...

Prípravný moment: dvaja študenti pripravujú správy o materiáli §3.4 (Ako prešli informácie v minulosti) a §3.5 ...

Aké by mohli byť bežné elektrické vedenia? Výkonové veže sú jednou z najbežnejších inžinierskych štruktúr a ...

Sop - Sop, n. 1. Čokoľvek ponorené alebo ponorené a zmäkčené do akejkoľvek tekutiny; hlavne niečo ponorené do vývaru ... ... ...
Viacfázový prijímač a všeobecne viacfázový obvod sa nazývajú symetrické, ak majú zložité odpory ...

15.12.2015 Platba za elektrickú energiu v spoločnosti Sberbank je najjednoduchší spôsob využívania on-line bankovníctva. Pre začiatočníkov ...

Medzi mnohými funkciami poskytovanými programom Microsoft Excel je funkcia grafov obzvlášť užitočná ....

Pošlite svoju dobrú prácu do vedomostnej základne je jednoduché. Použite formulár nižšie Študenti, ...

LED fytocentra - najlepšia možnosť zvýraznenia klíčivých rastlín. Tu nájdete tipy na ...
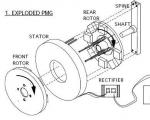
Odoslané: Časť 1. Podrobne zváženie výroby klasického nízkorýchlostného generátora na trvalé ...

Štvrtý deň festivalu Freshmen z IzhSTU pomenovaný po M. T. Kalashnikovovi otriasol celú univerzitu. 14. september ...

V elektrických inštaláciách sa nachádzajú polohy, keď nie je možné bez elektrického motora bežiaceho na jednosmerný prúd ...

Dnes je ťažké si predstaviť veľké obchodné, vzdelávacie, kancelárske a skladové priestory bez luminiscenčného ...

Pri prevádzke štandardného spínača môžete dosiahnuť maximálny jas žiaroviek. Ale existujú ...

Prúdové transformátory sa používajú na meranie prúdov v obvodoch napájania striedavého prúdu. Používajú sa ako v ...