किसी व्यक्ति पर कीमोथेरेपी दवाएं कैसे काम करती हैं - गुण और दुष्प्रभाव विभिन्न समूहों की कीमोथेरेपी दवाएं
कुछ समूहों में कीमोथेरेपी दवाओं का विभाजन बल्कि मनमाना है। यह विभाजन विभिन्न पर आधारित है ...
संघीय शिक्षा एजेंसी
"माटी" - रूसी राज्य
तकनीकी विश्वविद्यालय
उन्हें। के.ई. त्सिओलकोवस्की
विभाग "इलेक्ट्रॉनिक्स और सूचना विज्ञान"
तीन-चरण अतुल्यकालिक मोटर्स
के लिए विधायी निर्देश प्रयोगशाला कार्यकी दर पर:
"इलेक्ट्रॉनिक्स और इलेक्ट्रिकल इंजीनियरिंग"
ए.एल. मार्चेंको . द्वारा संकलित
मास्को 2005
कार्य का लक्ष्य
तीन-चरण अतुल्यकालिक मोटर (एएम) की यांत्रिक और प्रदर्शन विशेषताओं को हटाने और बनाने के लिए; रक्तचाप के मॉडल का अध्ययन करें और क्षणिक मोड में उनके काम की जांच करें।
सैद्धांतिक प्रावधान और गणना सूत्र
1. नरक की संरचना और संचालन सिद्धांत
उद्योग में तीन-चरण अतुल्यकालिक मोटर्स का सबसे व्यापक रूप से उपयोग किया जाता है (चित्र 19.1)। यह इस तथ्य के कारण है कि वे डिजाइन में सरल, सस्ते, संचालन में विश्वसनीय हैं, रेटेड लोड पर उच्च दक्षता रखते हैं, महत्वपूर्ण अधिभार का सामना करते हैं, और जटिल शुरुआती उपकरणों की आवश्यकता नहीं होती है।
एन  रक्तचाप के लाभों के साथ-साथ, उनके कई नुकसान भी हैं, जिनमें से मुख्य हैं: निम्न शक्ति कारक (क्योंकि
) आंशिक भार पर (बिना भार के)
0
= 0.2 ... 0.3); कम भार पर कम दक्षता; असंतोषजनक विनियमन विशेषताएं।
रक्तचाप के लाभों के साथ-साथ, उनके कई नुकसान भी हैं, जिनमें से मुख्य हैं: निम्न शक्ति कारक (क्योंकि
) आंशिक भार पर (बिना भार के)
0
= 0.2 ... 0.3); कम भार पर कम दक्षता; असंतोषजनक विनियमन विशेषताएं।
हे 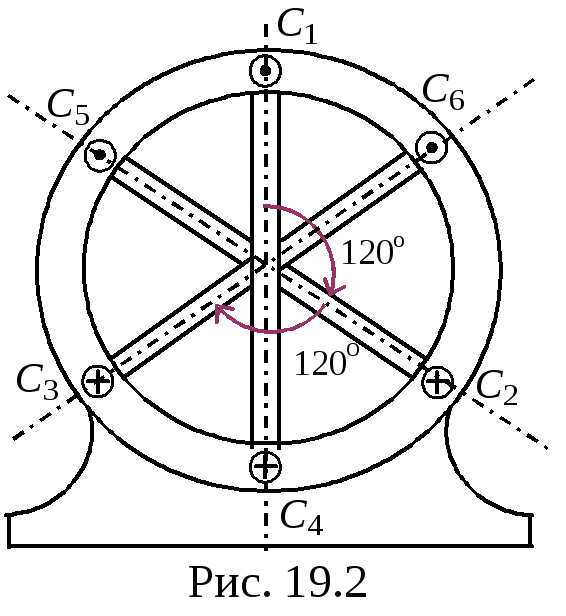 IM के मुख्य भाग स्टेटर और रोटर हैं, जो एक दूसरे से हवा के अंतर (0.3 ... 0.5 मिमी) से अलग होते हैं। उनके कोर विद्युत स्टील शीट से इकट्ठे होते हैं। स्टेटर की सतह के अंदरूनी हिस्से पर और बाहरी रोटर पर, खांचे पर मुहर लगाई जाती है, जिसमें वाइंडिंग रखी जाती है। स्टेटर कोर को एक आवास में रखा जाता है, जिस पर स्टेटर वाइंडिंग के टर्मिनलों को तय किया जाता है, जिसमें 120 (चित्र। 19.2) द्वारा अंतरिक्ष में स्थानांतरित तीन स्वतंत्र वाइंडिंग होते हैं। रोटर कोर सीधे मोटर शाफ्ट पर या शाफ्ट पर फिसले हुए हब पर लगाया जाता है।
IM के मुख्य भाग स्टेटर और रोटर हैं, जो एक दूसरे से हवा के अंतर (0.3 ... 0.5 मिमी) से अलग होते हैं। उनके कोर विद्युत स्टील शीट से इकट्ठे होते हैं। स्टेटर की सतह के अंदरूनी हिस्से पर और बाहरी रोटर पर, खांचे पर मुहर लगाई जाती है, जिसमें वाइंडिंग रखी जाती है। स्टेटर कोर को एक आवास में रखा जाता है, जिस पर स्टेटर वाइंडिंग के टर्मिनलों को तय किया जाता है, जिसमें 120 (चित्र। 19.2) द्वारा अंतरिक्ष में स्थानांतरित तीन स्वतंत्र वाइंडिंग होते हैं। रोटर कोर सीधे मोटर शाफ्ट पर या शाफ्ट पर फिसले हुए हब पर लगाया जाता है।
रोटर वाइंडिंग शॉर्ट-सर्किट या स्टेटर वाइंडिंग के समान तीन-चरण हो सकती है। रोटर की शॉर्ट-सर्किट वाइंडिंग को "गिलहरी के पहिये" के रूप में बनाया गया है, जिसमें छड़ें होती हैं और उन्हें छल्ले के सिरों पर बंद कर दिया जाता है (चित्र 19.3, एतथा बी) के साथ नरक में चरण रोटर(अंजीर देखें।19.1, वी) कुछ छोर ओ 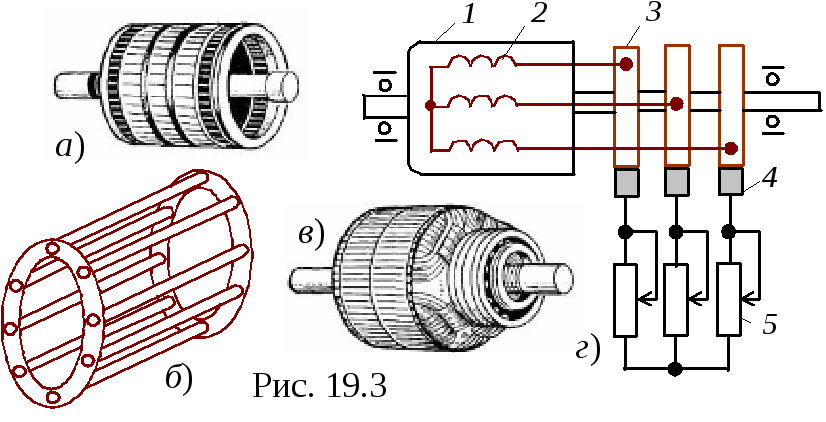 रील 2
रोटार 1
पर्ची के छल्ले के साथ कनेक्ट करें 3
मोटर शाफ्ट पर स्थित होते हैं, जबकि अन्य एक तारे से जुड़े होते हैं (चित्र.19.3, वीतथा जी) पर्ची के छल्ले 3
ब्रश का उपयोग करके मशीन के स्थिर भाग के संपर्कों से जुड़ा 4
और ब्रश धारक। एक प्रारंभिक रिओस्तात 5 उनसे जुड़ा है।
रील 2
रोटार 1
पर्ची के छल्ले के साथ कनेक्ट करें 3
मोटर शाफ्ट पर स्थित होते हैं, जबकि अन्य एक तारे से जुड़े होते हैं (चित्र.19.3, वीतथा जी) पर्ची के छल्ले 3
ब्रश का उपयोग करके मशीन के स्थिर भाग के संपर्कों से जुड़ा 4
और ब्रश धारक। एक प्रारंभिक रिओस्तात 5 उनसे जुड़ा है।
रक्तचाप के संचालन का सिद्धांत घूर्णन की बातचीत पर आधारित है चुंबकीय क्षेत्ररोटर (चलती भाग) में प्रेरित धाराओं के साथ स्टेटर (मशीन का स्थिर हिस्सा)।
मशीन का चुंबकीय क्षेत्र बनाने के सिद्धांत पर विचार करें। तीन-चरण स्टेटर वाइंडिंग द्वारा संचालित है तीन चरण प्रणालीवोल्टेज (अंजीर देखें। 19.1, ए) साथ चरण वोल्टेज यू 1 एफ... चूंकि तीन चरण वाइंडिंग (अंतरिक्ष में एक दूसरे के सापेक्ष 120 (चित्र। 19.2) में स्थानांतरित हो जाते हैं और घुमावों की संख्या होती है वू 1) बंद हैं, फिर उनमें धाराएँ प्रवाहित होती हैं मैं 1, परिणामस्वरूप, तीन एमडीएस बनाए जाते हैं एफ 1 = मैं 1 वू 1. इन तीन एमडीएस की क्रिया के तहत, एक घूर्णन चुंबकीय क्षेत्र बनता है, जिसके परिणामस्वरूप चुंबकीय प्रवाह वेक्टर होता है एफ आर = 3/2एफ एम, कहां एफ एम - चरण एमडीएस द्वारा निर्मित चुंबकीय प्रवाह एफ 1 .
विद्युत चुम्बकीय प्रेरण के नियम के अनुसार, EMF स्टेटर और रोटर वाइंडिंग में प्रेरित होता है इ 1 और इ 2. रोटर वाइंडिंग सर्किट हमेशा बंद रहता है, इसलिए रोटर के फेज वाइंडिंग में धाराएँ प्रवाहित होती हैं मैं 2, जिसका मान भार पर निर्भर करता है। एम्पीयर के नियम के अनुसार, स्टेटर के घूर्णन चुंबकीय क्षेत्र के साथ रोटर धाराओं के परस्पर क्रिया से, मोटर शाफ्ट पर एक बलाघूर्ण उत्पन्न होता है। एम, और यदि यह प्रतिरोध के क्षण से अधिक है एम साथशाफ्ट पर रोटर घूमने लगता है। लेनज़ के नियम के अनुसार, रोटर धाराएँ, जैसे वे घूर्णन चुंबकीय क्षेत्र बनाते हैं, स्टेटर वाइंडिंग की धाराओं और चुंबकीय प्रवाह को प्रभावित करते हैं एफ आरमशीन की, जिससे रोटर वाइंडिंग में धाराओं के विचुंबकीय प्रभाव की भरपाई करने के लिए स्टेटर करंट में वृद्धि होती है।
स्टेटर (आरपीएम में) के घूर्णन चुंबकीय क्षेत्र की आवृत्ति अभिव्यक्ति द्वारा निर्धारित की जाती है: 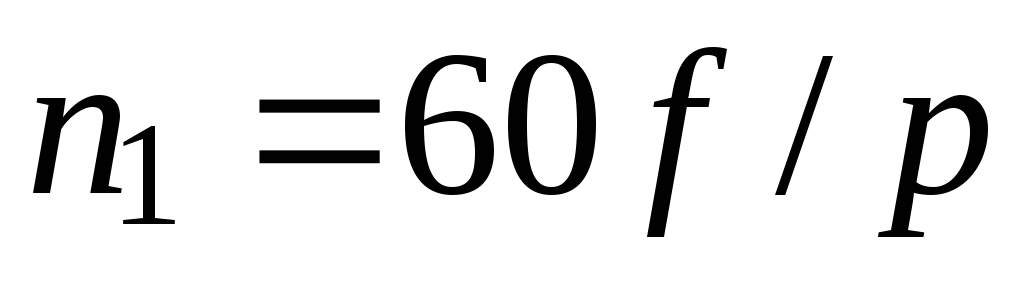 , कहां एफ 1
- मोटर की आपूर्ति करने वाले मुख्य वोल्टेज की आवृत्ति; आर- मशीन के डंडे के जोड़े की संख्या (विशेष रूप से, तीन स्टेटर वाइंडिंग एक जोड़ी डंडे, छह वाइंडिंग - दो जोड़े, आदि बनाते हैं)।
, कहां एफ 1
- मोटर की आपूर्ति करने वाले मुख्य वोल्टेज की आवृत्ति; आर- मशीन के डंडे के जोड़े की संख्या (विशेष रूप से, तीन स्टेटर वाइंडिंग एक जोड़ी डंडे, छह वाइंडिंग - दो जोड़े, आदि बनाते हैं)।
विचाराधीन मशीन को एसिंक्रोनस कहा जाता है क्योंकि इसमें रोटर की गति होती है एन 2 स्टेटर के घूर्णन चुंबकीय क्षेत्र की आवृत्ति के बराबर नहीं है एन 1. यदि ये आवृत्तियाँ समान थीं, तो स्टेटर चुंबकीय प्रवाह घूर्णन रोटर के सापेक्ष स्थिर होगा, और रोटर वाइंडिंग में EMF प्रेरित नहीं होगा, उनमें कोई धारा नहीं होगी और शाफ्ट पर कोई टॉर्क नहीं होगा।
स्टेटर और रोटर के क्षेत्र की घूर्णी आवृत्तियों के बीच के अंतर को पर्ची आवृत्ति कहा जाता है एनएस = एन 1 - एन 2, और आवृत्ति के साथ इसका संबंध एन 1 - फिसलने से एस, अर्थात।
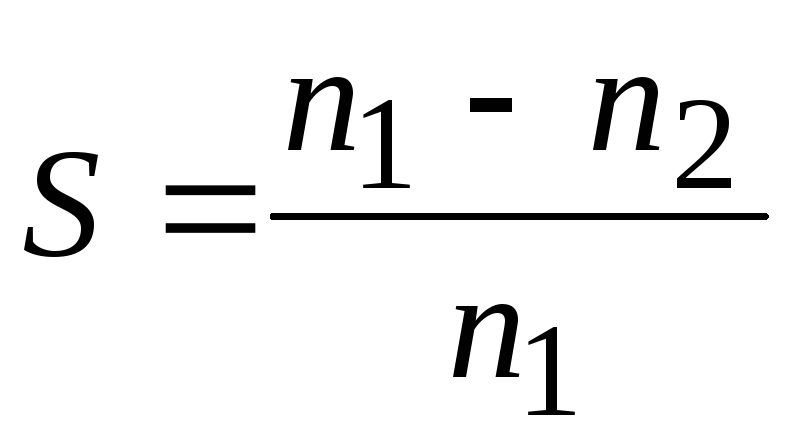 या (प्रतिशत के रूप में व्यक्त)
या (प्रतिशत के रूप में व्यक्त) 
एसिंक्रोनस मोटर में स्लिप चेंज रेंज 1 एस 0; प्रारंभ होने पर एस = 1, निष्क्रिय पर एस= 0.001 ... 0.005, रेटेड लोड पर एस = 0,03...0,07.
2. नरक की मुख्य विशेषताएं
रक्तचाप की मुख्य विशेषताओं में से एक यांत्रिक विशेषता है एन 2 = एफ(एम) - रोटेशन आवृत्ति की निर्भरता एन 2 पल से एममोटर शाफ्ट पर (चित्र.19.4)। प्राकृतिक यांत्रिक विशेषता 1 (अंजीर देखें। 19.4 और अंजीर। 19.5) एक प्रेरण मोटर को समीकरण द्वारा वर्णित किया गया है
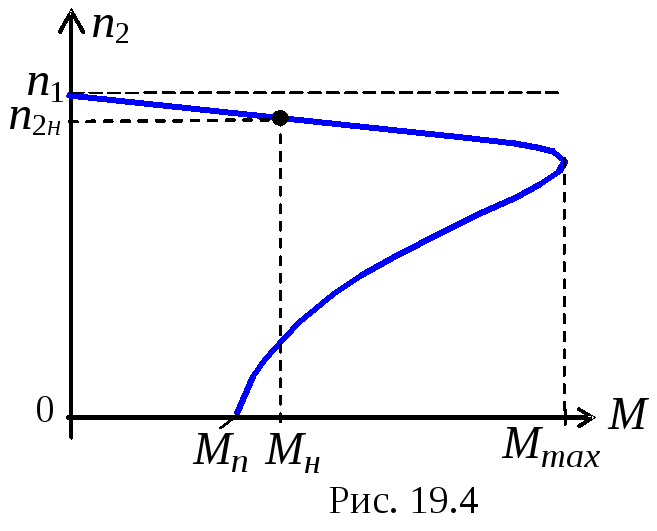
शाफ्ट पर भार में वृद्धि के साथ, पर्ची एसबढ़ जाती है, और रोटर की गति 5 ... 10%, यानी यांत्रिक विशेषता घट जाती है एन= ¦ ( एम) HELL कठिन है (चित्र 19.4 देखें);
आईएम रोटर के रोटेशन की दिशा बदलना - उलटना - मोटर की आपूर्ति करने वाले तीन-चरण प्रणाली के किसी भी दो तारों को स्विच करके किया जाता है।
AM टॉर्क फेज वोल्टेज के वर्ग के समानुपाती होता है यू 1 एफ नेटवर्क और पर्ची पर निर्भर करता है एस, अर्थात।
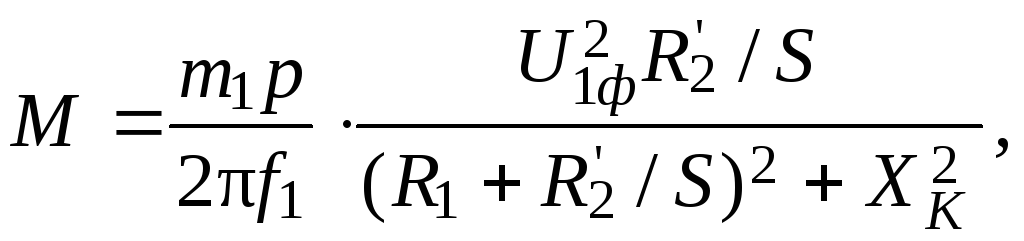
कहां एम 1 - स्टेटर चरणों की संख्या; एन एस प्रति
=
एक्स 1
+ ;
आर 1 ,
एक्स 1 और
;
आर 1 ,
एक्स 1 और  ,- स्टेटर वाइंडिंग का सक्रिय, आगमनात्मक प्रतिरोध और रोटर वाइंडिंग के कम प्रतिरोध।
,- स्टेटर वाइंडिंग का सक्रिय, आगमनात्मक प्रतिरोध और रोटर वाइंडिंग के कम प्रतिरोध।
प्रतिरोध के क्षण में वृद्धि के साथ एम साथशाफ्ट पर पर्ची बढ़ जाती है, जिससे टोक़ में मूल्य में वृद्धि होती है एम साथ... स्लाइड जिस पर टोक़ अपने अधिकतम मूल्य तक पहुँचता है एम मैक्स, को क्रिटिकल कहा जाता है और व्यंजक द्वारा पाया जाता है एस करोड़ /एन एस प्रति .
महत्वपूर्ण पर्ची मान एस करोड़और स्टार्टिंग टॉर्क एम एन एसरोटर सर्किट के प्रतिरोध पर निर्भर करता है (वक्र देखें 2
…4
अंजीर में। 19.5), और पल एम एन एसवृद्धि के साथ बढ़ता है  तक पहुंच गया एम मैक्सपर +
तक पहुंच गया एम मैक्सपर +
एन एस प्रति, कहां प्रारंभिक धारा को कम करने के लिए घाव रोटर के साथ आईएम में प्रयुक्त प्रारंभिक रिओस्टेट का कम प्रतिरोध है, प्रारंभिक टोक़ को बढ़ाता है (वक्र देखें) 4
अंजीर में। 19.5, बी), रोटर गति के सुचारू स्टार्ट-अप और विनियमन को सुनिश्चित करना (रिओस्टैटिक यांत्रिक विशेषताओं को देखें) 2
…4
अंजीर में। 19.5, बी).
एन एस प्रति, कहां प्रारंभिक धारा को कम करने के लिए घाव रोटर के साथ आईएम में प्रयुक्त प्रारंभिक रिओस्टेट का कम प्रतिरोध है, प्रारंभिक टोक़ को बढ़ाता है (वक्र देखें) 4
अंजीर में। 19.5, बी), रोटर गति के सुचारू स्टार्ट-अप और विनियमन को सुनिश्चित करना (रिओस्टैटिक यांत्रिक विशेषताओं को देखें) 2
…4
अंजीर में। 19.5, बी).
3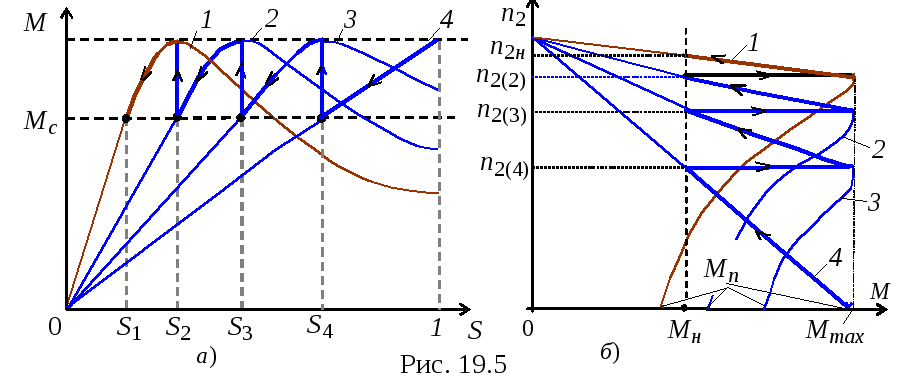 ... HEL . की ऑपरेटिंग विशेषताएँ
... HEL . की ऑपरेटिंग विशेषताएँ
 एक प्रेरण मोटर के प्रदर्शन का आकलन उसके प्रदर्शन घटता द्वारा किया जा सकता है, जो कि शुद्ध शक्ति के एक समारोह के रूप में ग्राफिक रूप से व्यक्त किया जाता है। आर 2 मात्रा: वर्तमान मैं 1 स्टेटर वाइंडिंग में, दक्षता
, पर्ची एस, शक्ति कारक cos
, उपयोगी क्षण एम
बीपी शाफ्ट पर यू 1
=
स्थिरांक
तथा एफ 1
=
स्थिरांक(अंजीर.19.6)। वे प्रयोगात्मक रूप से या समकक्ष सर्किट का उपयोग करके गणना द्वारा निर्धारित किए जाते हैं अतुल्यकालिक मोटर.
एक प्रेरण मोटर के प्रदर्शन का आकलन उसके प्रदर्शन घटता द्वारा किया जा सकता है, जो कि शुद्ध शक्ति के एक समारोह के रूप में ग्राफिक रूप से व्यक्त किया जाता है। आर 2 मात्रा: वर्तमान मैं 1 स्टेटर वाइंडिंग में, दक्षता
, पर्ची एस, शक्ति कारक cos
, उपयोगी क्षण एम
बीपी शाफ्ट पर यू 1
=
स्थिरांक
तथा एफ 1
=
स्थिरांक(अंजीर.19.6)। वे प्रयोगात्मक रूप से या समकक्ष सर्किट का उपयोग करके गणना द्वारा निर्धारित किए जाते हैं अतुल्यकालिक मोटर.
निष्क्रिय शक्ति आर 2 = 0; जबकि स्टेटर वाइंडिंग की धाराएँ मैं 0, एक घूर्णन चुंबकीय क्षेत्र बना रहे हैं, काफी बड़े हैं और 30 ... नाममात्र धाराओं का 50% मैं 1 एन... रोटर गति एन 20 = = (0,995…0,998) एन 1 .
जैसे-जैसे शाफ्ट पर भार बढ़ता है, स्टेटर करंट बढ़ता है, जैसा कि सक्रिय शक्ति में होता है आर 2 और आर 1. बदले में, शक्ति कारक बढ़ता है  ... इस मामले में, पर्ची एसबढ़ जाती है, और शाफ्ट गति एन 2 घटता है क्योंकि करंट और इलेक्ट्रोमैग्नेटिक टॉर्क में वृद्धि का यही एकमात्र कारण है।
... इस मामले में, पर्ची एसबढ़ जाती है, और शाफ्ट गति एन 2 घटता है क्योंकि करंट और इलेक्ट्रोमैग्नेटिक टॉर्क में वृद्धि का यही एकमात्र कारण है।
लत एम = एफ(आर 2) सूत्र द्वारा निर्धारित किया जाता है एम = 9550आर 2 /एन 2, जिससे यह निम्नानुसार है कि यह निर्भरता निर्देशांक की उत्पत्ति से गुजरने वाली थोड़ी घुमावदार सीधी रेखा है, क्योंकि शाफ्ट पर भार में वृद्धि के साथ, आईएम रोटर के रोटेशन की आवृत्ति थोड़ी कम हो जाती है।
शाफ्ट शक्ति पर IM शक्ति कारक की निर्भरता की प्रकृति, अर्थात cos
=
एफ(आर 2), अभिव्यक्ति cos . द्वारा निर्धारित किया जाता है
= पी 1 / और रेटेड लोड पर सामान्य औसत पावर IM के लिए 0.8 ... 0.89 के बराबर है। शाफ्ट cos पर घटते भार के साथ
घट जाती है और निष्क्रिय होने पर 0.2 ... 0.3 के मान तक पहुँच जाती है। इस मोड में, शाफ्ट पर शुद्ध शक्ति शून्य है, हालांकि, मोटर मुख्य से बिजली की खपत करता है, इसलिए क्योंकि
0
यहाँ शून्य के बराबर नहीं है।
और रेटेड लोड पर सामान्य औसत पावर IM के लिए 0.8 ... 0.89 के बराबर है। शाफ्ट cos पर घटते भार के साथ
घट जाती है और निष्क्रिय होने पर 0.2 ... 0.3 के मान तक पहुँच जाती है। इस मोड में, शाफ्ट पर शुद्ध शक्ति शून्य है, हालांकि, मोटर मुख्य से बिजली की खपत करता है, इसलिए क्योंकि
0
यहाँ शून्य के बराबर नहीं है।
दक्षता विशेषता एच = एफ(आर 2) एचईएल रेटेड लोड के शून्य (निष्क्रिय) से 0.4 ... 0.5 तक बहुत तेज़ी से बढ़ता है और उच्चतम मूल्य (0.85 ... 0.95.) तक पहुंच जाता है। रेटेड लोड के 0.7 से 0.8 की सीमा में, और फिर धीरे-धीरे गिर जाता है परिवर्तनशील हानियों में वृद्धि के कारण (चित्र 19.6 देखें)।
4. नरक मॉडल का संक्षिप्त विवरण
उनके लिए कार्य और पद्धति संबंधी निर्देश
कार्यान्वयन
कार्य 1. आईएम परीक्षण मॉडल (चित्र। 19.7) के इंटरफ़ेस से परिचित हों, खिड़कियों (फ़ील्ड) के उद्देश्य को निर्दिष्ट करते हुए, बदलने के लिए तीर के साथ प्रदान किए गए सहित, उदाहरण के लिए, शाफ्ट पर प्रतिरोध का क्षण, प्रतिरोध प्रारंभिक रिओस्टेट, स्टेटर वाइंडिंग की कनेक्शन योजना का विकल्प, और आउटपुट मात्रा की खिड़कियां भी जो माप उपकरणों की रीडिंग का अनुकरण करती हैं।
विकल्प के अनुसार एनमोटर के प्रकार का चयन करें (तालिका 1 से विषम वेरिएंट के लिए, गिलहरी-पिंजरे रोटर के साथ AM, और सम के लिए - तालिका 2 से, AM एक चरण रोटर के साथ, जहां एन- समूह के शैक्षिक पत्रिका में छात्र के उपनाम प्रविष्टि की संख्या के साथ मेल खाता है), रिपोर्ट में अपना नाममात्र डेटा लिखें: नाममात्र यांत्रिक शक्ति आर एन = आर 2 एनशाफ्ट पर, लाइन-टू-लाइन वोल्टेज यू एन और इसकी आवृत्ति एफ 1, रेटेड वर्तमान मैं एननाममात्र शाफ्ट गति एन एन, क्षमता एन, नाममात्र शक्ति कारक cos एन, ध्रुव जोड़े की संख्या आरस्टेटर का घूर्णन चुंबकीय क्षेत्र।
कार्य 2. रक्तचाप के "स्टार्ट-अप" को पूरा करें (मॉडलिंग के लिए कार्यक्रम शुरू करें और रक्तचाप के मापदंडों की गणना करें) और रक्तचाप की यांत्रिक और परिचालन विशेषताओं को "हटाएं"। इस कोने तक:
"प्रारंभ" बटन पर क्लिक करें, अर्थात, IM स्टेटर वाइंडिंग को "कनेक्ट" करें तीन चरण नेटवर्कप्रत्यावर्ती धारा और तालिका की पंक्ति 1 में लिखिए। 19.1 लाइन वोल्टेज मान यू 1, लाइन करंट मैं 1, सक्रिय शक्ति आर 1, "खपत" नेटवर्क से नरक, रोटर गति एन 2 निष्क्रिय मोड में (शाफ्ट पर उपयोगी टॉर्क एम= 0), जो डिस्प्ले स्क्रीन पर संबंधित क्षेत्रों में प्रदर्शित होते हैं;
- यांत्रिक को "हटाएं" एन 2 = एफ(एम) और कार्यकर्ता मैं 1 = एफ(आर 2), कोस = एफ(आर 2), एस = एफ(आर 2), आर 1 = एफ(आर 2), एम= एफ(आर 2), एच = एफ(आर 2) इंजन की विशेषताएं।
विशेषताओं को हटाने के लिए, आपको यह करना होगा:
IM मॉडल के कार्य क्षेत्र के निचले भाग में स्थित "लोड ऑन" बटन पर क्लिक करें, अर्थात, विद्युत चुम्बकीय ब्रेक के फील्ड वाइंडिंग सर्किट को "कनेक्ट" करें;
प्रतिरोध के क्षण को चरणबद्ध रूप से बढ़ाना (भार) एमबीपी शाफ्ट पर, तालिका में लिखें। 19.1 "मापने वाले उपकरणों" के संकेत 8 ... 9 पल के मूल्य एम: निष्क्रिय मोड से ( एम = 0, आर 2 = 0) मान के लिए एम = (1,2...1,5)एम एनया आर 2 = (1,2...1,5)आर 2 एन .
तालिका 19.1
|
मापन |
माप परिणाम |
गणना परिणाम |
|||||||
शाफ्ट पर भार में परिवर्तन का अवलोकन पल के मूल्यों द्वारा दोनों किया जा सकता है एम, और शक्ति मूल्यों द्वारा आर 1, नेटवर्क से HELL द्वारा उपभोग किया गया। उदाहरण के लिए, मापदंडों के साथ एक अतुल्यकालिक मोटर के लिए: आर 2 एन = 0.55 किलोवाट, एच एन = 0.705 और आर 1 एन = आर 2 एन /एच एन= 0.55 / 0.705 = 0.78 kW बिजली परिवर्तन से होगा आर 0 (निष्क्रिय शक्ति) to आर 1 = 1.1 ... 1.15 किलोवाट।
कार्य 3. IM में मॉडलिंग प्रक्रियाओं के डेटा के आधार पर, उपयोगी शक्ति की गणना करें पी 2 शाफ्ट पर, पर्ची एस, शक्ति कारक cos और दक्षता एचनिम्नलिखित गणना सूत्रों का उपयोग करते हुए विभिन्न भारों पर इंजन:
 = पी 2 /आर 1 ; क्योंकि
= पी 1 /
= पी 2 /आर 1 ; क्योंकि
= पी 1 / ,
,
व्यापक रूप से विभिन्न उद्योग राष्ट्रीय अर्थव्यवस्थाके साथ तीन-चरण अतुल्यकालिक मोटर्स प्राप्त किया गिलहरी पिंजरे रोटर... उनके पास स्लाइडिंग संपर्क नहीं हैं, डिजाइन और रखरखाव में सरल हैं। एक विस्फोटित गिलहरी-पिंजरे मोटर को अंजीर में दिखाया गया है। 1. इसके मुख्य भाग स्टेटर और रोटर हैं। स्टेटर और रोटर कोर विद्युत स्टील शीट से बने होते हैं।
स्टेटर कोर के खांचे में, तीन-चरण घुमावदार रखी और तय की जाती है। आपूर्ति नेटवर्क के वोल्टेज और मोटर डेटा के आधार पर, यह एक स्टार या त्रिकोण से जुड़ा होता है। स्टेटर वाइंडिंग के टर्मिनलों को चिह्नित किया जाता है, जिससे वांछित कनेक्शन आरेख की असेंबली की सुविधा मिलती है।
GOST 183-74 * के अनुसार, व्यक्तिगत चरणों के वाइंडिंग के टर्मिनलों के निम्नलिखित पदनाम क्रमशः पहले चरण C1 और C4, दूसरे - C2 और C5 और तीसरे - SZ और की शुरुआत और अंत को अपनाते हैं। C6 (चित्र 2)। मोटर के टर्मिनल बॉक्स पर टर्मिनलों की व्यवस्था को किसी भी योजना के अनुसार वाइंडिंग के आसान कनेक्शन की आवश्यकता को पूरा करना चाहिए।रोटर वाइंडिंग अपने कोर से अलग नहीं है। यह, वेंटिलेशन ब्लेड के साथ, एल्यूमीनियम या इसके मिश्र धातुओं से कास्ट किया जाता है। घुमावदार छड़ें और शॉर्ट-सर्किटिंग रिंग तथाकथित गिलहरी पिंजरे का निर्माण करते हैं।
मोटर्स का डिज़ाइन वेंटिलेशन विधि और सुरक्षा की डिग्री पर निर्भर करता है।
अतुल्यकालिक गिलहरी-पिंजरे मोटर्सशीतलन विधि के संदर्भ में एकल श्रृंखला 4A और जीवित या घूमने वाले भागों के संपर्क से कर्मियों की सुरक्षा की डिग्री, साथ ही साथ मशीन में विदेशी निकायों के प्रवेश से, दो संस्करण हैं (GOST 14254-80): बंद उड़ा (पदनाम IP44), संरक्षित (पदनाम IP23) ...
IP44 डिज़ाइन वाले मोटर्स में एक अक्षीय वेंटिलेशन सिस्टम होता है। पंखे द्वारा हवा की आपूर्ति की जाती है और बिस्तर की बाहरी पसली की सतह के चारों ओर चलती है।
IP23 मोटर्स के लिए, एक दो तरफा रेडियल वेंटिलेशन सिस्टम विशेषता है, जो रोटर के शॉर्ट-सर्किटिंग रिंगों पर स्थित वेंटिलेशन ब्लेड का उपयोग करके किया जाता है।
चावल। 1 गिलहरी पिंजरे प्रेरण मोटर विस्फोट दृश्य
1 - स्टेटर, 2 - टर्मिनल बॉक्स, 3 - रोटर 4 - अंत ढाल, 5 - पंखा, 6 - पंखा आवरण
इस श्रृंखला के इंजनों में निम्नलिखित पदनाम संरचना है: 4 - श्रृंखला की क्रम संख्या; ए - मोटर के प्रकार का नाम - अतुल्यकालिक; ए - एल्यूमीनियम से बने फ्रेम और ढाल; एक्स - एल्यूमीनियम फ्रेम और कच्चा लोहा ढाल; 56-355 - रोटेशन की धुरी की ऊंचाई; एस, एल, एम - शरीर की लंबाई के साथ स्थापना आयाम; ए, बी - कोर की लंबाई का पदनाम (पहली लंबाई ए है, दूसरी बी है); 2, 4, 6, 8, 10, 12 - डंडों की संख्या; - इंजनों का जलवायु संशोधन; 3 - प्लेसमेंट श्रेणी। उदाहरण के लिए: 4АА56А2УЗ - श्रृंखला 4 की इलेक्ट्रिक मोटर, अतुल्यकालिक, संलग्न डिजाइन, फ्रेम और एल्यूमीनियम से बने असर ढाल, 56 मिमी की रोटेशन अक्ष ऊंचाई के साथ, पहली लंबाई का कोर, दो-पोल, मध्यम जलवायु वाले क्षेत्रों के लिए, स्थान श्रेणी 3.
अंजीर। 2 कनेक्ट होने पर इंजन शील्ड पर टर्मिनलों का स्थान: ए - एक स्टार द्वारा; बी - त्रिकोण 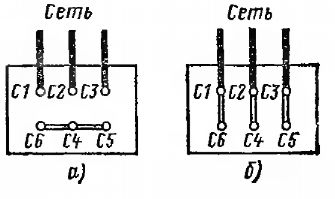
तालिका एक
इंजन का प्रकार |
रेटेड पावर, किलोवाट |
||
एन = 3000 आरपीएम |
|||
एन = 1500 आरपीएम |
|||
एन = 1000 आरपीएम |
|||
तालिका की निरंतरता। 1
इंजन का प्रकार |
रेटेड पावर, किलोवाट |
||
4A श्रृंखला के कम-शक्ति वाले इंजनों का मुख्य तकनीकी डेटा तालिका में दिया गया है। 1.
एआई इंडक्शन मोटर्स की एक श्रृंखला विकसित और निर्मित की गई है। इस श्रृंखला की मशीनों की ऊर्जा, प्रारंभ और कंपन शोर विशेषताओं में सुधार नई सामग्रियों और डिजाइन समाधानों के उपयोग के माध्यम से प्राप्त किया जाता है।
AI सीरीज के लो-पावर इंजन का मुख्य तकनीकी डाटा टेबल में दिया गया है। 2.
तीन चरण वर्तमान, स्टेटर वाइंडिंग के साथ गुजरते हुए, एक घूर्णन चुंबकीय क्षेत्र बनाता है। क्षेत्र n के घूर्णन की आवृत्ति को तुल्यकालिक कहा जाता है। यह आपूर्ति वोल्टेज की आवृत्ति फाई और मशीन के ध्रुव जोड़े पी की संख्या पर निर्भर करता है: ![]()
और f 1-50 Hz पर मान लेता है: 3000 rpm (p- == 1), 1500 rpm (p = 2), 1000 rpm (p = 3), आदि।
मुख्य वोल्टेज आवृत्ति के लिए हमारे पास होगा: 
इंडक्शन मोटर का रोटर, क्षेत्र के रोटेशन की दिशा में घूमता है, एक आवृत्ति को सिंक्रोनस की तुलना में थोड़ा कम विकसित करता है, जिसे एसिंक्रोनस कहा जाता है।
तालिका 2
इंजन का प्रकार |
रेटेड पावर, किलोवाट |
तुल्यकालिक रोटेशन आवृत्ति, आर / डब्ल्यू<н |
||
AIR80A2-OM2 |
||||
AIR80V4-OM2 |
||||
AIR80A6-OM2 |
||||
AIR80V6-OM2 |
||||
रोटर लैग को स्लिप एस की विशेषता है। यदि रोटर की गति को ri2 द्वारा निरूपित किया जाता है, तो स्लिप संबंध रूप लेता है 
या, %, 
(2) से यह इस प्रकार है कि एक इंडक्शन मोटर की पर्ची एकता से (स्टार्ट-अप पर, जब n2-0) से शून्य (एक तुल्यकालिक गति पर, यानी जब P2-P1) में बदल जाती है। ध्यान दें कि मोटर मोड में क्षेत्र और रोटर के रोटेशन की आवृत्ति की सटीक समानता हासिल नहीं की जाती है। हालांकि, मशीन की निष्क्रिय गति पर रोटर का अंतराल इतना छोटा है कि इसे उपेक्षित किया जा सकता है। पूर्ण इंजन लोड पर स्लिप मान आमतौर पर 4-6% होते हैं।
रोटर गति के लिए अभिव्यक्ति संबंध (2) से प्राप्त की जा सकती है:
ध्यान दें कि समानता के दाहिने हाथ के अंश (2) का एक निश्चित भौतिक अर्थ है। क्षेत्र की घूर्णी गति और रोटर के बीच का अंतर सापेक्ष घूर्णी गति है, अर्थात रोटर एनएस, या स्लिप आवृत्ति के सापेक्ष क्षेत्र की घूर्णी आवृत्ति।
उदाहरण। ज्ञात "1 = 1000 रेव / एमएन, एस = 4%। रोटर गति और सापेक्ष गति की गणना करें।
हमारे पास है: ला = 1000 (1-0.04) = 960 आरपीएम, एनएस = एनएल-एन 2 = 1000-960 = = 40 आरपीएम।
घूर्णन चुंबकीय क्षेत्र द्वारा रोटर घुमावदार में प्रेरित ईएमएफ और धाराओं की आवृत्ति पर्ची आवृत्ति द्वारा निर्धारित की जाती है: 
सरल परिवर्तनों के माध्यम से यह अभिव्यक्ति रूप में कम हो जाती है
वे। ईएमएफ और रोटर धाराओं की आवृत्ति ft - const स्थिति के तहत पर्ची के समानुपाती होती है।
उदाहरण। पिछले उदाहरण के लिए रोटर वर्तमान आवृत्ति का पता लगाएं।
हमारे पास - / 2 = / एलएस = 50-0.04 = 2 हर्ट्ज है।
मोटर द्वारा उत्पन्न शक्ति सामान्य भार के भीतर खिसकने के समानुपाती होती है। इसलिए मशीन पर लोड का अंदाजा स्लिप से लगाया जा सकता है। ![]()

इसके संचालन के दौरान इंजन की शक्ति का उपयोग अलग हो सकता है। बिजली उपयोग कारक ![]()
जहाँ Pg मनमाना भार पर उपयोगी शक्ति है; Rnom - रेटेड पावर, यानी उपयोगी शक्ति जिसके लिए इलेक्ट्रिक मशीन को डिज़ाइन किया गया है।
रेटेड पावर रेटेड वोल्टेज से मेल खाती है। उसी समय, मोटर रेटेड वर्तमान की खपत करता है, जिसमें गति, शाफ्ट शक्ति, दक्षता और कॉस के रेटेड मान होते हैं।
मोटर का उद्देश्य विद्युत ऊर्जा को यांत्रिक ऊर्जा में बदलना है। रूपांतरण प्रक्रिया के दौरान, नुकसान होता है। वे सक्रिय शक्ति के उस हिस्से का प्रतिनिधित्व करते हैं जो वाइंडिंग को गर्म करने, स्टेटर कोर के स्टील और घर्षण बलों पर काबू पाने पर खर्च किया जाता है।
शाफ्ट पर मोटर द्वारा विकसित नेट पावर पी 2 का अनुपात, नेटवर्क से खपत की जाने वाली सक्रिय पावर पी \ के अनुपात को दक्षता कहा जाता है: ![]()
सक्रिय के अलावा, मोटर प्रतिक्रियाशील चुंबकीय शक्ति की खपत करता है, जो चुंबकीय प्रवाह के गठन के लिए आवश्यक है। इस प्रकार, इंजन 5 की कुल शक्ति में सक्रिय और प्रतिक्रियाशील घटक होते हैं: 
जहां Q इंजन की प्रतिक्रियाशील शक्ति है।
परिवर्तित शक्ति के सापेक्ष मूल्य को शक्ति कारक द्वारा आंका जाता है। मशीन की शक्ति का जितना बेहतर उपयोग किया जाता है, शक्ति का कारक उतना ही अधिक होता है। इसकी गणना करने के लिए, यह सक्रिय शक्ति को कुल से विभाजित करने के लिए पर्याप्त है: 
जहां यू, आई - वोल्टेज और करंट के चरण मान।
उदाहरण। गिलहरी-पिंजरे रोटर के साथ तीन-चरण अतुल्यकालिक मोटर की ढाल पर, निम्नलिखित पदनाम हैं: डी "ए। 220 /
380 वी, 10.5 / 6.1 ए, 2.8 किलोवाट, 50 हर्ट्ज, 2880 आरपीएम, सीडीडी = 81.5%, क्योंकि 
(इस मामले में यह 3000 आरपीएम के बराबर है), तो रेटेड लोड पर पर्ची होगी:
रेटेड लोड पर पूर्ण मोटर शक्ति SHOM = 3l / nom / nom = 3-220-6.1 "4000 VA = 4 kVA।
रेटेड लोड पर मोटर द्वारा खपत सक्रिय शक्ति,
Rxnom = 31 / nom / nom "" F, nom = 3-220-6.1-0.86 = 3.44 kW।
रेटेड लोड पर मोटर नुकसान
2द्रिश = आरटीएसएच - पी2 = 3.44 - 2.8 = 0.64 किलोवाट।
तालिका में डेटा का उपयोग करना। 1 मोटर्स के पावर फैक्टर की उनकी रेटेड पावर (चित्र 3) पर निर्भरता के घटता को दर्शाता है।
वक्र 1 3000 आरपीएम, 2 से 1500 आरपीएम और 3 से 1000 आरपीएम की तुल्यकालिक गति से मेल खाता है। अंजीर से। 3 यह देखा जा सकता है कि इंडक्शन मोटर का पावर फैक्टर रेटेड पावर और सिंक्रोनस स्पीड पर निर्भर करता है।
निरंतर तुल्यकालिक गति ("! = Const) पर शक्ति में वृद्धि के साथ, वायु अंतर का सापेक्ष मूल्य कम हो जाता है। यह सापेक्ष प्रतिक्रियाशील चुंबकीय शक्ति को भी कम करता है और शक्ति कारक को बढ़ाता है। निरंतर रेटेड मोटर शक्ति पर तुल्यकालिक गति को बढ़ाकर समान परिणाम प्राप्त किया जाता है। हाई-स्पीड मशीनों में छोटे आयाम होते हैं, जो टोक़ में कमी के कारण स्टेटर और रोटर कोर के बीच वायु स्थान की मात्रा को काफी कम कर देता है।
नाममात्र at - const पर मोटर्स की विशिष्ट चुंबकीय शक्ति की निर्भरता के वक्र अंजीर में दिखाए गए हैं। 4, जिससे यह देखा जा सकता है कि रेटेड मोटर शक्ति जितनी अधिक होगी और समकालिक गति जितनी अधिक होगी, विशिष्ट चुंबकीय शक्ति उतनी ही कम होगी।
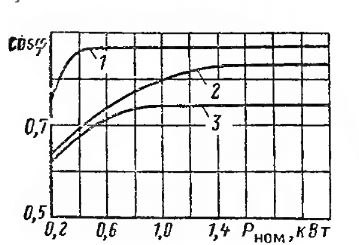
चावल। 3 तुल्यकालिक गति के विभिन्न मूल्यों पर अतुल्यकालिक मोटर्स की रेटेड शक्ति पर शक्ति कारक की निर्भरता के वक्र:
1 - "1 = 3000 आरपीएम; 2- / 2, -1500 आरपीएम; 3 - "1 = 1000 आरपीएम 
चावल। 4. तुल्यकालिक गति के विभिन्न मूल्यों पर अतुल्यकालिक मोटर्स की रेटेड शक्ति पर विशिष्ट चुंबकीय शक्ति की निर्भरता के वक्र:
1 - एन, "> 1000 आरपीएम; 2- "1-1500 आरपीएम; 3 - "1 = 3000 आरपीएम
अंजीर में दिखाए गए निर्भरता से संक्रमण। 3, अंजीर में निर्भरता के लिए। 4 निम्नलिखित अनुपातों का उपयोग करके उत्पादित किया जाता है:
(7)
जहाँ दिखाएँ, Qhom - रेटेड लोड पर मोटर की पूर्ण और प्रतिक्रियाशील शक्ति।
अंजीर की तुलना। 3 और 4, मोटर्स के ऊर्जा प्रदर्शन और उनकी आपूर्ति प्रणाली पर पावर फैक्टर के प्रभाव के बारे में निष्कर्ष निकालना आसान है: किसी दिए गए रेटेड लोड (Pg = Pnom) पर उच्च शक्ति कारक वाले मोटर्स में कम प्रतिक्रियाशील चुंबकीय शक्ति होती है। . इससे कुल शक्ति में कमी आती है और तदनुसार, नेटवर्क से खपत होने वाली धारा में कमी आती है।
नतीजतन, मशीन वाइंडिंग में बिजली के नुकसान कम हो जाते हैं और बिजली आपूर्ति प्रणाली के तारों में वोल्टेज ड्रॉप सीमित हो जाता है।
नेटवर्क से सीधा कनेक्शन स्टेटर सर्किट में दबाव धाराओं के साथ जुड़ा हुआ है। यह एक सर्वविदित तथ्य है। लेकिन सभी ने इस घटना के कारण के बारे में नहीं सोचा। हम इस तथ्य के अभ्यस्त हैं कि किसी भी इलेक्ट्रिक मोटर की धारा शाफ्ट पर टोक़ के सीधे आनुपातिक होती है। और यहां, ऐसा प्रतीत होता है, एक विरोधाभासी स्थिति है: स्टार्ट-अप के दौरान मोटर टोक़ सीमित है, और वर्तमान नाममात्र मूल्य से सात गुना अधिक हो सकता है। यह कैसे होता है?
यह सब एक अतुल्यकालिक मशीन के भौतिकी के बारे में है। स्टेटर का वैकल्पिक विद्युत चुम्बकीय क्षेत्र मोटर के रोटर वाइंडिंग में EMF को प्रेरित करता है। इस ईएमएफ का परिमाण, विद्युत चुम्बकीय प्रेरण के नियमों के अनुसार, स्टेटर के विद्युत चुम्बकीय क्षेत्र के परिवर्तन की दर पर निर्भर करता है, अर्थात रोटर (स्लिप से) के सापेक्ष इस क्षेत्र के रोटेशन की आवृत्ति पर।
लेकिन अगर वोल्टेज लागू होने के तुरंत बाद स्टेटर क्षेत्र घूमना शुरू कर देता है, तो रोटर को तेज करने के लिए कुछ समय चाहिए। और इंजन जितना अधिक शक्तिशाली और बड़ा होता है, रोटर को तेज होने में उतना ही अधिक समय लगता है - बढ़ा हुआ द्रव्यमान जड़ता को बढ़ावा देता है।
स्लिप की मात्रा, बदले में, स्टार्ट-अप के पहले क्षण में सबसे अधिक महत्व रखती है। इस समय, पर्ची एकता के बराबर है, रोटर अभी भी स्थिर है, और क्षेत्र पहले से ही अधिकतम गति से घूम रहा है। रोटर सर्किट में EMF अपने अधिकतम मूल्य तक पहुँच जाता है, जैसा कि रोटर करंट करता है।
रोटर करंट भी परिवर्तनशील होता है, इसलिए यह अपना स्वयं का परिवर्तनशील विद्युत चुम्बकीय क्षेत्र भी बनाता है। यह क्षेत्र मोटर के स्टेटर सर्किट में पहले से ही ईएमएफ को फिर से प्रेरित करता है। और उपर्युक्त ईएमएफ के प्रभाव में, स्टेटर में करंट का एक अतिरिक्त घटक प्रवाहित होने लगता है, जो रोटर के एमडीएफ की भरपाई करता है।
इस प्रकार, स्टेटर करंट हमेशा दो सह-दिशात्मक घटकों का योग होता है। एक घटक का मान स्टेटर वाइंडिंग के आंतरिक प्रतिरोध के कारण होता है। इस घटक का एक स्थिर मूल्य है, और इंजन की आदर्श निष्क्रिय गति पर, संपूर्ण स्टेटर करंट केवल इसके लिए कम हो जाता है।
और स्टेटर करंट का दूसरा घटक रोटर सर्किट में करंट पर निर्भर करता है और इंजन शुरू करने के पहले पल में अपने अधिकतम तक पहुँच जाता है, शून्य तक घट जाता है क्योंकि यह आदर्श निष्क्रियता के बिंदु तक पहुँच जाता है। दूसरे घटक के कारण, मोटर का स्टेटर करंट स्टार्ट करते समय इतने बड़े मूल्यों तक पहुँच जाता है।
केवल एक बारीकियां अस्पष्ट रहती हैं: एक इंडक्शन मोटर का बड़ा स्टार्टिंग करंट डीसी मोटर्स के मामले में उतना बड़ा स्टार्टिंग टॉर्क क्यों नहीं देता है? कारण यह है कि मोटर टॉर्क केवल रोटर करंट के सक्रिय घटक द्वारा बनाया जाता है, अर्थात वह घटक जो रोटर EMF के साथ चरण में होता है।
और सक्रिय और प्रतिक्रियाशील रोटर करंट का अनुपात निर्भर करता है, सबसे पहले, रोटर वाइंडिंग में प्रेरित ईएमएफ की आवृत्ति पर। आवृत्ति जितनी अधिक होती है, उतनी ही अधिक "चर" धारा बन जाती है और रोटर वाइंडिंग की आगमनात्मक प्रतिक्रिया उतनी ही महत्वपूर्ण हो जाती है। और रोटर वाइंडिंग्स का आगमनात्मक प्रतिरोध जितना अधिक होता है, रोटर करंट उतना ही अधिक प्रतिक्रियाशील होता है।
हां, इंडक्शन मोटर के रोटर सर्किट में शुरुआती करंट बड़ा होता है, लेकिन यह मुख्य रूप से रिएक्टिव करंट होता है, यह एक बड़ा इलेक्ट्रोमैकेनिकल टॉर्क प्रदान नहीं कर सकता है। ईएमएफ आवृत्ति कम होने के बाद ही सक्रिय धारा आवश्यक मूल्य तक पहुँचती है और मोटर अपनी परिचालन विशेषता तक पहुँच जाती है। इंडक्शन मोटर्स को शुरू करने की दो समस्याओं का यही कारण है: सीमित शुरुआती टॉर्क और, इसके विपरीत, कई गुना अधिक स्टार्टिंग स्टेटर करंट।
रोटर ईएमएफ की अधिकतम आवृत्ति स्टार्ट-अप के ठीक समय पर पहुंचती है, जब रोटर स्थिर होता है। इस समय, रोटर ईएमएफ आपूर्ति नेटवर्क की आवृत्ति के साथ बदलता है - 50 हर्ट्ज। इसके बाद, जब मोटर विशेषता के कार्य खंड में पहुंचती है, तो यह आवृत्ति कई हर्ट्ज तक गिर जाती है, और वाइंडिंग का प्रेरक प्रतिरोध मायने रखता है, और रोटर करंट लगभग पूरी तरह से सक्रिय हो जाता है।

कुछ समूहों में कीमोथेरेपी दवाओं का विभाजन बल्कि मनमाना है। यह विभाजन विभिन्न पर आधारित है ...

1 बोतल में शामिल हैं: सक्रिय पदार्थ: पेरासिटामोल - 1.2 ग्राम (50 मिलीलीटर सिरप की एक बोतल के लिए) या 2.4 ग्राम (एक बोतल के लिए ...

चिकित्सा के विभिन्न क्षेत्रों में उपयोग की जाने वाली कई दवाओं में इफेड्रिन होता है। यह पदार्थ क्या है? क्या ...

शुभ दिन, मेरे प्रिय पाठकों! मैं अपने महाकाव्य को एक बहुत ही नाजुक विषय पर जारी रखता हूं - बवासीर का उपचार। इसके साथ ही...

सबसे प्रभावी दवाओं में से एक Natalsid - बवासीर के लिए एक बचाव दवा है। हर दिन वो मिलता है...

आधुनिक प्रौद्योगिकियां हमें रहने की जगह, मौसम, उपलब्धता की परवाह किए बिना हमेशा संपर्क में रहने की अनुमति देती हैं ...

ट्राइबेसिक फॉस्फोरिक एसिड कैल्शियम के साथ तीन प्रकार के लवण बनाता है। यह कैल्शियम हाइड्रोजन फॉस्फेट CaHPO4 है, ...

एक कैप्सूल में शामिल हैं: सक्रिय संघटक: मेल्डोनियम - 250 मिलीग्राम या 500 मिलीग्राम। Excipients: मैग्नीशियम ...

1378 0 कांच का हास्य प्राकृतिक मूल की तैयारी है जो पुनर्स्थापित करता है और जोड़ता है ...
यह एक विदेशी भाषा में महारत हासिल करने के लिए एक बुनियादी शर्त है। सिर्फ बात करना ही नहीं जरूरी है...

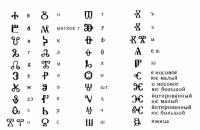
और मैं ने एक और जन्तु को पृय्वी पर से चढ़ते हुए देखा, और उसके दो सींग हैं, वह मेम्ने के समान है, और क्रिया सर्प के समान है" (प्रका ....

10 जुलाई 2012 1 1864 सेंट पीटर्सबर्ग में Mytninskaya स्क्वायर पर एक घटना हुई, जो हमेशा के लिए प्रवेश कर गई ...

अर्मेनिया के अपोस्टोलिक चर्च; रूसी भाषी टिप्पणीकारों के बीच, ज़ारिस्ट रूस में पेश किया गया व्यापक है ...

, जापान में, जहां आधुनिक उपकरणों के डेवलपर्स शायद सबसे साहसी विचारों द्वारा देखे जाते हैं, और उनके लिए ...
पृथ्वी पर बहुत कुछ हमसे छिपा है, लेकिन बदले में हमें अपने साथ एक जीवित संबंध का एक गुप्त अंतरंग एहसास दिया गया है ...
वर्तमान काल के वास्तविक प्रतिभागी शिक्षा प्रपत्र I.p.ed.ch. मी और औसत जीनस बाकी के रूप ...