Ako sa zbaviť toxínov: ako sa aktívne uhlie
Tablety s aktívnym uhlím sú určite v každej súprave prvej pomoci. Je to dobre známy adsorbent a používa sa ...
Archaická povaha väčšiny pohonov je už dlho evidentná a pokrokové dizajnové nápady už dlhé roky pracujú na úlohe radikálnej výmeny typických pohonov v kovoobrábacích zariadeniach s niektorými ďalšími pokročilejšími. Ako sa hovorí, geniálny je jednoduchý. A takéto skvelé rozhodnutie bolo použitie lineárnych motorov ako pohonov pohonu stroja.
Elektromagnetický systém Lineárny motor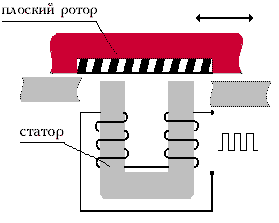
Trvalo mnoho rokov práce vedcov a dizajnérov v rôznych krajinách pred dosiahnutím úspechu. Mimoriadne intenzívna práca bola vykonaná v Japonsku, kde bol elektromagnetický pohon (už ako lineárny pohon) prvýkrát úspešne použitý ako hnací mechanizmus pre vysokorýchlostné vlaky. Tam boli tiež pokusy vytvoriť lineárne pohony pre kovoobrábacie stroje, ale oni mali značné nevýhody: oni vytvorili silné magnetické polia, zohrievali sa, a čo je najdôležitejšie, nezabezpečil jednotnosť v pohybe RO. Až na prahu nového tisícročia sa sériová výroba obrábacích strojov (v súčasnosti prevažne elektrická iskra (EDM)) začína zásadne novými lineárnymi motormi, ktoré riešia všetky problémy zabezpečenia rovnomerného pohybu obrábacích strojov s ultra vysokou presnosťou, s veľkým rozsahom regulácie rýchlosti, s obrovskými zrýchleniami, okamžitými opačne, s jednoduchou údržbou a uvedením do prevádzky, atď.
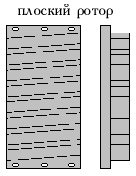
Dizajn LD sa v podstate veľa nezmenil. V skutočnosti sa motor skladá len z 2 (!) Prvkov: elektromagnetického statora a plochého rotora, medzi ktorými je len vzduchová medzera. Tretím povinným prvkom je optické alebo iné meradlo s vysokou diskrétnosťou (0,1 µm). Bez nej nemôže riadiaci systém stroja určiť aktuálne súradnice. Ako stator, tak rotor sú vyrobené vo forme plochých, ľahko odnímateľných blokov: stator je pripevnený k rámu alebo stĺpiku stroja, rotor - k pracovnému telesu (PO). Rotor je jednoduchý: skladá sa zo série pravouhlých permanentných magnetov (vzácnych zemín). Magnety sú upevnené na tenkej doske špeciálnej vysokopevnostnej keramiky, ktorej koeficient teplotnej rozťažnosti je dvakrát menší ako koeficient žuly. Použitie keramiky v spojení s účinným chladiacim systémom riešilo mnoho problémov lineárnych pohonov spojených s teplotnými faktormi, prítomnosťou silných magnetických polí, konštrukčnej tuhosti atď.
Presné a rovnomerné zásobovanie RO v celom rozsahu rýchlostí a zaťažení zabezpečujú dve technické riešenia:
- upevnenie permanentných magnetov v určitom pevnom uhle, ktorý bol otvorený počas dlhodobých experimentov;
- implementácia vysoko účinného 6-fázového systému riadenia impulzov (SMC systém).
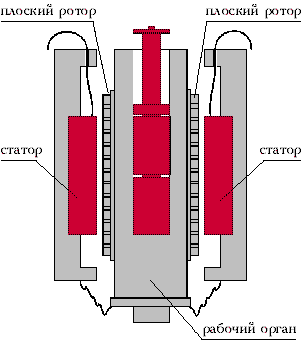
Spoločnosť SODIK vo svojich továrňach zorganizovala sériovú výrobu širokého sortimentu LD s vlastnosťami: s posuvným zdvihom od 100 do 2220 mm, s maximálnou rýchlosťou pohybu PO do 180 m / min s zrýchleniami do 20G (!!!) s presnosťou vykonania špecifikovaných pohybov ( v normálnom prevádzkovom režime) 0,0001 mm (0,1 μm). Vyhrievanie týchto LD počas prevádzky neprekročí + 2 ° C od teploty miestnosti. Poskytuje takmer okamžité zastavenie RO, reverznú, okamžitú odozvu pohonu na príkazy CNC systému atď. Niekoľko lineárnych motorov je namontovaných na rovnakom pracovnom telese (napríklad na zvýšenie výkonu). Tak je usporiadaný najmä pohon Z osí všetkých šijacích strojov EE "SODIK".
Ako bolo uvedené, tak stator, ako aj LD rotor sú extrémne jednoduché. Stator je vytvorený v tvare obdĺžnikového bloku a je upevnený niekoľkými skrutkami k nosnej konštrukcii stroja. V osi pohonu Z - dva statory. Sú umiestnené na oboch stranách vertikálneho ramena. Ku každému statoru sú pripojené dve rúrky chladiaceho systému statora a napájacie a kontrolné káble. Doska rotora je pevne priskrutkovaná k pohyblivému vozíku (PO). Pretože sú v pohone osi Z dve LD, na vozíku sú namontované dva rotory, každý protiľahlý k jeho statoru. Systém špeciálnych vodidiel a pneumatického vyváženia poskytuje výnimočnú jednoduchosť jazdy bez námahy. Pohony pozdĺž osí X, Y prepichovacích strojov a pohony X, Y, U, V drôtových rezacích strojov sú jednoduchšie - všetky majú jednu LD.
Vytlačiť
Elektrický pohon
Historicky, priemysel nejako závisí od rôznych druhov skrutkových a pásových prevodoviek alebo pneumatických mechanizmov na riešenie problémov s lineárnym polohovaním. Rastúci dopyt po zvýšených priepustných rýchlostiach, miliónoch pracovných cyklov, prispôsobení a flexibilite programovania odhalili nedostatky týchto mechanizmov. Často je potrebné robiť kompromisy, pokiaľ ide o presné riadenie polohy v pohybe dopredu.
Výrobcovia pneumatických pohonov nedávno aktualizovali pneumatické zariadenia na ovládanie valcov s externými riadiacimi ventilmi, polohovými snímačmi a elektronikou servopohonov na riešenie niektorých z týchto ťažkostí. Nie je však také ľahké vybudovať uzavretý polohovací systém vzhľadom na vysoký koeficient trenia a dynamickú viskozitu stlačeného vzduchu. Manažment sa stáva problematickým kvôli pružnosti a treniu vzduchu, ako aj treniu piestu.
Technológia lineárneho motora s priamym pohonom poskytuje oveľa lepší prístup k riešeniu problémov s polohovaním. Táto technológia zahŕňa priamu aplikáciu elektromagnetickej sily bez použitia remeňa, guľôčkového pohonu alebo iného medziproduktu. Lineárny pohon vytvára priamy lineárny pohyb a neprenáša rotačný pohyb na translačný pohyb.
Najjednoduchší spôsob, ako opísať zariadenie s lineárnym motorom, je reprezentovať rotačný motor s permanentnými magnetmi, rezaný pozdĺžne a otočený do roviny. Tradičné lineárne motory majú presne tento dizajn.
Nové lineárne motory, takzvaný rúrkový lineárny pohon, majú solenoidový tvarový faktor.
Samotný motor je umiestnený v nemagnetickom puzdre z nehrdzavejúcej ocele, tzv. Samonosné vinutie je umiestnené vo vnútri vozíka spolu s klzným ložiskom zo špeciálneho polymérneho materiálu. Vo vnútri vinutia je pohyblivý prvok - tyč. Tyč je dutý nemagnetický valec z nehrdzavejúcej ocele, v ktorom sú umiestnené malé ultrazvukové magnety vzácnych zemín vo forme tabliet. Pohyblivá tyč je kľúčovým komponentom motora, predstavuje patentovanú konštrukciu, ktorá umožňuje vytvoriť presné sínusové magnetické pole po celej jeho dĺžke. Táto funkcia umožňuje použitie snímačov spätnej väzby integrovaných v kryte motora namiesto tradičných externých snímačov polohy. Je to dôležité, pretože externé snímače s lineárnym posunom môžu často stáť takmer rovnako ako samotný pohon, navyše samotné sú vysoko presné zariadenia, ktoré vyžadujú špeciálne podmienky prostredia, jemné doladenie a údržba, Integrované Hall senzory sú umiestnené na elektronickej doske pod ochranným krytom vozíka.
Tubulárny tvarový faktor ponúka ohromujúce výhody. Táto konštrukcia poskytuje matematicky dokonalú orientáciu. magnetické pole medzi vinutiami motora vozíka a magnetickou tyčou. Všetky magnetické silové vedenia križujú prúdové vodiče v pravom uhle. Táto orientácia vám umožní vytvoriť maximálne úsilie a efektívnosť. Vysoká účinnosť zase znamená minimálne množstvo tepla, ktoré maximalizuje počet pracovných cyklov.
Lineárny elektromotor je možné ovládať pomocou ľubovoľného trojfázového servomotora s jednosmerným prúdom, ktorý má tiež rozhranie spätnej väzby sin / cos. Najlepší dynamický výkon sa však dá dosiahnuť len s použitím ovládačov špeciálne optimalizovaných pre prácu s lineárnymi motormi. Najmä tieto typy regulátorov pohybu ponúka spoločnosť Copley Controls. 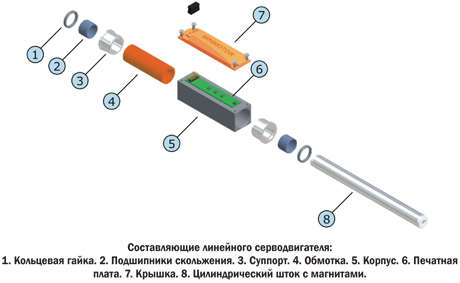
Rotačný pohyb sa spravidla transformuje na translačné pomocou nasledujúcich riešení:
- Skrutka skrutkovej matice
- Guľová skrutka
- Prevodovka
- Pásový pohon.
Stručne zvážte tieto transformačné prenosy.
2.1. Prešmyk skrutky matice: sú to hnací mechanizmus používaný na premenu rotačného pohybu skrutky na translačný pohyb matice; pracuje na princípe trecieho sklzu.
Výhody: nízka cena, nezvratný priebeh, vysoká vyvinutá sila.
Nevýhody: Účinnosť tohto prenosu spravidla závisí od typu hnacieho motora a je približne 10 - 40%; zariadenie sa vyznačuje opotrebovaním a stále rastúcou vôľou; skrutka sa musí udržiavať čistá, dokonca aj malé znečistenie môže viesť k zníženiu účinnosti alebo rušeniu systému.
2.2.Guľôčkové skrutky: Princíp činnosti je rovnaký ako princíp prenosu skrutky a matice, okrem toho, že matica obsahuje skrutkové drážky krivočiareho profilu. Drážky slúžia ako obežné dráhy pre loptičky, ktoré sa pohybujú medzi závitmi skrutky a maticou. Guľôčky sa pohybujú pozdĺž uzavretej trajektórie - keď sa skrutka otáča, guľôčky sa ťahajú do pohybu pozdĺž drážok skrutiek, postupne sa pohybujú maticou a vracajú sa do svojej pôvodnej polohy cez prepadový kanál.
Výhody: prevodovka má veľmi vysoký stupeň účinnosti - až 98%, dlhú životnosť, vysokú presnosť a nízku vôľu. Nevýhody: vysoké náklady; pri použití guľových skrutiek je potrebné brať do úvahy významné axiálne zaťaženia vyvolané na výstupnom hriadeli motora, v dôsledku čoho sa vyžaduje použitie prídavnej podpery ložiska; skrutka sa musí tiež udržiavať v čistote, aby sa zabránilo rušeniu.
2.3.Prevodovka: ozubené koleso, otáčajúce sa na hriadeli motora, poháňa koľajnicu stojana. Výhody: ide o pomerne efektívne riešenie z ekonomického hľadiska, vhodné aj pre aplikácie, kde sa vyžaduje veľká výtlačná dĺžka, veľké úsilie a presnosť; účinnosť prenosu dosahuje 95%.
Nevýhody: konštrukcia má spravidla vôľu, aby sa znížila vôľa, je potrebné vyrábať kontaktné zuby s vyššou presnosťou alebo zvýšiť prítlak medzi ozubeným kolesom a ozubeným hrebeňom, vysoká prítlačná sila spôsobuje veľké radiálne zaťaženie na výstupnom hriadeli motora alebo prevodovky; pri jazde je mierne zvlnenie rýchlosti; pohyb je relatívne hlučný.
2.4.Pohon pásu: kladka na hriadeli otáča pás, ktorý pohybuje nákladom v lineárnom smere.
 Výhody: lacné riešenie, presnosť nie lepšia ako 50 mikrónov.
Výhody: lacné riešenie, presnosť nie lepšia ako 50 mikrónov.
Nevýhody: pás je vystavený opotrebeniu pri vysokých rýchlostiach a zaťažení; pás sa môže natiahnuť; nízka vôľa vyžaduje vysoký stupeň napnutia pásu, čo zase zvyšuje radiálne zaťaženie na výstupnom hriadeli.
Čo sa týka lineárnych motorov, absorbovali takmer všetky výhody vyššie opísaných zariadení a eliminovali väčšinu ich nevýhod. Napríklad absencia skrutky, matice a iných mechanických komponentov robí zariadenie s lineárnym servomotorom s nízkou hlučnosťou. Absencia prvkov podliehajúcich opotrebeniu zvyšuje životnosť motorov. Napríklad, ak potrebujete vysokú presnosť polohovania pri nízkych zaťaženiach a vysokých rýchlostiach, potom je lineárny motor schopný zabezpečiť oveľa dlhšiu životnosť než servopohon s guľôčkovými skrutkami. Z tých istých dôvodov lineárne ovládače v trubicovom tvare nevykazujú zotrvačnosť, chýbajú faktory ako hysterézia a vôľa. Výsledkom je vynikajúca dynamická tuhosť.
Nakoniec, rúrkové lineárne motory dnes nie sú na svojej fyzickej hranici. Požiadavky budúcich aplikácií vytvárajú potrebu neustáleho znižovania frekvencie a zvyšovania ich citlivosti. Preto limit veľkosti motora závisí od nákladov, nie od základnej fyziky.
3. Lineárne servomotory Faulhaber
 Na realizáciu vysoko presného programovateľného lineárneho pohybu ponúka Faulhaber rad lineárnych servomotorov.
Na realizáciu vysoko presného programovateľného lineárneho pohybu ponúka Faulhaber rad lineárnych servomotorov.
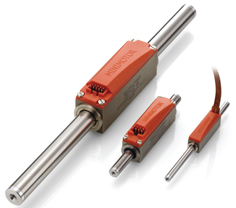
Tieto pohony s kompaktnou veľkosťou (motor LM2070 - 20 mm strana vozíka a dĺžka 70 mm) vyvíjajú sily do 27 N, môžu byť použité v režime motora (vozík sa pohybuje, keď je hriadeľ pevne uložený) av režime pohonu (pohyb hriadeľa, vozík je pevný ). Vďaka integrovaným lineárnym Hallovým senzorom je možné bez použitia externých senzorov dosiahnuť presnosť polohovania až do 120 µm a opakovateľnosť až do 40 µm.
 Lineárne servomotory nevyžadujú mazanie ani žiadnu dodatočnú údržbu počas prevádzky, sú tiché, dosahujú rýchlosť až 3,2 m / s a zrýchlenie až 198 m / s2. Lineárne motory Faulhaber sú ponúkané s rôznymi dĺžkami drieku. Verzie sú k dispozícii pre prácu s kompaktnými regulátormi výrobcu, ako aj s sinusovo-kosínusovou spätnou väzbou, čo umožňuje riadenie pomocou PLC regulátora. Okrem toho spoločnosť Faulhaber ponúka regulátory pohybu špeciálne pre prácu s lineárnymi motormi, čo umožňuje plnú konfiguráciu a konfiguráciu lineárneho pohonu. Sú voľne programovateľné a podporujú sériové rozhranie RS-232 a sieťové rozhranie CAN.
Lineárne servomotory nevyžadujú mazanie ani žiadnu dodatočnú údržbu počas prevádzky, sú tiché, dosahujú rýchlosť až 3,2 m / s a zrýchlenie až 198 m / s2. Lineárne motory Faulhaber sú ponúkané s rôznymi dĺžkami drieku. Verzie sú k dispozícii pre prácu s kompaktnými regulátormi výrobcu, ako aj s sinusovo-kosínusovou spätnou väzbou, čo umožňuje riadenie pomocou PLC regulátora. Okrem toho spoločnosť Faulhaber ponúka regulátory pohybu špeciálne pre prácu s lineárnymi motormi, čo umožňuje plnú konfiguráciu a konfiguráciu lineárneho pohonu. Sú voľne programovateľné a podporujú sériové rozhranie RS-232 a sieťové rozhranie CAN.
4. Lineárny servomotor Dunkermotoren
Lineárne servomotory Dunkermotoren ServoTube sú k dispozícii v dvoch verziách:
1. Motory s priamym pohonom určené na vykonávanie prác v režime pohonu (pohyblivá tyč motora).
2. Komponenty lineárnych servo systémov navrhnutých na použitie ako komponenty OEM a vyžadujúce inštaláciu dodatočných ložísk. Pomocou takýchto komponentov je možné realizovať prácu motora so záťažou aplikovanou priamo na vozík s pevným driekom.
 Motor obsahuje integrovaný snímač spätnej väzby, ktorý poskytuje opakovateľnosť až 12 mikrónov. Lineárne servomotory Dunkermotoren integrujú lineárne ložiská, aby sa zaistila dlhá životnosť výrobku a žiadne dodatočné mazanie alebo iná údržba. Rad lineárnych servomotorov ServoTube sa môže pochváliť rozsahom vyvinutých rýchlostí až 9,4 m / sa zrýchlením až 586 m / s2. Servopohony sa vyznačujú triedou krytia IP67 a vyvíjajú konštantnú pracovnú silu od 7 do 276 N pri dlhodobom zaťažení. Všetky motory sú v súlade s priemyselnými normami, čo umožňuje ich rýchle uvedenie do už fungujúcich systémov. Na integráciu lineárnych servopohonov na výmenu pneumatických valcov sa ponúka veľké množstvo príslušenstva. Pre kompletnú súpravu s motormi sú tiež k dispozícii rôzne regulátory od výrobcu motora.
Motor obsahuje integrovaný snímač spätnej väzby, ktorý poskytuje opakovateľnosť až 12 mikrónov. Lineárne servomotory Dunkermotoren integrujú lineárne ložiská, aby sa zaistila dlhá životnosť výrobku a žiadne dodatočné mazanie alebo iná údržba. Rad lineárnych servomotorov ServoTube sa môže pochváliť rozsahom vyvinutých rýchlostí až 9,4 m / sa zrýchlením až 586 m / s2. Servopohony sa vyznačujú triedou krytia IP67 a vyvíjajú konštantnú pracovnú silu od 7 do 276 N pri dlhodobom zaťažení. Všetky motory sú v súlade s priemyselnými normami, čo umožňuje ich rýchle uvedenie do už fungujúcich systémov. Na integráciu lineárnych servopohonov na výmenu pneumatických valcov sa ponúka veľké množstvo príslušenstva. Pre kompletnú súpravu s motormi sú tiež k dispozícii rôzne regulátory od výrobcu motora.
4.1. Špeciálna verzia zabezpečených lineárnych servomotorov
Špeciálnou sériou servomotorov Dunkermotoren sú mechatronické výrobky, ktoré pracujú v režime pohonu.
Motory tejto série sa vyznačujú puzdrom z nehrdzavejúcej ocele a vyznačujú sa triedou ochrany IP69K. Vodné chladenie motorov tejto série vám umožní vyvinúť silu až 460 N. Do motora je integrovaný snímač s rozlíšením 10 μm, čo zaisťuje opakovateľnosť 25 μm. režim pohonu (pohyblivá tyč). Motor je napájaný z troch fáz, napájacie napätie môže dosiahnuť 600 V. Vďaka tomu je možné použiť ako riadiacu elektroniku, ktorú ponúka Dunkermotoren, tak regulátory od iných výrobcov.
4.2. Moduly lineárneho pohybu
 Moduly lineárneho pohybu Dunkermotoren sú pripravené na použitie a integrované do mechatronických riešení vytvorených systémami. Modul je založený na lineárnom servomotore Dunkermotoren, ktorý je vybavený vedením, koncovými spínačmi, reťazovou slučkou a ďalšími súvisiacimi komponentmi. Modul môže byť voliteľne vybavený lineárnym snímačom s rozlíšením až 1 μm na riešenie problémov s polohovaním s vysokou presnosťou.
Moduly lineárneho pohybu Dunkermotoren sú pripravené na použitie a integrované do mechatronických riešení vytvorených systémami. Modul je založený na lineárnom servomotore Dunkermotoren, ktorý je vybavený vedením, koncovými spínačmi, reťazovou slučkou a ďalšími súvisiacimi komponentmi. Modul môže byť voliteľne vybavený lineárnym snímačom s rozlíšením až 1 μm na riešenie problémov s polohovaním s vysokou presnosťou.
Modul lineárneho pohybu môže mať od 1 do 3 stupňov mobility, vždy je dokončený individuálne podľa zákazníckeho TZ. Použitie modulov lineárneho pohybu založených na lineárnych servomotoroch je dobrou alternatívou ku pohonom guľových skrutiek a remeňov. Moduly Dunkermotoren sú široko používané v baliacich strojoch a iných automatických linkách.
Ilya Gerasimov, inžinier spoločnosti Microdrive LLC
Fotografie spoločnosti LLC "Microdrive"
reklama
Elektrický pohon
23.10.2017 Vertikálne osi predstavujú určité riziká, najmä pri práci priamo pod nimi je nevyhnutné. Preto je potrebné zabezpečiť spoľahlivú ochranu v obrábacích strojoch.
Katolitsky Nikita Alexandrovič
Študent, Fakulta elektrickej energie, Štátna agrárna univerzita Stavropol, Stavropol, Rusko
Anotácia: Článok popisuje zariadenie, typy lineárnych motorov, ich rozdiely oproti iným typom elektromotorov, detailne popisuje použitie, výhody a nevýhody. Cieľom článku je opísať výhody lineárnych motorov nad ostatnými.
Kľúčové slová: Lineárny elektromotor, rotor, stator, pohon, kotva, magnetické jadro
Katolickij Nikita Aleksandrovich
Študent Elektrické oddelenie Stavropol Štátna agrárna univerzita Stavropol, Rusko
Podrobne je opísaný v zariadení. Účelom tohto článku je opísať použitie lineárnych motorov nad inými.
Kľúčové slová: lineárny elektromotor, motor, rotor, stator, pohon, kotva, magnetický vodič
Po mnoho rokov, priemysel závisel na rôznych pásových a skrutkových prevodovkách, ako aj na pneumatických mechanizmoch potrebných na vykonávanie lineárneho polohovania. Dopyt po vysokorýchlostnej šírke pásma, viacerých pracovných cykloch, flexibilnej konfigurácii a programovaní umožnil identifikovať nedostatky v týchto zariadeniach. Pri presnom, riadenom polohovaní v pohybe vpred musíte často robiť kompromisy.
Vďaka technológii priameho pohonu s priamym pohonom sa dosiahli vysoko kvalitné riešenia problémov s lineárnym polohovaním. Táto technológia zahŕňa priame použitie sily elektromagnetickej interakcie bez použitia remeňa, prevodu guľôčkovej skrutky alebo medziľahlého článku iného druhu. Lineárny pohon poskytuje priamy lineárny pohyb (nedochádza k premene rotačného pohybu na translačný).
Obrázok 1 - Zariadenie lineárneho motora
Elektrický lineárny motor je mechanizmus, v ktorom sa pohyblivá časť neotáča (v tradičných variantoch motora sa pohyblivá časť otáča), ale lineárne sa pohybuje pozdĺž pevnej časti jednotky, predstavovanej ako otvorený magnetický obvod, ktorého dĺžka má ľubovoľnú hodnotu. Vo vnútri magnetického obvodu sa vytvára prúdiace magnetické pole. V štandardných elektromotoroch sú rotátor a stator navinuté vo forme krúžkov a v lineárnom motore sú tieto prvky natiahnuté do pásov. Vzhľadom k tomu, že sa vinutie statora striedavo zapína, vytvára sa magnetické pole. Lineárny jednosmerný elektromotor obsahuje kotvu s vinutím umiestneným na jeho povrchu, ktorým je kolektor (vodiaci prvok) a otvorený magnetický obvod s budiacimi vinutiami (pohyblivou časťou) usporiadanými tak, že vektory síl vyskytujúcich sa v magnetických póloch majú jeden smer , Jednoduchosť ovládania rýchlosti pohybu pohyblivej časti je charakteristickým znakom lineárneho elektromotora. agregáty striedavý prúd môže byť synchrónny a asynchrónny. Kotva v asynchrónnom lineárnom elektrickom motore je vyrobená vo forme tyče, najčastejšie pravouhlého prierezu, v ktorej nie je navíjanie. Inštalácia kotvy sa vykonáva pozdĺž dráhy pohybu pohyblivej časti jednotky, vybavenej magnetickým jadrom s rozloženými viacfázovými vinutiami, ktoré sú napájané zo zdroja striedavého prúdu. V dôsledku interakcie magnetického poľa magnetického obvodu pohyblivej časti a poľa kotvy sa objavujú sily, ktoré spôsobujú, že sa pohyblivá časť pohybuje rýchlejšie vzhľadom na pevnú kotvu. Proces prebieha pred rovnicou rýchlosti pohyblivej časti a pohyblivého magnetického poľa.
Tieto jednotky sa najčastejšie používajú v oblasti elektrickej dopravy. To uľahčujú osobitné výhody motorov tohto typu:
Priamy pohyb statora je vynikajúci pre mnohé vozidlá;
Jednoduchá konštrukcia, v ktorej nie sú žiadne prvky trenia, to znamená tok energie vo vnútri magnetického poľa, sa priamo premieňa na mechanickú energiu. Vďaka tomu sa dosahuje vysoká účinnosť a spoľahlivosť jednotky;
Nezávislosť trakčnej sily od spojky dvojkolesia železničných tratí. Táto vlastnosť je nedostupná pre štandardné elektrické hnacie vozidlá;
Nedostatok pravdepodobnosti ťahania kolies elektrických vozidiel, čo bolo dôvodom pre výber lineárneho motora;
Zrýchlenie a rýchlosť prepravy môže mať akúkoľvek hodnotu, obmedzenú komfortom pohybu, prípustnou rýchlosťou valenia kolies na koľaji a cestách, ako aj stupňom dynamickej stability podvozku a koľaje vozidla.
Asynchrónne lineárne motory sú potrebné na riadenie dopravných mechanizmov rôznych výrobkov. Tieto dopravníky sú vybavené kovovými pásmi bežiacimi vnútri statorov lineárnych pohonných systémov, ktoré plnia funkciu sekundárneho prvku. Použitím lineárneho motorového systému sa zníži stupeň predpätia pásu, eliminuje sa pravdepodobnosť jeho preklzávania a zvýši sa aj rýchlosť a spoľahlivosť dopravníka.
Lineárne motory používajú perkusné stroje, napríklad kladivá na pilóty, ktoré sú potrebné v oblasti cestných prác a stavieb. Stator lineárneho hnacieho systému je umiestnený na ramene kladiva a jeho pohyb pozdĺž vodiacich prvkov ramena vo vertikálnom smere je zabezpečený navijakom. Kladivo kladiva vykonáva funkciu sekundárneho prvku hnacieho systému. Pri zdvíhaní kladivovej časti kladiva sa motor zapne, aby jazdné pole smerovalo nahor. Keď nárazové teleso dosiahne svoju najvyššiu hornú polohu, motor sa deaktivuje a nárazové teleso sa vplyvom gravitácie posunie smerom k povrchu vlasu. Niekedy nedôjde k deaktivácii motora - pohonný systém pracuje v opačnom režime, čím sa zvyšuje nárazová sila. V súlade so stupňom prehĺbenia vlasu sa stator pohonného systému pohybuje smerom dole v dôsledku navijaku. Konštrukcia elektrického kladiva je pomerne jednoduchá. Je to celkom jednoduché. Zvýšená presnosť pri výrobe jeho prvkov sa nevyžaduje a jeho dizajn nie je citlivý na zmeny v teplotných ukazovateľoch, pretože zariadenie môže okamžite začať vykonávať svoje funkcie.
Magnetohydrodynamické čerpadlá sú považované za jeden z typov lineárnych motorických systémov. Tieto zariadenia sa používajú na čerpanie elektricky vodivých kvapalín. Takéto čerpadlá sú široko používané: v metalurgii na vykonávanie prepravy, dávkovania, ako aj prenosu kovu v kvapalnej forme a v jadrových elektrárňach na vykonávanie prenosu kvapalných kovových chladív.
Magnetohydrodynamické čerpadlá majú dva typy: priamy a striedavý prúd. V prvom prípade elektromagnet tvaru C pôsobí ako primárny prvok (stator). Vo vzduchovej medzere elektrického magnetu namontujte potrubie s tekutým kovom. Vďaka elektródam navareným na steny potrubia sa preskočí jednosmerný prúd z externého zdroja. Vo väčšine prípadov budiace vinutie vstupuje do série elektród. Keď je elektrický magnet excitovaný, kov umiestnený v oblastiach, cez ktoré prechádza jednosmerný prúd, je vystavený elektromagnetickej sile, rovnako ako sila pôsobiaca na vodič s prúdom umiestneným v zóne magnetického poľa. V dôsledku účinku tejto sily sa kov pohybuje potrubím. Kľúčové rozdiely medzi MHD čerpadlami sú neprítomnosť pohyblivých mechanických prvkov, ako aj možnosť utesnenia kovového dopravného kanála.
Výhody lineárnych motorických systémov zahŕňajú neprítomnosť rotujúcich prvkov. Nevýhody zahŕňajú nízkoenergetické indikátory v porovnaní so štandardnými modelmi elektrických pohonov, čo je vysvetlené otvoreným elektromagnetickým obvodom a značnými pracovnými medzerami. Okrem toho, nevýhodami sú zložitosť a vysoké výrobné náklady. Systémy lineárnych motorov sa používajú pre vlaky, vysokorýchlostnú pozemnú dopravu patriacu do skupiny levitujúcich vozidiel. Všeobecné ukazovatele účinnosti štandardnej jednotky a lineárneho elektromotora, v prípade jeho optimalizácie, sú takmer rovnaké v prípadoch, keď sú vylúčené medziľahlé články prenosu hnacej sily. Postupom času lineárne elektromotory nahradia tradičné pohony s prevodmi.
Referencie:
Princíp činnosti lineárnych piezoelektrických motorov, ktorý robí relatívne veľký vratný pohyb (niekoľko milimetrov alebo centimetrov), sa nelíši od princípu činnosti rotujúcich motorov. Na obr. 6.4 a znázorňuje konštrukčný diagram lineárneho motora s vibrátorom, ktorý vytvára pozdĺžne (P) a ohybové (I) oscilácie. Stacionárny vibrátor 1 je pritlačený silou F na pohyblivú časť 3 pomocou tesnení 2 odolných proti opotrebeniu. Pohyblivá časť je oceľový polohovací člen 3 pohybujúci sa na valcoch 4. Ak sú fázy pozdĺžnych a ohybových vibrácií koordinované tak, že keď je vibrátor vysunutý, je stlačený do polohovacieho zariadenia vľavo. Tesnenie sa potom posúvač posunie doľava. Keď je vibrátor skrátený, je pritlačený proti polohovaču cez pravé tesnenie a polohovač pokračuje v pohybe doľava. Zmena pozdĺžnej fázy kmitania o 180 ° spôsobí, že sa regulátor polohy vráti. Pre lineárne piezomotory vyššie uvedených konštrukcií nepresiahne rozlíšenie posunu 1–10 µm.
Obrázok 6.4
V niektorých presných technologických zariadeniach, ktoré sa používajú napríklad pri výrobe integrovaných obvodov, vo vojenských mini- a mikrorobotoch sú potrebné ovládače, ktoré sa pohybujú na desatiny alebo stotiny mikrometrov. Ako také ovládače pracujú bez mechanických prevodníkov, lineárnych piezoelektrických mikromórov s menič s riadeným napätím, V týchto motoroch (obr. 6.4, b) sa prevádzkový pohyb vykonáva tyčou samotnou piezoelektrického prvku 2, ktorá sa zvyčajne uskutočňuje vo forme kolóny piezokeramických podložiek zlepených dohromady. Svorky 1 a 3 sú umiestnené na koncoch tyče, ak svorku 1 upevníte a na elektródy piezoelektrického prvku, ktorý vedie k predĺženiu piezoelektrickej tyče, sa privádza konštantné napätie, koniec tyče so svorkou 3 sa pohybuje doprava. Posun bude závisieť od použitého napätia. Pri použití keramiky s predĺžením (5-7) * 10 -4 môže tyč s dĺžkou 50 mm poskytnúť výtlak až 25 mikrónov.
Na tom istom princípe môžu byť lineárne krokové motory konštruované aj s krokom v zlomkoch mikrometrov. Potom, čo sa pravý koniec tyče (obr. 6.4, b) presunie do špecifikovaného kroku, svorka 3 je fixovaná, svorka 1 sa uvoľní a napätie sa odstráni z piezoelektrického prvku. Tyč je stlačená na pôvodnú dĺžku a jej ľavý koniec je ťahaný doprava. Potom sa svorka 1 znova upevní, svorka 3 sa uvoľní a na piezoelektrický prvok sa privedie napätie. V dôsledku toho dochádza k krokovému pohybu motora a príslušného riadiaceho objektu do požadovanej vzdialenosti. Frekvencia krokov je 30-50 Hz. Veľmi zložitým uzlom takéhoto krokového motora je zariadenie na upevnenie svoriek v každom kroku.
Na záver Treba poznamenať hlavné výhody a nevýhody rotujúcich a lineárnych piezomotorov. Najdôležitejšie výhody piezomotorov, najmä ak sa používajú v robotických a počítačových zariadeniach, sú nasledovné:
1. Rozlíšenie vysokého výtlaku: do 1–10 µm v režime oscilačného snímača a do 0,01 µm - s použitím riadených deformácií snímačov.
2. Vysoká rýchlosť: čas zrýchlenia a spomalenia je niekoľko milisekúnd.
3. Piezoelektrické motory majú pri odstraňovaní napájacieho napätia v dôsledku trecích síl významnú samo-brzdnú silu.
4. Rozsah regulácie otáčok piezomotorov dosahuje 10 6.
Piezo motory sú dobre integrované (integrované) do zložitých mechanických komponentov a používajú sa v pohonoch na čítanie a zápis informácií pre počítače, magnetofóny, videorekordéry a kamery. Použitie lineárnych piezomotorov na umiestnenie čítacej hlavy umožňuje zvýšiť hustotu záznamu na magnetických diskoch faktorom 2-3.
Možnosť získania z piezoelektrických servopohonov do 5 stupňov voľnosti s minimálnym uhlovým a lineárnym posunom článkov určuje možnosť ich širokého uplatnenia v presných automatizačných a riadiacich systémoch. Napríklad v astronómii, v kozmickom výskume - kde sa vyžaduje presná orientácia pre veľmi malé objekty; v urýchľovačoch nabitých častíc, kde je potrebné udržať zväzok častíc v presne vymedzených geometrických súradniciach; v kryštalografických štúdiách.
Použitie piezomotorov v akčných členoch je však spojené s radom ťažkostí. Podstatná závislosť rezonančnej frekvencie meniča na napájacom napätí elektród, moment zaťaženia a moment zotrvačnosti na hriadeli motora sťažujú zabezpečenie optimálnej premeny energie. Vlastnosti riadenia motora sú nelineárne, parabolické; existuje pomerne široké pásmo. Mechanické vlastnosti sú pomerne mäkké a majú vzhľad hyperboly.
Kompenzáciu týchto nedostatkov možno dosiahnuť vykonaním ovládača s spätnou väzbou rýchlosti. Spätná väzba môže byť realizovaná buď priamo pomocou tachometrov typu rýchlosti, alebo nepriamo, na základe skutočnosti, že uhlová rýchlosť rotora je úmerná aktívnemu výkonu spotrebovanému elektronickým meničom. Zároveň je potrebné použiť špeciálne metódy riadenia vysokofrekvenčných výkonových zdrojov piezoelektrických prvkov, ktoré so značnou nelinearitou charakteristík piezoelektrických prevodníkov a nelinearitou mechanických a nastavovacích charakteristík motorovej časti môžu zabezpečiť stabilnú prevádzku so silnými náhodnými poruchami. Na zabezpečenie požadovaných statických a dynamických charakteristík pri nastavovaní alebo stabilizácii rýchlosti sa v praxi uplatňujú tieto požiadavky: \\ t
Teoreticky, piezoelektrické motory môžu mať veľmi vysoké výkonové a energetické charakteristiky, pretože iba piezoelektrická keramika premieňa elektrickú energiu na mechanickú energiu s účinnosťou vyššou ako 90% v niektorých prípadoch. Strata výkonu vo zvyšku motora však vedie k tomu, že účinnosť reálnych mikromotorov s výkonom do 10 W nepresahuje 10 - 25%.
Sériová výroba a použitie piezomotorov je obmedzená zložitosťou výroby dobrých piezokeramických a odolných materiálov. V súčasnosti je s tým spojené obmedzenie výkonu piezomotorov približne 10 W. Rýchle opotrebovanie súčiastok v kontakte pri prenose pohybu obmedzuje životnosť motorov.
V bežných motoroch s vnútorným spaľovaním vyrábame počiatočné spoje - piesty. Potom sa tento pohyb pomocou kľukového mechanizmu transformuje na rotačný. V niektorých zariadeniach robia prvý a posledný odkaz jeden typ pohybu.
Napríklad v motorovom generátore nie je potrebné najprv premieňať vratný pohyb na rotačný a potom v generátore extrahovať z tohto rotačného pohybu priamočiary komponent, to znamená robiť dve opačné transformácie.
Moderný vývoj technológie elektronického konvertora umožňuje spotrebiteľovi prispôsobiť výstupné napätie lineárneho elektrického generátora, čo umožňuje vytvoriť zariadenie, v ktorom časť uzavretého elektrického obvodu nevykonáva rotačný pohyb v magnetickom poli, ale vratne spolu s ojnicou spaľovacieho motora. Diagramy vysvetľujúce princíp činnosti tradičného a lineárneho generátora sú znázornené na obr. 1.
V konvenčnom generátore sa na získanie napätia používa drôtový rám otáčajúci sa v magnetickom poli a poháňaný externým propulzorom. V navrhovanom generátore sa rám vodiča pohybuje lineárne v magnetickom poli. Tento malý a nepodstatný rozdiel umožňuje výrazne zjednodušiť a zlacniť pohon, ak používa spaľovací motor.
Tiež v piestovom kompresore poháňanom piestovým motorom vstupný a výstupný článok vykonáva obr. 2.
Malé rozmery a hmotnosť v dôsledku nedostatku kľukového mechanizmu. Vysoký čas medzi poruchami v dôsledku nedostatku kľukového mechanizmu a prítomnosti iba pozdĺžnych zaťažení. Nízka cena kvôli nedostatku kľukového mechanizmu. Vyrobiteľnosť - pre výrobu dielov sú potrebné len práce bez práce, sústruženie a frézovanie. Možnosť prepnutia na iný typ paliva bez zastavenia motora.
Bežný motor na dodávku elektrického napätia (prúdu) do zapaľovacej sviečky musí spĺňať dve podmienky:
Prvá podmienka je určená kinematikou kľukového mechanizmu - piest musí byť v hornej úvrati (bez zohľadnenia predstihu zapaľovania);
Druhá podmienka je určená termodynamickým cyklom - tlak v spaľovacej komore pred pracovným cyklom musí zodpovedať použitému palivu.
Zároveň je veľmi ťažké splniť dve podmienky. Pri stlačení vzduchu alebo pracovnej zmesi dochádza k úniku stlačiteľného plynu v spaľovacej komore cez piestové krúžky atď. Čím pomalšie nastáva kompresia (hriadeľ motora sa otáča pomalšie), tým vyšší je únik. V tomto prípade sa tlak v spaľovacej komore pred pracovným cyklom stane menším ako je optimálny a pracovný cyklus nastane pri neoptimálnych podmienkach. Účinnosť motora klesá. To znamená, že na zaistenie vysokej účinnosti motora je možné len v úzkom rozsahu otáčok výstupného hriadeľa.
Preto je napríklad účinnosť motora na stojane asi 40% a v reálnych podmienkach, na vozidle, za rôznych jazdných podmienok, klesne táto hodnota na 10 ... 12%.
V lineárnom motore nie je žiadny kľukový mechanizmus, preto prvá podmienka nemusí byť splnená, nezáleží na tom, kde sa piest nachádza pred pracovným cyklom, len tlak plynu v spaľovacej komore pred záležitosťami pracovného cyklu. Ak teda nie je napájanie elektrickým napätím (prúdom) zapaľovacej sviečky riadené polohou piestu, ale tlakom v spaľovacej komore, potom pracovný cyklus (zapaľovanie) vždy začne pri optimálnom tlaku, bez ohľadu na frekvenciu motora, obr. 3.
Takže v každom režime prevádzky lineárneho motora budeme mať maximálnu slučkovú oblasť s termodynamickým cyklom Carnot, resp. S vysokou účinnosťou pri rôznych prevádzkových režimoch motora.
Riadenie zapaľovania pomocou tlaku v spaľovacej komore tiež poskytuje možnosť bezbolestného prepnutia na iné typy palív. Napríklad pri prechode z vysokooktánového typu paliva na nízkooktánový typ v lineárnom motore stačí zadať príkaz zapaľovaciemu systému, takže prívod elektrického napätia (prúdu) do zapaľovacej sviečky nastane pri nižšom tlaku. V bežnom motore by to vyžadovalo zmenu geometrických rozmerov piestu alebo valca.
Kontrola zapálenia tlaku vo valci môže byť realizovaná piezoelektrickou alebo kapacitnou metódou merania tlaku.
Snímač tlaku je vytvorený vo forme podložky, ktorá je umiestnená pod maticou upevňovacieho kolíka hlavy valca, obr. 3. Sila tlaku plynu v kompresnej komore pôsobí na snímač tlaku, ktorý je umiestnený pod maticou, ktorá zaisťuje hlavu valca. Informácie o tlaku v kompresnej komore sa prenášajú na riadiacu jednotku momentu zapálenia. Pri tlaku v komore, ktorý zodpovedá zapaľovaciemu tlaku daného paliva, zapaľovací systém dodáva elektrickému napätiu (prúdu) zapaľovacej sviečke. S prudkým nárastom tlaku, ktorý zodpovedá začiatku pracovného cyklu, zapaľovací systém odľahčuje elektrické napätie (prúd). Pri neprítomnosti zvýšenia tlaku po vopred stanovenom čase, ktorý zodpovedá absencii začiatku pracovného cyklu, systém zapaľovania dodáva riadiaci signál na spustenie motora. Na určenie frekvencie motora a jeho diagnózy (definícia kompresie atď.) Sa používa aj výstupný signál snímača tlaku vo valci.
Sila kompresie je priamo úmerná tlaku v spaľovacej komore. Po tom, čo tlak v každom z protiľahlých valcov nie je menší ako požadovaná hodnota (v závislosti od typu použitého paliva), riadiaci systém vydá príkaz na zapálenie horľavej zmesi. Ak je potrebné prepnúť na iný typ paliva, zmení sa hodnota špecifikovaného (referenčného) tlaku.
Nastavenie momentu zapálenia horľavej zmesi môže byť tiež uskutočnené v automatickom režime, ako je to v bežnom motore. Na valec je umiestnený snímač mikrofónu - klepanie. Mikrofón premieňa mechanické zvukové vibrácie tela valca na elektrický signál. Digitálny filter, z tohto súboru sínusových napäťových súčtov, extrahuje harmonickú (sínusovú vlnu) zodpovedajúcu detonačnému režimu. Keď sa na výstupe filtra objaví signál na zodpovedajúcu detonáciu v motore, riadiaci systém znižuje hodnotu referenčného signálu, ktorý zodpovedá zapaľovaciemu tlaku horľavej zmesi. V prípade neprítomnosti signálu zodpovedajúceho detonácii zvyšuje riadiaci systém po určitom čase veľkosť referenčného signálu, ktorá zodpovedá zapaľovaciemu tlaku horľavej zmesi, až kým sa neobjavia frekvencie predchádzajúce detonácii. Opäť platí, že pri výskyte frekvencií, ktoré predchádzajú detonácii, systém znižuje referenčný signál, ktorý zodpovedá poklesu vznietiaceho tlaku, na bezplameňové zapálenie. Systém zapaľovania sa teda prispôsobuje typu použitého paliva.
Princíp činnosti lineárneho, ako aj konvenčného spaľovacieho motora je založený na účinku tepelnej rozťažnosti plynov vznikajúcich pri spaľovaní zmesi paliva a vzduchu a zaisťovaní pohybu piestu vo valci. Ojnica prenáša priamočiary vratný pohyb piesta na lineárny elektrický generátor alebo piestový kompresor.
Obr. 4, pozostáva z dvoch párov piestov pracujúcich v protifáze, čo umožňuje vyváženie motora. Každá dvojica piestov je spojená ojnicou. Ojnica je zavesená na lineárnych ložiskách a spolu s piestami môže voľne kmitať v skrini generátora. Piesty sú umiestnené vo valcoch spaľovacieho motora. Cylindre sa prepláchnu cez preplachovacie otvory, pôsobením mierneho pretlaku vytvoreného v pred-vstupnej komore. Na ojnici je pohyblivá časť magnetického obvodu generátora. Budiace vinutie vytvára magnetický tok potrebný na generovanie elektrický prúd, Počas vratného pohybu spojovacej tyče a s ňou časťou magnetického obvodu magnetické indukčné vedenie vytvorené budiacim vinutím pretína stacionárne elektrické vinutie generátora, indukujúce v ňom elektrické napätie a prúd (s uzavretým elektrickým obvodom).
|
|
| Obr. 4. |
Lineárny kompresor, obr. 5, pozostáva z dvoch párov piestov pracujúcich v protifáze, čo umožňuje vyváženie motora. Každá dvojica piestov je spojená ojnicou. Ojnica je zavesená na lineárnych ložiskách a môže voľne kmitať s piestami v skrini. Piesty sú umiestnené vo valcoch spaľovacieho motora. Cylindre sa prepláchnu cez preplachovacie otvory, pôsobením mierneho pretlaku vytvoreného v pred-vstupnej komore. Pri vratnom pohybe ojnice a s ňou sa do kompresorového kompresora privádza stlačený vzduch.
|
|
| Obr. 5. Lineárny kompresor. |
Pracovný cyklus v motore sa vykonáva v dvoch cykloch.
2. Zdvih zdvihu. Keď je piest umiestnený v blízkosti horného úvratu, stlačená pracovná zmes je zapálená elektrickou iskrou zo zapaľovacej sviečky, v dôsledku čoho prudko stúpa teplota a tlak plynov. Pri pôsobení tepelnej rozťažnosti plynov sa piest pohybuje do spodného mŕtveho bodu, zatiaľ čo expandujúce plyny robia užitočnú prácu. Piest zároveň vytvára vysoký tlak vo vstupnej komore. Pod tlakom sa ventil zatvorí, čím sa zabráni vniknutiu vzduchu do sacieho potrubia.
Pri pracovnom zdvihu vo valci, obr. 6 pracovný zdvih, piest pôsobením tlaku v spaľovacej komore, sa pohybuje v smere označenom šípkou. Pri pôsobení pretlaku v predkomore sa ventil uzavrie a vzduch sa stlačí na vetranie valca. Keď piest (kompresné krúžky) dosiahne čistiace otvory, obr. 6 ventilácia, tlak v spaľovacej komore prudko klesá a potom sa piest so spojovacou tyčou pohybuje zotrvačnosťou, to znamená, že hmotnosť pohyblivej časti generátora hrá úlohu zotrvačníka v bežnom motore. Okná preplachovania a stlačený vzduch v pred-vstupnej komore sa súčasne úplne otvoria pôsobením tlakového rozdielu (tlak v predradenej komore a atmosférický tlak), ktorý prechádza cez valec. Ďalej sa počas pracovného cyklu v protiľahlom valci vykonáva kompresný cyklus.
Keď sa piest pohybuje v kompresnom režime, obr. 6, piest uzatvára preplachovacie otvory, vykonáva sa vstrekovanie kvapalného paliva, v tomto okamihu je vzduch v spaľovacej komore pod miernym pretlakom začiatku kompresného cyklu. Pri ďalšom stlačení, akonáhle sa tlak stlačiteľnej horľavej zmesi rovná referenčnému tlaku (špecifikovanému pre tento typ paliva), na elektródy zapaľovacej sviečky sa aplikuje elektrické napätie, zmes sa zapáli, začne pracovný cyklus a proces sa bude opakovať. V tomto prípade je spaľovacím motorom iba dva koaxiálne a opačne umiestnené valce a piesty, ktoré sú mechanicky prepojené.
Pohon palivového čerpadla lineárneho elektrického generátora je vačkový povrch vložený medzi piestový valec čerpadla a valec skrine čerpadla, obr. 7. Vačkový povrch sa vratne pohybuje spolu s ojnicou motora s vnútorným spaľovaním a tlačí pri každom zdvihu valce piestu a čerpadla, zatiaľ čo piest čerpadla sa vzhľadom na valec čerpadla pohybuje a palivová časť sa na začiatku kompresného cyklu vypúšťa do vstrekovacej dýzy paliva. Ak je potrebné zmeniť množstvo paliva vyhodeného počas jedného zdvihu, povrch vačky sa otáča vzhľadom na pozdĺžnu os. Keď sa povrch vačky otáča vzhľadom na pozdĺžnu os, valce piestu čerpadla a valce puzdra čerpadla sa budú pohybovať od seba alebo sa pohybovať (v závislosti od smeru otáčania) v rôznych vzdialenostiach, zdvih piestu palivového čerpadla sa zmení a časť pohonného paliva sa zmení. Otáčanie vratnej pohyblivej vačky okolo jej osi sa uskutočňuje pomocou pevného hriadeľa, ktorý je v zábere s vačkou pomocou lineárneho ložiska. Vačka sa teda pohybuje tam a späť a hriadeľ zostáva nepohyblivý. Keď sa hriadeľ otáča okolo svojej osi, povrch vačky sa otáča okolo svojej osi a zmení sa zdvih palivového čerpadla. Hriadeľ mení časť vstrekovania paliva, je poháňaný krokovým motorom alebo ručne.
Pohon palivového čerpadla lineárneho kompresora je tiež vačkový povrch upnutý medzi rovinou piestu čerpadla a rovinou puzdra čerpadla, obr. 8. Vačkový povrch vykonáva vratný rotačný pohyb spolu s hriadeľom motora s vnútorným spaľovaním a tlačí piest a roviny čerpadla pri každom zdvihu, zatiaľ čo piest čerpadla sa pohybuje vzhľadom na valec čerpadla a časť paliva sa vypúšťa do vstrekovacej dýzy paliva na začiatku kompresného cyklu. , Pri prevádzke lineárneho kompresora nie je potrebné meniť množstvo vytlačeného paliva. Prevádzka lineárneho kompresora je myslená len v spojení s prijímačom - zariadením na akumulovanie energie, ktoré môže vyhladiť vrcholy maximálneho zaťaženia. Preto sa odporúča výstup lineárneho kompresorového motora iba v dvoch režimoch: optimálny režim zaťaženia a režim voľnobehu. Prepínanie medzi týmito dvoma režimami sa vykonáva pomocou elektromagnetických ventilov, riadiaceho systému.
Štartovací systém lineárneho motora sa vykonáva rovnako ako pri bežnom motore pomocou elektrického pohonu a zásobníka energie. Začiatok bežného motora sa uskutočňuje pomocou štartéra (elektrický pohon) a zotrvačníka (uskladnenie energie). Lineárny motor sa spúšťa pomocou lineárneho elektrokompresora a štartovacieho prijímača, obr. 9.
|
|
| Obr. 9. Štartovací systém. |
Pri štartovaní sa piest štartovacieho kompresora, keď je pod napätím, postupne pohybuje v dôsledku elektromagnetického poľa vinutia a potom sa pomocou pružiny vracia do svojho pôvodného stavu. Po prečerpaní prijímača do atmosféry 8 ... 12 sa energia odstráni zo svoriek štartovacieho kompresora a motor je pripravený na štart. Uvedenie do prevádzky sa vykonáva privádzaním stlačeného vzduchu do predradených komôr lineárneho motora. Prívod vzduchu sa vykonáva pomocou elektromagnetických ventilov, ktorých činnosť je riadená riadiacim systémom. Pretože riadiaci systém nemá žiadnu informáciu, v ktorej polohe sú umiestnené motorové spojovacie tyče, pred spustením sa vysokotlakový vzduch privádza do pred vstrekovacích komôr, napríklad do extrémnych valcov, pričom sa zaručí, že piesty sa vrátia do pôvodného stavu pred naštartovaním motora. Potom sa do predkomory stredných valcov privádza vysoký tlak vzduchu, takže sa fľaše pred spustením ventilujú. Potom sa znovu privádza vysokotlakový vzduch do vstupných komôr vonkajších valcov na naštartovanie motora. Akonáhle začne prevádzkový cyklus (snímač tlaku bude signalizovať vysoký tlak v spaľovacej komore, ktorý zodpovedá prevádzkovému cyklu), riadiaci systém pomocou elektromagnetických ventilov zastaví prúdenie vzduchu zo štartovacieho prijímača.
Synchronizácia práce spojovacích tyčí lineárneho motora sa vykonáva pomocou synchronizačného ozubeného kolesa a dvojice ozubených tyčí, obr. 10, pripojené k pohyblivej časti magnetického obvodu generátorových alebo kompresorových piestov. Ozubené koleso je tiež pohonom olejového čerpadla, ktoré sa používa na vynútenie mazania častí trenia lineárneho motora.
Generátor lineárneho benzínového generátora je synchrónny elektrický stroj. V konvenčnom generátore rotor vytvára rotačný pohyb a hmotnosť pohyblivej časti magnetického obvodu nie je kritická. V lineárnom generátore pohyblivá časť magnetického obvodu uskutočňuje vratný pohyb spolu s ojnicou spaľovacieho motora a vysoká hmotnosť pohyblivej časti magnetického obvodu znemožňuje prevádzku generátora. Je potrebné nájsť spôsob, ako znížiť hmotnosť pohyblivej časti magnetického obvodu generátora.
|
|
| Obr. 11. Generátor. |
Aby sa znížila hmotnosť pohyblivej časti magnetického obvodu, je potrebné znížiť jeho geometrické rozmery, resp. Objem a hmotnosť sa znížia, obr. 11. Ale potom magnetický tok pretína iba vinutie v jednom páre okien namiesto piatich, je to ekvivalentné, že magnetický tok pretína vodič päťkrát kratší, resp. a výstupné napätie (výkon) klesá 5-krát. Na kompenzáciu poklesu napätia generátora je potrebné pridať počet otáčok v jednom okne tak, aby dĺžka vodiča vinutia bola rovnaká ako v pôvodnej verzii generátora, obr.
Aby však mohol väčší počet závitov ležať v okne s nezmenenými geometrickými rozmermi, je potrebné znížiť prierez vodiča.
Pri konštantnom zaťažení a výstupnom napätí sa tepelné zaťaženie takého vodiča v tomto prípade zvýši a stane sa optimálnym (prúd zostáva rovnaký a prierez vodičov sa takmer päťkrát znížil). To by nastalo v prípade, ak sú vinutia okien spojené sériovo, to znamená, keď prúd zaťaženia prúdi cez všetky vinutia súčasne, ako v bežnom generátore. Ale ak sa striedavo pripájame len vinutie dvojice okien k zaťaženiu, ktoré je v súčasnosti pretínané magnetickým tokom, potom toto vinutie nebude mať čas na prehriatie v takom krátkom časovom období, pretože tepelné procesy sú zotrvačné. To znamená, že je potrebné striedavo pripojiť k záťaži len tú časť vinutia generátora (dvojica pólov), ktorú magnetický tok pretína, zvyšok času by mal vychladnúť. Preto je zaťaženie vždy zapojené v sérii len s jedným vinutím generátora. V tomto prípade efektívna hodnota prúdu tečúceho vinutím generátora neprekročí optimálnu hodnotu z hľadiska ohrevu vodiča. Je teda možné podstatne viac ako 10-násobne znížiť hmotnosť nielen pohyblivej časti magnetického obvodu generátora, ale aj hmotnosť pevnej časti magnetického obvodu. Prepínanie vinutí pomocou elektronických kľúčov. Ako kľúče na striedavé pripojenie vinutí generátora k záťaži sa používajú polovodičové zariadenia - tyristory (triaky). Lineárny generátor je rozmiestnený obyčajný generátor, obr. 11. Napríklad pri frekvencii zodpovedajúcej 3000 cyklom / min a zdvihu ojnice 6 cm sa každé vinutie zahreje na 0,00083 sekúnd, čo je 12-násobok nominálnej hodnoty, zvyšok času bude takmer 0,01 sekundy, toto vinutie sa ochladí. Keď sa prevádzková frekvencia zníži, čas ohrevu sa zvýši, ale podľa toho sa zníži prúd, ktorý preteká vinutím a zaťažením. Triak je spínač (môže zatvoriť alebo otvoriť elektrický obvod). Zatváranie a otváranie nastáva automaticky. Počas prevádzky, akonáhle magnetický tok začne prechádzať vinutiami vinutia, objaví sa na koncoch vinutia indukované elektrické napätie, čo vedie k skratu elektrického obvodu (otvorenie triaku). Potom, keď magnetický tok prechádza cez cievky nasledujúceho vinutia, potom úbytok napätia na triakových elektródach otvára elektrický obvod. Takže v každom okamihu času je zaťaženie vždy zapnuté, v sérii, len s jedným vinutím generátora.
Na obr. 12 znázorňuje montážny výkres generátora bez budiaceho vinutia.
Väčšina častí lineárnych motorov je tvorená rotačnou plochou, to znamená, že majú valcové tvary. To umožňuje ich výrobu s použitím najlacnejšej a naj automatizovanejšej automatizácie otáčania.
|
|
| Obr. 12. Výkres zostavenia generátora. |
Matematický model lineárneho generátora je postavený na základe zákona o zachovaní energie a Newtonových zákonov: v každom okamihu času, pri t0 a t1, musí byť zabezpečená rovnosť síl pôsobiacich na piest. Po krátkom časovom intervale, pri pôsobení výslednej sily, sa piest posunie o určitú vzdialenosť. V tejto krátkej časti predpokladáme, že sa piest pohyboval rovnako zrýchlene. Hodnota všetkých síl sa zmení podľa zákonov fyziky a vypočíta sa podľa známych vzorcov.
[Príručka fyziky: Kuhling H. Trans. s ním. 2. vydanie. - M .: Mir, 1985. - 520 s., Il.]. Všetky údaje sa automaticky zaznamenávajú do tabuľky, napríklad do programu Excel. Potom je t0 priradené hodnoty t1 a cyklus sa opakuje. To znamená, že vykonávame logaritmickú operáciu.
Matematický model je tabuľka, napríklad v Exceli, a montážny výkres (náčrt) generátora. Náčrt neobsahuje lineárne rozmery, ale súradnice buniek tabuľky v programe Excel. Zodpovedajúce predpokladané lineárne rozmery sa zapíšu do tabuľky a program vypočíta a vykreslí pohyb piestu vo virtuálnom generátore. To znamená, že nahradením rozmerov: priemer piestu, objem predvýfukovej komory, zdvih piestu do okienok preplachovania atď. Získame grafy prejdenej vzdialenosti, rýchlosti a zrýchlenia pohybu piestu v čase. To umožňuje prakticky vypočítať stovky možností a vybrať ten najoptimálnejší.
Vrstva drôtu lineárneho generátorového okna, na rozdiel od bežného generátora, leží v jednej rovine skrútenej v špirále, preto je ľahšie navíjať vinutie drôty, ktoré nie sú kruhového prierezu, ale obdĺžnikové, to znamená, že vinutie je medená doska skrútená v špirále. Tým je možné zväčšiť plniaci faktor okna a výrazne zvýšiť mechanickú pevnosť vinutí. Treba poznamenať, že rýchlosť spojovacej tyče, a teda pohyblivá časť magnetického obvodu, nie je rovnaká. To znamená, že magnetické indukčné vedenia prechádzajú cez vinutie rôznych okien s rôznymi rýchlosťami. Na plné využitie vodičov vinutia musí počet otáčok každého okna zodpovedať rýchlosti magnetického toku v blízkosti tohto okna (rýchlosť spojovacej tyče). Počet závitov vinutí každého okna sa volí s prihliadnutím na závislosť rýchlosti spojovacej tyče na vzdialenosti, ktorú prejde ojnica.
Pre rovnomernejšie napätie generovaného prúdu je tiež možné navíjať vinutie každého okna medenou doskou rôznej hrúbky. V oblasti, kde rýchlosť spojovacej tyče nie je vysoká, sa vinutie uskutočňuje doskou menšej hrúbky. Väčší počet závitov vinutia zapadne do okna a pri nižšej rýchlosti spojovacej tyče v tejto oblasti generátor vytvorí napätie porovnateľné s napätím na častiach s „vyššou rýchlosťou“, hoci generovaný prúd bude oveľa nižší.
Hlavnou aplikáciou opísaného generátora je neprerušiteľný zdroj napájania v malých podnikoch, ktorý umožňuje dlhodobé pripojenie pripojeného zariadenia v prípade výpadku sieťového napätia, alebo keď jeho parametre presahujú prijateľné limity. Elektrické generátory môžu byť použité na poskytovanie elektrickej energie pre priemyselné a domáce elektrické zariadenia, v miestach, kde nie je elektrických sietía tiež ako pohonná jednotka pre vozidlo (hybridné vozidlo) ako mobilný generátor elektrickej energie. Napríklad generátor elektrickej energie vo forme diplomata (kufor, taška). Užívateľ so sebou vezme na miesta, kde nie sú žiadne elektrické siete (výstavba, kempovanie, vidiecky dom, atď.) V prípade potreby sa stlačením tlačidla „štart“ spustí generátor a zapne elektrické zariadenia, ktoré sú k nemu pripojené: elektrické náradie, domáce spotrebiče, To je spoločný zdroj elektrickej energie, len oveľa lacnejšie a ľahšie ako jeho analógy.
Použitie lineárnych motorov umožňuje vytvoriť lacný, ľahko ovládateľný a ľahko ovládateľný automobil.
Vozidlo s lineárnym elektrickým generátorom je dvojmiestne vozidlo (250 kg), obr. 13.
Pri riadení sa nevyžaduje prepínanie rýchlostí (dva pedále). Vzhľadom k tomu, že generátor môže dosiahnuť maximálny výkon, aj keď sa „pohybuje“ (na rozdiel od bežného vozidla), charakteristiky zrýchlenia, dokonca aj pri nízkych kapacitách trakčného motora, majú lepší výkon ako podobné vlastnosti konvenčných vozidiel. Účinok posilnenia volantu a systému ABS je dosiahnutý programovo, pretože všetky potrebné „hardware“ sú už k dispozícii (pohon pre každé koleso umožňuje regulovať krútiaci moment alebo brzdný moment kolesa, napríklad otáčaním volantu sa šíri krútiaci moment medzi pravým a ľavým volantom a kolesá sa otáčajú samy o sebe). vodič ich umožňuje len otočiť sa, tzn. bez námahy ovládať). Usporiadanie blokov umožňuje zostaviť vozidlo na žiadosť spotrebiteľa (generátor môžete ľahko vymeniť za výkonnejší v priebehu niekoľkých minút).
Je to obyčajné auto oveľa lacnejšie a ľahšie ako jeho analógy.
Vlastnosti - jednoduchá obsluha, nízke náklady, rýchla nastaviteľná rýchlosť, výkon do 12 kW, pohon všetkých kolies (terénne vozidlo).
Vozidlo s navrhovaným generátorom má vzhľadom na špecifický tvar generátora veľmi nízke ťažisko, preto bude mať vysokú jazdnú stabilitu. Také vozidlo bude mať veľmi vysoké charakteristiky zrýchlenia. V navrhovanom vozidle je možné využiť maximálny výkon pohonnej jednotky pri všetkých rýchlostiach. Rozdelená hmota pohonnej jednotky nezaťažuje karosériu, takže môže byť lacná, jednoduchá a jednoduchá.
Trakčný motor vozidla, v ktorom sa používa ako pohonná jednotka, musí spĺňať tieto podmienky: \\ t
Výkonové vinutia motora musia byť priamo, bez meniča, pripojené ku svorkám generátora (na zvýšenie účinnosti elektrického prenosu a zníženie ceny prúdového meniča);
Rýchlosť otáčania výstupného hriadeľa elektromotora by mala byť regulovaná v širokom rozsahu a nemala by závisieť od frekvencie prevádzky elektrického generátora;
Motor musí mať vysoký čas na poruchu, to znamená, že je v prevádzke spoľahlivý (nemá kolektor);
Motor by mal byť lacný (jednoduchý);
Motor musí mať vysoký krútiaci moment pri nízkych výstupných rýchlostiach;
Motor musí byť ľahký.
Schéma zapojenia vinutí takéhoto motora je znázornená na obr. 14. Zmenou polarity napájania rotorového vinutia získame krútiaci moment rotora.
Tiež zmenou veľkosti a polarity napájacieho zdroja na vinutie rotora sa zavádza rotačná rotácia rotora vzhľadom na magnetické pole statora. Riadenie prívodného prúdu vinutia rotora nastáva v rozsahu 0 ... 100%. Napájanie rotorového vinutia je asi 5% výkonu motora, takže nie je potrebné pre celý prúd trakčných motorov, ale len pre ich budiaci prúd. Výkon prúdového meniča, napríklad pre palubný elektrický generátor 12 kW, je len 600 W a tento výkon je rozdelený na štyri kanály (pre každé koleso trakčného motora vlastný kanál), to znamená, že výkon každého kanála meniča je 150 wattov. Nízka účinnosť konvertora preto nebude mať významný vplyv na účinnosť systému. Konvertor môže byť postavený pomocou nízkoenergetických, lacných polovodičových prvkov.
Prúd zo svoriek elektrického generátora bez akejkoľvek zmeny sa aplikuje na výkonové vinutia trakčných motorov. Konvertuje sa len budiaci prúd, takže je vždy v protifáze s prúdom výkonových vinutí. Pretože budiaci prúd je len 5 ... 6% celkového spotrebovaného prúdu trakčný motor, menič je potrebný pre výkon 5 ... 6% z celkového výkonu generátora, čo výrazne zníži cenu a váhu meniča a zvýši účinnosť systému. V tomto prípade musí menič budiaceho prúdu budiča trakčných motorov „vedieť“, v ktorej polohe je hriadeľ motora, aby priviedol prúd do vinutia poľa v každom časovom bode, aby sa vytvoril maximálny krútiaci moment. Snímač polohy výstupného hriadeľa trakčného motora je snímač absolútnej hodnoty.
Použitie lineárneho elektrického generátora ako pohonnej jednotky vozidla umožňuje vytvoriť rozloženie blokov vozidla. V prípade potreby môžete meniť veľké zostavy a agregáty v priebehu niekoľkých minút, obr. 15, a tiež aplikovať telo s najlepším prietokom okolo, pretože nízko poháňané auto nemá rezervu výkonu na prekonanie odporu vzduchu v dôsledku nedokonalosti aerodynamických foriem (kvôli vysokému koeficientu odporu).
Vozidlo s lineárnym kompresorom je dvojmiestne ľahké vozidlo (200 kg), obr. 16. Ide o jednoduchší a lacnejší analóg automobilu s lineárnym generátorom, ale s nižšou účinnosťou prenosu.
Ako snímač rýchlosti kolesa sa používa inkrementálny snímač. Inkrementálny snímač má impulzný výstup, pri otočení o určitý uhol sa na výstupe generuje napäťový impulz. Elektronický obvod snímača „počíta“ počet impulzov za jednotku času a tento kód zapíše do výstupného registra. Keď riadiaci systém „privedie“ kód (adresu) tohto senzora, elektronický obvod kodér, v sériovej forme, dáva kód z výstupného registra do informačného vodiča. Riadiaci systém číta kód senzora (informácie o rýchlosti otáčania kolesa) a podľa vopred určeného algoritmu generuje kód na riadenie krokového motora ovládača.
Náklady na vozidlo, pre väčšinu ľudí, je 20 ... 50 mesačných zárobkov. Ľudia si nemôžu dovoliť kúpiť nové auto za $ 8 ... $ 12 tisíc, a nie je tam žiadne auto na trhu v cenovom rozpätí $ 1 ... 2 tisíc dolárov. Použitie lineárneho elektrického generátora alebo kompresora, ako pohonnej jednotky vozidla, umožňuje vytvoriť ľahko použiteľné a lacné vozidlo.
Moderná výrobná technológia dosiek plošných spojov a sortiment vyrábaných elektronických výrobkov vám umožňuje vyrobiť takmer všetky elektrické prípojky pomocou dvoch vodičov - výkon a informácie. To znamená, že neinštalujte pripojenie každého jednotlivca elektrický spotrebič: snímače, ovládače a signalizačné zariadenia a napojenie každého zariadenia na spoločný napájací a spoločný informačný vodič. Riadiaci systém zase vydáva kódy (adresy) zariadení v sekvenčnom kóde dátovému drôtu a potom čaká na informáciu o stave zariadenia, a to aj v sekvenčnom kóde a pozdĺž toho istého riadku. Na základe týchto signálov riadiaci systém generuje riadiace kódy pre výkonné a signalizačné zariadenia a prenáša ich na prenos výkonných alebo signalizačných zariadení do nového stavu (v prípade potreby). Počas inštalácie alebo opravy musí byť teda každé zariadenie pripojené na dva vodiče (tieto dva vodiče sú spoločné pre všetky palubné elektrické spotrebiče) a elektrické uzemnenie.
Na zníženie nákladov, a tým aj ceny výrobkov pre spotrebiteľa, je potrebné zjednodušiť inštaláciu a elektrické pripojenie palubných zariadení. Napríklad, s tradičnou inštaláciou, zapnúť na zadnej strane bočné svetláje potrebné pomocou spínača uzavrieť elektrický napájací obvod osvetľovacieho zariadenia. Obvod pozostáva z: zdroja elektrickej energie, spojovacieho vodiča, relatívne výkonného ističa, elektrickej záťaže. Každý prvok obvodu, okrem napájania, vyžaduje individuálnu inštaláciu, lacný mechanický spínač, má nízky počet cyklov zapnutia / vypnutia. Pri veľkom počte palubných elektrických spotrebičov sa cena inštalačných a spojovacích vodičov zvyšuje úmerne počtu zariadení, zvyšuje pravdepodobnosť chyby spôsobenej ľudskými faktormi. S veľkovýrobou je jednoduchšie ovládať zariadenia a čítať informácie zo senzorov na jednom riadku, a nie individuálne, pre každé zariadenie. Napríklad, ak chcete aktivovať zadné obrysové svetlo, v tomto prípade je potrebné sa dotknúť dotykového dotykového senzora, riadiaci obvod vygeneruje riadiaci kód na aktiváciu zadného obrysového svetla. Na informačnom vodiči sa zobrazí adresa zariadenia na zapnutie zadného obrysového svetla a signál na zapnutie, po ktorom sa vnútorný napájací obvod zadného obrysového svetla zatvorí. To je elektrické obvody sú tvorené komplexným spôsobom: automaticky pri výrobe dosiek s plošnými spojmi (napríklad pri montáži dosiek na SMD vedenia) a elektrickým prepojením všetkých zariadení s dvoma spoločnými vodičmi a elektrickou "hmotou".
Ďakujem vám veľmi pekne za Váš príspevok k rozvoju národnej vedy a techniky!

Tablety s aktívnym uhlím sú určite v každej súprave prvej pomoci. Je to dobre známy adsorbent a používa sa ...

Rozhodli ste sa nezávisle pripojiť trojfázový motor do jednej fázy a nie ste elektrikár, potom je tento článok určený pre ...
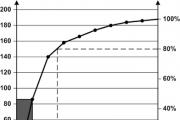
Každý počul o Paretovom pravidle alebo pravidle 80/20. Toto pravidlo sa nazýva aj Paretov zákon. Podstatou pravidla je ...

Pekný chlap k nej príde v kaviarni: - Dobrý deň, nie je tu zaneprázdnený? - Dobrý deň, nie! - Tak potom si vezmem stoličku. Večer ...

Prakticky na všetkých elektrických zariadeniach sú uvedené technické informácie, ktoré nie sú pripravené na pochopenie ...

História Donbassu INDUSTRIAL DEVELOPMENT DONBASS Druhá polovica XIX - začiatok XX storočia sa vyznačuje vysokou ...

Podmienky pre výber elektromotora Voľba jedného z katalógových typov elektromotorov sa zvažuje ...
Nie je možné výrazne zvýšiť silu pohybu a rýchlosť pohybu bez zvýšenia výkonu trakčných motorov ...

Pošlite svoju dobrú prácu do znalostnej bázy je jednoduchá. Použite formulár nižšie Študenti, ...

Moderné apartmány a domy, bez ohľadu na to, či sa nachádzajú vo veľkých mestách alebo malých osadách, ...

Rybári často ako kotva používajú vrecia na piesok, tehly a iné podobné veci. Ale tieto ...

3D ľudia milujú. Okamžite láka oko. Teraz používame Photoshop efekty, vytvoríme akýsi druh ...
Vo svete je výroba ropy pomerne aktívna. Tento produkt patrí do strategických zdrojov, v ... \\ t
Dobrý deň všetkým. V poslednom článku som preskúmal, v súvislosti s elektrickými obvodmi obsahujúcimi ...

Medzi patologickými poruchami videnia sa často vyskytuje astigmatizmus, porucha vizuálneho zaostrenia. Človeče, ...

Najbežnejšími elektromotormi na svete sú samozrejme asynchrónne motory. Ak chcete ...