फ्रैबकिंग कोब्ब्लास्ट जनरेटर कैसे करें
Minecraft में कोबलस्टोन। एक विशेषता ग्रे शेड होने के बाद, यह सामग्री निर्माण में मुख्य हो सकती है ...
इस लेख में, हम सैद्धांतिक रूप से और विशिष्ट समस्याओं के उदाहरण के रूप में बिंदु से बिंदु तक की दूरी निर्धारित करने के तरीकों पर विचार करेंगे। और शुरू करने के लिए, हम कुछ परिभाषाएं पेश करते हैं।
Yandex.RTB R-A-339285-1 परिभाषा 1
अंकों के बीच की दूरी - मौजूदा खंड में, उन्हें जोड़ने वाले खंड की लंबाई है। माप के लिए लंबाई की एक इकाई होने के लिए पैमाने को निर्धारित करना आवश्यक है। इसलिए, मूल रूप से बिंदुओं के बीच की दूरी को खोजने की समस्या को समन्वय रेखा पर, समन्वय विमान में या त्रि-आयामी अंतरिक्ष में उनके निर्देशांक का उपयोग करके हल किया जाता है।
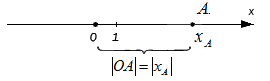
प्रारंभिक डेटा: समन्वय रेखा O x और एक मनमाना बिंदु A इस पर झूठ बोल रहा है। पंक्ति के प्रत्येक बिंदु में एक वास्तविक संख्या है: बिंदु A के लिए एक निश्चित संख्या होने दें एक्स एयह बिंदु A का समन्वय है।
सामान्य तौर पर, हम कह सकते हैं कि एक निश्चित खंड की लंबाई का मूल्यांकन किसी दिए गए पैमाने पर लंबाई की इकाई के रूप में लिए गए खंड की तुलना में होता है।
यदि बिंदु A एक पूर्णांक वास्तविक संख्या से मेल खाता है, तो बिंदु O से क्रमिक रूप से सीधी रेखा O के साथ एक बिंदु को परिभाषित करते हुए, खंड लंबाई की इकाइयाँ हैं, हम खंड O की लंबाई निर्धारित इकाई खंडों की कुल संख्या से निर्धारित कर सकते हैं।
उदाहरण के लिए, बिंदु A, संख्या 3 से मेल खाती है - बिंदु O से इसे प्राप्त करने के लिए, प्रत्येक इकाई खंडों को स्थगित करना आवश्यक होगा। यदि बिंदु A में 4 का समन्वय है, तो इकाई खंडों को एक समान तरीके से बंद किया जाता है, लेकिन एक अलग, नकारात्मक दिशा में। इस प्रकार, पहले मामले में, दूरी ओ ए 3 है; दूसरे मामले में, ओ ए \u003d 4।
यदि बिंदु A में समन्वय के रूप में एक परिमेय संख्या है, तो मूल (बिंदु O) से हम एक पूर्णांक संख्या इकाई खंडों को स्थगित करते हैं, और फिर उसका आवश्यक भाग। लेकिन ज्यामितीय रूप से, इसे मापना हमेशा संभव नहीं होता है। उदाहरण के लिए, समन्वय रेखा पर अंश 4 111 को स्थगित करना मुश्किल लगता है।
उपरोक्त विधि द्वारा सीधी रेखा पर एक अपरिमेय संख्या को स्थगित करना पूरी तरह से असंभव है। उदाहरण के लिए, जब बिंदु A का समन्वय 11 है। इस मामले में, अमूर्त की ओर मुड़ना संभव है: यदि बिंदु ए का निर्दिष्ट समन्वय शून्य से अधिक है, तो ओ ए \u003d एक्स ए (संख्या को दूरी के रूप में लिया जाता है); यदि समन्वय शून्य से कम है, तो O A \u003d - x A है। सामान्य तौर पर, ये कथन किसी भी वास्तविक संख्या x ए के लिए सही हैं।
सारांश: मूल से उस बिंदु की दूरी, जिस पर समन्वय रेखा से वास्तविक संख्या मेल खाती है,
यह स्पष्ट है कि खंड की लंबाई स्वयं नकारात्मक नहीं हो सकती है, इसलिए, मॉड्यूल के संकेत का उपयोग करते हुए, हम समन्वय के साथ बिंदु O से बिंदु A तक की दूरी लिखते हैं। एक्स ए: ओ ए \u003d एक्स ए
कथन सत्य होगा: एक बिंदु से दूसरे बिंदु की दूरी समन्वय अंतर के निरपेक्ष मूल्य के बराबर होगी।यानी A और B के अंक किसी भी स्थान पर एक ही समन्वय रेखा पर पड़े होते हैं और संबंधित निर्देशांक होते हैं एक्स ए और x B: A B \u003d x B - x A

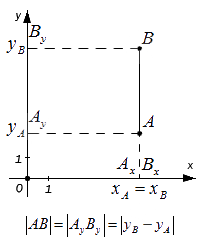
प्रारंभिक डेटा: दिए गए निर्देशांक के साथ एक आयताकार समन्वय प्रणाली O x y में विमान पर A और B स्थित बिंदु: A (x A, y A) और B (x B, y B)।
बिंदुओं ए और बी के माध्यम से लंबवत अक्षों को एक्स एक्स और ओ वाई को समन्वित करें, और इसके परिणामस्वरूप हमें प्रक्षेपण बिंदु मिलते हैं: ए एक्स, ए वाई, बी एक्स, बी वाई। अंक ए और बी के स्थान के आधार पर, निम्नलिखित विकल्प संभव हैं:
यदि अंक A और B संयोग करते हैं, तो उनके बीच की दूरी शून्य है;
यदि अंक A और B, O x अक्ष (फरसीसा अक्ष) के लंबवत रेखा पर स्थित हैं, तो अंक और संयोग, और | अ ब | \u003d | A य B य | । चूंकि बिंदुओं के बीच की दूरी उनके निर्देशांक के अंतर के निरपेक्ष मूल्य के बराबर है, तो ए वाई बी वाई \u003d वाई बी - वाई ए, और इसलिए ए बी \u003d ए वाई बी वाई \u003d वाई बी - वाई ए।
यदि अंक A और B, O y अक्ष (सीधा अक्ष) के लंबवत रेखा पर स्थित हैं - पिछले पैराग्राफ के साथ सादृश्य द्वारा: A B \u003d A x B x \u003d x B - x A

यदि अंक A और B समन्वय अक्षों में से एक पर लंबवत रेखा पर नहीं हैं, तो हम गणना सूत्र को प्राप्त करते हुए, उनके बीच की दूरी का पता लगाते हैं:
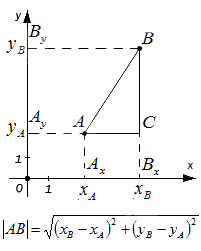
हम देखते हैं कि त्रिभुज ABC निर्माण में आयताकार है। इसके अलावा, ए सी \u003d ए एक्स बी एक्स और बी सी \u003d ए वाई बी वाई। पायथागॉरियन प्रमेय का उपयोग करते हुए, हम समानता बनाते हैं: AB 2 \u003d AC 2 + BC 2 2 AB 2 \u003d A x B x 2 + A y B y 2, और फिर इसे परिवर्तित करें: AB \u003d A x B x 2 + A y y 2 \u003d x B - x A 2 + y B - y A 2 \u003d (x B - x A) 2 + (y B - y A) 2
हम परिणाम से निष्कर्ष बनाते हैं: विमान पर बिंदु A से बिंदु B की दूरी इन बिंदुओं के निर्देशांक का उपयोग करके सूत्र द्वारा गणना द्वारा निर्धारित की जाती है
A B \u003d (x B - x A) 2 + (y B - y A) 2
प्राप्त सूत्र उन बिंदुओं या स्थितियों के संयोग के मामलों के लिए पहले से निर्मित कथनों की भी पुष्टि करता है जहाँ बिंदु अक्षों पर सीधी रेखाओं पर स्थित होते हैं। तो, अंक A और B के संयोग के मामले में, समानता सत्य होगी: A B \u003d (x B - x A) 2 + (y B - y A) 2 \u003d 0 2 + 0 2 \u003d 0
ऐसी स्थिति के लिए जब अंक और बी एक सीधी रेखा पर अनुपस्थित अक्ष पर स्थित होते हैं:
A B \u003d (x B - x A) 2 + (y B - y A) 2 \u003d 0 2 + (y B - y A) 2 \u003d y B - y A
मामले के लिए जब बिंदु A और B एक रेखा पर स्थित हैं जो कि अक्षीय अक्ष पर लंबवत है:
A B \u003d (x B - x A) 2 + (y B - y A) 2 \u003d (x B - x A) 2 + 0 2 \u003d x B - x A
प्रारंभिक डेटा: आयताकार समन्वय प्रणाली O x y z, दिए गए निर्देशांक A (x A, y A, z A) और B (x B, y B, z B) के साथ उस पर पड़े हुए मनमाने बिंदुओं के साथ है। इन बिंदुओं के बीच की दूरी को निर्धारित करना आवश्यक है।
सामान्य मामले पर विचार करें जब अंक ए और बी समन्वय विमानों में से एक के समानांतर एक विमान में झूठ नहीं बोलते हैं। बिंदुओं के माध्यम से A और B समतल अक्षों के लिए लंबवत विमानों को खींचें और संबंधित प्रक्षेपण बिंदु प्राप्त करें: A x, A y, A z, B x, B y, B z
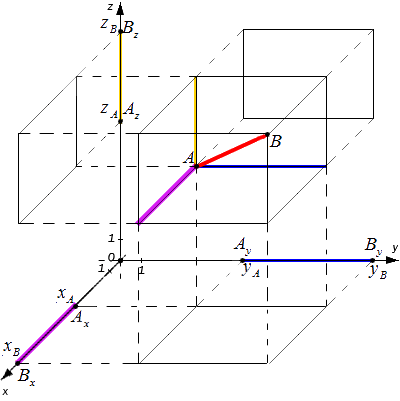
ए और बी के बीच की दूरी परिणामी समानांतर चतुर्भुज का विकर्ण है। इस बॉक्स के माप के निर्माण के अनुसार: ए एक्स बी एक्स, ए वाई बी वाई और ए जेड बी जेड
ज्यामिति के पाठ्यक्रम से यह ज्ञात है कि एक समानांतर चतुर्भुज के विकर्ण का वर्ग इसके आयामों के वर्गों के योग के बराबर है। इस कथन के आधार पर, हम समानता प्राप्त करते हैं: A B 2 \u003d A x B x 2 + A y B y 2 + A z B 2 2
पहले प्राप्त निष्कर्षों का उपयोग करते हुए, हम निम्नलिखित लिखते हैं:
ए एक्स बी एक्स \u003d एक्स बी - एक्स ए, ए वाई बी वाई \u003d वाई बी - वाई ए, ए जेड बी जेड \u003d जेड बी - ए ए
अभिव्यक्ति परिवर्तित करें:
AB 2 \u003d A x B x 2 + A y B y 2 + A z B z 2 \u003d x B - x A 2 + y B - y A 2 + z B - z A 2 \u003d \u003d (x B - x A) 2 + (y B - y A) 2 + z B - z A 2
सारांश अंतरिक्ष में बिंदुओं के बीच की दूरी को निर्धारित करने का सूत्र इस तरह दिखेगा:
A B \u003d x B - x A 2 + y B - y A 2 + (z B - z A) 2
परिणामी सूत्र उन मामलों के लिए भी मान्य है जब:
अंक मेल खाते हैं;
वे एक समन्वय अक्ष पर या एक अक्षीय अक्ष के समानांतर एक सीधी रेखा पर स्थित होते हैं।
प्रारंभिक डेटा: निर्देशांक रेखा और उस पर दिए गए बिंदुओं के साथ दिए गए निर्देशांक A (1 - 2) और B (11 + 2) दिए गए हैं। बिंदु A से बिंदु A और बिंदु A और B के बीच संदर्भ बिंदु O से दूरी खोजना आवश्यक है।
निर्णय
उत्तर: ओ ए \u003d 2 - 1, ए बी \u003d 10 + 2 2
उदाहरण 2
प्रारंभिक डेटा: एक आयताकार समन्वय प्रणाली और उस पर पड़े दो बिंदु A (1, - 1) और B (λ + 1, 3) दिए गए हैं। λ कुछ वास्तविक संख्या है। इस संख्या के सभी मूल्यों को खोजना आवश्यक है, जिस पर दूरी A B 5 होगी।
निर्णय
अंक A और B के बीच की दूरी ज्ञात करने के लिए, आपको सूत्र A B \u003d (x B - x A) 2 + y B - y a 2 का उपयोग करना होगा
निर्देशांक के वास्तविक मूल्यों को प्रतिस्थापित करते हुए, हम प्राप्त करते हैं: A B \u003d (λ + 1 - 1) 2 + (3 - (- 1)) 2 \u003d λ 2 + 16
और हम मौजूदा स्थिति का भी उपयोग करते हैं कि A B \u003d 5 और फिर समानता सत्य होगी:
λ 2 + 16 \u003d 5 λ 2 + 16 \u003d 25 λ \u003d \u003d 3
उत्तर: A B \u003d 5 यदि λ \u003d 5 3।
उदाहरण 3
प्रारंभिक डेटा: एक त्रि-आयामी स्थान एक आयताकार समन्वय प्रणाली O x y z और अंक A (1, 2, 3) और B - 7, - 2, 4 में दिया गया है।
निर्णय
समस्या को हल करने के लिए, हम सूत्र A B \u003d x B - x A 2 + y B - y A 2 + (z B - z) 2 का उपयोग करते हैं
वास्तविक मूल्यों को प्रतिस्थापित करते हुए, हम प्राप्त करते हैं: A B \u003d (- 7 - 1) 2 + (- 2 - 2) 2 + (4 - 3) 2 \u003d 81 \u003d 9
उत्तर: | अ ब | \u003d 9
यदि आपको पाठ में कोई त्रुटि दिखाई देती है, तो कृपया इसे चुनें और Ctrl + Enter दबाएं
विमान का प्रत्येक बिंदु इसके निर्देशांक (x, y) की विशेषता है। वे वेक्टर 0 ए के निर्देशांक के साथ मेल खाते हैं, जिससे बिंदु 0 - मूल निकल जाता है।
आज्ञा दें कि A और B क्रमशः निर्देशांक (x 1 y 1) और (x 2, y 2) के साथ समतल के मनमाने बिंदु हैं।

फिर वेक्टर एबी में स्पष्ट रूप से निर्देशांक हैं (x 2 - x 1, y 2 - y 1)। यह ज्ञात है कि एक वेक्टर की लंबाई का वर्ग इसके निर्देशांक के वर्गों के योग के बराबर है। इसलिए, बिंदु ए और बी के बीच की दूरी, या, बराबर, वेक्टर एबी की लंबाई, स्थिति से निर्धारित होती है
d 2 \u003d (x 2 - x 1) 2 + (y 2 - y 1) 2।
$ $ d \u003d \\ sqrt ((x_2 - x_1) ^ 2 + (y_2 - y_1) ^ 2) $$
परिणामी सूत्र आपको विमान के किसी भी दो बिंदुओं के बीच की दूरी का पता लगाने की अनुमति देता है, अगर केवल इन बिंदुओं के निर्देशांक ज्ञात हों
हर बार, विमान पर एक विशेष बिंदु के निर्देशांक के बारे में बोलते हुए, हमारा मतलब एक अच्छी तरह से परिभाषित समन्वय प्रणाली x0y है। लेकिन सामान्य तौर पर, विमान पर समन्वय प्रणाली को विभिन्न तरीकों से चुना जा सकता है। इसलिए, समन्वय प्रणाली x0y के बजाय, हम समन्वय प्रणाली x of y 'पर विचार कर सकते हैं, जो कि शुरुआती बिंदु 0 के आसपास पुराने समन्वय अक्षों को मोड़कर प्राप्त किया जाता है। वामावर्त कोने पर तीर α .

यदि समन्वय प्रणाली में विमान के कुछ बिंदु x0y में निर्देशांक (x, y) थे, तो नए समन्वय प्रणाली x system y 'में पहले से ही अन्य निर्देशांक (x', y ') होंगे।
उदाहरण के रूप में, अक्ष M पर स्थित बिंदु M पर विचार करें 'और बिंदु 0 से 1 के बराबर दूरी पर स्थित है।
जाहिर है, समन्वय प्रणाली x0y में इस बिंदु में निर्देशांक (cos) है α , पाप α ), और समन्वय प्रणाली में x and y 'निर्देशांक (1,0)।
विमान A और B के किन्हीं दो बिंदुओं के निर्देशांक इस बात पर निर्भर करते हैं कि इस विमान में समन्वय प्रणाली कैसे परिभाषित की जाती है। और यहाँ इन बिंदुओं के बीच की दूरी समन्वय प्रणाली को स्थापित करने की विधि पर निर्भर नहीं करती है .
अन्य सामग्रीएक आयताकार समन्वय प्रणाली दी जाए।
प्रमेय 1.1।किसी भी दो बिंदुओं के लिए M 1 (x 1; y 1) और M 2 (x 2; y 2) विमान के बीच, उनके बीच की दूरी d सूत्र द्वारा व्यक्त की जाती है
सबूत।हम क्रमशः M 1 और M 2 के लंबवत M 1 B और M 2 A से चूकते हैं
 अक्ष Oy और Ox पर और K द्वारा लाइनों M 1 B और M 2 A (चित्र 1.4) के प्रतिच्छेदन बिंदु को दर्शाते हैं। निम्नलिखित मामले संभव हैं:
अक्ष Oy और Ox पर और K द्वारा लाइनों M 1 B और M 2 A (चित्र 1.4) के प्रतिच्छेदन बिंदु को दर्शाते हैं। निम्नलिखित मामले संभव हैं:
1) अंक एम 1, एम 2 और के अलग हैं। जाहिर है, बिंदु K में निर्देशांक (x 2; y 1) है। यह देखना आसान है कि M 1 K \u003d fx 2 - x 1 ô, M 2 K \u003d fu 2 - 1 ô पर। क्योंकि ΔМ 1 КМ 2 आयताकार है, फिर पाइथोगोरियन प्रमेय द्वारा d \u003d М 1 М 2 \u003d  = .
= .
2) बिंदु K बिंदु M 2 के साथ मेल खाता है, लेकिन बिंदु M 1 (चित्र 1.5) से भिन्न होता है। इस मामले में, y 2 \u003d y 1
 और d \u003d M 1 M 2 \u003d M 1 K \u003d fx 2 - x 1 ô \u003d
और d \u003d M 1 M 2 \u003d M 1 K \u003d fx 2 - x 1 ô \u003d  =
=
3) प्वाइंट K, बिंदु M 1 से मेल खाता है, लेकिन बिंदु M 2 से भिन्न होता है। इस स्थिति में, x 2 \u003d x 1 और d \u003d
एम 1 एम 2 \u003d केएम 2 \u003d फू 2 - 1 ओएच \u003d पर  = .
= .
4) बिंदु M 2 बिंदु M 1 के साथ मेल खाता है। फिर x 1 \u003d x 2, y 1 \u003d y 2 और
d \u003d M 1 M 2 \u003d O \u003d।
इस संबंध में खंड का विभाजन।
बता दें कि एक मनमाना सेगमेंट M 1 M 2 प्लेन पर दिया गया है और M को इस बात का कोई मतलब बताया जाए
 बिंदु M 2 (छवि 1.6) के अलावा अन्य खंड। समानता l \u003d द्वारा परिभाषित संख्या l
बिंदु M 2 (छवि 1.6) के अलावा अन्य खंड। समानता l \u003d द्वारा परिभाषित संख्या l  कहा जाता है रवैया,किस बिंदु पर M, खंड M 1 M 2 को विभाजित करता है।
कहा जाता है रवैया,किस बिंदु पर M, खंड M 1 M 2 को विभाजित करता है।
प्रमेय 1.2।यदि बिंदु M (x; y) खंड M 1 M 2 को l के संबंध में विभाजित करता है, तो इस के निर्देशांक सूत्र द्वारा निर्धारित किए जाते हैं
x \u003d  , य \u003d
, य \u003d  ,
(4)
,
(4)
जहाँ (x 1; y 1) बिंदु M 1, (x 2; y 2) के निर्देशांक, बिंदु M 2 के निर्देशांक।
सबूत।आइए हम सूत्रों के पहले (4) सिद्ध करें। दूसरा सूत्र समान सिद्ध होता है। दो मामले संभव हैं।
x \u003d x 1 \u003d  =
=  = .
= .
2) सीधी रेखा एम 1 एम 2 ऑक्सी अक्ष (चित्र 1.6) के लंबवत नहीं है। हम अक्ष ऑक्स पर M 1, M, M 2 के बिंदुओं से लंबों को छोड़ते हैं और क्रमशः अक्ष 1, P 1, P, P 2 के साथ उनके चौराहे के बिंदुओं को निरूपित करते हैं। आनुपातिक खंड प्रमेय द्वारा  \u003d एल।
\u003d एल।
क्योंकि P 1 P \u003d fx - x 1 ô, PP 2 \u003d fx 2 - xô और संख्याएँ (x - x 1) और (x 2 - x) एक ही संकेत है (x 1 के लिए)< х 2 они положительны, а при х 1 > x 2 नकारात्मक हैं), फिर
ल \u003d \u003d  ,
,
x - x 1 \u003d l (x 2 - x), x + lx \u003d x 1 + lx 2,
x \u003d .
कोरोलरी 1.2.1।यदि M 1 (x 1; y 1) और M 2 (x 2; y 2) (दो मनमाना बिंदु हैं और बिंदु M (x; y) segment खंड M 1 M 2 के मध्य है, तो
x \u003d  , य \u003d
, य \u003d  (5)
(5)
सबूत। चूंकि M 1 M \u003d M 2 M, तब l \u003d 1 और सूत्र (4) से हम सूत्र (5) प्राप्त करते हैं।
त्रिभुज का क्षेत्रफल।
प्रमेय 1.3।किसी भी बिंदु के लिए A (x 1; y 1), B (x 2; y 2) और C (x 3; y 3) एक-एक करके पड़े हैं;
लाइन, त्रिभुज ABC का क्षेत्रफल S सूत्र द्वारा व्यक्त किया गया है
S \u003d ô (x 2 - x 1) (y 3 - y 1) - (x 3 - x 1) (y 2 - y 1) ô (6)
सबूत।क्षेत्र ∆ ABC अंजीर में दिखाया गया है। 1.7, गणना निम्नानुसार है
 S ABC \u003d S ADEC + S BCEF - S ABFD।
S ABC \u003d S ADEC + S BCEF - S ABFD।
हम ट्रेपोज़ॉइड के क्षेत्र की गणना करते हैं:
एस ADEC \u003d  ,
,
एस BCEF \u003d 
एस एबीएफडी \u003d 
अब हमारे पास है
S ABC \u003d ((x 3 - x 1) (y 3 + y 1) + (x 3 - x 2) (y 3 + y 2) - (x 2 - y 1) (y 1 + y 2) \u003d (x 3 y 3 - x 1 y 3 + x 3 y 1 - x 1 y 1 + x 2 y 3 - x 3 y 3 + x 2 y 2 - x 3 y 2 - x 2 y 1 + x 1 y 1 - x 2 y 2 + x 1 y 2) \u003d (x 3 y 1 - x 3 y 2 + x 1 y 2 - x 2 y 1 + x 2 y 3 -
X 1 y 3) \u003d (x 3 (y 1 - y 2) + x 1 y 2 - x 1 y 1 + x 1 y 1 - x 2 y 1 + y 3 (x 2 - x 1) \u003d \u003d (x 1 (y 2 - y 1) - x 3 (y 2 - y 1) + + 1 (x 1 - x 2) - y 3 (x 1 - x 2)) \u003d ((x 1 - x 3) (2 y 2 - y 1) + (x 1 - x 3) (y 1 - y 3)) \u003d ((x 2 - x 1) (3 - y 1) -
- (x 3 - x 1) (y 2 - y 1))।
एक अलग स्थान, एबीसी के लिए, सूत्र (6) समान रूप से सिद्ध होता है, लेकिन यह "-" चिन्ह के साथ बदल सकता है। इसलिए, सूत्र (6) में मॉड्यूल का चिह्न डालें।
व्याख्यान २।
समतल पर एक सीधी रेखा का समीकरण: एक मुख्य गुणांक वाली रेखा का समीकरण, रेखा का सामान्य समीकरण, खंडों में एक रेखा का समीकरण, दो बिंदुओं से गुजरने वाली रेखा का समीकरण। रेखाओं के बीच का कोण, समांतरता की स्थिति और समतल पर लाइनों की लंबवतता।
2.1. एक आयताकार समन्वय प्रणाली और कुछ लाइन एल।
परिभाषा 2.1।वेरिएबल x और y को जोड़ने वाले फॉर्म F (x; y) \u003d 0 के समीकरण को कहा जाता है लाइन एल का समीकरण(किसी दिए गए समन्वय प्रणाली में) यदि रेखा L पर पड़े किसी बिंदु के निर्देशांक इस समीकरण को संतुष्ट करते हैं और किसी बिंदु के निर्देशांक इस रेखा पर संतुष्ट नहीं होते हैं।
एक विमान पर लाइनों के समीकरण के उदाहरण।
1) एक आयताकार समन्वय प्रणाली (चित्र 2.1) के ओए अक्ष के समानांतर एक सीधी रेखा पर विचार करें। अक्ष A के साथ इस रेखा के चौराहे के बिंदु को निरूपित करें, (a; o) or इसका या-
 तालमेल। समीकरण x \u003d एक दी गई रेखा का समीकरण है। वास्तव में, इस रेखा के किसी भी बिंदु M (a; y) के निर्देशांक इस समीकरण को संतुष्ट करते हैं और किसी भी बिंदु के निर्देशांक को संतुष्ट नहीं करते हैं जो रेखा पर झूठ नहीं बोलता है। यदि a \u003d 0 है, तो रेखा उस अक्ष Oy से मेल खाती है, जिसका समीकरण x \u003d 0 है।
तालमेल। समीकरण x \u003d एक दी गई रेखा का समीकरण है। वास्तव में, इस रेखा के किसी भी बिंदु M (a; y) के निर्देशांक इस समीकरण को संतुष्ट करते हैं और किसी भी बिंदु के निर्देशांक को संतुष्ट नहीं करते हैं जो रेखा पर झूठ नहीं बोलता है। यदि a \u003d 0 है, तो रेखा उस अक्ष Oy से मेल खाती है, जिसका समीकरण x \u003d 0 है।
2) समीकरण x - y \u003d 0 समतल बिंदुओं के समूह को परिभाषित करता है जो I और III के कोणों का समन्वय करता है।
3) समीकरण x 2 - y 2 \u003d 0 the यह समन्वय कोणों के दो द्विभाजक का समीकरण है।
4) समीकरण x 2 + y 2 \u003d 0 समतल पर एक अद्वितीय बिंदु O (0; 0) को परिभाषित करता है।
5) समीकरण x 2 + y 2 \u003d 25 origin मूल पर केंद्रित 5 त्रिज्या के वृत्त का समीकरण है।
सैद्धांतिक सवाल
योजना पर विश्लेषणात्मक भूविज्ञान
1. समन्वय विधि: संख्यात्मक लाइन, लाइन पर निर्देशांक; आयताकार (कार्टेशियन) विमान पर समन्वय प्रणाली; ध्रुवीय निर्देशांक।
एक सीधी रेखा पर विचार करें। हम उस पर एक दिशा चुनते हैं (फिर यह एक अक्ष बन जाता है) और एक निश्चित बिंदु 0 (मूल)। एक चयनित दिशा और उत्पत्ति वाली रेखा को कहा जाता है समन्वय रेखा (हम मानते हैं कि पैमाने की इकाई का चयन किया जाता है)।
चलो एम - समन्वय रेखा पर एक मनमाना बिंदु। हम बिंदु के अनुसार डालते हैं एम वास्तविक संख्या एक्सके बराबर है ओम लंबाई: x \u003d ओम।संख्या एक्स बिंदु समन्वय कहा जाता है एम.

इस प्रकार, समन्वय रेखा का प्रत्येक बिंदु एक निश्चित वास्तविक संख्या से मेल खाता है - इसका समन्वय। यह वाक्य भी सही है, प्रत्येक वास्तविक संख्या x के लिए समन्वय रेखा पर एक निश्चित बिंदु से मेल खाती है, अर्थात् ऐसा बिंदु एमजिसका समन्वय x है। इसे पत्राचार कहा जाता है से एक करने के लिए एक।
तो, वास्तविक संख्या को समन्वय रेखा के बिंदुओं द्वारा दर्शाया जा सकता है, अर्थात। समन्वय रेखा सभी वास्तविक संख्याओं के सेट की एक छवि है। इसलिए, सभी वास्तविक संख्याओं के सेट को कहा जाता है संख्या रेखा, और किसी भी संख्या - इस रेखा का एक बिंदु। एक संख्या रेखा पर एक बिंदु के पास, एक संख्या को अक्सर संकेत दिया जाता है - इसका समन्वय।
एक आयताकार (या कार्टेशियन) एक विमान पर प्रणाली का समन्वय करता है।
दो परस्पर लंबवत अक्ष एक्स के बारे में और अरे य!एक सामान्य शुरुआत है ओहऔर पैमाने की एक ही इकाई, रूप आयताकार (या कार्टेशियन) विमान पर प्रणाली का समन्वय करता है।
अक्ष OXफरसीसा अक्ष, अक्ष कहा जाता है OY - निर्देशांक की धुरी। बिंदु ओह कुल्हाड़ियों के चौराहे को मूल कहा जाता है। वह विमान जिसमें अक्ष स्थित हों OX और OY को समतल विमान कहा जाता है और इसके द्वारा निरूपित किया जाता है ओह xy.
तो, विमान पर आयताकार समन्वय प्रणाली विमान के सभी बिंदुओं और संख्याओं के जोड़े के सेट के बीच एक-से-एक पत्राचार स्थापित करती है, जो ज्यामितीय समस्याओं को हल करते समय बीजीय विधियों का उपयोग करना संभव बनाती है। समन्वित अक्ष विमान को 4 भागों में विभाजित करते हैं, उन्हें कहा जाता है क्वार्टर में, वर्ग या समन्वय कोण.
ध्रुवीय निर्देशांक।
ध्रुवीय समन्वय प्रणाली में कुछ बिंदु होते हैं ओहकहा जाता है ध्रुव, और उससे निकलने वाली किरण ँकहा जाता है ध्रुवीय अक्ष। इसके अलावा, खंडों की लंबाई मापने के लिए पैमाने की एक इकाई निर्धारित है। एक ध्रुवीय समन्वय प्रणाली दी जाए और चलें एम विमान पर एक मनमाना बिंदु है। द्वारा निरूपित करें पी - बिंदु दूरी एम बिंदु से ओहऔर के माध्यम से φ - वह कोण जिसके द्वारा किरण बीम के साथ संरेखित करने के लिए ध्रुवीय अक्ष वामावर्त घुमाती है ओम.

ध्रुवीय निर्देशांक बिंदु एम नंबर कहा जाता है पी और φ । संख्या पी पहले समन्वय पर विचार करें और कॉल करें ध्रुवीय त्रिज्यासंख्या φ - दूसरा समन्वय कहा जाता है ध्रुवीय कोण.
बिंदु एमध्रुवीय निर्देशांक के साथ पी और φ
निम्नानुसार चिह्नित हैं: एम (; φ)। हम एक बिंदु के ध्रुवीय निर्देशांक और उसके आयताकार निर्देशांक के बीच एक संबंध स्थापित करते हैं।
इस मामले में, हम मान लेंगे कि आयताकार समन्वय प्रणाली की उत्पत्ति ध्रुव में है, और फरसीसा का सकारात्मक अर्ध-धुरी ध्रुवीय अक्ष के साथ मेल खाता है।


बिंदु M का आयताकार निर्देशांक है एक्स और Y और ध्रुवीय निर्देशांक पी और φ .
| (1) |
सबूत।
डॉट्स से बाहर निकलें एम 1 और एम 2 perpendiculars एम 1 वी और एम 1 ए,। क्योंकि (x 2; y 2)। प्रमेय द्वारा, यदि एम 1 (एक्स 1) और एम 2 (एक्स 2) - कोई भी दो बिंदु और α- उनके बीच की दूरी, फिर α \u003d α- दिनांक १- x २ - x १ | .
विमान पर उनके निर्देशांक के अनुसार बिंदुओं के बीच की दूरी की गणना पृथ्वी की सतह पर प्राथमिक है - थोड़ा और अधिक जटिल: हम प्रक्षेपण परिवर्तनों के बिना बिंदुओं के बीच की दूरी और प्रारंभिक दिगंश को मापने पर विचार करेंगे। शुरू करने के लिए, हम शब्दावली को समझेंगे।
गोले की सतह पर किसी भी दो बिंदुओं के माध्यम से, यदि वे सीधे एक दूसरे के विपरीत नहीं हैं (अर्थात, वे एंटीपोड नहीं हैं), तो एक अद्वितीय बड़े चक्र को खींचा जा सकता है। दो बिंदु एक बड़े वृत्त को दो चापों में विभाजित करते हैं। लघु चाप की लंबाई दो बिंदुओं के बीच की सबसे छोटी दूरी है। दो एंटीपोड बिंदुओं के बीच बड़ी संख्या में बड़े वृत्त खींचे जा सकते हैं, लेकिन उनके बीच की दूरी किसी भी सर्कल पर समान होगी और सर्कल के आधे परिधि के बराबर होगी, या R * R, जहां R गोला के त्रिज्या होगा।

एक विमान पर (एक आयताकार समन्वय प्रणाली में), बड़े वृत्त और उनके टुकड़े, जैसा कि ऊपर बताया गया है, सूक्ति को छोड़कर सभी अनुमानों में आर्क हैं, जहां बड़े वृत्त सीधी रेखाएं हैं। व्यवहार में, इसका मतलब है कि हवाई जहाज और अन्य हवाई परिवहन हमेशा ईंधन बचाने के लिए बिंदुओं के बीच न्यूनतम दूरी के मार्ग का उपयोग करते हैं, अर्थात, उड़ान को एक बड़े वृत्त की दूरी के साथ किया जाता है, विमान पर यह एक चाप जैसा दिखता है।

पृथ्वी के आकार को एक गोले के रूप में वर्णित किया जा सकता है, इसलिए एक बड़े वृत्त पर दूरियों की गणना के लिए समीकरण पृथ्वी की सतह पर बिंदुओं के बीच कम से कम दूरी की गणना के लिए महत्वपूर्ण हैं और अक्सर नेविगेशन में उपयोग किया जाता है। इस विधि द्वारा दूरी की गणना अधिक कुशल है और कई मामलों में इसे डिज़ाइन किए गए निर्देशांक (आयताकार समन्वय प्रणालियों में) के लिए गणना करने की तुलना में अधिक सटीक है, क्योंकि, सबसे पहले, आपको भौगोलिक निर्देशांक को एक आयताकार समन्वय प्रणाली (प्रक्षेपण परिवर्तनों को पूरा करना) में अनुवाद करने की आवश्यकता नहीं है, और दूसरे, कई अनुमान, अगर गलत तरीके से चुने गए हैं, तो प्रोजेक्शन विकृतियों की प्रकृति के कारण महत्वपूर्ण लंबाई विकृतियां हो सकती हैं। यह ज्ञात है कि क्षेत्र के बजाय दीर्घवृत्त पृथ्वी के आकार का अधिक सटीक वर्णन करता है, हालांकि, इस लेख में, एक गोले पर दूरी की गणना को माना जाता है, 6372795 मीटर के त्रिज्या के साथ एक गोले का उपयोग गणनाओं के लिए किया जाता है, जो 0.5% के क्रम की दूरी की गणना करने में त्रुटि पैदा कर सकता है।
Minecraft में कोबलस्टोन। एक विशेषता ग्रे शेड होने के बाद, यह सामग्री निर्माण में मुख्य हो सकती है ...
Minecraft में मनोरंजन की एक विस्तृत विविधता है। उदाहरण के लिए, आप एक बड़ा घर बना सकते हैं और ...
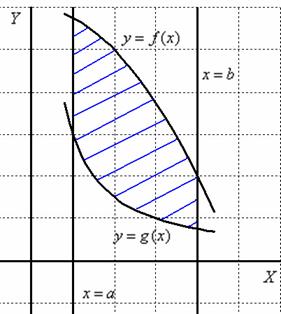
हम दोहरे अभिन्न की गणना की वास्तविक प्रक्रिया पर विचार करना शुरू करते हैं और इसके ज्यामितीय अर्थ से परिचित होते हैं ...।

सर्वनाम और व्यावहारिक सिद्धांत एक सर्वनाम भाषण का एक हिस्सा है जो वस्तुओं, संकेतों और ... को इंगित करता है

आज हम आम तौर पर मिनीक्राफ्ट में तंत्र के बारे में बात करेंगे, उनमें से किस प्रकार के खेल मौजूद हैं और प्रत्येक को कैसे बनाना है ...
यौगिकों के उदाहरणों के साथ अकार्बनिक पदार्थों का वर्गीकरण अब हम ऊपर प्रस्तुत वर्गीकरण का विश्लेषण करते हैं ...

जब फैशन की बात आती है, तो Minecraft में एक पहलू होता है जो अक्सर अपरिचित रहता है। वह ऐसा है ...

- मरीना निकोलेवना, आर्थिक सुरक्षा एक आशाजनक विशेषता है? बहुत होनहार ...।
उदाहरण 1.6 / 2 \u003d 0.8; 4/5 \u003d 0.8; 5.6 / 7 \u003d 0.8, आदि आनुपातिकता के गुणांक अपरिवर्तित ...
समानता f (x; y) \u003d 0 दो चर के साथ एक समीकरण का प्रतिनिधित्व करता है। इस समीकरण का हल एक जोड़ी है ...

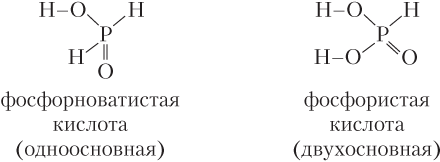
हमारे जीवन में एसिड की भूमिका को कम मत समझो, क्योंकि उनमें से कई बस रोजमर्रा की जिंदगी में अपूरणीय हैं ...।
(फाइबोनैचि संख्या, अंग्रेजी फाइबोनैचि अनुक्रम, फाइबोनैचि संख्याएँ) - संख्याओं की एक श्रृंखला, जिसे एक प्रसिद्ध गणितज्ञ द्वारा घटाया गया है ...
आनुपातिकता दो मात्राओं के बीच का संबंध है, जिसमें उनमें से एक में परिवर्तन की आवश्यकता होती है ...
इस गणितीय कार्यक्रम का उपयोग करके, आप दो चर वाले दो रैखिक समीकरणों की एक प्रणाली को हल कर सकते हैं ...

Minecraft में सभी सरल तंत्रों की एक सूची को रचनात्मक मोड में देखा जा सकता है, सूची के "यांत्रिकी" टैब में ...
ठोस के बारे में बात करें। ठोस को दो बड़े समूहों में विभाजित किया जा सकता है: अनाकार और क्रिस्टलीय ...।