डोनेट्स्क क्षेत्र के खनिज
"लगभग हर दिन, हमारे वैज्ञानिक, पृथ्वी की आंतों की खोज करते हैं, इसमें कोयले के सभी नए विशाल भंडार पाए जाते हैं, ...
विद्युत प्रतिष्ठानों में स्थितियां होती हैं, जब विद्युत प्रवाह के बिना सीधे चालू चालू करना असंभव होता है। यह यह विद्युत मोटर है जिसे रोटर के रोटेशन की गति से समायोजित किया जा सकता है, जिसे विद्युत प्रतिष्ठानों में आवश्यक है। सच है, उसके पास बहुत सारी खामियां हैं, और उनमें से एक ब्रश का तेजी से पहनना है, अगर उनकी स्थापना वक्रता के साथ की गई थी, और उनकी सेवा का जीवन कम है। पहने जाने पर स्पार्किंग होती है, इसलिए विस्फोटक और धूल भरे कमरों में इस इंजन का उपयोग नहीं किया जा सकता है। साथ ही, डीसी मोटर महंगी है। इस स्थिति को बदलने के लिए, एक अतुल्यकालिक मोटर और एक अतुल्यकालिक मोटर के लिए एक आवृत्ति नियंत्रक का उपयोग करें।
लगभग सभी मामलों में, वैकल्पिक चालू पर चलने वाले इलेक्ट्रिक मोटर्स एक निरंतर प्रवाह पर अपने समकक्षों से आगे निकल जाते हैं। सबसे पहले, वे सुरक्षित हैं। दूसरे, उनके छोटे आयाम और वजन हैं। तीसरा, कीमत कम है। चौथा, वे संचालित करने और कनेक्ट करने में आसान हैं।
लेकिन उनके पास एक खामी है - यह घूर्णी गति को नियंत्रित करने की कठिनाई है। इस मामले में, अतुल्यकालिक मोटर्स की आवृत्ति को विनियमित करने के मानक तरीके यहां उपयुक्त नहीं हैं, अर्थात्, वोल्टेज परिवर्तन, प्रतिरोध की स्थापना, और इसी तरह। एक अतुल्यकालिक इलेक्ट्रिक मोटर की आवृत्ति नियंत्रण - एक समस्या नंबर एक थी। यद्यपि सैद्धांतिक आधार पिछली शताब्दी के तीसवें दशक से पहले से ही ज्ञात है। पूरी बात आवृत्ति कनवर्टर की उच्च लागत पर आराम करती थी। जब उन्होंने माइक्रोचिप्स का आविष्कार किया तो सब कुछ बदल गया, जिसकी मदद से ट्रांजिस्टर के माध्यम से न्यूनतम लागत के साथ एक आवृत्ति कनवर्टर को इकट्ठा करना संभव हो गया।
तो, एक अतुल्यकालिक मोटर की घूर्णी गति को नियंत्रित करने की विधि एक सूत्र पर आधारित है। यहाँ यह नीचे है।
ω = 2π एफ / पी, जहां
यही है, यह पता चला है कि केवल वोल्टेज आवृत्ति को बदलकर एक इलेक्ट्रिक मोटर के रोटेशन की गति को बदलना संभव है। यह व्यवहार में क्या देता है? पहला मोटर की चिकनाई है, यह विशेष रूप से उपकरण शुरू करते समय महसूस करेगा, जब इंजन स्वयं उच्चतम भार के तहत संचालित होता है। दूसरी बढ़ी हुई पर्ची है। इसके कारण, दक्षता बढ़ जाती है, और बिजली विशेषताओं का नुकसान कम हो जाता है।
सभी आधुनिक आवृत्ति कन्वर्टर्स तथाकथित दोहरे रूपांतरण के सिद्धांत पर आधारित हैं। यही है, बारी-बारी से चालू डीसी को एक अप्रबंधित सुधारक और फिल्टर के माध्यम से परिवर्तित किया जाता है। इसके अलावा, पल्स इन्वर्टर के माध्यम से (यह तीन चरण है), प्रत्यावर्ती धारा में प्रत्यावर्ती धारा का विपरीत परिवर्तन होता है। इन्वर्टर में ही छह पावर स्विच (ट्रांजिस्टर) होते हैं। इसलिए इलेक्ट्रिक इंजन की प्रत्येक वाइंडिंग विशिष्ट रेक्टिफायर कीज़ (सकारात्मक या नकारात्मक) से जुड़ी होती है। यह इन्वर्टर है जो स्टेटर वाइंडिंग पर लगाए जाने वाले वोल्टेज की आवृत्ति को बदलता है। वास्तव में, यह उसके माध्यम से है कि मोटर की आवृत्ति विनियमन होती है।

इस उपकरण में, आउटपुट ट्रांजिस्टर स्थापित किए जाते हैं। वे चाबियों की भूमिका निभाते हैं। यदि हम उनकी तुलना थाइरिस्टर से करते हैं, तो यह ध्यान दिया जाना चाहिए कि पूर्व साइनसॉइड के रूप में एक संकेत देता है। यह यह रूप है जो न्यूनतम विकृति पैदा करता है।
अब आवृत्ति कनवर्टर के संचालन का सिद्धांत। इसे समझने के लिए, हम नीचे दिए गए आंकड़े को अलग करने का प्रस्ताव करते हैं।
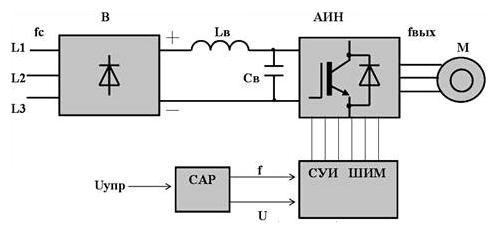
तो, चलो चित्र के माध्यम से चलते हैं, जहां
योजना के अनुसार, यह बहुत स्पष्ट रूप से देखा जाता है कि पलटनेवाला पल्स-चौड़ाई नियंत्रण प्रणाली (यह उच्च-आवृत्ति) के कारण वोल्टेज की आवृत्ति को समायोजित करता है। यह रेगुलेटर का यह हिस्सा है जो रेक्टिफायर के पॉजिटिव पोल के वैकल्पिक रूप से इलेक्ट्रिक मोटर के स्टेटर वाइंडिंग को जोड़ने के लिए जिम्मेदार है, फिर नेगेटिव को। ध्रुवों से कनेक्शन की आवृत्ति एक साइनसोइडल वक्र में होती है। दालों की आवृत्ति पीडब्लूएम की आवृत्ति से निर्धारित होती है। इस तरह से आवृत्ति नियमन होता है।
पिछले 10-25 वर्षों में, डीसी मोटर्स से एसी ड्राइव पर जाने के लिए एक स्पष्ट प्रवृत्ति हुई है, एसी मोटर्स को नियंत्रित करने और पावर इलेक्ट्रॉनिक्स के विकास के लिए बेहतर कानूनों के लिए धन्यवाद।
डीसी मोटर्स की तुलना में उनकी सादगी, कम लागत, बढ़ी हुई विश्वसनीयता, काफी छोटे आयाम और वजन के कारण एसी मोटर्स का उपयोग। गति नियंत्रण के नुकसान को एसी मशीनों और नियंत्रण एल्गोरिदम के सिद्धांत की उच्च जटिलता के लिए जिम्मेदार ठहराया जा सकता है, जो कनवर्टर डिवाइस में एम्बेडेड है।
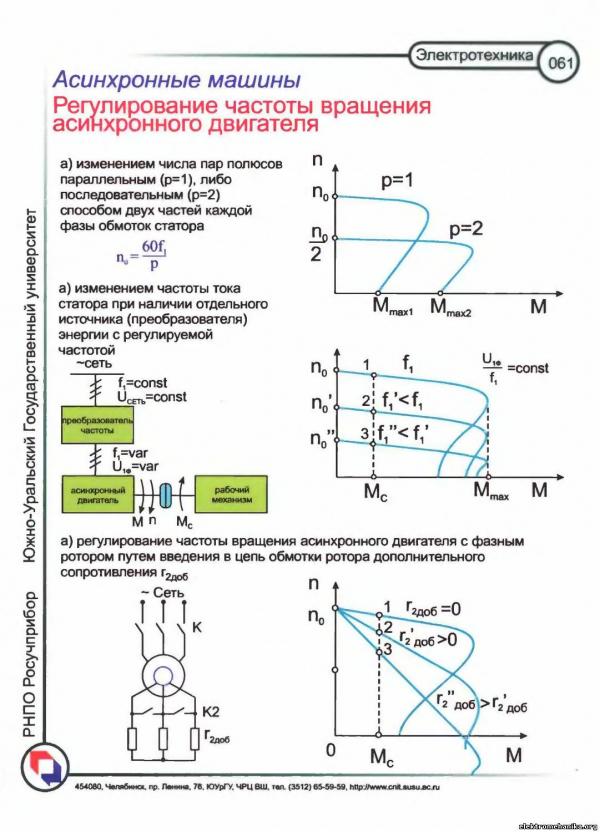
सबसे व्यापक रूप से इस्तेमाल किया जाता है एक प्रेरण मोटर के कोणीय वेग को नियंत्रित करने के निम्नलिखित तरीके हैं: 1) प्रतिरोधक; 2) स्टेटर पर वोल्टेज भिन्नता; 3) डंडे के जोड़े की संख्या को स्विच करना; 4) आपूर्ति वोल्टेज की आवृत्ति को बदलना, आदि।
रिओस्तात विनियमन
विनियमन की इस पद्धति में रक्तचाप को शामिल करने की योजना नीचे प्रस्तुत की गई है। रोस्टोरिक सर्किट में अतिरिक्त प्रतिरोध का परिचय देकर रिओस्टैटिक विशेषताओं को प्राप्त किया जाता है। बढ़ते प्रतिरोध के साथ एक ही समय में कठोरता एमएक्स घट जाती है।
इस विधि के साथ स्वीकार्य गति नियंत्रण सीमा
तब से, लगभग
![]() ,
,
जहां वेग में परिवर्तन की सापेक्ष परिमाण है; - पल में परिवर्तन के सापेक्ष परिमाण।
प्राप्त सूत्र से यह देखा जा सकता है कि कोणीय वेग और लोड टॉर्क के बराबर सापेक्ष विचलन, नियंत्रण सीमा। कोणीय वेग की कम सहिष्णुता के साथ, सीमा और भी छोटी है।
रैस्टोरैटिक नियमन के दौरान बिजली के नुकसान में परिवर्तनीय नुकसान होते हैं, जिसमें स्टेटर और रोटर कॉपर में नुकसान और रोटर सर्किट के बाहरी प्रतिरोधों में नुकसान और लोड से स्वतंत्र स्थायी नुकसान शामिल हैं। कुल स्थायी इंजन नुकसान लोड और इंजन की गति की परवाह किए बिना उसी के बारे में रहता है।
ई। के लिए विद्युत चुम्बकीय और यांत्रिक शक्ति
![]() ; ,
; ,
यहां से आप रोटर में नुकसान का निर्धारण कर सकते हैं
यह देखा जा सकता है कि नुकसान स्लिप की मात्रा के आनुपातिक हैं और इंजन के रोटर प्रतिरोधों के अनुपात और रोटर सर्किट में अतिरिक्त प्रतिरोध के अनुपात में वितरित किए जाते हैं, इसलिए, रैस्टोरैटिक विनियमन के साथ मोटर नाममात्र के बराबर एक टॉर्चर विकसित कर सकता है।
रिओस्टैटिक गति नियंत्रण के नुकसान कदम गति नियंत्रण और विनियमन के दौरान अतिरिक्त उपकरण, कम गति और बड़े ऊर्जा नुकसान का उपयोग हैं।
स्टेटर पर वोल्टेज को बदलकर रक्तचाप के कोणीय वेग का विनियमन
पहले हार्मोनिक की भयावहता में परिवर्तन के साथ, एक महत्वपूर्ण क्रिटिकल स्लिप के साथ महत्वपूर्ण क्षण का परिमाण बदल जाता है।
इस तरह के बदलाव को एक thyristor वोल्टेज कनवर्टर (ESRT) का उपयोग करके प्राप्त किया जाता है।
वोल्टेज के वर्ग के अनुपात में घटते वोल्टेज के साथ अधिकतम क्षण घटता है:
 ,
,
कम वोल्टेज पर महत्वपूर्ण क्षण कहां है; - कम वोल्टेज।
अंजीर से। यह देखा जा सकता है कि पंखे लोड के साथ भी गति नियंत्रण सीमा बहुत सीमित है।
सीमा का विस्तार करने के लिए, वे बंद-लूप एसीएस का उपयोग करते हैं, जिसका ब्लॉक आरेख अंजीर में दिखाया गया है। नीचे दिए गए। गति संवेदक (बीआर) और गति नियामक, जो सेट और वर्तमान गति मूल्य के बीच का अंतर प्राप्त करता है, इस SAR में नीचे आते हैं। स्पीड कंट्रोलर का आउटपुट पल्स-फ़ेज़ कंट्रोल सिस्टम के इनपुट पर लागू सिग्नल का उत्पादन करता है, जो ESR के लिए नियंत्रण दालों का उत्पादन करता है। इस तरह के विनियमन की ख़ासियत यह है कि सभी विशेषताओं को तुल्यकालिक गति के बिंदु पर अभिसरण किया जाता है, इसलिए इंजन की गति जितनी कम होती है, उतनी ही अधिक गति और नुकसान होता है। एक बंद एसएआर गति में चरण नियंत्रण के साथ इंजन की यांत्रिक विशेषताओं को अंजीर में दिखाया गया है। 5.11।
नियमन की इस पद्धति वाला इंजन लंबे समय तक काम कर सकता है, बशर्ते
नाममात्र को स्वीकार्य नुकसान की बराबरी करके स्वीकार्य क्षण पाया जा सकता है
![]() .
.
हीटिंग के लिए स्वीकार्य क्षण की वक्र चित्रा 5.11 में प्रस्तुत की गई है।
नियमन की यह विधि निरंतर लोड के साथ निरंतर संचालन में काम कर रहे तंत्र पर लागू नहीं की जा सकती। प्रभावी तंत्र के लिए चरण नियंत्रण का उपयोग है जिसमें स्थिर क्षण इंजन की गति पर निर्भर करता है, उदाहरण के लिए, प्रशंसकों, पंपों, कम्प्रेसर के ड्राइव के लिए। यह विधि तब भी लागू होती है जब इंजन परिचालन के पूरे चक्र के सापेक्ष कम समय के लिए कम गति से चल रहा हो, उदाहरण के लिए, लिफ्ट। इस मामले में, स्थापित इंजन शक्ति का overestimation छोटा है।
चरण नियंत्रण का लाभ बराबर शक्ति की आवृत्ति कनवर्टर (एफसी) की तुलना में कनवर्टर (एफएलसी) की कम लागत है, जो इन तंत्रों को अतिरिक्त लागत के बिना एक स्वीकार्य गुणवत्ता प्रक्रिया प्रदान करने की अनुमति देता है।
5.4.3। डंडे के जोड़े की संख्या बदलें
रक्तचाप के कोणीय वेग के लिए अभिव्यक्ति से:
![]() ,
,
यह देखा जा सकता है कि पोल जोड़े की संख्या को बदलकर गति नियंत्रण किया जा सकता है पीमोटर स्टेटर घुमावदार। चूँकि यह मान केवल पूर्णांक हो सकता है, गति नियंत्रण चरणवार है।
इस प्रकार के विनियमन के लिए KZR के साथ बहु-गति एचईएल बनाया जाता है। स्टेटर कोर के स्लॉट्स में या तो दो स्वतंत्र वाइंडिंग, या एक पोल-स्विचेबल रखा जाता है।
दो मुख्य स्विचिंग योजनाएं हैं। "स्टार / डबल स्टार" योजना (अंजीर। 5.12, I-II) एक निरंतर टोक़ के साथ विनियमन प्रदान करती है। ऐसी योजना को घूर्णी गति को बदलते समय एक निरंतर लोड टॉर्क के साथ इलेक्ट्रिक ड्राइव में उपयोग करने की सलाह दी जाती है। "स्टार / स्टार" स्कीम (Fig.5.12, I-III) भी पोल जोड़े की संख्या में दोहरा परिवर्तन करती है, हालांकि, विनियमन निरंतर शक्ति पर होता है, अर्थात, जब उच्च गति पर स्विच किया जाता है, तो टोक़ दो बार घट जाती है। ऐसी योजनाएं उन ड्राइव में उपयोग करने के लिए उचित हैं जहां प्रतिरोध का क्षण रोटेशन की आवृत्ति के विपरीत आनुपातिक है। प्लस में जोड़े के जोड़ बदलकर गति विनियमन में रक्तचाप की यांत्रिक विशेषताओं को प्रस्तुत किया गया है। नीचे दिए गए।
मल्टी-स्पीड एडी का व्यापक रूप से इलेक्ट्रिक ड्राइव में उपयोग किया गया है जो स्टेप वाइज रोटेशनल स्पीड कंट्रोल (एलेवेटर ड्राइव, पंखे, मशीन टूल्स) की अनुमति देता है। इस पद्धति का लाभ एक घूर्णी गति से दूसरे में संक्रमण में उच्च आर्थिक प्रदर्शन को बनाए रखना है, क्योंकि स्टेटर वाइंडिंग स्विचिंग के सभी स्तरों पर दक्षता और इंजन का पावर फैक्टर लगभग अपरिवर्तित रहता है। नुकसान में पारंपरिक एचईएल जटिलता, बड़े आयाम, अधिक लागत के साथ तुलना में अधिक शामिल हैं। इसके अलावा, स्टेटर वाइंडिंग को अलग-अलग संख्या में डंडों को स्विच करने की आवश्यकता होती है, जिससे स्विचिंग उपकरण की जटिलता की आवश्यकता होती है, जिससे संपूर्ण रूप से इलेक्ट्रिक ड्राइव की कीमत भी बढ़ जाती है। वर्तमान में, इस विधि को आवृत्ति विनियमन द्वारा दबाया जा रहा है।
अतुल्यकालिक मोटर गति की आवृत्ति नियंत्रण
रक्तचाप की गति को विनियमित करने की आवृत्ति विधि प्रचलित और बुनियादी है। इसका क्या कारण है? सबसे पहले, एसी मशीनों का सिद्धांत वर्तमान में विकसित किया गया है, जिसने बीपी नियंत्रण के कानूनों को खोजना संभव बना दिया है जो कुछ पदों से इष्टतम हैं। औद्योगिक इलेक्ट्रॉनिक्स के विकास ने "लोहा" में इन कानूनों को पूरी तरह से लागू करने की अनुमति दी है।
इसमें स्केलर, वेक्टर कंट्रोल सिस्टम और डायरेक्ट टॉर्क कंट्रोल सिस्टम हैं। नियंत्रण की विधि और सिद्धांत का विकल्प एक अतुल्यकालिक इलेक्ट्रिक ड्राइव के लिए स्थिर, गतिशील और ऊर्जा आवश्यकताओं के संयोजन से निर्धारित होता है।
आवृत्ति-नियंत्रित एसिंक्रोनस इलेक्ट्रिक ड्राइव के स्केलर नियंत्रण का सिद्धांत चर बीपी (वोल्टेज, चुंबकीय प्रवाह, फ्लक्स कपलिंग और मोटर सर्किट धाराओं) के मॉड्यूल की आवृत्ति और वर्तमान मूल्यों में परिवर्तन पर आधारित है। यह सिद्धांत इस तथ्य के कारण सबसे आम है कि यह माप की तकनीकी सादगी और रक्तचाप के चर के नियंत्रण के साथ-साथ खुली गति नियंत्रण प्रणालियों के निर्माण की संभावना है। मुख्य नुकसान गतिशील मोड में रक्तचाप के गति और गति को विनियमित करने वाले वांछित कानूनों को लागू करने की कठिनाई है।
वेक्टर नियंत्रण का सिद्धांत धमनी दबाव के चर के आवृत्ति और वर्तमान मूल्यों में परिवर्तन के साथ जुड़ा हुआ है, और ध्रुवीय या कार्टेशियन समन्वय प्रणाली में उनके वैक्टर के सापेक्ष अभिविन्यास के साथ। चर के कोणों की स्थिति को नियंत्रित करके, यह विधि स्थिर और गतिशील दोनों मोड में धमनी दबाव का पूर्ण नियंत्रण प्रदान करती है, जो स्केलर नियंत्रण की तुलना में ग्राहकों की गुणवत्ता में एक उल्लेखनीय सुधार देती है।
प्रत्यक्ष पल नियंत्रण प्रणाली वेक्टर नियंत्रण प्रणालियों का एक निरंतरता और विकास है। प्रत्यक्ष टोक़ नियंत्रण का कार्य इंजन की विद्युत चुम्बकीय टोक़ की तीव्र प्रतिक्रिया को नियंत्रित करने की क्रिया को सुनिश्चित करना है। वेक्टर नियंत्रण के विपरीत, जहां स्टेटर करंट पर अभिनय करके टॉर्क को बदला जाता है, डायरेक्ट टॉर्क कंट्रोल वाले सिस्टम में, स्टेटर का फ्लो कपलिंग एक नियंत्रित मात्रा है।
फ्रिक्वेंसी-नियंत्रित एचईएल के लिए डिज़ाइन किए गए फ़्रीक्वेंसी कन्वर्टर्स को डायरेक्ट फ़्रीक्वेंसी कन्वर्टर (एनएफसी) में पावर सप्लाई नेटवर्क के साथ कनेक्शन के प्रकार और डायरेक्ट या अल्टरनेटिंग करंट के इंटरमीडिएट लिंक के साथ टू-स्टेज फ़्रीक्वेंसी कन्वर्टर (एचआर फ़्रीक्वेंसी कन्वर्टर) के अनुसार विभाजित किया जाता है।
रक्तचाप का क्षण चुंबकीय प्रवाह के लिए आनुपातिक है और द्वितीयक धारा का सक्रिय घटक है:
![]() ,
,
जहां - रचनात्मक निरंतर रक्तचाप; - ईएमएफ और रोटर वर्तमान के बीच बदलाव का कोण;
 .
.
फिलहाल के सूत्र से यह देखा जा सकता है कि चुंबकीय प्रवाह में कमी, जो आवृत्ति में वृद्धि का परिणाम है, इससे वृद्धि होगी, और इसलिए रोटर में नुकसान होगा, और इंजन शीतलन की स्थिति के अनुसार स्वीकार्य मोटर टोर में एक साथ कमी होगी। एक निरंतर वोल्टेज आयाम के साथ आवृत्ति में कमी, जैसा कि खंड 4.3.3 में दिखाया गया था, मशीन के चुंबकीय प्रणाली की संतृप्ति स्थितियों के तहत भी अनुमेय नहीं है। इसलिए, इस शर्त के तहत आपूर्ति वोल्टेज की आवृत्ति को अलग करके मोटर की गति का विनियमन कि मोटर टोक़ स्थिर है केवल तभी स्वीकार्य है जब आपूर्ति वोल्टेज के आयाम को एक साथ बदल दिया जाता है, अर्थात, कानून से मुलाकात की जाती है, जो मोटर में लगभग निरंतर चुंबकीय प्रवाह को सुनिश्चित करता है।
नेटवर्क और मोटर के बीच निर्दिष्ट नियंत्रण कानून को लागू करने के लिए, एक आवृत्ति कनवर्टर (IF) चालू होता है, जो मोटर पर वोल्टेज की आवृत्ति और आयाम में एक साथ परिवर्तन प्रदान करता है। स्व-हवादार इंजनों के लिए कम गति पर, पर्यावरण को गर्मी हटाने में कमी आती है, इसलिए ऐसे मामलों में इंजन पर अनुमेय टोक़ को कम करना आवश्यक है।
जब बीयरिंग और रोटर तत्वों की यांत्रिक शक्ति के कारण कारणों के लिए आवृत्ति विनियमन, आवृत्ति को अधिक बढ़ाते हैं। इसलिए, गति नियंत्रण की मुख्य विधि वोल्टेज की आवृत्ति को कम करना है।
यांत्रिक विशेषताओं का एक अनुमानित रूप बनाने के लिए, हम मानते हैं कि, फिर महत्वपूर्ण क्षण के लिए समीकरण को इस प्रकार से फिर से लिखा जा सकता है:
 .
.
सूत्र से यह स्पष्ट है कि कानून के कार्यान्वयन में महत्वपूर्ण क्षण स्थिर रहता है। स्टेटर के सक्रिय प्रतिरोध की उपेक्षा की स्थिति उच्च इंजन गति पर सही है, जब। कम गति पर, स्टेटर के सक्रिय प्रतिरोध में वोल्टेज ड्रॉप स्टेटर टर्मिनलों पर वोल्टेज के साथ तुलनीय हो जाता है, जो मोटर की अधिभार क्षमता में गिरावट की ओर जाता है। कम गति के क्षेत्र में आवृत्ति विनियमन के साथ एक ही अधिभार क्षमता का एहसास करने के लिए, तथाकथित " आईआर मुआवजा», जो इस तथ्य में शामिल हैं कि कम गति पर स्टेटर पर वोल्टेज को जोड़ा जाता है, क्षतिपूर्ति।
ओपन सिस्टम में गति नियंत्रण की सीमा है। बंद प्रणालियों में, सीमा को महत्वपूर्ण रूप से विस्तारित किया जा सकता है।
आवृत्ति नियंत्रण के कार्यान्वयन में आने वाली मुख्य कठिनाइयाँ इस प्रकार हैं:
1) टीएफ-डीपीटी प्रणालियों के समान (या यहां तक कि बेहतर) गुणों को प्राप्त करने के लिए, आईएफ सिस्टम में, एडी के विभिन्न मापदंडों पर जानकारी प्राप्त करना आवश्यक है;
2) सिस्टम अत्यधिक गैर-रैखिक हैं और उच्च-गुणवत्ता वाले सिस्टम प्राप्त करने के लिए, उन लिंक को पेश करना आवश्यक है जो नियंत्रित वस्तु के गैर-रैखिकता के लिए क्षतिपूर्ति करते हैं;
3) कानून इष्टतम नहीं है, और मोटर शाफ्ट पर ध्यान में रखते हुए कानून के समायोजन की आवश्यकता होती है;
4) बीपी के पैरामीटर में मूल्य शामिल है, जो मशीन के संतृप्ति की डिग्री पर निर्भर करता है। इसके अलावा, स्टेटर और रोटर के सक्रिय प्रतिरोधों के मूल्य मोटर वाइंडिंग के तापमान में बदलाव के साथ बदलते हैं, जिसे भी ध्यान में रखा जाना चाहिए।
इन कठिनाइयों के बावजूद, आधुनिक आवृत्ति ड्राइव सफलतापूर्वक काम करते हैं, उच्च गुणवत्ता गति नियंत्रण प्रक्रिया प्रदान करते हैं।
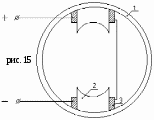
डीपीटी का सिद्धांत।मशीन में दो मुख्य भाग होने चाहिए: पहला भाग - एक चुंबकीय प्रवाह बनाता है, दूसरा भाग - जिसमें ईएमएफ प्रेरित होता है। डीसी मशीन में पहला हिस्सा तय हो गया है। स्टांप्ड पोल (2) को फ्रेम (1) पर बांधा जाता है, जिस पर फ़ील्ड वाइंडिंग स्थित है (3)। दूसरा भाग लंगर है। लंगर घूमता है। यह विद्युत स्टील शीट (4) से बना एक सिलेंडर है। आर्मेचर के बाहरी हिस्से में स्लॉट होते हैं जहां घुमावदार खंड (5) बिछाए जाते हैं। प्रत्येक अनुभाग कलेक्टर प्लेटों (6) से जुड़ा हुआ है। 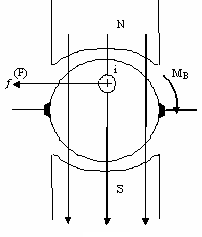
विद्युत चुम्बकीय क्षण फ्लक्स और आर्मेचर करंट पर निर्भर करता है। जनरेटर मोड में, विद्युत चुम्बकीय क्षण ब्रेक लगाना है। क्षणों के संतुलन की स्थिति के समीकरण को नीचे लिखा गया है, जहां जनरेटर शाफ्ट पर यांत्रिक क्षण, xx, विद्युत चुम्बकीय क्षण है। इलेक्ट्रिक ड्राइव की गति का मूल समीकरण। स्थापित प्रक्रिया जब ,,,, अगर। अगर, 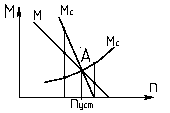
 गति नियंत्रण का सिद्धांत। गति नियंत्रण के संदर्भ में, डीसी मोटर सार्वभौमिक है। आप आर्मेचर सर्किट, प्रवाह और लागू वोल्टेज में प्रतिरोध को बदलकर गति को समायोजित कर सकते हैं। यह सूत्र से स्पष्ट है:।
गति नियंत्रण का सिद्धांत। गति नियंत्रण के संदर्भ में, डीसी मोटर सार्वभौमिक है। आप आर्मेचर सर्किट, प्रवाह और लागू वोल्टेज में प्रतिरोध को बदलकर गति को समायोजित कर सकते हैं। यह सूत्र से स्पष्ट है:।
लंगर श्रृंखला में प्रतिरोध।प्रतिरोध की शुरूआत से पहले और बाद में धाराओं के समीकरण
जहां से, यानी धाराओं, पल घटता है ()। उसी समय, गति कम हो जाती है। आर्मेचर के वेग में कमी के साथ बढ़ता है, और यह मूल आर्मेचर करंट तक पहुंच जाएगा, लेकिन कम गति पर। आर्मेचर सर्किट में प्रतिरोध के रोटेशन की आवृत्ति का विनियमन गति को कम करने की दिशा में है। 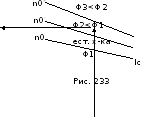
प्रवाह। प्रवाह के पहले और बाद में लंगर वर्तमान, उनके दृष्टिकोण। समीकरण 5.1. क्षणों। प्रवाह को कम करें, आर्मेचर करंट बढ़े, फिर, टोई (बढ़ता)।
वोल्टेज।गति नियंत्रण निम्नलिखित तरीकों से किया जाता है: ए) जनरेटर-मोटर सिस्टम (जीडी)। बी) थाइरिस्टर कनवर्टर-मोटर (टीपी-डी)। बी) पल्स चौड़ाई विनियमन।
 ए) सिस्टम जीडी, राइज ।34। । जनरेटर वीजी के उत्तेजना प्रवाह में वृद्धि करके, फ्लक्स E जी और ई जी में वृद्धि होती है, और इसलिए इंजन एंकर पर वोल्टेज बढ़ता है और गति बढ़ जाती है।
ए) सिस्टम जीडी, राइज ।34। । जनरेटर वीजी के उत्तेजना प्रवाह में वृद्धि करके, फ्लक्स E जी और ई जी में वृद्धि होती है, और इसलिए इंजन एंकर पर वोल्टेज बढ़ता है और गति बढ़ जाती है।
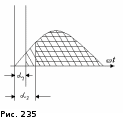
बी) थाइरिस्टर कनवर्टर-मोटर। नियंत्रण कोण में वृद्धि - अर्ध-अवधि क्षेत्र कम हो जाता है, वोल्टेज -U सीएफ का औसत मूल्य कम हो जाता है, और इसलिए रोटेशन की गति कम हो जाती है।
बी) पल्स चौड़ाई विनियमन।
नाड़ी का समय बदलने से t और कर्तव्य चक्र में परिवर्तन होता है, जहां t और नाड़ी का समय होता है; t p - समय रोकें। U cf = U 0 का औसत मूल्य। । 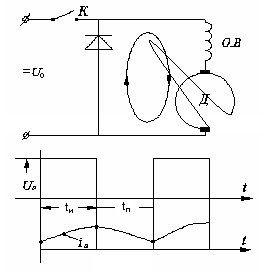
एक तुल्यकालिक जनरेटर की सक्रिय और प्रतिक्रियाशील शक्ति को नियंत्रित करने के तरीके। जैसा कि हमने अभी देखा है, यदि हम जनरेटर की उत्तेजना को बदलते हैं, तो हम इस तरह प्रतिक्रियाशील शक्ति को बदल देंगे, इसे दूर कर देंगे, या इसका उपभोग करेंगे। स्टीम टरबाइन, या हाइड्रो टरबाइन की ओर से यांत्रिक शक्ति को बदलकर केवल सक्रिय शक्ति को विनियमित करना संभव है। सक्रिय बिजली उत्पादन में वृद्धि के साथ, टर्बाइन से यांत्रिक शक्ति को बढ़ाना आवश्यक है।
एसडी शुरू करें। सिंक्रोनस मोटर को शुरू करने के लिए, एक बाहरी टोक़ का उपयोग करके अपने रोटर में तेजी लाने के लिए आवश्यक है कि तुल्यकालिक के करीब घूर्णी गति। एक तुल्यकालिक मोटर में टोक़ शुरू करने की कमी के कारण, इसे शुरू करने के लिए निम्नलिखित विधियों का उपयोग किया जाता है: 1 एक सहायक मोटर का उपयोग करना शुरू करें; 2Synchronous engine start।
1. एक सहायक इंजन का उपयोग करके एक तुल्यकालिक इंजन का स्टार्ट-अप केवल इसके शाफ्ट पर यांत्रिक भार के बिना किया जा सकता है, अर्थात। लगभग बेकार। इस मामले में, स्टार्ट-अप की अवधि के लिए, इंजन अस्थायी रूप से एक सिंक्रोनस जनरेटर में परिवर्तित हो जाता है, जिसके रोटर को एक छोटे सहायक इंजन द्वारा n = 0.95n 1 तक घुमाया जाता है। इस कनेक्शन की शर्तों के अनुपालन में इस जनरेटर का स्टेटर नेटवर्क के समानांतर में जुड़ा हुआ है। स्टेटर को नेटवर्क में चालू करने के बाद, एक छोटी शटर गति के साथ, फ़ील्ड वाइंडिंग को चालू किया जाता है, और मोटर को सिंक्रोनिज्म में खींचा जाता है, और सहायक ड्राइव मोटर को यंत्रवत् बंद कर दिया जाता है। शुरू करने का यह तरीका जटिल है और इसमें एक सहायक इंजन भी है।
2. स्टार्ट-अप के समय सिंक्रोनस मोटर अतुल्यकालिक हो जाती है। एक आउट-ऑफ-पोल मोटर के पोल के टुकड़ों के खांचे में अतुल्यकालिक शुरुआती टोक़ के गठन की संभावना के लिए, एक प्रारंभिक शॉर्ट-सर्किटिंग घुमावदार रखा गया है। एक सिंक्रोनस मोटर शुरू करने की प्रक्रिया दो चरणों में की जाती है। जब स्टेटर वाइंडिंग (1) को चालू किया जाता है, तो मोटर में एक घूर्णन क्षेत्र बनता है, जो शॉर्ट-सर्कुलेटेड रोटर वाइंडिंग में ईएमएफ को प्रेरित करता है। कार्रवाई के तहत, जो छड़ करंट में बहेगा। एक शॉर्ट-सर्कुलेटिंग वाइंडिंग में करंट के साथ एक घूर्णन चुंबकीय क्षेत्र की बातचीत के परिणामस्वरूप, एक अतुल्यकालिक मोटर के रूप में, एक टॉर्क उत्पन्न होता है। इस क्षण के कारण, रोटर शून्य (एस = 0.05), अंजीर के करीब एक पर्ची में तेजी लाता है। 313. यह पहला चरण समाप्त होता है। मोटर के रोटर के समकालिक होने के लिए, उत्तेजना वाइंडिंग में प्रत्यक्ष धारा (3) (कुंजी K को स्थिति 1 पर स्विच करके) को शामिल करके इसमें एक चुंबकीय क्षेत्र बनाना आवश्यक है। चूंकि रोटर को सिंक्रोनस के करीब गति के लिए त्वरित किया जाता है, स्टेटर के सापेक्ष क्षेत्र की गति और रोटर छोटा होता है। डंडे आसानी से एक दूसरे को खोज लेंगे। और फिसलन की एक श्रृंखला के बाद, विपरीत ध्रुवों को आकर्षित किया जाएगा, और रोटर को समकालिकता में खींचा जाएगा। उसके बाद, रोटर एक तुल्यकालिक गति से घूमेगा, और इसकी घूर्णी गति स्थिर, अंजीर होगी। 313. यह लॉन्च के दूसरे चरण को समाप्त करता है। अंडर-एक्साइटेड और अति-उत्साहित मोड में एसडी का काम (आईबी=
वर).
ऑपरेशन का तरीका पल की गति से मेल खाता है। पर। एक अंडर-एक्साइटेड सिंक्रोनस मोटर के साथ, वोल्टेज कंपोनेंट -E 0 एक करंट I से मेल खाता है, जो वोल्टेज Uc से कोण angle से पीछे होता है। वर्तमान I L का प्रतिक्रियाशील घटक वोल्टेज वेक्टर Uc से 90 0 से पिछड़ जाएगा, अर्थात। यह वर्तमान विशुद्ध रूप से आगमनात्मक है। इसका मतलब यह है कि जब उत्तेजित नहीं होता है, तो मोटर नेटवर्क से एक आगमनात्मक प्रवाह का उपभोग करेगा, और इसलिए नेटवर्क से प्रतिक्रियाशील शक्ति का उपभोग करेगा। 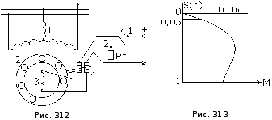
बढ़ते उत्तेजना के साथ, मूल्य -E 0 1 बढ़ता है, और वर्तमान मैं Ia = I 1 तक घट जाता है और न्यूनतम होगा। इस मोड में, एसडी cosφ = 1 के साथ काम करेगा और प्रतिक्रियाशील शक्ति का उपभोग नहीं किया जाएगा या नेटवर्क को नहीं दिया जाएगा। उत्तेजना की धारा में और वृद्धि के साथ, वोल्टेज का घटक होगा -E 0 11, और वर्तमान I 11 कोण the 1 द्वारा नेटवर्क के वोल्टेज वेक्टर से आगे होगा। यह मोड एक ओवरएक्स्ड मोड से मेल खाता है। वर्तमान का प्रतिक्रियाशील घटक कैपेसिटिव होगा (90 U द्वारा वेक्टर Uc से आगे)। यह मोड नेटवर्क पर प्रतिक्रियाशील शक्ति की वापसी के अनुरूप होगा। यह मोड नेटवर्क में स्थिर टैंकों को शामिल करने के समान है। 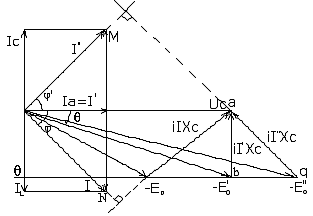
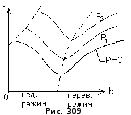
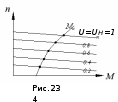
इसलिए हम देखते हैं कि यदि उत्तेजना वर्तमान iB को बदल दिया जाता है, तो स्टेटर वर्तमान I का मान परिमाण में और चरण में भिन्न होगा, अर्थात। आप cos can को समायोजित कर सकते हैं। यह मूल्यवान संपत्ति सिंक्रोनस मोटर्स के उपयोग को निर्धारित करती है। उत्तेजना वर्तमान ib पर स्टेटर वर्तमान I की निर्भरता, I = f (ib) को यू-आकार की विशेषताओं, अंजीर कहा जाता है। 309. पी 2\u003e पी 1। P = const पर वर्ण हटा दिए गए हैं। बिंदीदार रेखा से 0 तक उत्तेजना वर्तमान के अनुरूप ऑपरेशन का मोड उत्साहित नहीं है, और बिंदीदार रेखा के पीछे नेटवर्क में प्रतिक्रियाशील ऊर्जा की रिहाई के साथ अति-सक्रिय है।
कई मामलों में, तीन-चरण अतुल्यकालिक मोटर्स का उपयोग उन ड्राइव के लिए किया जाता है जिन्हें गति नियंत्रण की आवश्यकता नहीं होती है। लेकिन अतुल्यकालिक मोटर्स के मूल्यवान फायदे हैं: विश्वसनीयता, कम लागत, डिजाइन की सादगी, उच्च दक्षता और अपेक्षाकृत कम वजन। इन कारणों से, उन्हें चर गति ड्राइव के लिए लागू करना स्वाभाविक है।
शॉर्ट-सर्कुलेटेड रोटर के साथ अतुल्यकालिक मोटर्स की घूर्णी गति को विनियमित करने के लिए, आवृत्ति नियंत्रण पद्धति का आमतौर पर उपयोग किया जाता है, जो स्टेटर वाइंडिंग्स में वर्तमान आवृत्ति को समायोजित करके चुंबकीय क्षेत्र की रोटेशन गति का एक सुचारू नियंत्रण है, और घूर्णन चुंबकीय क्षेत्र के ध्रुवों के जोड़े की संख्या में परिवर्तन होता है, जिस पर चुंबकीय क्षेत्र में परिवर्तन होता है। छलांग लगाकर।
चरण-रोटर के साथ अतुल्यकालिक मोटर्स की घूर्णी गति को विनियमित करने के लिए, एक रिओस्टैटिक नियंत्रण विधि का उपयोग किया जाता है, जो अपने चरण वाइंडिंग के सक्रिय प्रतिरोध को बदलकर रोटर की पर्ची का एक सुचारू नियंत्रण है।
आवृत्ति नियमन। एक प्रेरण मोटर की घूर्णी गति को नियंत्रित करने का सबसे आशाजनक तरीका है स्टेटर एसी आवृत्ति नियंत्रणइंजन। घूर्णन क्षेत्र का कोणीय वेग n = 2 f / p है। इसलिए, जब वर्तमान आवृत्ति च को बदल दिया जाता है, तो क्षेत्र का कोणीय वेग आनुपातिक रूप से बदल जाता है। हालांकि, वर्तमान की आवृत्ति को विनियमित करते समय, वोल्टेज के एक साथ नियमन की आवश्यकता को ध्यान में रखना आवश्यक है। यह इस तथ्य के कारण है कि, अभिव्यक्ति (14.10) के अनुसार, चरण का ईएमएफ, और इसलिए आपूर्ति वोल्टेज, वर्तमान और प्रवाह की आवृत्ति के लिए आनुपातिक है। चूंकि प्रवाह को सभी मोड में समान रखा जाना चाहिए, इसलिए वोल्टेज आवृत्ति के अनुपात में (मशीन में वोल्टेज की बूंदों को ध्यान में रखे बिना) होना चाहिए। इसके अलावा, यह आवश्यक है ताकि जब इंजन की गति बदल जाए, तो इसका टॉर्क न बदले।
स्टेटर वाइंडिंग्स में करंट की आवृत्ति और उस पार वोल्टेज पर टॉर्क की निर्भरता की प्रकृति का आकलन करने के लिए, हम समीकरण में स्टेटर वाइंडिंग के सक्रिय प्रतिरोध (14.28) को अनदेखा करते हैं। जी एलऔर स्टेटर वाइंडिंग x pac 1 और रोटर x आरसी 2 के आगमनात्मक प्रतिरोध और पर्ची आवृत्ति (14.13) के लिए अभिव्यक्ति का उपयोग करें:
एमवीआर= = ए,
जहाँ एक= कास्ट।
इसलिए, टॉर्क को स्थिर रखने के लिए करंट की फ्रीक्वेंसी बदलते समय, स्टेटर पर वोल्टेज को आनुपातिक रूप से बदलना आवश्यक है; दूसरे शब्दों में, आवृत्ति को समायोजित करते समय मोटर टोक़ की स्थिरता बनाए रखने के लिए शर्त होगी यू 1 / एफ= कास्ट। यदि आप वर्तमान और वोल्टेज की आवृत्ति को समायोजित करते हैं, तो निर्दिष्ट स्थिति को देखते हुए, इंजन की यांत्रिक विशेषताएं कठोर रहेंगी, और अधिकतम टोक़ आवृत्ति से लगभग स्वतंत्र है (यह केवल अपेक्षाकृत कम आवृत्तियों पर काफी कम हो जाता है)। इसी समय, बिजली वर्तमान की आवृत्ति के अनुपात में भिन्न होगी, चूंकि पी 2 =एम पी आर। उदाहरण के लिए, जब करंट की आवृत्ति 2 गुना कम हो जाती है, तो शाफ्ट पर इंजन की शक्ति भी आधी हो जाती है।
डंडे के जोड़े की संख्या को बदलकर विनियमन। एक विस्तृत श्रृंखला में एक प्रेरण मोटर के कोणीय वेग में बदलाव एक प्रेरण मोटर की संरचना की लागत को जटिल बनाने और बढ़ाने की लागत पर संभव है - यह मोटर डंडे के जोड़े की संख्या को स्विच करके विनियमन है।
एक निरंतर नेटवर्क आवृत्ति पर, घूर्णन क्षेत्र का कोणीय वेग केवल इस क्षेत्र के ध्रुव जोड़े की संख्या पर निर्भर करता है, जिसे स्टेटर वाइंडिंग द्वारा निर्धारित किया जाता है। यदि स्टेटर पर दो अलग-अलग वाइंडिंग रखी जाती हैं - एक का गठन आरभाप बनाना और दूसरा बनाना पी "डंडे के जोड़े, फिर, पहली या दूसरी वाइंडिंग में प्लग करके, हमें फील्ड रोटेशन फ्रिक्वेंसी मिलती है:
एन 1 = 60 एफ / पी या एन "1 = 60 एफ / पी",इसलिए,
एन 1 / एन "1 = पी" / पी,
तदनुसार, इंजन की रोटर गति भी भिन्न होगी। इस मामले में, मोटर रोटर की विंडिंग को गिलहरी के पहिये की तरह किया जाना चाहिए।
इस मामले में स्टेटर वाइंडिंग्स के ध्रुवों की संख्या परस्पर असंबंधित है और इंजन ऑपरेटिंग परिस्थितियों के आधार पर किसी भी द्वारा चुना जा सकता है। विनियमन ही मोटर क्षेत्र के रोटेशन की आवृत्ति में अचानक परिवर्तन को उबालता है। लेकिन इलेक्ट्रिक ड्राइव की पूरी प्रणाली की जड़ता के कारण रोटर के रोटेशन की आवृत्ति अचानक नहीं बदल सकती है। स्विचिंग के बाद ही रोटर की गति में संबंधित परिवर्तन शुरू होता है।
इस संक्रमण प्रक्रिया को और अधिक स्पष्ट रूप से दिखाने के लिए, हम एक अतुल्यकालिक मशीन की दो यांत्रिक विशेषताओं का निर्माण करेंगे, जो ध्रुव युग्मों की एक चर संख्या के साथ होगी: एक विशेषता जो मेल खाती है आरडंडे के जोड़े, और दूसरा पी "= 1 पीडंडे के जोड़े (क्रमशः, अंजीर। 14.31, औरऔर ख)।मान लीजिए कि मोटर शाफ्ट पर टोक़ स्थिर रहता है क्योंकि क्षेत्र की गति बदल जाती है। उत्तरार्द्ध में वृद्धि के साथ, अर्थात् से संक्रमण के दौरान पी "को आरडंडे के जोड़े, इंजन पहली बार शुरू होने के करीब स्थितियों में बदल जाता है, और एक वर्तमान छलांग है।
लेकिन से जा रहा है आरको पी ", अर्थात्, जब क्षेत्र रोटेशन की आवृत्ति कम हो जाती है, तो मशीन पहले जनरेटर मोड की स्थितियों में प्रकट होती है और नेटवर्क को ऊर्जा देती है।
इस मोड का उपयोग कभी-कभी ड्राइव की त्वरित और किफायती ब्रेकिंग के लिए किया जाता है।
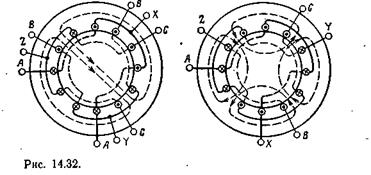
छोटे बिजली के इंजनों के लिए स्टेटर केवल दो अलग-अलग वाइंडिंग के साथ दिए जाते हैं; उच्च शक्ति की मोटरों के लिए, एक ही विंडिंग के कॉइल को अलग-अलग संख्या में पोल जोड़े प्राप्त करने के लिए स्विच करना अधिक समीचीन है। अंजीर में। 14.32 में दो-चार ध्रुवों से तीन चरण की घुमावदार स्विचिंग की योजना को दिखाया गया है। 1: 2 से अलग तरीके से वाइंडिंग को स्विच करने के लिए अधिक जटिल सर्किट परिवर्तन की आवश्यकता होती है और इसका उपयोग अक्सर कम किया जाता है।
ज्यादातर मामलों में, एक अतुल्यकालिक मशीन के स्टेटर को दो स्वतंत्र वाइंडिंग के साथ आपूर्ति की जाती है, जिनमें से प्रत्येक 1: 2 या दूसरे के अनुपात में स्विच करता है। इस प्रकार, इंजन में घूर्णी गति के चार चरण हैं, उदाहरण के लिए, 3000,\u003e 1500, 1000 और 500 आरपीएम।
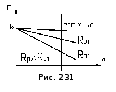
रिओस्तात विनियमन। चरण-रोटर के साथ तीन-चरण अतुल्यकालिक मोटर्स में, रोटर की गति को विनियमित करने की एक रिओस्टेट विधि का उपयोग किया जाता है। यह इंजन स्टार्ट (छवि 14.24) के दौरान एक समायोज्य तीन-चरण रिओस्टेट के रोटर के चरण वाइंडिंग के सर्किट में पेश करके प्राप्त किया जाता है। लेकिन इस रिओस्टेट को रोटर करंट के निरंतर भार के लिए डिज़ाइन किया जाना चाहिए, न कि अल्पकालिक एक के लिए, जैसे कि रिओस्टैट। रोटर सर्किट के सक्रिय प्रतिरोध को बढ़ाने से विशेषता बदल जाती है एम(s) - इसे नरम बनाता है (अंजीर देखें। 14.25)। अगर मोटर शाफ्ट पर एक निरंतर टोक़ में, रोस्टोर सर्किट के सक्रिय प्रतिरोध को धीरे-धीरे बढ़ाकर रिओस्टेट (आर पी 1) का प्रतिरोध बढ़ाएं< r p2< r р3), то рабочая точка будет смещаться с одной кривой एम (एस)अगले, रोटर सर्किट के बढ़े हुए प्रतिरोध के अनुरूप (चित्र। 14.25, अंक 1-4), तदनुसार, पर्ची बढ़ जाएगी और, परिणामस्वरूप, इंजन की गति कम हो जाएगी।
इस तरह, नाममात्र से रोटर की गति को पूर्ण विराम में बदलना संभव है। लेकिन विनियमन की इस पद्धति के साथ, अपेक्षाकृत बड़े ऊर्जा नुकसान अपरिहार्य हैं (देखें) 14.11)। घूमने वाले मैदान की शक्ति आर बीपी, पीरोटर वाइंडिंग के कंडक्टरों में बिजली के नुकसान के स्टेटर कोर (अंजीर देखें। 14.20) में ऊर्जा के नुकसान को छोड़कर (अंजीर में बराबर सर्किट देखें। 14.19);
P pr2 = r "B2 (I" 2) 2
और यांत्रिक शक्ति
पी फर = आर "बी 2 (आई" 2) 2।
रवैया
पी पीआर 2 / पी फर = एस / (एल-एस) = (एन 1) - p) / पी
यह दर्शाता है कि यांत्रिक शक्ति रोटर की गति में कमी के प्रत्यक्ष अनुपात में कम हो जाती है, जबकि एक ही समय में रोटर सर्किट के सक्रिय प्रतिरोध में बिजली हानि का हिस्सा बढ़ जाता है। इसलिए, इंजन की गति को कम करने के लिए, उदाहरण के लिए, 25%, एक सक्रिय प्रतिरोध के साथ एक रिओस्टेट जो जिसमें गर्मी में बदलना बेकार है, घूर्णन चुंबकीय क्षेत्र की ऊर्जा का एक चौथाई रोटर सर्किट में शामिल होना चाहिए। इस तरह के विनियमन का नुकसान तथ्य यह हो सकता है कि रोटर सर्किट में एक रिओस्टेट को शामिल करने से इंजन नरम हो जाता है, इसलिए, इसकी घूर्णी गति की स्थिरता कम हो जाती है। जब रिओस्तात चालू होता है, तो शाफ्ट पर लोड में छोटे बदलाव से इंजन की गति में महत्वपूर्ण परिवर्तन होता है।
![]()
इंजन की गति का विनियमन तकनीकी प्रक्रियाओं और उत्पादन तंत्र की आवश्यकताओं के अनुसार निर्धारित किया जाता है जिसमें उनका उपयोग किया जाता है। यह निम्नलिखित प्रमुख संकेतकों की विशेषता है।
रेगुलेशन रेंज डी (घूर्णी गति के परिवर्तन की सीमा)। यह मान अधिकतम इंजन की गति के अनुपात से लेकर उसकी न्यूनतम गति तक को दर्शाता है।
चिकना विनियमन, जो एक यांत्रिक विशेषता से दूसरे में स्विच करते समय इंजन की गति में न्यूनतम उछाल की विशेषता है।
इंजन की गति (नियंत्रण क्षेत्र) में संभावित बदलाव की दिशा।
नाममात्र ऑपरेटिंग परिस्थितियों (साधन की आपूर्ति की वोल्टेज और आवृत्ति) के तहत, इंजन में एक प्राकृतिक यांत्रिक विशेषता है। जब इसी विशेषताओं की गति को समायोजित करना प्राकृतिक से अलग होगा। इन विशेषताओं को कृत्रिम (समायोजन) विशेषताओं कहा जाता है। विनियमन के कुछ तरीकों की मदद से कृत्रिम विशेषताओं को प्राप्त करना संभव है, जो केवल प्राकृतिक एक के नीचे स्थित हैं। अन्य विधियां प्राकृतिक विशेषताओं के ऊपर और नीचे गति नियंत्रण प्रदान करती हैं। विनियमन की दक्षता समायोजन उपकरणों के निर्माण के लिए आवश्यक अतिरिक्त पूंजीगत व्यय, साथ ही साथ विनियमन के दौरान बिजली के नुकसान से निर्धारित होती है।
यह ध्यान दिया जाना चाहिए कि कुछ मामलों में, उदाहरण के लिए, ऐसे तंत्र जो कृत्रिम विशेषताओं पर अपेक्षाकृत कम समय के लिए काम करते हैं, बिजली की हानि, यहां तक कि अनौपचारिक नियंत्रण विधियों के साथ, छोटे होंगे (लिफ्ट, क्रेन आदि की कम परिष्करण गति पर काम करते हैं)। इसी समय, इंजन की गति को नियंत्रित करने के लिए सरल और सस्ते तरीकों का उपयोग करना अधिक तर्कसंगत है, भले ही यह ऊर्जा की खपत के मामले में अनौपचारिक हो।
समायोजन विशेषताओं पर इसके संचालन के दौरान इंजन का अनुमेय भार स्टेटर और रोटर सर्किट में धाराओं के परिमाण द्वारा सीमित है। यह भार इंजन के अनुमेय हीटिंग द्वारा निर्धारित किया जाता है और काफी हद तक उत्पादन तंत्र की यांत्रिक विशेषताओं, शाफ्ट पर प्रतिरोध का क्षण, इंजन और तंत्र की जड़ता का क्षण, आदि द्वारा निर्धारित किया जाता है।
अतुल्यकालिक मोटर्स के घूर्णी गति का विनियमन स्टेटर की तरफ से या रोटर की तरफ से इस पर प्रभाव के माध्यम से किया जा सकता है। सभी तीन तरीकों का व्यापक रूप से अभ्यास में उपयोग किया जाता है। इन तरीकों पर अधिक विस्तार से विचार करें।
बिजली की आपूर्ति की आवृत्ति को अलग करके गति नियंत्रण विनियमन का सबसे किफायती तरीका है और आपको ड्राइव की अच्छी यांत्रिक विशेषताओं को प्राप्त करने की अनुमति देता है। मुख्य आपूर्ति की आवृत्ति को बदलते समय, प्रेरण मोटर के चुंबकीय क्षेत्र के रोटेशन की आवृत्ति बदल जाती है। मोटर बिजली की आपूर्ति को आवश्यक आवृत्ति के साथ 50 हर्ट्ज के मानक नेटवर्क आवृत्ति के वोल्टेज में बदलना चाहिए। इसके साथ ही आवृत्ति के परिवर्तन के साथ, यांत्रिक विशेषता की उच्च कठोरता और इंजन की आवश्यक अधिभार क्षमता सुनिश्चित करने के लिए इंजन पर लागू वोल्टेज को एक निश्चित कानून के अनुसार विनियमित किया जाना चाहिए। मुख्य आपूर्ति की आवृत्ति को अलग करके अतुल्यकालिक मोटर्स की घूर्णी गति को समायोजित करते समय, ऑपरेशन के विभिन्न मोड प्रदान करना संभव है: एक निरंतर टोक़ के साथ; निरंतर शाफ्ट शक्ति के साथ; आवृत्ति के वर्ग के लिए आनुपातिक के साथ।
समायोज्य वोल्टेज और आवृत्ति के बीच संबंध, स्टेटर के सक्रिय प्रतिरोध के प्रभाव को ध्यान में रखते हुए, यांत्रिक विशेषताओं की कठोरता में परिवर्तन, स्टील संतृप्ति, मोटर रोटर के रोटेशन की कम आवृत्तियों पर गर्मी हस्तांतरण की गिरावट काफी जटिल है। एक बिजली स्रोत के रूप में बिजली की मशीनों, या अर्धचालक उपकरणों पर स्थिर आवृत्ति कन्वर्टर्स का उपयोग करके रोटरी ट्रांसड्यूसर का उपयोग किया जा सकता है, जो उद्योग द्वारा व्यावसायिक रूप से निर्मित होते हैं। आवृत्ति विनियमन की एक सकारात्मक विशेषता प्राकृतिक विशेषताओं के दोनों पक्षों के लिए एक विस्तृत श्रृंखला में चिकनी विनियमन की संभावना है (नाममात्र से अधिक आवृत्ति के साथ इंजन के संभावित रोटेशन सहित)। विशेषताओं की विनियमन कठोरता और उच्च पुनः लोड करने की क्षमता प्रदान की जाती है। हालांकि, कुछ मामलों में, धातु मशीनों, इलेक्ट्रिक स्पिंडल, हाई-पावर ब्लोअर और अन्य तंत्रों के ड्राइव में, आवृत्ति विनियमन सबसे स्वीकार्य है।
डंडे की संख्या को बदलकर गति विनियमन स्टेटर में चुंबकीय क्षेत्र के रोटेशन की आवृत्ति को बदलकर स्टेटर वाइंडिंग प्रदान की जाती है। मुख्य आपूर्ति की निरंतर आवृत्ति के साथ, चुंबकीय क्षेत्र के रोटेशन की आवृत्ति और इसके द्वारा निर्धारित रोटर के रोटेशन की आवृत्ति ध्रुवों की संख्या के साथ भिन्न होती है। चूंकि चरणों में निर्धारित ध्रुवों की संख्या, 2, 4, 6, 8, 10, 10, आदि के बराबर हो सकती है, जो कि 50 हर्ट्ज की आपूर्ति नेटवर्क की आवृत्ति के साथ 3000, 1500, 1000, 750, 600 के रोटेशन की एक तुल्यकालिक आवृत्ति से मेल खाती है। / मिनट, आदि, तो इस तरह से केवल चरणबद्ध विनियमन प्राप्त किया जा सकता है।
दो-गति एसिंक्रोनस इंजनों के अलावा, तीन-गति और चार-गति इंजन का उपयोग किया गया है। तीन-गति वाले इंजनों में एक स्विचेबल और एक नॉन-स्विचेबल वाइंडिंग होता है, और चार-स्पीड इंजनों में दो स्विटवेबल वाइंडिंग होते हैं, जो कि 3000/1500/1000-500 आरपीएम के लिए चार सिंक्रोनस रोटेशनल गति प्राप्त करने की अनुमति देते हैं। डंडे के जोड़े की स्विचिंग संख्या के साथ इंजन, एक नियम के रूप में, एक गिलहरी पिंजरे प्रकार घुमावदार के साथ एक शॉर्ट-सर्कुलेटेड रोटर है। ऐसा रोटर अपनी श्रृंखला में अतिरिक्त पुनर्संरचना के बिना काम करने की क्षमता प्रदान करता है। मल्टी-स्पीड इंजन में एक चरण रोटर के मामले में, स्टेटर और रोटर पर एक ही समय में स्विच करना आवश्यक होगा, जो रोटर के डिजाइन और ऐसी मशीनों के संचालन को जटिल करेगा। मल्टी-स्पीड एसिंक्रोनस मोटर्स के सकारात्मक संकेतकों में दक्षता और रोटर गति नियंत्रण की अपेक्षाकृत बड़ी रेंज शामिल है। विनियमन की इस पद्धति का नुकसान घूर्णी गति में एक चिकनी बदलाव की उपरोक्त असंभवता है।
जैसा कि कहा गया है, अतुल्यकालिक मोटर्स 4 ए के एक एकल सामान्य औद्योगिक श्रृंखला के ढांचे में, दो या तीन गति से संचालित करने के लिए डिज़ाइन किए गए मल्टी-स्पीड मोटर्स का एक संशोधन उत्पन्न होता है। पर्ची परिवर्तन द्वारा आवृत्ति नियंत्रण सबसे सरल नियंत्रण विधियों में से एक है। उसी समय, जैसे-जैसे पर्ची बढ़ती है (बढ़ती है), रोटर घुमावदार परिवर्तन (वृद्धि) में नुकसान होता है, जिससे विनियमन के दौरान दक्षता में कमी आती है।
पर्ची पर नियंत्रण स्टेटर की तरफ से और रोटर की तरफ से दोनों किया जा सकता है। स्वाभाविक रूप से, दूसरे मामले में, रोटर को चरण होना चाहिए और स्लिप के छल्ले के लिए घुमावदार होना चाहिए। जब स्टेटर के किनारे से समायोजित किया जाता है, तो इसके घुमावदार पर लागू वोल्टेज को बदल दिया जाता है। नाममात्र वोल्टेज से ऊपर वोल्टेज में वृद्धि से मोटर के चुंबकीय सर्किट की संतृप्ति होती है और इसलिए लागू नहीं होती है।
घूर्णी गति को नियंत्रित करने के लिए, आपूर्ति वोल्टेज को कम करें। इस मामले में, इंजन द्वारा विकसित किया गया टोक़ वोल्टेज के वर्ग के अनुपात में बदलता है और, तदनुसार, इंजन की यांत्रिक विशेषताओं में परिवर्तन होता है, जिसके परिणामस्वरूप कार्य पर्ची के मूल्य भी बदलते हैं। रोटर के किनारे से विनियमन करते समय, घूर्णी गति के रिओस्टाटिक विनियमन को मुख्य रूप से रोटर वाइंडिंग सर्किट में अतिरिक्त सक्रिय प्रतिरोधों (प्रतिरोधों) को लागू करके लागू किया जाता है। यह ध्यान रखना महत्वपूर्ण है कि विनियमन की इस पद्धति के साथ इंजन की गति की एक विस्तृत श्रृंखला में बदलाव अधिकतम (महत्वपूर्ण) टोक़ में परिवर्तन नहीं करेगा। इस प्रकार, विनियमन के दौरान इंजन की अधिभार क्षमता कम नहीं होती है।

"लगभग हर दिन, हमारे वैज्ञानिक, पृथ्वी की आंतों की खोज करते हैं, इसमें कोयले के सभी नए विशाल भंडार पाए जाते हैं, ...

Page 2 of 3 3. HV पर काम कर रहा है। 3.1.To दोषों की पहचान करें जो एक ओवरहेड ट्रांसमिशन लाइन और उनके समय पर होते हैं ...

प्रारंभिक क्षण: दो छात्र सामग्री पर रिपोर्ट तैयार करते हैं (3.4 (अतीत में उन्होंने कैसे जानकारी पारित की) और .53.5 ...

साधारण बिजली की लाइनें क्या हो सकती हैं? पावर ट्रांसमिशन टॉवर सबसे आम इंजीनियरिंग संरचनाओं में से एक हैं, और वे ...

सोप - सोप, एन। 1. किसी भी तरल में डूबा हुआ या डूबा हुआ और नरम, कुछ भी; विशेष रूप से, शोरबा में डूबा हुआ कुछ ... ... ...
एक मल्टीफ़ेज़ रिसीवर और आम तौर पर एक मल्टीफ़ेज़ सर्किट को सममित कहा जाता है यदि उनके पास जटिल प्रतिरोध होते हैं ...

12/15/2015 Sberbank में बिजली के लिए भुगतान करना ऑनलाइन बैंकिंग का उपयोग करने का सबसे आसान तरीका है। शुरुआत के लिए ...

Microsoft Excel द्वारा प्रदान की जाने वाली कई विशेषताओं में से, रेखा ग्राफ़ सुविधा विशेष रूप से उपयोगी है ...।

ज्ञान आधार में अपना अच्छा काम भेजें सरल है। छात्रों के नीचे दिए गए फ़ॉर्म का उपयोग करें ...

एलईडी फाइटोलैम्प - अंकुरित पौधों को उजागर करने का सबसे अच्छा विकल्प। यहां आपको मिलेंगे टिप्स ...
भेजा गया: भाग 1. स्थायी पर एक क्लासिक कम गति जनरेटर के निर्माण पर विस्तार से विचार किया ...

एम। टी। कलाश्निकोव के नाम पर IzhSTU के फ्रेशमेन महोत्सव के चौथे दिन ने पूरे विश्वविद्यालय को हिला दिया। 14 सितंबर को ...

विद्युत प्रतिष्ठानों में ऐसे पद होते हैं जब बिना विद्युत प्रवाह के विद्युत प्रवाह को चालू करना असंभव होता है ...।

आज लुमिनेन्सेंट के बिना बड़े ट्रेडिंग, शैक्षिक, कार्यालय और गोदाम परिसर की कल्पना करना मुश्किल है ...

मानक स्विच का संचालन करते समय, आप केवल लैंप की अधिकतम चमक प्राप्त कर सकते हैं। लेकिन वहाँ हैं ...

एसी पावर सर्किट में धाराओं को मापने के लिए वर्तमान ट्रांसफार्मर का उपयोग किया जाता है। वे के रूप में लागू कर रहे हैं ...