इंडक्शन सिस्टम इंस्ट्रूमेंट्स
इंडक्शन सिस्टम डिवाइस - इंस्ट्रूमेंट मेकिंग सेक्शन, ANALOG ELECTRIC MEASUREMENT DEVICES Design and Principles ...
अधिकांश ड्राइवों की पुरातन प्रकृति लंबे समय से स्पष्ट है और उन्नत डिजाइन विचार कई वर्षों से कुछ अन्य उन्नत लोगों के साथ धातु के उपकरणों में मौलिक ड्राइव को बदलने के कार्य पर काम कर रहे हैं। जैसा कि वे कहते हैं, सरल सरल है। और इस तरह के एक शानदार निर्णय मशीन फ़ीड ड्राइव के रूप में रैखिक मोटर्स का उपयोग करना था।
विद्युत चुम्बकीय प्रणाली रैखिक मोटर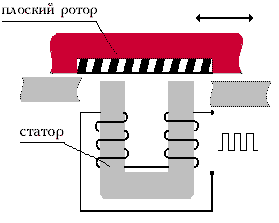
सफलता मिलने से पहले विभिन्न देशों में वैज्ञानिकों और डिजाइनरों के काम में कई साल लग गए। जापान में विशेष रूप से गहन कार्य किया गया था, जहां विद्युत चुम्बकीय ड्राइव (पहले से ही एक रैखिक ड्राइव) को पहली बार उच्च गति वाली गाड़ियों के लिए एक प्रस्तावक के रूप में सफलतापूर्वक इस्तेमाल किया गया था। धातु मशीनों के लिए रैखिक ड्राइव बनाने का भी प्रयास किया गया था, लेकिन उनके पास महत्वपूर्ण कमियां थीं: उन्होंने मजबूत चुंबकीय क्षेत्र बनाए, खुद को गर्म किया, और सबसे महत्वपूर्ण बात यह कि आरओ गति में एकरूपता सुनिश्चित नहीं की। नई सहस्राब्दी की दहलीज पर केवल मशीन टूल्स का सीरियल उत्पादन किया गया था (मुख्य रूप से विद्युत स्पार्क (ईडीएम) के लिए) मौलिक रूप से नई रैखिक मोटर्स के साथ शुरू होता है, जिसने अल्ट्रा गति के साथ मशीन टूल्स की एकसमान गति सुनिश्चित करने की सभी समस्याओं को हल किया, एक बड़ी गति नियंत्रण सीमा के साथ, विशाल त्वरण के साथ, तात्कालिक। रिवर्स, रखरखाव और कमीशनिंग में आसानी के साथ, आदि।
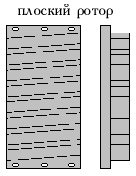
सिद्धांत रूप में, एलडी के डिजाइन में बहुत बदलाव नहीं हुआ है। दरअसल इंजन में केवल 2 (!) तत्व होते हैं: एक इलेक्ट्रोमैग्नेटिक स्टेटर और एक फ्लैट रोटर, जिसके बीच केवल एक हवा का गैप होता है। तीसरा अनिवार्य तत्व उच्च विसंगति (0.1 माइक्रोन) के साथ एक ऑप्टिकल या अन्य मापने वाला शासक है। इसके बिना, मशीन नियंत्रण प्रणाली वर्तमान निर्देशांक निर्धारित नहीं कर सकती है। स्टेटर और रोटर दोनों फ्लैट, आसानी से हटाने योग्य ब्लॉकों के रूप में बनाये जाते हैं: स्टेटर फ्रेम या मशीन के कॉलम, रोटर - वर्किंग बॉडी (पीओ) से जुड़ा होता है। रोटर प्राथमिक सरल है: इसमें आयताकार मजबूत (दुर्लभ-पृथ्वी) स्थायी मैग्नेट की एक श्रृंखला शामिल है। मैग्नेट विशेष उच्च शक्ति वाले सिरेमिक के एक पतले स्लैब पर तय किया जाता है, जिसका तापमान विस्तार गुणांक ग्रेनाइट की तुलना में दो गुना कम है। एक कुशल शीतलन प्रणाली के साथ सिरेमिक के उपयोग ने तापमान कारकों से जुड़े रैखिक ड्राइव, मजबूत चुंबकीय क्षेत्रों की उपस्थिति, संरचनात्मक कठोरता आदि की कई समस्याओं को हल किया।
गति और भार के आरओ की सटीक और समान आपूर्ति दो तकनीकी समाधानों द्वारा प्रदान की जाती है:
-एक निश्चित निश्चित कोण पर स्थाई चुम्बकों का बन्धन, जिसे दीर्घकालिक प्रयोगों के दौरान खोला गया था;
- अत्यधिक कुशल 6-चरण पल्स कंट्रोल सिस्टम (एसएमसी सिस्टम) का कार्यान्वयन।
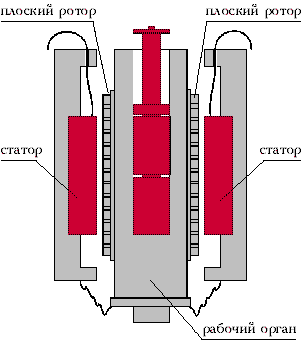
SODIK कंपनी ने अपने कारखानों में विशेषताओं के साथ LD की एक विस्तृत श्रृंखला के एक धारावाहिक उत्पादन का आयोजन किया: 100G से 2020 मिमी तक फ़ीड स्ट्रोक के साथ, 20G तक त्वरण के साथ PO / 180 मिनट तक अधिकतम गति के साथ (!!!) निर्दिष्ट आंदोलनों के निष्पादन की सटीकता के साथ !!! ऑपरेशन के सामान्य मोड में) 0.0001 मिमी (0.1 माइक्रोन) के बराबर है। ऑपरेशन के दौरान इन एलडी का ताप कमरे के तापमान से + 2 ° С से अधिक नहीं होता है। यह आरओ के लगभग तात्कालिक रोक, सीएनसी प्रणाली के आदेशों के लिए ड्राइव की रिवर्स, तात्कालिक प्रतिक्रिया प्रदान करता है, आदि। एक ही काम करने वाले निकाय (उदाहरण के लिए, शक्ति बढ़ाने के लिए) पर कई रैखिक मोटर्स लगाए जाते हैं। तो, विशेष रूप से, सभी ईई सिलाई मशीनों "सोडिक" के जेड अक्ष ड्राइव की व्यवस्था की जाती है।
जैसा कि उल्लेख किया गया है, स्टेटर और एलडी रोटर दोनों ही बेहद सरल हैं। स्टेटर एक आयताकार ब्लॉक के रूप में बनाया गया है और मशीन की सहायक संरचना के लिए कई बोल्ट के साथ बांधा गया है। ड्राइव अक्ष में Z - दो स्टेटर। वे ऊर्ध्वाधर राम के दोनों किनारों पर स्थित हैं। दो स्टेटर कूलिंग सिस्टम पाइप और पावर और कंट्रोल केबल प्रत्येक स्टेटर से जुड़े होते हैं। रोटर प्लेट को जंगम गाड़ी (PO) तक सख्ती से घुमाया जाता है। चूंकि जेड-एक्सिस ड्राइव में दो एलडी होते हैं, दो रोटार क्रमशः गाड़ी पर लगाए जाते हैं, प्रत्येक इसके स्टेटर के विपरीत होता है। विशेष गाइड और वायवीय प्रतिबाधा की प्रणाली लगभग बिना प्रयास के, गाड़ी यात्रा की असाधारण आसानी प्रदान करती है। भेदी मशीनों के एक्स, वाई कुल्हाड़ियों के साथ और एक्स, वाई, यू, वी ड्राइव में तार काटने वाली मशीनों के ड्राइव सरल हैं - इन सभी में एक एलडी है।
प्रिंट आउट लें
इलेक्ट्रिक ड्राइव
ऐतिहासिक रूप से, उद्योग किसी तरह से रैखिक स्थिति की समस्याओं को हल करने के लिए विभिन्न प्रकार के पेंच और बेल्ट ट्रांसमिशन या वायवीय तंत्र पर निर्भर करता है। लेकिन बढ़ती थ्रूपुट गति, लाखों कार्य चक्र, अनुकूलन और प्रोग्रामिंग लचीलेपन की बढ़ती मांग ने इन तंत्रों की कमियों का पता लगाया। अक्सर यह आवश्यक है कि अगर यह आगे की गति में सटीक नियंत्रित स्थिति की बात करता है।
हाल ही में, वायवीय actuator निर्माताओं ने इनमें से कुछ कठिनाइयों को हल करने के लिए बाहरी नियंत्रण वाल्व, स्थिति सेंसर और सर्वो इलेक्ट्रॉनिक्स के साथ वायवीय सिलेंडर नियंत्रण उपकरणों को अपडेट किया है। लेकिन घर्षण की उच्च गुणांक और संपीड़ित हवा की गतिशील चिपचिपाहट को देखते हुए, एक बंद पोजिशनिंग सिस्टम का निर्माण करना इतना आसान नहीं है। लोच और वायु घर्षण के साथ-साथ पिस्टन घर्षण के कारण प्रबंधन समस्याग्रस्त हो जाता है।
डायरेक्ट ड्राइव लीनियर मोटर की तकनीक पोजिशनिंग प्रॉब्लम को हल करने के लिए काफी बेहतर तरीका प्रदान करती है। इस तकनीक में बेल्ट, बॉल स्क्रू ड्राइव या अन्य मध्यवर्ती का उपयोग किए बिना विद्युत चुम्बकीय बल का प्रत्यक्ष अनुप्रयोग शामिल है। एक रैखिक एक्ट्यूएटर एक सीधा रैखिक आंदोलन पैदा करता है, और घूर्णी आंदोलन को एक ट्रांसलेशनल आंदोलन में परिवर्तित नहीं करता है।
एक रैखिक मोटर डिवाइस का वर्णन करने का सबसे आसान तरीका स्थायी मैग्नेट के साथ एक घूर्णी मोटर का प्रतिनिधित्व करना है, साथ में कट और विमान में बदल गया है। पारंपरिक रैखिक मोटर्स में बिल्कुल यह डिज़ाइन है।
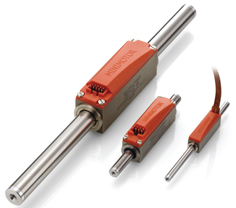
न्यू लीनियर मोटर्स, तथाकथित ट्यूबलर लीनियर एक्चुएटर, एक सॉलोनॉइड फॉर्म फैक्टर है।
इंजन स्वयं एक गैर-चुंबकीय स्टेनलेस स्टील आवास, तथाकथित गाड़ी के भीतर स्थित है। सेल्फ-सपोर्टिंग वाइंडिंग एक विशेष पॉलिमर सामग्री से बने सादे असर के साथ गाड़ी के अंदर स्थित होती है। घुमावदार के अंदर एक चल तत्व है - रॉड। रॉड स्टेनलेस स्टील से बना एक खोखला गैर-चुंबकीय सिलेंडर है, जिसमें गोलियों के रूप में छोटे अल्ट्रास्ट्रॉन्ग दुर्लभ-पृथ्वी मैग्नेट रखे गए हैं। जंगम छड़ इंजन का एक प्रमुख घटक है, यह पेटेंट डिज़ाइन का प्रतीक है, जो आपको इसकी पूरी लंबाई के साथ एक सटीक साइनसोइडल चुंबकीय क्षेत्र बनाने की अनुमति देता है। यह सुविधा पारंपरिक बाहरी स्थिति सेंसर के बजाय मोटर आवास में एकीकृत फीडबैक सेंसर के उपयोग की अनुमति देती है। यह महत्वपूर्ण है क्योंकि बाहरी रैखिक विस्थापन सेंसर अक्सर ड्राइव के रूप में लगभग उतना ही खर्च कर सकते हैं, इसके अलावा, वे स्वयं उच्च परिशुद्धता उपकरण हैं जिन्हें विशेष पर्यावरणीय परिस्थितियों, ठीक ट्यूनिंग और रखरखाव। इंटीग्रेटेड हॉल सेंसर गाड़ी के सुरक्षात्मक आवरण के नीचे इलेक्ट्रॉनिक बोर्ड पर स्थित हैं।
ट्यूबलर फॉर्म फैक्टर आश्चर्यजनक लाभ प्रदान करता है। यह डिज़ाइन गणितीय रूप से सही अभिविन्यास प्रदान करता है। चुंबकीय क्षेत्र कैरिज मोटर और चुंबकीय छड़ की विंडिंग के बीच। सभी चुंबकीय विद्युत लाइनें समकोण पर वर्तमान कंडक्टरों को पार करती हैं। यह अभिविन्यास आपको अधिकतम प्रयास और दक्षता बनाने की अनुमति देता है। बदले में उच्च दक्षता का अर्थ है उत्पन्न गर्मी की न्यूनतम मात्रा, जो ऑपरेटिंग चक्रों की संख्या को अधिकतम करती है।
रैखिक इलेक्ट्रिक मोटर को किसी भी तीन-चरण डीसी सर्वो चालक का उपयोग करके नियंत्रित किया जा सकता है, जिसमें पाप / कॉस फीडबैक इंटरफ़ेस भी है। फिर भी, सर्वश्रेष्ठ गतिशील प्रदर्शन केवल ड्राइवरों के उपयोग से प्राप्त किया जा सकता है जो विशेष रूप से रैखिक मोटर्स के साथ काम करने के लिए अनुकूलित हैं। विशेष रूप से, इस प्रकार के गति नियंत्रक कोपली कंट्रोल द्वारा पेश किए जाते हैं। 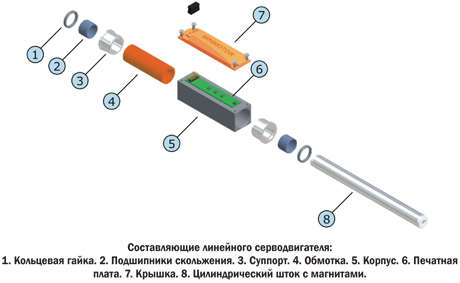
एक नियम के रूप में, घूर्णी गति को निम्न समाधानों द्वारा रूपांतरित किया जाता है:
- स्लाइडिंग नट पेंच
- बॉल पेंच (बॉल्स क्रू)
- गियर-रेक
- बेल्ट ड्राइव।
संक्षेप में इन परिवर्तनकारी संचरण पर विचार करें।
2.1। ट्रांसमिशन पेंच-अखरोट पर्ची: वे एक ड्राइव तंत्र हैं जिसका उपयोग पेंच के घूर्णी आंदोलन को अखरोट के ट्रांसलेशनल आंदोलन में परिवर्तित करने के लिए किया जाता है; घर्षण-पर्ची के सिद्धांत पर काम करता है।
लाभ: कम कीमत, अपरिवर्तनीय पाठ्यक्रम, उच्च विकसित बल।
नुकसान: एक नियम के रूप में, इस संचरण की प्रभावशीलता ड्राइव मोटर के प्रकार पर निर्भर करती है और लगभग 10–40% है; डिवाइस को पहनने और कभी-बढ़ते बैकलैश की विशेषता है; पेंच को साफ रखा जाना चाहिए, यहां तक कि छोटी मिट्टी की सफाई से सिस्टम की दक्षता या जाम में कमी हो सकती है।
2.2.गेंद शिकंजा: ऑपरेशन का सिद्धांत स्क्रू-नट ट्रांसमिशन के समान है, सिवाय इसके कि अखरोट में एक वक्रता प्रोफ़ाइल के स्क्रू खांचे होते हैं। खांचे गेंदों के लिए रेसवे के रूप में काम करते हैं जो पेंच और अखरोट के मोड़ के बीच चलते हैं। गेंद एक बंद प्रक्षेपवक्र के साथ चलती हैं - जब पेंच घुमाया जाता है, तो गेंदों को गति में खांचे के साथ खींचा जाता है, क्रमिक रूप से अखरोट को स्थानांतरित करता है और अतिप्रवाह चैनल के माध्यम से अपनी मूल स्थिति में लौटता है।
लाभ: संचरण की दक्षता बहुत अधिक है - 98% तक, एक लंबी सेवा जीवन, उच्च सटीकता और कम बैकलैश। नुकसान: उच्च लागत; बॉल्स क्रूज़ का उपयोग करते समय, मोटर के आउटपुट शाफ्ट पर प्रेरित महत्वपूर्ण अक्षीय भार को ध्यान में रखना आवश्यक है, परिणामस्वरूप, एक अतिरिक्त असर समर्थन के उपयोग की आवश्यकता होती है; जाम से बचने के लिए पेंच को भी साफ रखना चाहिए।
2.3.गियर रेक: गियर, मोटर शाफ्ट पर घूमते हुए, रैक रेल को चलाता है। लाभ: यह आर्थिक दृष्टि से काफी प्रभावी उपाय है, उन अनुप्रयोगों के लिए भी उपयुक्त है जहां एक बड़े विस्थापन की लंबाई, महान प्रयास और सटीकता की आवश्यकता होती है; संचरण क्षमता 95% तक पहुँच जाती है।
नुकसान: एक नियम के रूप में, डिजाइन में एक बैकलैश है, बैकलैश को कम करने के लिए, उच्च सटीकता के साथ संपर्क दांतों का उत्पादन करना या गियर और रैक के बीच डाउनफोर्स को बढ़ाना आवश्यक है, उच्च डाउनफोर्स इंजन या गियरबॉक्स के आउटपुट शाफ्ट पर बड़े रेडियल भार का कारण बनता है; जब गति होती है, तो गति का एक हल्का तरंग होता है; आंदोलन अपेक्षाकृत शोर है।
2.4.बेल्ट ड्राइव: शाफ्ट पर एक चरखी एक बेल्ट को घुमाती है जो लोड को एक रैखिक दिशा में ले जाती है।
 लाभ: सस्ती समाधान, सटीकता 50 माइक्रोन से बेहतर नहीं है।
लाभ: सस्ती समाधान, सटीकता 50 माइक्रोन से बेहतर नहीं है।
नुकसान: बेल्ट उच्च गति और भार पर पहनने के अधीन है; बेल्ट खिंचाव कर सकता है; कम बैकलैश के लिए उच्च स्तर के बेल्ट तनाव की आवश्यकता होती है, जो बदले में आउटपुट शाफ्ट पर रेडियल भार को बढ़ाता है।
रैखिक मोटरों के लिए, उन्होंने ऊपर वर्णित उपकरणों के लगभग सभी लाभों को अवशोषित कर लिया है और उनकी अधिकांश कमियों को समाप्त कर दिया है। उदाहरण के लिए, एक स्क्रू, नट और अन्य यांत्रिक घटकों की अनुपस्थिति रैखिक सर्वो कम शोर डिवाइस बनाती है। पहनने के अधीन तत्वों की अनुपस्थिति इंजन की सेवा जीवन को बढ़ाती है। उदाहरण के लिए, यदि आपको कम भार और उच्च गति पर उच्च पोजिशनिंग सटीकता की आवश्यकता है, तो रैखिक मोटर गेंद शिकंजा के साथ सर्वो ड्राइव की तुलना में अधिक लंबी सेवा जीवन प्रदान करने में सक्षम है। समान कारणों से, ट्यूबलर फॉर्म फैक्टर में रैखिक एक्ट्यूएटर जड़ता का अनुभव नहीं करते हैं, हिस्टैरिसीस और बैकलैश जैसे कारक अनुपस्थित हैं। परिणाम बेहतर गतिशील कठोरता है।
अंत में, ट्यूबलर रैखिक मोटर्स आज अपनी शारीरिक सीमा पर नहीं हैं। भविष्य के अनुप्रयोगों की आवश्यकताएं ड्राइव को लगातार कम करने और उनकी संवेदनशीलता को बढ़ाने की आवश्यकता पैदा करती हैं। इसलिए, इंजन की आकार सीमा लागत पर निर्भर करती है, मूलभूत भौतिकी पर नहीं।
3. फॉल्बर लीनियर सर्वमोटर्स
 अत्यधिक सटीक प्रोग्रामेबल लीनियर मोशन का एहसास करने के लिए, फुल्हाबर लीनियर सर्वमोटर्स की एक श्रृंखला प्रदान करता है।
अत्यधिक सटीक प्रोग्रामेबल लीनियर मोशन का एहसास करने के लिए, फुल्हाबर लीनियर सर्वमोटर्स की एक श्रृंखला प्रदान करता है।
ये कॉम्पेक्ट साइज़ (LM2070 इंजन - गाड़ी के वर्ग का 20 मिमी का हिस्सा और 70 मिमी की लंबाई) 27 एन तक की ताकतें विकसित करते हैं, दोनों को इंजन मोड में इस्तेमाल किया जा सकता है (गाड़ी तब चलती है जब शाफ्ट ठीक हो जाती है) और एक्चुएटर मोड में (शाफ्ट चाल, गाड़ी तय हो जाती है )। एकीकृत रैखिक हॉल सेंसर के लिए धन्यवाद, 120 माइक्रोन तक की सटीकता और 40 माइक्रोन तक की पुनरावृत्ति किसी बाहरी सेंसर के उपयोग के बिना प्राप्त की जा सकती है।
 रैखिक सर्वमोटर्स को ऑपरेशन के दौरान स्नेहन या किसी भी अतिरिक्त रखरखाव की आवश्यकता नहीं होती है, वे नीरव होते हैं, 3.2 m / s तक की गति और 198 m / s2 तक की गति तक पहुंचते हैं। फ़ॉल्बर रैखिक मोटर्स को विभिन्न स्टेम लंबाई के साथ पेश किया जाता है। संस्करण निर्माता के कॉम्पैक्ट नियंत्रकों के साथ-साथ साइन-कोसाइन प्रतिक्रिया के साथ काम करने के लिए उपलब्ध हैं, जिससे पीएलसी नियंत्रक की मदद से नियंत्रण को महसूस किया जा सकता है। इसके अलावा, कंपनी फौल्हबर, विशेष रूप से रैखिक मोटर्स के साथ काम करने के लिए गति नियंत्रकों की पेशकश करती है, जो पूर्ण रूप से रैखिक एक्टिलेटर के विन्यास और विन्यास की अनुमति देती है। वे स्वतंत्र रूप से प्रोग्राम करने योग्य हैं और RS-232 सीरियल इंटरफ़ेस और CAN नेटवर्क इंटरफ़ेस दोनों का समर्थन कर सकते हैं।
रैखिक सर्वमोटर्स को ऑपरेशन के दौरान स्नेहन या किसी भी अतिरिक्त रखरखाव की आवश्यकता नहीं होती है, वे नीरव होते हैं, 3.2 m / s तक की गति और 198 m / s2 तक की गति तक पहुंचते हैं। फ़ॉल्बर रैखिक मोटर्स को विभिन्न स्टेम लंबाई के साथ पेश किया जाता है। संस्करण निर्माता के कॉम्पैक्ट नियंत्रकों के साथ-साथ साइन-कोसाइन प्रतिक्रिया के साथ काम करने के लिए उपलब्ध हैं, जिससे पीएलसी नियंत्रक की मदद से नियंत्रण को महसूस किया जा सकता है। इसके अलावा, कंपनी फौल्हबर, विशेष रूप से रैखिक मोटर्स के साथ काम करने के लिए गति नियंत्रकों की पेशकश करती है, जो पूर्ण रूप से रैखिक एक्टिलेटर के विन्यास और विन्यास की अनुमति देती है। वे स्वतंत्र रूप से प्रोग्राम करने योग्य हैं और RS-232 सीरियल इंटरफ़ेस और CAN नेटवर्क इंटरफ़ेस दोनों का समर्थन कर सकते हैं।
4. रैखिक सर्वोमोटर डंकर्मोटरन
Dunkermotoren ServoTube रैखिक इमदादी मोटर्स दो संस्करणों में उपलब्ध हैं:
1. डायरेक्ट ड्राइव मोटर्स, जिसे एक्ट्यूएटर (इंजन की चलती रॉड) के मोड में काम को लागू करने के लिए डिज़ाइन किया गया है।
2. रैखिक सर्वो प्रणालियों के घटक जिन्हें OEM घटकों के रूप में उपयोग करने के लिए डिज़ाइन किया गया है और अतिरिक्त बीयरिंगों की स्थापना की आवश्यकता है। इस तरह के घटकों की मदद से एक निश्चित स्टेम के साथ सीधे गाड़ी पर लागू होने वाले भार के साथ इंजन के काम का एहसास करना संभव है।
 इंजन में एक एकीकृत स्थिति फीडबैक सेंसर शामिल है जो 12 माइक्रोन तक की पुनरावृत्ति प्रदान करता है। Dunkermotoren रैखिक इमदादी मोटर्स अतिरिक्त स्नेहन और अन्य रखरखाव की आवश्यकता के बिना लंबे उत्पाद जीवन को सुनिश्चित करने के लिए रैखिक बीयरिंग को एकीकृत करते हैं। ServoTube रैखिक इमदादी मोटरों की एक श्रृंखला में विकसित गति की सीमा 9.4 m / s और 586 मीटर / s2 तक की गति होती है। Actuators IP67 संरक्षण वर्ग की विशेषता है और 7 से 276 N लंबी अवधि के भार के साथ एक निरंतर कार्य बल विकसित करते हैं। सभी इंजन उद्योग के मानकों का अनुपालन करते हैं, जो उन्हें पहले से ही ऑपरेटिंग सिस्टम में जल्दी से शुरू करने की अनुमति देता है। वायवीय सिलेंडरों को बदलने के लिए रैखिक सहायक आधारित एक्ट्यूएटर्स को एकीकृत करने के लिए बड़ी संख्या में सामान की पेशकश की जाती है। इंजन के साथ एक पूर्ण सेट के लिए, इंजन निर्माता से विभिन्न नियंत्रक भी पेश किए जाते हैं।
इंजन में एक एकीकृत स्थिति फीडबैक सेंसर शामिल है जो 12 माइक्रोन तक की पुनरावृत्ति प्रदान करता है। Dunkermotoren रैखिक इमदादी मोटर्स अतिरिक्त स्नेहन और अन्य रखरखाव की आवश्यकता के बिना लंबे उत्पाद जीवन को सुनिश्चित करने के लिए रैखिक बीयरिंग को एकीकृत करते हैं। ServoTube रैखिक इमदादी मोटरों की एक श्रृंखला में विकसित गति की सीमा 9.4 m / s और 586 मीटर / s2 तक की गति होती है। Actuators IP67 संरक्षण वर्ग की विशेषता है और 7 से 276 N लंबी अवधि के भार के साथ एक निरंतर कार्य बल विकसित करते हैं। सभी इंजन उद्योग के मानकों का अनुपालन करते हैं, जो उन्हें पहले से ही ऑपरेटिंग सिस्टम में जल्दी से शुरू करने की अनुमति देता है। वायवीय सिलेंडरों को बदलने के लिए रैखिक सहायक आधारित एक्ट्यूएटर्स को एकीकृत करने के लिए बड़ी संख्या में सामान की पेशकश की जाती है। इंजन के साथ एक पूर्ण सेट के लिए, इंजन निर्माता से विभिन्न नियंत्रक भी पेश किए जाते हैं।
4.1। सुरक्षित रैखिक सर्वो मोटर्स का विशेष संस्करण
डंकर्मोटरेन सर्विमोटर्स की एक विशेष श्रृंखला मेकोट्रॉनिक उत्पाद है जो एक्ट्यूएटर मोड में काम करते हैं।
इस श्रृंखला के इंजन स्टेनलेस स्टील के मामले से प्रतिष्ठित हैं और इन्हें IP69K सुरक्षा वर्ग द्वारा दर्शाया गया है। इस श्रृंखला के इंजनों का जल शीतलन आपको 460 एन तक की शक्ति विकसित करने की अनुमति देता है। 10 माइक्रोन के एक संकल्प के साथ एक एनकोडर इंजन में एकीकृत होता है, जो 25 माइक्रोन की पुनरावृत्ति सुनिश्चित करता है। एक्चुएटर मोड (मूविंग रॉड)। मोटर तीन चरणों से संचालित होता है, आपूर्ति वोल्टेज 600 वी तक पहुंच सकता है। इसके लिए धन्यवाद, थर्ड पार्टी निर्माताओं से डंकरमोटरन और नियंत्रकों द्वारा दिए गए दोनों नियंत्रण इलेक्ट्रॉनिक्स का उपयोग करना संभव है।
4.2। रैखिक मोशन मॉड्यूल
 Dunkermotoren के लीनियर मोशन मॉड्यूल्स रेडी-टू-यूज़ हैं और सिस्टम द्वारा तैयार किए गए मेज़ट्रॉनिक सॉल्यूशंस में एकीकृत हैं। मॉड्यूल एक गाइड, सीमा स्विच, एक चेन लूप और अन्य संबंधित घटकों के साथ सुसज्जित डंकर्मोटरेन रैखिक सर्वोमोटर पर आधारित है। वैकल्पिक रूप से, मॉड्यूल उच्च सटीकता के साथ स्थिति की समस्याओं को हल करने के लिए 1 माइक्रोन तक के संकल्प के साथ एक रैखिक एनकोडर से सुसज्जित किया जा सकता है।
Dunkermotoren के लीनियर मोशन मॉड्यूल्स रेडी-टू-यूज़ हैं और सिस्टम द्वारा तैयार किए गए मेज़ट्रॉनिक सॉल्यूशंस में एकीकृत हैं। मॉड्यूल एक गाइड, सीमा स्विच, एक चेन लूप और अन्य संबंधित घटकों के साथ सुसज्जित डंकर्मोटरेन रैखिक सर्वोमोटर पर आधारित है। वैकल्पिक रूप से, मॉड्यूल उच्च सटीकता के साथ स्थिति की समस्याओं को हल करने के लिए 1 माइक्रोन तक के संकल्प के साथ एक रैखिक एनकोडर से सुसज्जित किया जा सकता है।
रेखीय गति के मॉड्यूल में 1 से 3 डिग्री की गतिशीलता हो सकती है जो हमेशा ग्राहक के टीएस के अनुसार व्यक्तिगत रूप से पूरी होती है। रैखिक सर्वोमोटर्स पर आधारित रैखिक गति मॉड्यूल का उपयोग बॉल स्क्रू और बेल्ट ड्राइव ड्राइव के लिए एक अच्छा विकल्प है। Dunkermotoren मॉड्यूल पैकेजिंग मशीनों और अन्य स्वचालित लाइनों में व्यापक रूप से उपयोग किया जाता है।
इल्या गेरासिमोव, माइक्रोड्राइव एलएलसी के इंजीनियर
LLC द्वारा प्रदान की गई तस्वीरें "माइक्रोड्राइव"
विज्ञापन
इलेक्ट्रिक ड्राइव
23.10.2017 कार्यक्षेत्र कुल्हाड़ी कुछ जोखिम पेश करती है, खासकर जब उनके नीचे सीधे काम करना अपरिहार्य है। इसलिए, मशीन टूल्स में विश्वसनीय सुरक्षा प्रदान करना आवश्यक है।
कैटोलिट्स्की निकिता अलेक्जेंड्रोविच
छात्र, इलेक्ट्रिक पावर संकाय, स्टावरोपोल राज्य कृषि विश्वविद्यालय, स्टावरोपोल, रूस
सार: लेख डिवाइस का वर्णन करता है, रैखिक मोटर्स के प्रकार, अन्य प्रकार के इलेक्ट्रिक मोटर्स से उनके अंतर, उपयोग, फायदे और नुकसान के बारे में विस्तार से वर्णन करते हैं। लेख का उद्देश्य दूसरों पर रैखिक मोटर्स के लाभों का वर्णन करना है।
कीवर्ड: रैखिक इलेक्ट्रिक मोटर, रोटर, स्टेटर, ड्राइव, एंकर, चुंबकीय कोर
काटोलिकिज निकिता अलेक्जेंड्रोविच
छात्र बिजली विभाग Stavropol राज्य कृषि विश्वविद्यालय Stavropol, रूस
यह उपकरण में विस्तार से वर्णित है। इस लेख का उद्देश्य दूसरों पर रैखिक इंजनों के उपयोग का वर्णन करना है।
कीवर्ड: रैखिक इलेक्ट्रिक मोटर, मोटर, रोटर, स्टेटर, ड्राइव, एंकर, चुंबकीय कंडक्टर
कई वर्षों के लिए, उद्योग विभिन्न बेल्ट और स्क्रू ट्रांसमिशन पर निर्भर है, साथ ही रैखिक स्थिति के प्रदर्शन के लिए आवश्यक वायवीय तंत्र भी है। हाई-स्पीड बैंडविड्थ, मल्टीपल वर्क साइकल, लचीले कॉन्फ़िगरेशन और प्रोग्रामिंग की मांग ने इन उपकरणों में कमियों की पहचान करना संभव बना दिया है। अक्सर, आगे के आंदोलन में सटीक, नियंत्रित स्थिति का प्रदर्शन करते समय, आपको समझौता करना पड़ता है।
प्रत्यक्ष ड्राइव की तकनीक के लिए धन्यवाद रैखिक मोटर ने रैखिक स्थिति की समस्याओं के लिए उच्च गुणवत्ता वाले समाधान प्राप्त किए। इस तकनीक में बेल्ट, बॉल-स्क्रू ट्रांसमिशन या किसी अन्य प्रकार के मध्यवर्ती लिंक के उपयोग के बिना विद्युत चुम्बकीय संपर्क के बल का प्रत्यक्ष उपयोग शामिल है। रैखिक ड्राइव प्रत्यक्ष रैखिक आंदोलन प्रदान करता है (घूर्णी गति का रूपांतरण में परिवर्तन नहीं होता है)।
चित्रा 1 - रैखिक मोटर डिवाइस
एक विद्युत रैखिक मोटर एक ऐसा तंत्र है जिसमें जंगम हिस्सा रोटेशन में नहीं होता है (पारंपरिक इंजन वेरिएंट में, जंगम भाग घूमता है), लेकिन रैखिक इकाई के निश्चित भाग के साथ चलता है, एक खुले चुंबकीय सर्किट के रूप में प्रतिनिधित्व किया जाता है, जिसकी लंबाई का एक मनमाना मूल्य होता है। चुंबकीय सर्किट के अंदर, एक रनिंग चुंबकीय क्षेत्र बनाया जाता है। मानक इलेक्ट्रिक मोटर्स में, रोटेटर और स्टेटर को रिंग के रूप में रोल किया जाता है, और एक रैखिक मोटर में इन तत्वों को स्ट्रिप्स तक बढ़ाया जाता है। इस तथ्य के कारण कि स्टेटर वाइंडिंग बारी-बारी से चालू होती है, एक रनिंग चुंबकीय क्षेत्र बनाया जाता है। रैखिक डीसी इलेक्ट्रिक मोटर में इसकी सतह पर स्थित एक घुमावदार के साथ एक लंगर शामिल होता है, जो एक कलेक्टर (मार्गदर्शक तत्व) होता है और एक खुला चुंबकीय सर्किट होता है जिसमें उत्तेजना वाइंडिंग (चलती भाग) इस तरह से व्यवस्थित होती है कि चुंबकीय ध्रुवों में दिखाई देने वाले बलों के वैक्टर की एक दिशा होती है । गतिमान भाग की गति को नियंत्रित करने में आसानी रैखिक विद्युत मोटर की एक विशिष्ट विशेषता है। समुच्चय प्रत्यावर्ती धारा तुल्यकालिक और अतुल्यकालिक प्रकार हो सकता है। एक अतुल्यकालिक रैखिक इलेक्ट्रिक मोटर में एक लंगर बार के रूप में बनाया जाता है, जो अक्सर आयताकार क्रॉस सेक्शन का होता है, जिसमें कोई घुमावदार नहीं होता है। आर्मेचर की स्थापना यूनिट के जंगम भाग के आंदोलन के मार्ग के साथ की जाती है, जो कि अनियंत्रित मल्टीफ़ेज़ वाइंडिंग्स के साथ एक चुंबकीय कोर से सुसज्जित है, जो एक वैकल्पिक चालू स्रोत से संचालित होता है। जंगम भाग के चुंबकीय कोर और आर्मेचर क्षेत्र के चुंबकीय क्षेत्र की बातचीत के परिणामस्वरूप, बलों को दिखाई देता है जो चल लंगर को तय लंगर के सापेक्ष तेजी से आगे बढ़ने का कारण बनता है। प्रक्रिया चलती भाग के वेग और यात्रा चुंबकीय क्षेत्र के समीकरण से पहले होती है।
सबसे अधिक बार, ऐसी इकाइयों का उपयोग विद्युत परिवहन के क्षेत्र में किया जाता है। इस प्रकार के इंजनों के विशेष फायदों से इसकी सुविधा मिलती है:
स्टेटर का आयताकार आंदोलन कई वाहनों के लिए महान है;
एक सरल डिजाइन, जिसमें कोई रगड़ तत्व नहीं होते हैं, अर्थात, चुंबकीय क्षेत्र के अंदर ऊर्जा प्रवाह सीधे यांत्रिक ऊर्जा में परिवर्तित हो जाता है। इसके कारण, यूनिट की उच्च दक्षता और विश्वसनीयता हासिल की जाती है;
कर्षण बल को क्लच से स्वतंत्रता पहिया सेट रेल की पटरियों के साथ। यह गुण मानक विद्युत कर्षण इकाइयों के लिए अप्राप्य है;
इलेक्ट्रिक वाहनों के पहियों को रस्सा करने की संभावना की कमी, जो एक रैखिक मोटर चुनने का कारण था;
परिवहन की गति का त्वरण और गति किसी भी मूल्य की हो सकती है, आंदोलन के आराम से, ट्रैक और सड़कों पर पहियों की स्वीकार्य रोलिंग गति, साथ ही वाहन चेसिस और ट्रैक की गतिशील स्थिरता की डिग्री।
विभिन्न उत्पादों के परिवहन तंत्र को चलाने के लिए अतुल्यकालिक रैखिक मोटर्स की आवश्यकता होती है। ये कन्वेयर रैखिक प्रणोदन प्रणालियों के स्टेटर के अंदर चलने वाले धातु बैंड से लैस हैं जो द्वितीयक तत्व का कार्य करते हैं। एक रैखिक मोटर प्रणाली के उपयोग के माध्यम से, बेल्ट पूर्व-तनाव की डिग्री कम हो जाती है, इसके फिसलन की संभावना समाप्त हो जाती है, और कन्वेयर की गति और विश्वसनीयता भी बढ़ जाती है।
रैखिक मोटर्स टक्कर मशीनों का उपयोग करते हैं, उदाहरण के लिए, पाइलिंग के लिए हथौड़े, जो सड़क के काम और निर्माण के क्षेत्र में आवश्यक हैं। रैखिक प्रणोदन प्रणाली के स्टेटर को हथौड़ा बांह पर रखा जाता है, और ऊर्ध्वाधर दिशा में उछाल के मार्गदर्शक तत्वों के साथ इसका आंदोलन एक चरखी द्वारा प्रदान किया जाता है। हथौड़ा का हथौड़ा प्रणोदन प्रणाली के माध्यमिक तत्व का कार्य करता है। हथौड़ा का हथौड़ा हिस्सा उठाने के लिए, इंजन को चालू किया जाता है ताकि रनिंग फ़ील्ड ऊपर की ओर निर्देशित हो। जब इफ़ेक्टर अपनी चरम ऊपरी स्थिति में पहुँच जाता है, तो इंजन निष्क्रिय हो जाता है और इफ़ेक्टर गुरुत्वाकर्षण के प्रभाव में ढेर की सतह पर चला जाता है। कभी-कभी इंजन निष्क्रियता उत्पन्न नहीं होती है - प्रभाव बल को बढ़ाते हुए प्रणोदन प्रणाली रिवर्स मोड में काम करती है। ढेर को गहरा करने की डिग्री के अनुसार, प्रणोदन के कारण प्रणोदन प्रणाली का स्टेटर नीचे की ओर बढ़ता है। इलेक्ट्रिक हथौड़ा का डिज़ाइन काफी सरल है। इसे बनाना काफी सरल है। इसके तत्वों के उत्पादन में वृद्धि की सटीकता की आवश्यकता नहीं है, और इसका डिज़ाइन तापमान संकेतकों में परिवर्तन के प्रति संवेदनशील नहीं है, क्योंकि डिवाइस तुरंत अपने कार्यों को करना शुरू कर सकता है।
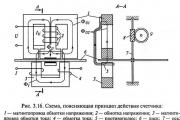
मैग्नेटोहाइड्रोडायनामिक पंप को रैखिक मोटर प्रणालियों के प्रकारों में से एक माना जाता है। इन उपकरणों का उपयोग विद्युत प्रवाहकीय तरल पदार्थों को पंप करने के लिए किया जाता है। इस तरह के पंपों का व्यापक रूप से उपयोग किया जाता है: परिवहन में परिवहन, खुराक, साथ ही तरल रूप में धातु के हस्तांतरण और परमाणु ऊर्जा संयंत्रों में तरल धातु शीतलक के हस्तांतरण के लिए धातु विज्ञान में।
मैग्नेटोहाइड्रोडायनामिक पंप दो प्रकार के होते हैं: प्रत्यक्ष और प्रत्यावर्ती धारा। पहले मामले में, सी-आकार का इलेक्ट्रोमैग्नेट एक प्राथमिक तत्व (स्टेटर) के रूप में कार्य करता है। इलेक्ट्रिक चुंबक के वायु अंतराल में तरल धातु के साथ पाइप लाइन को माउंट करें। पाइपलाइन की दीवारों को वेल्डेड इलेक्ट्रोड के लिए धन्यवाद, छोड़ दिया जाता है प्रत्यक्ष वर्तमान किसी बाहरी स्रोत से। ज्यादातर मामलों में, उत्तेजना घुमावदार इलेक्ट्रोड की एक श्रृंखला में प्रवेश करती है। जब एक विद्युत चुंबक उत्तेजित होता है, तो एक धातु जो उन क्षेत्रों में स्थित होती है, जिसके माध्यम से एक प्रत्यक्ष विद्युत प्रवाह विद्युत चुम्बकीय बल के अधीन होता है, एक बल के रूप में जो एक चुंबकीय क्षेत्र के क्षेत्र में स्थित एक करंट के साथ चालक पर कार्य करता है। इस बल के प्रभाव के परिणामस्वरूप, धातु पाइप लाइन के माध्यम से चलती है। एमएचडी पंपों के बीच प्रमुख अंतर चलती यांत्रिक तत्वों की अनुपस्थिति, साथ ही साथ धातु परिवहन चैनल को सील करने की संभावना है।
रैखिक मोटर प्रणालियों के लाभों में घूर्णन तत्वों की अनुपस्थिति शामिल है। नुकसान में कम ऊर्जा संकेतक शामिल हैं, इलेक्ट्रिक ड्राइव के मानक मॉडल की तुलना में, जिसे एक खुले विद्युत चुम्बकीय सर्किट और महत्वपूर्ण कामकाजी अंतराल द्वारा समझाया गया है। इसके अलावा, नुकसान उत्पादन की जटिलता और उच्च लागत हैं। रैखिक मोटर प्रणालियों का उपयोग गाड़ियों, उच्च गति वाले भूमि परिवहन के लिए किया जाता है, जो वाहनों के समूह से संबंधित होते हैं। एक मानक इकाई की दक्षता के सामान्य संकेतक और एक रैखिक इलेक्ट्रिक मोटर, इसके अनुकूलन के मामले में, उन मामलों में लगभग बराबर हैं जब कर्षण बल के संचरण के मध्यवर्ती लिंक को बाहर रखा गया है। समय के साथ, रैखिक इलेक्ट्रिक मोटर्स पारंपरिक ड्राइव को गियर के साथ विस्थापित कर देंगे।
संदर्भ:
रैखिक पीजोइलेक्ट्रिक इंजन के संचालन का सिद्धांत, अपेक्षाकृत बड़े घूमकर चलने वाले आंदोलन (कुछ मिलीमीटर या सेंटीमीटर) बनाते हैं, घूर्णन इंजन के संचालन के सिद्धांत से भिन्न नहीं होते हैं। अंजीर में। 6.4, और एक थरथानेवाला के साथ एक रैखिक मोटर का एक संरचनात्मक आरेख दिखाता है, जिससे अनुदैर्ध्य (पी) और झुकने (I) दोलन होते हैं। स्थिर वाइब्रेटर 1 को पहनने के लिए प्रतिरोधी गैस्केट के माध्यम से चल एफ 3 तक बल एफ द्वारा दबाया जाता है 2. जंगम हिस्सा एक स्टील पोजिशनर 3 है जो रोलर्स पर घूम रहा है। 4. यदि अनुदैर्ध्य और लचीले कंपन के चरणों का समन्वय किया जाता है ताकि वाइब्रेटर को बढ़ाया जाए, तो यह बाईं ओर के माध्यम से स्थितकर्ता को दबाया जाता है। गैसकेट तब पोजिशनर बाईं ओर चला जाएगा। जब वाइब्रेटर को छोटा किया जाता है, तो इसे सही गैसकेट के माध्यम से पॉजिशनर के खिलाफ दबाया जाता है और पोजिशनर बाईं ओर चलता रहता है। 180 ° के अनुदैर्ध्य दोलन चरण में परिवर्तन से स्थिति की वापसी गति होती है। उपरोक्त संरचनाओं के रैखिक पाईज़ोमोटर्स के लिए, विस्थापन संकल्प 1-10 माइक्रोन से अधिक नहीं है।
चित्र 6.4
उदाहरण के लिए, उपयोग किए जाने वाले कुछ सटीक तकनीकी प्रतिष्ठानों में, उदाहरण के लिए, एकीकृत सर्किट के निर्माण में, सैन्य कीट मिनी- और माइक्रोबोबॉट्स में, एक्चुएटर्स की आवश्यकता होती है जो दसवें या माइक्रोमीटर के सौवें हिस्से में जाते हैं। इस तरह के actuators यांत्रिक transducers के बिना काम कर रहे हैं, रैखिक piezoelectric micromovers के साथ नियंत्रित तनाव ट्रांसड्यूसर। इन इंजनों (छवि 6.4, बी) में, काम करने वाले आंदोलन को खुद पीजोइलेक्ट्रिक तत्व 2 की छड़ द्वारा किया जाता है, जिसे आमतौर पर एक साथ चिपके हुए पीज़ोकेमिकल वाशर के एक स्तंभ के रूप में किया जाता है। टर्मिनलों 1 और 3 रॉड के सिरों पर स्थित हैं। यदि आप क्लैंप 1 को ठीक करते हैं और पीज़ोइलेक्ट्रिक तत्व के इलेक्ट्रोड पर एक निरंतर वोल्टेज लागू करते हैं, जिससे पीज़ोइलेक्ट्रिक रॉड का विस्तार होता है, क्लैंप 3 के साथ रॉड का अंत दाईं ओर होता है। विस्थापन लागू वोल्टेज पर निर्भर करेगा। (5-7) * 10 -4 के बढ़ाव के साथ मिट्टी के पात्र का उपयोग करते समय, एक छड़ी 50 मिमी लंबे समय तक 25 माइक्रोन तक विस्थापन प्रदान कर सकती है।
इसी सिद्धांत पर, माइक्रोमीटर के अंशों में एक कदम के साथ रैखिक स्टेपर मोटर्स का निर्माण भी किया जा सकता है। रॉड के दाहिने छोर के बाद (छवि 6.4, बी) निर्दिष्ट चरण में चली गई है, क्लैंप 3 तय हो गई है, क्लैंप 1 जारी किया गया है, और पीज़ोइलेक्ट्रिक तत्व से तनाव को हटा दिया जाता है। रॉड मूल लंबाई के लिए संकुचित होता है, और इसके बाएं छोर को दाईं ओर खींचा जाता है। इसके बाद, क्लैंप 1 को फिर से तय किया जाता है, क्लैंप 3 जारी किया जाता है, और वोल्टेज को पीजोइलेक्ट्रिक तत्व पर लागू किया जाता है। नतीजतन, इंजन की चाल और संबंधित नियंत्रण ऑब्जेक्ट वांछित दूरी पर होता है। चरणों की आवृत्ति 30-50 हर्ट्ज है। इस तरह के एक स्टेपर मोटर का एक बहुत ही जटिल नोड प्रत्येक चरण पर क्लैंप को ठीक करने के लिए उपकरण है।
निष्कर्ष में यह घूर्णन और रैखिक पीज़ोमोटर्स के मुख्य फायदे और नुकसान को नोट किया जाना चाहिए। पीज़ोमोटर्स के सबसे महत्वपूर्ण लाभ, खासकर जब रोबोट और कंप्यूटर उपकरणों में उपयोग किए जाते हैं, वे निम्नलिखित हैं:
1. उच्च विस्थापन संकल्प: दोलन ट्रांसड्यूसर के मोड में 1-10 माइक्रोन तक और 0,01 माइक्रोन तक - ट्रांसड्यूसर्स के नियंत्रित विरूपताओं के उपयोग के साथ।
2. उच्च गति: त्वरण और मंदी का समय कुछ मिलीसेकंड है।
3. पीज़ोइलेक्ट्रिक मोटर्स में घर्षण बल के कारण आपूर्ति वोल्टेज को हटाते समय महत्वपूर्ण आत्म-ब्रेकिंग बल होता है।
4. पीज़ोमोटर्स की गति नियंत्रण सीमा 10 6 तक पहुंचती है।
पीजो मोटर्स को जटिल यांत्रिक घटकों में अच्छी तरह से एकीकृत (एकीकृत) किया जाता है और कंप्यूटर, टेप रिकार्डर, वीडियो रिकॉर्डर और सिने कैमरों के लिए सूचना पढ़ने और लिखने के लिए ड्राइव में उपयोग किया जाता है। रीड हेड को पोजिशन करने के लिए लीनियर पाईज़ोमोटर्स का उपयोग चुंबकीय डिस्क पर रिकॉर्डिंग घनत्व को 2-3 के कारक से बढ़ाने की अनुमति देता है।
लिंक के न्यूनतम कोणीय और रैखिक विस्थापन के साथ 5 डिग्री तक की स्वतंत्रता के पीजोइलेक्ट्रिक एक्ट्यूएटर्स से प्राप्त करने की संभावना सटीक स्वचालन और नियंत्रण प्रणालियों में उनके व्यापक आवेदन की संभावना को निर्धारित करती है। उदाहरण के लिए, खगोल विज्ञान में, अंतरिक्ष अनुसंधान में - जहां बहुत छोटी वस्तुओं के लिए सटीक अभिविन्यास की आवश्यकता होती है; आवेशित कणों के त्वरक में, जहां कण बीम को कड़ाई से सीमित ज्यामितीय निर्देशांक में रखना आवश्यक है; क्रिस्टलोग्राफिक अध्ययन में।
हालांकि, एक्चुएटर्स में पाईज़ोमोटर्स का उपयोग कई कठिनाइयों से जुड़ा हुआ है। इलेक्ट्रोड की आपूर्ति वोल्टेज पर कनवर्टर के गुंजयमान आवृत्ति की पर्याप्त निर्भरता, लोड का क्षण और मोटर शाफ्ट पर जड़ता का क्षण इष्टतम ऊर्जा रूपांतरण सुनिश्चित करना मुश्किल बनाता है। इंजन नियंत्रण की विशेषताएं अरेखीय हैं, परवलयिक हैं; काफी विस्तृत डेडबैंड है। यांत्रिक विशेषताएं काफी नरम हैं और हाइपरबोले की उपस्थिति है।
गति प्रतिक्रिया के साथ एक एक्ट्यूएटर प्रदर्शन करके इन कमियों का मुआवजा पूरा किया जा सकता है। प्रतिक्रिया को या तो प्रत्यक्ष रूप से टैकोगेनरेटर टाइप स्पीड मीटर का उपयोग करके महसूस किया जा सकता है, या अप्रत्यक्ष रूप से, इस तथ्य के आधार पर कि रोटर का कोणीय वेग इलेक्ट्रॉनिक कनवर्टर डिवाइस द्वारा खपत सक्रिय शक्ति के लिए आनुपातिक है। इसी समय, पीज़ोइलेक्ट्रिक तत्वों के उच्च-आवृत्ति बिजली स्रोतों को नियंत्रित करने के विशेष तरीकों का उपयोग करना आवश्यक है, जो कि पीज़ोइलेक्ट्रिक ट्रांसड्यूसर की विशेषताओं की महत्वपूर्ण गैर-रैखिकता और मोटर भाग के यांत्रिक और समायोजन विशेषताओं की गैर-रैखिकता के साथ, मजबूत यादृच्छिक गड़बड़ी के साथ स्थिर संचालन सुनिश्चित कर सकता है। अभ्यास में, गति को समायोजित या स्थिर करते समय आवश्यक स्थिर और गतिशील विशेषताओं को सुनिश्चित करने के लिए, निम्नलिखित लागू होते हैं:
सैद्धांतिक रूप से, पीजोइलेक्ट्रिक मोटर्स में बहुत उच्च शक्ति और ऊर्जा विशेषताएं हो सकती हैं, क्योंकि केवल पीजोइलेक्ट्रिक सिरेमिक कुछ मामलों में 90% से अधिक दक्षता के साथ विद्युत ऊर्जा को यांत्रिक ऊर्जा में परिवर्तित करता है। हालांकि, बाकी इंजन में बिजली की हानि इस तथ्य की ओर ले जाती है कि 10W तक की शक्ति वाले वास्तविक माइक्रोमीटर की दक्षता 10 - 25% से अधिक नहीं होती है।
पीज़ोमोटर्स के सीरियल उत्पादन और उपयोग को अच्छे पीज़ोकेरमिक और पहनने के लिए प्रतिरोधी सामग्री के उत्पादन की जटिलता से विवश किया जाता है। वर्तमान समय में, लगभग 10 डब्ल्यू के पीज़ोमोटर्स की शक्ति की एक सीमा इसके साथ जुड़ी हुई है। गति संचरण के दौरान संपर्क में भागों का तेजी से पहनना इंजन के जीवन को सीमित करता है।
हमारे लिए सामान्य रूप से आंतरिक दहन इंजन प्रारंभिक लिंक - पिस्टन, बनाते हैं। फिर यह आंदोलन एक क्रैंक तंत्र की मदद से, एक घूर्णी एक में बदल जाता है। कुछ उपकरणों में, पहले और अंतिम लिंक एक प्रकार का आंदोलन करते हैं।
उदाहरण के लिए, मोटर-जनरेटर में पहले प्रत्यावर्ती गति को घूर्णी एक में परिवर्तित करने की आवश्यकता नहीं होती है, और फिर, जनरेटर में, इस घूर्णी गति से एक सीधी रेखा के घटक को निकालें, अर्थात् दो विपरीत परिवर्तन करें।
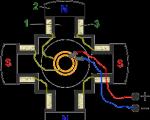
इलेक्ट्रॉनिक कनवर्टर तकनीक का आधुनिक विकास उपभोक्ता को एक रैखिक विद्युत जनरेटर के आउटपुट वोल्टेज को अनुकूलित करने की अनुमति देता है; इससे एक उपकरण बनाना संभव हो जाता है जिसमें एक बंद विद्युत सर्किट का हिस्सा चुंबकीय क्षेत्र में घूर्णी गति का प्रदर्शन नहीं करता है, लेकिन एक आंतरिक दहन इंजन के कनेक्टिंग रॉड के साथ-साथ घूमता है। एक पारंपरिक और रैखिक जनरेटर के संचालन के सिद्धांत की व्याख्या करने वाले आरेखों को अंजीर में दिखाया गया है। 1।
एक पारंपरिक जनरेटर में, एक चुंबकीय क्षेत्र में घूमने वाला एक तार फ्रेम और बाहरी प्रोपल्सर द्वारा संचालित वोल्टेज प्राप्त करने के लिए उपयोग किया जाता है। प्रस्तावित जनरेटर में, तार फ्रेम एक चुंबकीय क्षेत्र में रैखिक रूप से चलता है। यदि यह आंतरिक दहन इंजन का उपयोग करता है, तो यह छोटा और महत्वहीन अंतर, प्रोपल्सर को काफी सरल और सस्ता करना संभव बनाता है।
इसके अलावा, पिस्टन इंजन द्वारा संचालित पिस्टन कंप्रेसर में, इनपुट और आउटपुट लिंक प्रदर्शन करता है, अंजीर। 2।
क्रैंक तंत्र की कमी के कारण छोटे आयाम और वजन। एक क्रैंक तंत्र की कमी और केवल अनुदैर्ध्य भार की उपस्थिति के कारण विफलताओं के बीच उच्च समय। एक क्रैंक तंत्र की कमी के कारण कम कीमत। विनिमेयता - केवल गैर-श्रम-गहन संचालन, मोड़ और मिलिंग के कुछ हिस्सों के निर्माण के लिए आवश्यक हैं। इंजन को रोकने के बिना दूसरे प्रकार के ईंधन पर स्विच करने की संभावना।
स्पार्क प्लग को विद्युत वोल्टेज (करंट) की आपूर्ति के लिए एक पारंपरिक इंजन को दो शर्तों को पूरा करना होगा:
पहली स्थिति क्रैंक तंत्र के किनेमैटिक्स द्वारा निर्धारित की जाती है - पिस्टन को शीर्ष मृत केंद्र (प्रज्वलन अग्रिम को ध्यान में रखे बिना) होना चाहिए;
दूसरी स्थिति को थर्मोडायनामिक चक्र द्वारा निर्धारित किया जाता है - दहन कक्ष में दबाव, काम करने वाले चक्र से पहले, उपयोग किए गए ईंधन के अनुरूप होना चाहिए।
एक ही समय में दो शर्तों को पूरा करना बहुत मुश्किल है। जब हवा या कामकाजी मिश्रण को संकुचित किया जाता है, तो पिस्टन के छल्ले आदि के माध्यम से दहन कक्ष में संपीड़ित गैस का रिसाव होता है। धीमी गति से संपीड़न होता है (इंजन शाफ्ट धीमी गति से घूमता है), उच्च रिसाव। इस मामले में, काम करने वाले चक्र से पहले दहन कक्ष में दबाव, इष्टतम एक से कम हो जाता है और काम का चक्र गैर-इष्टतम परिस्थितियों में होता है। इंजन की दक्षता गिर जाती है। यही है, इंजन की उच्च दक्षता सुनिश्चित करने के लिए केवल उत्पादन शाफ्ट की घूर्णी गति की एक संकीर्ण सीमा में संभव है।
इसलिए, उदाहरण के लिए, स्टैंड पर इंजन की दक्षता लगभग 40% है, और वास्तविक परिस्थितियों में, कार पर, विभिन्न ड्राइविंग परिस्थितियों में, यह मान 10 ... 12% तक गिर जाता है।
एक रैखिक इंजन में कोई क्रैंक तंत्र नहीं होता है; इसलिए, पहली शर्त को पूरा नहीं करना पड़ता है, इससे कोई फर्क नहीं पड़ता कि काम के चक्र से पहले पिस्टन कहाँ स्थित है, काम के चक्र से पहले दहन कक्ष में केवल गैस का दबाव। इसलिए, अगर स्पार्क प्लग को एक इलेक्ट्रिकल वोल्टेज (करंट) की आपूर्ति पिस्टन स्थिति द्वारा नियंत्रित नहीं की जाती है, लेकिन दहन कक्ष में दबाव से, तो इंजन की आवृत्ति की परवाह किए बिना, काम चक्र (इग्निशन) हमेशा इष्टतम दबाव पर शुरू होगा। 3।
इस प्रकार, एक रैखिक मोटर के संचालन के किसी भी मोड में, हमारे पास क्रमशः कारनोट थर्मोडायनामिक चक्र का एक अधिकतम लूप क्षेत्र होगा, और विभिन्न इंजन ऑपरेटिंग मोड के साथ एक उच्च दक्षता होगी।
दहन कक्ष में दबाव का उपयोग करके इग्निशन नियंत्रण भी अन्य प्रकार के ईंधन "दर्द रहित" पर स्विच करने का अवसर प्रदान करता है। उदाहरण के लिए, एक उच्च-ऑक्टेन प्रकार के ईंधन से कम-ऑक्टेन प्रकार में स्विच करने पर, एक रैखिक इंजन में, आपको केवल इग्निशन सिस्टम को कमांड देने की आवश्यकता होती है ताकि स्पार्क प्लग को विद्युत वोल्टेज (करंट) की आपूर्ति कम दबाव में हो। एक पारंपरिक इंजन में, इसे पिस्टन या सिलेंडर के ज्यामितीय आयामों को बदलने की आवश्यकता होगी।
सिलेंडर में दबाव के इग्निशन नियंत्रण को पीजोइलेक्ट्रिक या कैपेसिटिव दबाव माप पद्धति का उपयोग करके लागू किया जा सकता है।
दबाव सेंसर एक वॉशर के रूप में बनाया गया है, जिसे सिलेंडर हेड माउंटिंग पिन, अंजीर के नट के नीचे रखा गया है। 3. संपीड़न कक्ष में गैस दबाव का बल, दबाव सेंसर पर कार्य करता है, जो सिलेंडर सिर को सुरक्षित रखने वाले अखरोट के नीचे स्थित है। और संपीड़न कक्ष में दबाव के बारे में जानकारी इग्निशन पल के नियंत्रण इकाई को प्रेषित की जाती है। एक दिए गए ईंधन के इग्निशन दबाव के अनुरूप कक्ष में एक दबाव के साथ, इग्निशन सिस्टम स्पार्क प्लग को एक विद्युत वोल्टेज (वर्तमान) की आपूर्ति करता है। दबाव में तेज वृद्धि के साथ, जो काम के चक्र की शुरुआत से मेल खाती है, इग्निशन सिस्टम के साथ विद्युत वोल्टेज (वर्तमान) को राहत देता है। पूर्व निर्धारित समय के बाद दबाव में वृद्धि की अनुपस्थिति में, जो एक काम चक्र की शुरुआत की अनुपस्थिति से मेल खाती है, इग्निशन सिस्टम इंजन स्टार्ट के लिए एक नियंत्रण संकेत बचाता है। इसके अलावा, सिलेंडर में प्रेशर सेंसर के आउटपुट सिग्नल का उपयोग इंजन की आवृत्ति और उसके निदान (संपीड़न की परिभाषा, आदि) को निर्धारित करने के लिए किया जाता है।
दहन कक्ष में दबाव के लिए संपीड़न का बल सीधे आनुपातिक है। प्रत्येक विपरीत सिलिंडर में दबाव के बाद सेट पॉइंट (इस्तेमाल किए गए ईंधन के प्रकार के आधार पर) से कम नहीं होता है, नियंत्रण प्रणाली दहनशील मिश्रण को प्रज्वलित करने के लिए एक आदेश जारी करती है। यदि किसी अन्य प्रकार के ईंधन पर स्विच करना आवश्यक है, तो निर्दिष्ट (संदर्भ) दबाव का मूल्य बदल जाता है।
इसके अलावा, दहनशील मिश्रण के प्रज्वलन के क्षण का समायोजन एक पारंपरिक इंजन की तरह, स्वचालित मोड में किया जा सकता है। सिलेंडर पर माइक्रोफोन - नॉक सेंसर लगा होता है। माइक्रोफ़ोन सिलेंडर बॉडी के यांत्रिक ध्वनि कंपन को एक विद्युत संकेत में परिवर्तित करता है। एक डिजिटल फ़िल्टर, साइन वेव वोल्टेज के इस सेट से, एक हार्मोनिक (साइन वेव) को विस्फोट मोड के अनुरूप निकालता है। जब इंजन में संबंधित विस्फोट के लिए फिल्टर आउटपुट में एक संकेत दिखाई देता है, तो नियंत्रण प्रणाली संदर्भ सिग्नल के मूल्य को कम कर देती है, जो दहनशील मिश्रण के प्रज्वलन दबाव से मेल खाती है। विस्फोट के अनुरूप सिग्नल की अनुपस्थिति में, नियंत्रण प्रणाली, थोड़ी देर के बाद, संदर्भ सिग्नल की भयावहता को बढ़ाती है, जो दहनशील मिश्रण के इग्निशन दबाव से मेल खाती है, जब तक कि विस्फोट से पहले आवृत्तियों दिखाई नहीं देती हैं। फिर से, विस्फोट से पहले होने वाली आवृत्तियों की घटना के साथ, सिस्टम संदर्भ संकेत को कम कर देता है, जो इग्निशन दबाव में कमी से होता है, एक ज्वलनशील प्रज्वलन के लिए। इस प्रकार, इग्निशन सिस्टम उपयोग किए जाने वाले ईंधन के प्रकार के लिए अनुकूल है।
एक रैखिक, साथ ही एक पारंपरिक आंतरिक दहन इंजन के संचालन का सिद्धांत, ईंधन-वायु मिश्रण के दहन से उत्पन्न होने वाली गैसों के थर्मल विस्तार और सिलेंडर में पिस्टन चालों को सुनिश्चित करने के प्रभाव पर आधारित है। कनेक्टिंग रॉड पिस्टन के रेक्टिलाइनियर रीक्रोसैटिंग मोशन को एक लीनियर इलेक्ट्रिक जनरेटर या पिस्टन कंप्रेशर तक पहुंचाता है।
अंजीर। 4, दो पिस्टन जोड़े होते हैं, एंटीपेज़ में काम करते हैं, जो इंजन को संतुलित करना संभव बनाता है। पिस्टन के प्रत्येक जोड़े को एक कनेक्टिंग रॉड द्वारा जोड़ा जाता है। कनेक्टिंग रॉड रैखिक बीयरिंग पर निलंबित है और जनरेटर आवास में पिस्टन के साथ स्वतंत्र रूप से दोलन कर सकता है। पिस्टन को आंतरिक दहन इंजन के सिलेंडर में रखा जाता है। प्री-एडमिशन चैंबर में बनाए गए थोड़े से ओवरपेक्चर की कार्रवाई के तहत, पाइरेज पोर्ट के माध्यम से सिलेंडर को शुद्ध किया जाता है। कनेक्टिंग रॉड पर जनरेटर मैग्नेटिक सर्किट का मूवेबल पार्ट होता है। उत्तेजना घुमावदार उत्पन्न करने के लिए आवश्यक चुंबकीय प्रवाह बनाता है विद्युत प्रवाह। कनेक्टिंग रॉड के घूमते हुए आंदोलन के दौरान, और इसके साथ चुंबकीय सर्किट का हिस्सा, उत्तेजना घुमावदार द्वारा बनाई गई चुंबकीय प्रेरण लाइन, जनरेटर के स्थिर बिजली घुमावदार को बाधित करता है, इसमें विद्युत वोल्टेज और वर्तमान (एक बंद विद्युत सर्किट के साथ) को प्रेरित करता है।
|
|
| अंजीर। 4। |
लाइन कंप्रेसर, अंजीर। 5, एंटीपेज़ में काम करने वाले दो पिस्टन जोड़े होते हैं, जो इंजन को संतुलित करना संभव बनाता है। पिस्टन के प्रत्येक जोड़े को एक कनेक्टिंग रॉड द्वारा जोड़ा जाता है। कनेक्टिंग रॉड रैखिक बीयरिंग पर निलंबित है और स्वतंत्र रूप से आवास में पिस्टन के साथ दोलन कर सकता है। पिस्टन को आंतरिक दहन इंजन के सिलेंडर में रखा जाता है। प्री-एडमिशन चैंबर में बनाए गए थोड़े से ओवरपेक्चर की कार्रवाई के तहत, पाइरेज पोर्ट के माध्यम से सिलेंडर को शुद्ध किया जाता है। कनेक्टिंग रॉड के घूमते हुए आंदोलन के दौरान, और इसके साथ कंप्रेसर पिस्टन, दबावयुक्त हवा को कंप्रेसर रिसीवर को आपूर्ति की जाती है।
|
|
| अंजीर। 5. रैखिक कंप्रेसर। |
इंजन में ड्यूटी चक्र दो चक्रों में किया जाता है।
2. आघात का प्रकोप। जब पिस्टन शीर्ष मृत केंद्र के पास स्थित होता है, तो स्पार्क प्लग से एक इलेक्ट्रिक स्पार्क द्वारा संपीड़ित कामकाजी मिश्रण को प्रज्वलित किया जाता है, जिसके परिणामस्वरूप गैसों का तापमान और दबाव तेजी से बढ़ता है। गैसों के थर्मल विस्तार की कार्रवाई के तहत, पिस्टन निचले मृत केंद्र में चला जाता है, जबकि विस्तार गैसें उपयोगी कार्य करती हैं। उसी समय, इनलेट कक्ष में पिस्टन एक उच्च दबाव बनाता है। दबाव में, वाल्व बंद हो जाता है, इस प्रकार हवा को अंतर्ग्रहण में प्रवेश करने से रोकता है।
सिलेंडर में काम कर रहे स्ट्रोक पर, अंजीर। 6 काम स्ट्रोक, दहन कक्ष में दबाव की कार्रवाई के तहत पिस्टन, तीर द्वारा इंगित दिशा में चलता है। प्री-चेंबर में ओवरपेक्चर की कार्रवाई के तहत, वाल्व बंद हो जाता है और सिलेंडर को हवादार करने के लिए हवा को संपीड़ित किया जाता है। जब पिस्टन (संपीड़न के छल्ले) शुद्ध बंदरगाहों तक पहुंचते हैं, तो अंजीर। 6 वेंटिलेशन, दहन कक्ष में दबाव तेजी से गिरता है, और फिर कनेक्टिंग रॉड के साथ पिस्टन जड़ता से चलता है, अर्थात, जनरेटर के चलती हिस्से का द्रव्यमान एक पारंपरिक इंजन में एक चक्का की भूमिका निभाता है। इसी समय, प्री-इनलेट चैंबर में शुद्ध खिड़कियां और संपीड़ित हवा पूरी तरह से एक दबाव अंतर (पूर्व-आउटलेट कक्ष और वायुमंडलीय दबाव में दबाव) की कार्रवाई के तहत खुलती हैं, जो सिलेंडर के माध्यम से उड़ती है। इसके अलावा, विपरीत सिलेंडर में एक कार्य चक्र के दौरान, एक संपीड़न चक्र किया जाता है।
जब पिस्टन संपीड़न मोड में चलता है, तो अंजीर। 6, पिस्टन शुद्ध बंदरगाहों को बंद कर देता है, तरल ईंधन का इंजेक्शन बाहर किया जाता है, इस समय दहन कक्ष में हवा संपीड़न चक्र की शुरुआत के थोड़े अतिरिक्त दबाव में है। आगे के संपीड़न के साथ, जैसे ही संपीड़ित दहनशील मिश्रण का दबाव संदर्भ दबाव (इस प्रकार के ईंधन के लिए निर्दिष्ट) के बराबर हो जाता है, स्पार्क प्लग इलेक्ट्रोड में विद्युत वोल्टेज लागू किया जाएगा, मिश्रण प्रज्वलित किया जाएगा, काम करने का चक्र शुरू होगा और प्रक्रिया दोहराई जाएगी। इस मामले में, आंतरिक दहन इंजन केवल दो समाक्षीय और विपरीत रूप से रखे गए सिलेंडर और पिस्टन होते हैं, जो यंत्रवत् रूप से जुड़े होते हैं।
रैखिक विद्युत जनरेटर के ईंधन पंप की ड्राइव पंप पिस्टन रोलर और पंप हाउसिंग रोलर, अंजीर के बीच एक कैम सतह सैंडविच है। 7. कैम सरफेस आंतरिक दहन इंजन की कनेक्टिंग रॉड के साथ-साथ घूमता है, और पिस्टन के रोलर्स को धक्का देता है और प्रत्येक स्ट्रोक पर पंप करता है, जबकि पंप पिस्टन पंप सिलेंडर के सापेक्ष चलता है और ईंधन भाग को संपीड़न चक्र की शुरुआत में ईंधन इंजेक्शन नोक से हटा दिया जाता है। यदि एक झटके के दौरान उत्सर्जित ईंधन की मात्रा को बदलना आवश्यक है, तो कैम की सतह अनुदैर्ध्य अक्ष के सापेक्ष घुमाई जाती है। जब कैम की सतह अनुदैर्ध्य अक्ष के सापेक्ष घूमती है, तो पंप पिस्टन रोलर्स और पंप हाउसिंग रोलर्स अलग-अलग दूरी पर (रोटेशन की दिशा के आधार पर) अलग-अलग या स्थानांतरित होंगे, ईंधन पंप का पिस्टन स्ट्रोक बदल जाएगा और प्रोपेल्ड ईंधन का हिस्सा बदल जाएगा। अपनी धुरी के चारों ओर घूमते हुए घूमने वाले कैम को एक निश्चित शाफ्ट की मदद से बाहर किया जाता है, जो एक रैखिक असर के माध्यम से कैम के साथ संलग्न होता है। इस प्रकार, कैम पीछे और आगे बढ़ता है, और शाफ्ट स्थिर रहता है। जब शाफ्ट अपनी धुरी के चारों ओर घूमता है, तो कैम सतह अपनी धुरी के चारों ओर घूमती है और ईंधन पंप का स्ट्रोक बदल जाता है। शाफ्ट ईंधन इंजेक्शन के हिस्से को बदलता है, एक स्टेपर मोटर या मैन्युअल रूप से संचालित होता है।
एक रैखिक कंप्रेसर के ईंधन पंप की ड्राइव भी पंप कैमर के विमान और पंप आवरण, अंजीर के विमान के बीच clamped एक कैम सतह है। 8. कैम सतह आंतरिक दहन इंजन के गियर शाफ्ट के साथ एक घूमने वाला घूर्णी आंदोलन करता है, और प्रत्येक स्ट्रोक पर पिस्टन और पंप विमानों को धक्का देता है, जबकि पंप पिस्टन पंप सिलेंडर के सापेक्ष चलता है और ईंधन के एक हिस्से को संपीड़न इंजेक्शन की शुरुआत में ईंधन इंजेक्शन नोजल से बाहर निकाल दिया जाता है। । एक रैखिक कंप्रेसर का संचालन करते समय, बाहर धकेलने वाले ईंधन की मात्रा को बदलने की कोई आवश्यकता नहीं है। एक रैखिक कंप्रेसर का संचालन केवल एक रिसीवर के साथ संयोजन में होता है - एक ऊर्जा भंडारण उपकरण जो अधिकतम भार की चोटियों को चिकना कर सकता है। इसलिए, रैखिक कंप्रेसर मोटर को केवल दो मोड में आउटपुट करने की सलाह दी जाती है: इष्टतम लोड मोड और निष्क्रिय मोड। इन दो मोड के बीच स्विचिंग विद्युत चुम्बकीय वाल्व, नियंत्रण प्रणाली की मदद से की जाती है।
लीनियर मोटर की शुरुआती प्रणाली को पारंपरिक मोटर के साथ इलेक्ट्रिक ड्राइव और ऊर्जा भंडारण उपकरण की मदद से किया जाता है। एक पारंपरिक इंजन की शुरुआत एक स्टार्टर (इलेक्ट्रिक ड्राइव) और एक चक्का (ऊर्जा भंडारण) की मदद से होती है। लीनियर मोटर को एक लीनियर इलेक्ट्रोस्पेक्टर और स्टार्टिंग रिसीवर, अंजीर का उपयोग करके शुरू किया जाता है। 9।
|
|
| अंजीर। 9. सिस्टम शुरू करना। |
शुरू करते समय, शुरू कंप्रेसर का पिस्टन, जब सक्रिय होता है, घुमावदार के विद्युत चुम्बकीय क्षेत्र के कारण उत्तरोत्तर चलता है, और फिर एक वसंत के साथ अपनी मूल स्थिति में लौटता है। रिसीवर को 8 ... 12 वायुमंडल तक पंप करने के बाद, बिजली को शुरुआती कंप्रेसर के टर्मिनलों से हटा दिया जाता है और इंजन शुरू करने के लिए तैयार होता है। रैखिक मोटर के पूर्व-कक्षों को संपीड़ित हवा की आपूर्ति करके स्टार्ट-अप होता है। वायु आपूर्ति विद्युत चुम्बकीय वाल्व के माध्यम से की जाती है, जिसका संचालन नियंत्रण प्रणाली द्वारा नियंत्रित किया जाता है। चूंकि नियंत्रण प्रणाली को कोई जानकारी नहीं है कि किस स्थिति में रॉड को जोड़ने वाले इंजन स्थित हैं, शुरू करने से पहले, पूर्व-इंजेक्शन कक्षों को उच्च दबाव वाली हवा की आपूर्ति की जाती है, उदाहरण के लिए, चरम सिलेंडर, इंजन शुरू होने से पहले पिस्टन को उनके मूल राज्य में रीसेट करने की गारंटी है। फिर, उच्च वायुदाब को मध्य सिलेंडर के प्री-चैम्बर में आपूर्ति की जाती है, इस प्रकार, सिलिंडर को शुरू करने से पहले हवादार कर दिया जाता है। उसके बाद, इंजन को शुरू करने के लिए बाहरी सिलेंडरों के इनलेट चेम्बरों में फिर से उच्च दबाव वाली हवा की आपूर्ति की जाती है। जैसे ही ऑपरेटिंग चक्र शुरू होता है (प्रेशर सेंसर ऑपरेटिंग चक्र के अनुरूप दहन कक्ष में एक उच्च दबाव का संकेत देगा), नियंत्रण प्रणाली, विद्युत चुम्बकीय वाल्व का उपयोग करके, शुरुआती रिसीवर से हवा का प्रवाह रोक देगा।
रैखिक मोटर के कनेक्टिंग रॉड्स के काम का सिंक्रनाइजेशन एक सिंक्रनाइज गियर और दांतेदार रैक की एक जोड़ी का उपयोग करके किया जाता है, अंजीर। 10, जनरेटर या कंप्रेसर पिस्टन के चुंबकीय सर्किट के जंगम भाग से जुड़ा हुआ है। गियर गियर तेल पंप की ड्राइव भी है, जिसका उपयोग रैखिक इंजन के रगड़ भागों के स्नेहन को मजबूर करने के लिए किया जाता है।
लीनियर पेट्रोलोलेंजर का जनरेटर एक सिंक्रोनस इलेक्ट्रिक मशीन है। एक पारंपरिक जनरेटर में, रोटर एक घूर्णी गति बनाता है, और चुंबकीय सर्किट के जंगम भाग का द्रव्यमान महत्वपूर्ण नहीं है। एक रैखिक जनरेटर में, चुंबकीय सर्किट का जंगम हिस्सा आंतरिक दहन इंजन के कनेक्टिंग रॉड के साथ एक घूमकर गति बनाता है, और चुंबकीय सर्किट के जंगम भाग का उच्च द्रव्यमान जनरेटर को काम करना असंभव बनाता है। जनरेटर चुंबकीय सर्किट के चलती हिस्से के द्रव्यमान को कम करने का एक तरीका खोजना आवश्यक है।
|
|
| अंजीर। 11. जनक। |
चुंबकीय सर्किट के बढ़ते भाग के द्रव्यमान को कम करने के लिए, इसके ज्यामितीय आयामों को क्रमशः कम करना आवश्यक है, आयतन और द्रव्यमान घटेगा, अंजीर। 11. लेकिन फिर चुंबकीय प्रवाह केवल पांच के बजाय एक जोड़ी खिड़कियों में घुमावदार होता है, यह बराबर है कि चुंबकीय प्रवाह कंडक्टर को पांच गुना छोटा करता है, क्रमशः। , और आउटपुट वोल्टेज (पावर) 5 गुना घट जाता है। जनरेटर वोल्टेज में कमी के लिए क्षतिपूर्ति करने के लिए, एक खिड़की में घुमावों की संख्या को जोड़ना आवश्यक है, ताकि पावर वाइंडिंग कंडक्टर की लंबाई मूल जनरेटर संस्करण, छवि 11 के समान हो जाए।
लेकिन अपरिवर्तित ज्यामितीय आयामों के साथ खिड़की में झूठ बोलने के लिए बड़ी संख्या में घुमावों के लिए, कंडक्टर क्रॉस-सेक्शन को कम करना आवश्यक है।
निरंतर लोड और आउटपुट वोल्टेज के साथ, इस तरह के कंडक्टर के लिए थर्मल लोड, इस मामले में बढ़ेगा और अधिक इष्टतम हो जाएगा (वर्तमान समान रहता है, और कंडक्टर क्रॉस-सेक्शन लगभग 5 गुना कम हो गया है)। यह मामला होगा यदि खिड़कियों की विंडिंग श्रृंखला में जुड़ी हुई है, अर्थात, जब लोड चालू धारा एक ही समय में सभी वाइंडिंग के माध्यम से प्रवाहित होती है, जैसे कि एक पारंपरिक जनरेटर में। लेकिन अगर हम वैकल्पिक रूप से केवल एक जोड़ी खिड़कियों की विंडिंग को लोड से जोड़ते हैं, जो वर्तमान में चुंबकीय प्रवाह द्वारा प्रतिच्छेदित है, तो इस विंडिंग में इतनी कम अवधि में गर्म होने का समय नहीं होगा, क्योंकि थर्मल प्रक्रियाएं निष्क्रिय हैं। यही है, वैकल्पिक रूप से केवल जनरेटर वाइंडिंग (डंडे की एक जोड़ी) के उस हिस्से को लोड से कनेक्ट करना आवश्यक है जो चुंबकीय प्रवाह को अवरुद्ध करता है, बाकी समय इसे ठंडा करना चाहिए। इस प्रकार, लोड हमेशा जनरेटर की केवल एक वाइंडिंग के साथ श्रृंखला में जुड़ा हुआ है। इस मामले में, जनरेटर के घुमावदार के माध्यम से बहने वाले वर्तमान का प्रभावी मूल्य कंडक्टर हीटिंग के दृष्टिकोण से इष्टतम मूल्य से अधिक नहीं होगा। इस प्रकार, 10 से अधिक बार महत्वपूर्ण रूप से संभव है, द्रव्यमान को न केवल जनरेटर चुंबकीय सर्किट के चलती हिस्से को कम करें, बल्कि चुंबकीय सर्किट के निश्चित भाग के द्रव्यमान को भी कम करें। इलेक्ट्रॉनिक कुंजी का उपयोग करके घुमावदार स्विचिंग। कुंजी के रूप में, जनरेटर वाइंडिंग को लोड से वैकल्पिक रूप से जोड़ने के लिए, अर्धचालक उपकरणों का उपयोग किया जाता है - थाइरिस्टर (त्रिक)। एक रैखिक जनरेटर एक तैनात सामान्य जनरेटर है, अंजीर। 11. उदाहरण के लिए, 3000 चक्र / मिनट की आवृत्ति और 6 सेंटीमीटर की कनेक्टिंग रॉड स्ट्रोक के साथ, प्रत्येक विंडिंग 0.00083 सेकंड तक गर्म होगी, वर्तमान 12 बार नाममात्र, शेष समय लगभग 0.01 सेकंड होगा, यह घुमावदार ठंडा होगा। जब ऑपरेटिंग आवृत्ति कम हो जाती है, तो हीटिंग का समय बढ़ जाएगा, लेकिन, तदनुसार, प्रवाह और लोड के माध्यम से बहने वाली धारा घट जाएगी। एक triac एक स्विच है (यह विद्युत सर्किट को बंद या खोल सकता है)। समापन और उद्घाटन स्वचालित रूप से होता है। ऑपरेशन के दौरान, जैसे ही चुंबकीय प्रवाह घुमावदार घुमावों को पार करना शुरू करता है, घुमावदार के सिरों पर एक प्रेरित विद्युत वोल्टेज दिखाई देता है, इससे विद्युत सर्किट का शॉर्ट सर्किट (ट्राइक का उद्घाटन) होता है। फिर, जब चुंबकीय प्रवाह अगली विंडिंग के कॉइल को पार करता है, तो त्रिक इलेक्ट्रोड के पार वोल्टेज ड्रॉप एक विद्युत सर्किट खोलता है। इस प्रकार, समय के प्रत्येक क्षण में, लोड हमेशा श्रृंखला में होता है, केवल एक जनरेटर वाइंडिंग के साथ।
अंजीर में। 12 से पता चलता है कि एक जनरेटर का विधानसभा ड्राइंग बिना उत्तेजना घुमावदार है।
रैखिक मोटरों के अधिकांश भाग क्रांति की सतह से निर्मित होते हैं, अर्थात्, उनके बेलनाकार आकार होते हैं। इससे टर्न ऑपरेशंस के सबसे सस्ते और सबसे स्वचालित ऑटोमेशन का उपयोग करके उनका निर्माण संभव हो जाता है।
|
|
| अंजीर। 12. जनरेटर विधानसभा ड्राइंग। |
रैखिक जनरेटर का गणितीय मॉडल ऊर्जा संरक्षण कानून और न्यूटन के नियमों के आधार पर बनाया गया है: प्रत्येक तात्कालिक समय पर, t0 और t1 पर, पिस्टन पर कार्य करने वाली बलों की समानता सुनिश्चित की जानी चाहिए। थोड़े समय के बाद, परिणामी बल की कार्रवाई के तहत, पिस्टन कुछ दूरी पर ले जाएगा। इस छोटे खंड में, हम मानते हैं कि पिस्टन समान रूप से गतिमान है। सभी बलों का मूल्य भौतिकी के नियमों के अनुसार बदल जाएगा और ज्ञात सूत्रों के अनुसार गणना की जाएगी।
[हैंडबुक ऑफ फिजिक्स: कुहलिंग एच। ट्रांस। उसके साथ। दूसरा संस्करण। - एम ।: मीर, 1985. - 520 पी।, इल।]। सभी डेटा स्वचालित रूप से तालिका में दर्ज किए जाते हैं, उदाहरण के लिए एक्सेल में। उसके बाद, t0 को t1 के मान निर्दिष्ट किए जाते हैं और चक्र दोहराता है। यही है, हम एक लघुगणक ऑपरेशन करते हैं।
गणितीय मॉडल एक तालिका है, उदाहरण के लिए, एक्सेल में, और एक जनरेटर का एक विधानसभा ड्राइंग (स्केच)। स्केच में रेखीय आयाम नहीं होते हैं, लेकिन एक्सेल में तालिका कोशिकाओं के निर्देशांक होते हैं। संबंधित ग्रहण किए गए रैखिक आयाम तालिका में दर्ज किए जाते हैं, और प्रोग्राम एक आभासी जनरेटर में पिस्टन के आंदोलन की गणना और प्लॉट करता है। यही है, आयामों को प्रतिस्थापित करके: पिस्टन व्यास, प्री-डिस्चार्ज चैंबर की मात्रा, प्यूरी विंडो को पिस्टन स्ट्रोक, आदि, हम समय के साथ पिस्टन आंदोलन की यात्रा की दूरी, वेग और त्वरण के ग्राफ प्राप्त करते हैं। यह संभवतः सैकड़ों विकल्पों की गणना करना संभव बनाता है, और सबसे इष्टतम एक का चयन करें।
एक रैखिक जनरेटर विंडो की एक तार परत, एक पारंपरिक जनरेटर के विपरीत, एक विमान में एक सर्पिल में मुड़ी हुई होती है, इसलिए तारों को परिपत्र क्रॉस सेक्शन के नहीं के साथ घुमावदार करना आसान होता है, लेकिन आयताकार, यानी घुमावदार एक सर्पिल में मुड़ तांबे की प्लेट है। यह खिड़की के भराव कारक को बढ़ाने के लिए संभव बनाता है, साथ ही साथ वाइंडिंग की यांत्रिक शक्ति में काफी वृद्धि करता है। यह ध्यान दिया जाना चाहिए कि कनेक्टिंग रॉड की गति, और इसलिए चुंबकीय सर्किट का मूविंग हिस्सा समान नहीं है। इसका मतलब यह है कि चुंबकीय प्रेरण लाइनें अलग-अलग गति के साथ अलग-अलग खिड़कियों की घुमावदार पार करती हैं। घुमावदार तारों का पूरी तरह से उपयोग करने के लिए, प्रत्येक खिड़की के घुमावों की संख्या इस खिड़की (कनेक्टिंग रॉड की गति) के पास चुंबकीय प्रवाह की गति के अनुरूप होनी चाहिए। प्रत्येक विंडो के घुमावों की संख्या को कनेक्टिंग रॉड द्वारा तय की गई दूरी पर कनेक्टिंग रॉड की गति की निर्भरता को ध्यान में रखते हुए चुना जाता है।
इसके अलावा, उत्पन्न धारा के अधिक समान वोल्टेज के लिए, अलग-अलग मोटाई के तांबे की प्लेट के साथ प्रत्येक खिड़की के घुमावदार को हवा देना संभव है। उस क्षेत्र में जहां कनेक्टिंग रॉड की गति अधिक नहीं है, कम मोटाई की प्लेट द्वारा घुमावदार किया जाता है। विंडिंग के घुमावों की एक बड़ी संख्या खिड़की में फिट होगी और, इस क्षेत्र में कनेक्टिंग रॉड की कम गति पर, जनरेटर अधिक "हाई-स्पीड" अनुभागों पर वोल्टेज के बराबर वोल्टेज का उत्पादन करेगा, हालांकि उत्पन्न वर्तमान कम होगा।
वर्णित जनरेटर का मुख्य अनुप्रयोग छोटे उद्यमों में एक निर्बाध बिजली की आपूर्ति है, जो मुख्य वोल्टेज के नुकसान के मामले में जुड़े उपकरणों को लंबे समय तक संचालित करने की अनुमति देता है, या जब इसके पैरामीटर स्वीकार्य सीमा से अधिक हो जाते हैं। इलेक्ट्रिक जनरेटर का उपयोग औद्योगिक और घरेलू बिजली के उपकरणों के लिए इलेक्ट्रिक ऊर्जा प्रदान करने के लिए किया जा सकता है, उन जगहों पर जहां कोई नहीं है विद्युत नेटवर्क, और एक वाहन (हाइब्रिड कार) के लिए विद्युत इकाई के रूप में, विद्युत ऊर्जा के मोबाइल जनरेटर के रूप में भी। उदाहरण के लिए, एक राजनयिक (सूटकेस, बैग) के रूप में विद्युत ऊर्जा का एक जनरेटर। उपयोगकर्ता अपने साथ उन स्थानों पर ले जाता है जहां कोई विद्युत नेटवर्क (निर्माण, शिविर, देश का घर, आदि) नहीं हैं। यदि आवश्यक हो, तो "प्रारंभ" बटन दबाकर, जनरेटर शुरू होता है और इससे जुड़े विद्युत उपकरणों को सक्रिय करता है: बिजली के उपकरण, घरेलू उपकरण। यह विद्युत ऊर्जा का एक सामान्य स्रोत है, केवल इसके एनालॉग्स की तुलना में बहुत सस्ता और हल्का है।
रैखिक मोटर्स का उपयोग एक सस्ती, आसान संचालन और प्रबंधन, हल्के कार बनाने के लिए संभव बनाता है।
एक रैखिक इलेक्ट्रिक जनरेटर के साथ एक वाहन एक दो-सीटर प्रकाश (250 किलोग्राम) कार, अंजीर है। 13।
प्रबंधन में गति (दो पैडल) को स्विच करना आवश्यक नहीं है। इस तथ्य के कारण कि जनरेटर अधिकतम शक्ति तक पहुंच सकता है, यहां तक कि जब "चलती" (एक नियमित कार के विपरीत), त्वरण विशेषताओं, यहां तक कि कर्षण मोटर की कम क्षमता के साथ, पारंपरिक कारों की समान विशेषताओं की तुलना में बेहतर प्रदर्शन होता है। स्टीयरिंग व्हील और ABS सिस्टम को बढ़ाने के प्रभाव को प्रोग्रामेटिक रूप से प्राप्त किया जाता है, क्योंकि सभी आवश्यक "हार्डवेयर" पहले से ही है (प्रत्येक व्हील के लिए ड्राइव आपको व्हील के टॉर्क या ब्रेकिंग टॉर्क को नियंत्रित करने की अनुमति देता है। उदाहरण के लिए, स्टीयरिंग व्हील को चालू करने से दाएं और बाएं स्टीयरिंग व्हील के बीच टॉर्क पुनर्वितरित हो जाता है और पहिए खुद को मोड़ लेते हैं चालक केवल उन्हें इधर-उधर मुड़ने की अनुमति देता है, यानी, सहज नियंत्रण)। ब्लॉक लेआउट आपको उपभोक्ता के अनुरोध पर कार को इकट्ठा करने की अनुमति देता है (आप कुछ ही मिनटों में जनरेटर को अधिक शक्तिशाली एक के साथ आसानी से बदल सकते हैं)।
यह एक साधारण कार है जो अपने एनालॉग्स की तुलना में बहुत सस्ती और हल्की है।
विशेषताएं - ऑपरेशन में आसानी, कम लागत, त्वरित सेट गति, 12 किलोवाट तक बिजली, ऑल-व्हील ड्राइव (ऑल-टेरेन व्हीकल)।
जनरेटर के विशिष्ट आकार के कारण प्रस्तावित जनरेटर वाले वाहन में गुरुत्वाकर्षण का बहुत कम केंद्र होता है, इसलिए इसमें उच्च ड्राइविंग स्थिरता होगी। इसके अलावा, ऐसे वाहन में बहुत अधिक त्वरण विशेषताएं होंगी। प्रस्तावित वाहन में सभी गति पर बिजली इकाई की अधिकतम शक्ति का उपयोग कर सकते हैं। पावर यूनिट का वितरित द्रव्यमान कार बॉडी को लोड नहीं करता है, इसलिए इसे सस्ता, आसान और सरल बनाया जा सकता है।
वाहन का कर्षण मोटर जिसमें इसे एक बिजली इकाई के रूप में उपयोग किया जाता है, उसे निम्नलिखित शर्तों को पूरा करना चाहिए:
इंजन के पावर वाइंडिंग्स को सीधे, बिना कनवर्टर के, जनरेटर टर्मिनलों से जुड़ा होना चाहिए (विद्युत संचरण की दक्षता बढ़ाने और वर्तमान कनवर्टर की कीमत कम करने के लिए);
इलेक्ट्रिक मोटर के आउटपुट शाफ्ट के रोटेशन की गति को एक विस्तृत श्रृंखला में विनियमित किया जाना चाहिए, और इलेक्ट्रिक जनरेटर के संचालन की आवृत्ति पर निर्भर नहीं होना चाहिए;
इंजन में विफलता के लिए एक उच्च समय होना चाहिए, अर्थात, ऑपरेशन में विश्वसनीय होना चाहिए (एक कलेक्टर नहीं है);
इंजन सस्ती (सरल) होना चाहिए;
इंजन में कम आउटपुट गति पर उच्च टोक़ होना चाहिए;
इंजन हल्का होना चाहिए।
इस तरह के इंजन के वाइंडिंग्स का वायरिंग आरेख अंजीर में दिखाया गया है। 14. रोटर घुमावदार की बिजली आपूर्ति की ध्रुवीयता को बदलकर, हम रोटर टॉर्क प्राप्त करते हैं।
इसके अलावा, रोटर वाइंडिंग को बिजली की आपूर्ति की परिमाण और ध्रुवता को बदलकर, स्टेटर चुंबकीय क्षेत्र के संबंध में रोटर के स्लिप रोटेशन को पेश किया जाता है। रोटर वाइंडिंग के सप्लाई करंट का नियंत्रण, स्लिप कंट्रोल होता है, 0 से लेकर ... 100%। रोटर वाइंडिंग की बिजली की आपूर्ति इंजन की शक्ति का लगभग 5% है, इसलिए आपको कर्षण मोटर्स के पूरे वर्तमान के लिए नहीं, बल्कि केवल उनके उत्तेजना वर्तमान के लिए करने की आवश्यकता है। वर्तमान कनवर्टर की शक्ति, उदाहरण के लिए, 12 किलोवाट के एक ऑनबोर्ड इलेक्ट्रिक जनरेटर के लिए, केवल 600 डब्ल्यू है, और यह शक्ति चार चैनलों (प्रत्येक कर्षण मोटर पहिया अपने स्वयं के चैनल के लिए) में विभाजित है, अर्थात कनवर्टर के प्रत्येक चैनल की शक्ति 150 वाट है। इसलिए, कनवर्टर की कम दक्षता का सिस्टम की दक्षता पर महत्वपूर्ण प्रभाव नहीं पड़ेगा। कम-शक्ति, कम लागत वाले अर्धचालक तत्वों का उपयोग करके कनवर्टर का निर्माण किया जा सकता है।
किसी भी रूपांतरण के बिना विद्युत जनरेटर के टर्मिनलों से वर्तमान को कर्षण मोटर्स के पावर विंडिंग पर लागू किया जाता है। केवल उत्तेजना प्रवाह को परिवर्तित किया जाता है, ताकि यह हमेशा पावर वाइंडिंग्स के वर्तमान के साथ एंटीपेज़ में हो। चूँकि उत्तेजना करंट कुल खपत का केवल 5 ... 6% है कर्षण मोटरकनवर्टर को जनरेटर की कुल शक्ति का 5 ... 6% की शक्ति के लिए आवश्यक है, जो कि कनवर्टर की कीमत और वजन को काफी कम कर देगा और सिस्टम की दक्षता में वृद्धि करेगा। इस स्थिति में, कर्षण मोटर्स के ड्राइव वर्तमान उत्तेजना कनवर्टर को "पता" करने की आवश्यकता होती है कि अधिकतम टोक़ बनाने के लिए मोटर शाफ्ट प्रत्येक समय बिंदु पर फ़ील्ड वाइंडिंग को चालू करने के लिए किस स्थिति में है। ट्रैक्शन मोटर आउटपुट शाफ्ट की स्थिति सेंसर एक पूर्ण एनकोडर है।
वाहन की बिजली इकाई के रूप में एक रैखिक विद्युत जनरेटर का उपयोग आपको कार ब्लॉक लेआउट बनाने की अनुमति देता है। यदि आवश्यक हो, तो आप कुछ ही मिनटों में बड़ी विधानसभाओं और समुच्चय को बदल सकते हैं, अंजीर। 15, और इसके अलावा सबसे अच्छे प्रवाह के साथ एक शरीर को लागू करने के लिए, क्योंकि कम-शक्ति वाली कार में वायुगतिकीय रूपों की अपूर्णता (उच्च ड्रैग गुणांक के कारण) के कारण वायु प्रतिरोध को दूर करने के लिए पावर रिजर्व नहीं है।
एक रैखिक कंप्रेसर वाला एक वाहन एक दो-सीटर हल्के (200 किलोग्राम) कार, अंजीर है। 16. यह एक रैखिक जनरेटर के साथ एक कार का एक सरल और सस्ता एनालॉग है, लेकिन एक कम ट्रांसमिशन दक्षता के साथ।
एक वृद्धिशील एनकोडर का उपयोग व्हील स्पीड सेंसर के रूप में किया जाता है। वृद्धिशील एनकोडर में एक पल्स आउटपुट होता है, जब एक निश्चित कोण को चालू करते हैं, तो आउटपुट पर एक वोल्टेज पल्स उत्पन्न होता है। सेंसर का इलेक्ट्रॉनिक सर्किट, समय की प्रति इकाई दालों की संख्या को "गिनता है" और इस कोड को आउटपुट रजिस्टर में लिखता है। जब नियंत्रण प्रणाली इस सेंसर के कोड (पता) को "फीड" करती है, इलेक्ट्रॉनिक सर्किट एन्कोडर, सीरियल रूप में, आउटपुट रजिस्टर से सूचना कंडक्टर को कोड देता है। नियंत्रण प्रणाली सेंसर कोड (पहिया की घूर्णी गति के बारे में जानकारी) पढ़ती है और, एक पूर्वनिर्धारित एल्गोरिथ्म के अनुसार, एक्ट्यूएटर के स्टेपर मोटर को नियंत्रित करने के लिए एक कोड उत्पन्न करता है।
अधिकांश लोगों के लिए एक वाहन की लागत 20 ... 50 मासिक आय है। लोग $ 8 ... $ 12 हजार के लिए एक नई कार खरीदने का जोखिम नहीं उठा सकते हैं, और $ 1 ... $ 2 हजार की मूल्य सीमा में बाजार में कोई कार नहीं है। वाहन विद्युत इकाई के रूप में एक रैखिक विद्युत जनरेटर या कंप्रेसर का उपयोग, आपको एक आसान उपयोग और सस्ती वाहन बनाने की अनुमति देता है।
मुद्रित सर्किट बोर्डों की आधुनिक उत्पादन तकनीक, और निर्मित इलेक्ट्रॉनिक उत्पादों की श्रेणी, आपको दो तारों - बिजली और सूचना का उपयोग करके लगभग सभी विद्युत कनेक्शन बनाने की अनुमति देती है। यही है, प्रत्येक व्यक्ति के कनेक्शन को स्थापित न करें विद्युत उपकरण: सेंसर, एक्ट्यूएटर और सिग्नलिंग डिवाइस, और प्रत्येक डिवाइस को एक सामान्य शक्ति और सामान्य सूचना तार से कनेक्ट करते हैं। नियंत्रण प्रणाली, बदले में, डिवाइस के कोड (पते) को एक अनुक्रमिक कोड में, डेटा वायर में आउटपुट करती है, और फिर डिवाइस की स्थिति के बारे में जानकारी के लिए भी अनुक्रमिक कोड में और उसी लाइन के साथ इंतजार करती है। इन संकेतों के आधार पर, नियंत्रण प्रणाली कार्यकारी और सिग्नलिंग उपकरणों के लिए नियंत्रण कोड बनाती है और कार्यकारी या सिग्नलिंग उपकरणों को एक नए राज्य (यदि आवश्यक हो) को स्थानांतरित करने के लिए उन्हें प्रसारित करती है। इस प्रकार, स्थापना या मरम्मत के दौरान, प्रत्येक डिवाइस को दो तारों से जुड़ा होना चाहिए (ये दो तार सभी ऑन-बोर्ड विद्युत उपकरणों के लिए आम हैं) और बिजली के मैदान।
लागत को कम करने के लिए, और तदनुसार उपभोक्ता के लिए उत्पादों की कीमत, ऑनबोर्ड उपकरणों की स्थापना और विद्युत कनेक्शन को सरल करना आवश्यक है। उदाहरण के लिए, पारंपरिक स्थापना के साथ, पीठ को चालू करने के लिए साइड लाइट, यह एक स्विच की मदद से आवश्यक है, प्रकाश उपकरण के विद्युत आपूर्ति सर्किट। सर्किट में शामिल हैं: विद्युत ऊर्जा का एक स्रोत, एक कनेक्टिंग तार, एक अपेक्षाकृत शक्तिशाली सर्किट ब्रेकर, एक विद्युत भार। बिजली की आपूर्ति को छोड़कर सर्किट के प्रत्येक तत्व को व्यक्तिगत स्थापना, एक सस्ती यांत्रिक स्विच की आवश्यकता होती है, जिसमें कम संख्या में ऑन-ऑफ चक्र होते हैं। बड़ी संख्या में ऑनबोर्ड विद्युत उपकरणों के साथ, इंस्टॉलेशन और कनेक्टिंग तारों की कीमत उपकरणों की संख्या के अनुपात में बढ़ जाती है, मानव कारकों के कारण त्रुटि की संभावना बढ़ जाती है। बड़े पैमाने पर उत्पादन के साथ, उपकरणों को नियंत्रित करना और प्रत्येक डिवाइस के लिए व्यक्तिगत रूप से बजाय, एक लाइन पर सेंसर से जानकारी पढ़ना आसान है। उदाहरण के लिए, पीछे की स्थिति के दीपक को सक्रिय करने के लिए, इस मामले में, टच टच सेंसर को स्पर्श करना आवश्यक है, नियंत्रण सर्किट रियर स्थिति दीपक को सक्रिय करने के लिए एक नियंत्रण कोड उत्पन्न करेगा। रियर मार्कर लैंप पर स्विच करने के लिए डिवाइस का पता और स्विचिंग के लिए सिग्नल को सूचना तार पर प्रदर्शित किया जाएगा, जिसके बाद रियर मार्कर लैंप का आंतरिक पावर सर्किट बंद हो जाएगा। वह है बिजली के सर्किट वे एक जटिल तरीके से बनते हैं: स्वचालित रूप से मुद्रित सर्किट बोर्ड का निर्माण करते समय (उदाहरण के लिए, एसएमडी लाइनों पर बढ़ते बोर्ड), और विद्युत रूप से सभी उपकरणों को दो सामान्य तारों और एक विद्युत "द्रव्यमान" के साथ जोड़कर।
राष्ट्रीय विज्ञान और प्रौद्योगिकी के विकास में आपके योगदान के लिए बहुत बहुत धन्यवाद!
इंडक्शन सिस्टम डिवाइस - इंस्ट्रूमेंट मेकिंग सेक्शन, ANALOG ELECTRIC MEASUREMENT DEVICES Design and Principles ...

समस्या - एक संकेतक के साथ स्विच को कैसे जोड़ा जाए - वास्तव में ऐसा नहीं है क्योंकि यह एक trifling मामला है ...।

एक निजी घर या अपार्टमेंट ग्राउंडिंग। कई आश्चर्य है कि क्या उन्हें एक निजी घर में रखा जाना चाहिए, या आप इसके बिना कर सकते हैं ...

दृष्टि की विकृति के बीच, दृष्टिवैषम्य, दृश्य फ़ोकस का एक विकार, अक्सर होता है। इससे पीड़ित व्यक्ति ...

दुनिया में सबसे आम इलेक्ट्रिक मोटर्स, बेशक, अतुल्यकालिक मोटर्स हैं। कैसे एकीकृत करने के लिए ...
(पेज "बैरंचिकोव ईवी पाठ्यपुस्तक" भूगोल "अध्याय 2, पृष्ठ 21 - 32) विषय पर विषय
नताल्या वोरोनिना पीएच.डी. OAO "LUKOIL" के कर लेखा पद्धति विभाग के विशेषज्ञ ...।

तो, 380 V का वोल्टेज कुछ स्विचबोर्ड पर क्यों आता है और 220 का कुछ में? कुछ क्यों करें ...

तेल और गैस उद्योग का विकास हमारे देश की अर्थव्यवस्था के मुख्य पहलुओं में से एक है। रूसी का हिस्सा ...

पैंतीस साल पहले से अधिक रोड़े बनने शुरू हुए। बेशक, इस समय के बाद ...

पहला दोष यह है कि मैं बुध 201 काउंटर में पसंद नहीं करता इसका आकार है। उन्होंने तुलना की ...
एक तुल्यकालिक जनरेटर के संचालन का सिद्धांत तुल्यकालिक मशीनों में, रोटर की गति रोटेशन आवृत्ति के बराबर होती है ...

दृष्टिवैषम्य के लिए लेंस - अब यह समस्या तेजी से दृष्टिवैषम्य के बारे में चिंतित है। आखिर इससे पहले ...

हम दुनिया में सबसे सुंदर अमीर देश में रहते हैं, और अन्य सभी देश हमें ईर्ष्या करते हैं ... तो यह है, या नहीं, ...

इस वर्ष, ऊर्जा विषय आर्थिक प्रकाशनों के संपादकीय में मजबूती से शामिल है। यूक्रेन में घटनाएँ ...

दो चरण के तारों के बीच, इसे कभी-कभी इंटरफैसिअल या इंटरफैसिअल के रूप में जाना जाता है। चरण वोल्टेज माना जाता है ...