एक परीक्षक द्वारा प्रतिरोध मापना - प्रक्रिया सुविधाएँ
ऐसी कई परिस्थितियां हैं जहां यह जानना उपयोगी होगा कि मल्टीमीटर के साथ प्रतिरोध को कैसे मापें और क्या कोई अंतर है कि कैसे ...
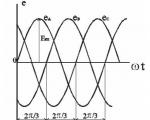
एक अतुल्यकालिक मोटर के प्रदर्शन को दक्षता की निर्भरता कहा जाता है η, पावर फैक्टर, इनपुट पावर, करंट, मोटर शाफ्ट पर टॉर्क, स्लिप एसनेटवर्क में निरंतर वोल्टेज और आवृत्ति पर मोटर शाफ्ट पर उपयोगी शक्ति के मूल्य से घूर्णी गति (छवि। 6)।
निर्भरता एक वक्र है, जो कि एब्सिस्सा अक्ष से बहुत थोड़ा झुकाव है। गति प्रतिक्रिया इंजन के यांत्रिक प्रदर्शन से आकार में थोड़ी भिन्न होती है: इसे कठोर कहा जा सकता है।
निर्भरता। स्थिर राज्य ऑपरेशन में, जहां इंजन का प्रभावी ब्रेकिंग टॉर्क है, और टॉर्क x.x है। जब से लोड x.h से बदलता है। संख्या के लिए अतुल्यकालिक मोटर्स की घूर्णी गति लगभग स्थिर रहती है, प्रेरण मोटर की निर्भरता लगभग सीधी होती है; इसी बिंदु पर y- अक्ष को काटता है।
पावर फैक्टर
ट्रांसफॉर्मर की तरह एक एसिंक्रोनस मोटर, नेटवर्क से एक लैगिंग करंट लेती है। इसलिए, एक अतुल्यकालिक मोटर में होने वाली ऊर्जा प्रक्रिया, दो मात्राओं की विशेषता है: सक्रिय शक्ति और प्रतिक्रियाशील शक्ति क्यू मैं
और के बीच का अनुपात क्यू मैं: ![]()
एसिंक्रोनस मोटर का पावर फैक्टर शाफ्ट पर लोड पर निर्भर करता है।
जब x.h. मशीनें, जब ऊर्जा का उपभोग केवल स्टेटर और छोटे यांत्रिक नुकसान में छोटे नुकसान को कवर करने के लिए किया जाता है, तो सक्रिय शक्ति दो गुना होती है, और प्रतिक्रियाशील शक्ति अधिक होती है, क्योंकि अधिकतम ध्रुव प्रवाह के साथ एक घूर्णन चुंबकीय क्षेत्र सामान्य वोल्टेज में कार में उत्साहित होता है। इसलिए, जब x.h. अतुल्यकालिक मोटर है
![]()
भार में क्रमिक वृद्धि के साथ, सक्रिय शक्ति बढ़ जाती है, और प्रतिक्रियाशील शक्ति लगभग स्थिर रहती है, क्योंकि मुख्य वोल्टेज के निरंतर आयाम के साथ, मुख्य फ़ील्ड पोल का प्रवाह x.x पर समान रहता है। नतीजतन, मैकेनिकल इंजन पावर बढ़ने के साथ, इसका पावर फैक्टर भी बढ़ता है। नाममात्र के करीब लोड के साथ उच्चतम मूल्य (0.75-0.95) तक पहुंचता है। हालांकि, शाफ्ट पर ब्रेकिंग टॉर्क में और वृद्धि के साथ, रोटर की गति में कमी और स्टेटर और रोटर वाइंडिंग में धाराओं में उल्लेखनीय वृद्धि के साथ, पावर फैक्टर कम हो जाता है, जिसे सक्रिय बिजली की तुलना में बढ़े हुए खेतों और प्रतिक्रियाशील शक्ति के तेज विकास द्वारा समझाया गया है।
उद्यमों की आर्थिक बिजली आपूर्ति के लिए एक उच्च शक्ति कारक बनाए रखना महत्वपूर्ण है। विशेष रूप से, लंबे समय तक x.h. इंडक्शन मोटर: यदि व्यक्तिगत मशीनों पर कोई काम नहीं होता है, तो नेटवर्क से मोटर काट दिया जाता है। इसके अलावा, यह सुनिश्चित करना आवश्यक है कि डिवाइस की शक्ति, एक अतुल्यकालिक मोटर द्वारा संचालित, नाममात्र मोटर शक्ति से थोड़ा अलग है। यदि एक अतुल्यकालिक मोटर के लंबे समय तक संचालन के दौरान, इसकी औसत शक्ति नाममात्र के 45% से अधिक नहीं होती है, तो ऐसी इलेक्ट्रिक मोटर को एक उपयुक्त मोटर शक्ति से बदल दिया जाता है।
ऐसे मामलों में जहां पूर्ण लोड पर इंजन का संचालन एक महत्वपूर्ण भार के साथ अपने काम के साथ जोड़ा जाता है, जिस पर यह अस्वीकार्य रूप से कम हो जाता है, शक्ति कारक को बढ़ाने के लिए विशेष उपाय लागू होते हैं। ऐसा करने के लिए जबकि एसिंक्रोनस मोटर एक महत्वपूर्ण भार के साथ चल रहा है / उदाहरण के लिए, पी 2<0,5 Р 2Н / снижают фазные напряжения на его статорной обмотке. Тем самым поток полюса вращательного поля, а, следовательно, и реактивная мощность машины будут уменьшены. Наиболее просто это достигается в двигателях, допускающих пересоединение фаз обмотки статора с на Y और नाममात्र चरण वोल्टेज के बराबर एक रैखिक वोल्टेज के साथ नेटवर्क में शामिल है। तब जब स्टेटर घुमावदार COMP के नाममात्र चरण के करीब लोड के साथ काम कर रहा है। और महत्वपूर्ण अंडरलोडिंग पर - Y। यह चरण वोल्टेज सी में कमी की ओर जाता है। स्टेटर वाइंडिंग के चरणों का यह पुन: संयोजन आमतौर पर एक स्वचालित डिवाइस का उपयोग करके किया जाता है। इस तरह के उपकरण से लैस इंजन, नाममात्र के करीब लोड परिवर्तनों की एक विस्तृत श्रृंखला में काम करता है।
क्षमता प्रेरण मोटर
![]()
पी 1 = पी 2 + lossP नुकसान
नुकसान को स्टेटर कोर के स्टील के लोड / नुकसान से स्थायी रूप से स्वतंत्र रूप से विभाजित किया जा सकता है, यांत्रिक नुकसान /, वे रासायनिक संरचना के अनुभव से प्रयोगात्मक रूप से निर्धारित होते हैं; परिवर्तनीय नुकसान - स्टेटर और रोटर कंडक्टर को गर्म करने के लिए नुकसान
और अतिरिक्त नुकसान।
क्षमता जब परिवर्तनीय हानियाँ स्थिर होती हैं तो इंजन अपने अधिकतम मूल्य / 65-95% / तक पहुँच जाता है। अधिकांश इंजनों में यह अधिकतम दक्षता होती है। लगभग नाममात्र के 75% के बराबर लोड होता है, क्योंकि इंजनों को इस तथ्य को ध्यान में रखते हुए डिज़ाइन किया गया है कि वे हमेशा पूरी तरह से लोड नहीं होते हैं।
काम की तैयारी में, सैद्धांतिक सामग्री को दोहराएं: ऑपरेशन का सिद्धांत और तीन-चरण अतुल्यकालिक मोटर का उपकरण; पर्ची की अवधारणा; अतुल्यकालिक इंजन के विद्युत चुम्बकीय क्षण; पर्ची पर पल की निर्भरता; अतुल्यकालिक मोटर की अधिभार क्षमता; तीन-चरण अतुल्यकालिक मोटर का प्रदर्शन।
काम का कार्यक्रम।
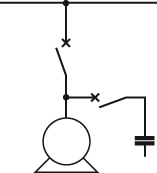
1. गिलहरी के पिंजरे के साथ अतुल्यकालिक मोटर (बीपी) के मुख्य संरचनात्मक तत्वों के संचालन, उपकरण और उद्देश्य के सिद्धांत का अध्ययन करना।
2. रक्तचाप (अंजीर 7) के परीक्षण की योजना और प्रयोगशाला के काम की पीठ के साथ परिचित होने के लिए।
3. नाममात्र मोड के साथ, इंजन द्वारा विकसित समय की गणना करने के लिए पासपोर्ट डेटा से। नीचे दी गई तालिका में भरें।
4. Fig.8 और Fig.9 के आरेखों का उपयोग करके स्टेटर हेल के चरणों को चिह्नित करें।
5. साधन वोल्टेज जानना ( यू ए = 380 वी), इंजन के नाममात्र मोड पर स्टेटर वाइंडिंग्स के कनेक्शन सर्किट की पसंद का औचित्य साबित करें।
6. चयनित विकल्प योजना लीजिए। लोड के बिना इंजन शुरू करें। वर्तमान और नो-लोड करंट को मापें। जब इंजन बिना लोड के चालू होता है, तो वर्तमान शुरू करने की बहुलता की गणना करें।
7. डेटा निकालें और इंजन के प्रदर्शन और यांत्रिक प्रदर्शन का निर्माण करें।
8. एक रिपोर्ट बनाएं और किए गए काम पर एक निष्कर्ष निकालें।
शब्द "प्रतिक्रियाशील" शक्ति का उद्भव लोड द्वारा खपत की गई शक्ति को अलग करने की आवश्यकता के साथ जुड़ा हुआ है, जो घटक विद्युत चुम्बकीय क्षेत्र बनाता है और इंजन टोक़ प्रदान करता है। यह घटक तब होता है जब लोड की आगमनात्मक प्रकृति। उदाहरण के लिए, इलेक्ट्रिक मोटर्स को कनेक्ट करते समय। वस्तुतः सभी घरेलू भार, औद्योगिक उत्पादन का उल्लेख नहीं करने के लिए, कुछ हद तक आगमनात्मक हैं।
विद्युत सर्किट में, जब लोड प्रकृति में सक्रिय (प्रतिरोधक) होता है, तो वोल्टेज से वर्तमान प्रवाह चरण में होता है (लीड नहीं होता है या पीछे नहीं होता है)। यदि लोड प्रकृति में प्रेरक है (मोटर्स, निष्क्रिय में ट्रांसफार्मर), तो वोल्टेज के पीछे वर्तमान लैग। जब लोड में एक कैपेसिटिव प्रकृति (कैपेसिटर) होता है, तो वर्तमान वोल्टेज का नेतृत्व करता है।
मोटर द्वारा उपभोग की जाने वाली कुल धारा सदिश राशि द्वारा निर्धारित की जाती है:
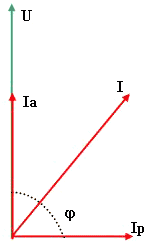
ये धाराएं इंजन द्वारा खपत की गई बिजली से जुड़ी होती हैं।
प्रतिक्रियाशील शक्ति यांत्रिक कार्य का उत्पादन नहीं करती है, हालांकि इंजन के काम करने के लिए यह आवश्यक है, इसलिए इसे बिजली आपूर्ति संगठन से उपभोग नहीं करने के लिए साइट पर प्राप्त किया जाना चाहिए। इस प्रकार, हम तारों और केबलों पर लोड को कम करते हैं, मोटर टर्मिनलों पर वोल्टेज बढ़ाते हैं, प्रतिक्रियाशील शक्ति के लिए भुगतान कम करते हैं, हमारे पास बिजली ट्रांसफार्मर से खपत की गई वर्तमान को कम करके अतिरिक्त मशीनों को जोड़ने का अवसर है।
प्रतिक्रियाशील बिजली की खपत को निर्धारित करने वाले पैरामीटर को कहा जाता है कॉस (φ)
कॉस (Harm) = पी 1 हार्म / ए 1 हार्म
ए = √P = + Q²
इस प्रकार, कॉस (,) कम हो जाता है क्योंकि लोड की प्रतिक्रियाशील बिजली की खपत बढ़ जाती है। कॉस (necessary) को बढ़ाने के लिए प्रयास करना आवश्यक है, क्योंकि निम्न कॉस (φ) में निम्नलिखित समस्याएं हैं:
ऊपर से, यह स्पष्ट है कि प्रतिक्रियाशील बिजली मुआवजा आवश्यक है। सक्रिय क्षतिपूर्ति प्रतिष्ठानों का उपयोग करके आसानी से क्या हासिल किया जा सकता है। कंडेनसर जिसमें इंजनों की प्रतिक्रियाशील शक्ति की भरपाई होगी।
प्रतिक्रियाशील बिजली उपभोक्ताओंचुंबकीय क्षेत्र बनाने के लिए आवश्यक हैं दोनों व्यक्तिगत संचरण लिंक (ट्रांसफार्मर, रेखाएं, रिएक्टर), और ऐसे विद्युत रिसीवर हैं जो बिजली को एक अन्य प्रकार की ऊर्जा में परिवर्तित करते हैं, जो कार्रवाई के अपने सिद्धांत के अनुसार, चुंबकीय क्षेत्र (प्रेरण मोटर्स, प्रेरण भट्टियां, आदि) का उपयोग करते हैं। )। अतुल्यकालिक मोटर्स और ट्रांसफार्मर चुंबकीय क्षेत्रों के गठन से जुड़ी कुल प्रतिक्रियाशील शक्ति का 80-85% तक उपभोग करते हैं। प्रतिक्रियाशील शक्ति के समग्र संतुलन में एक अपेक्षाकृत छोटा हिस्सा अपने अन्य उपभोक्ताओं के हिस्से में आता है, उदाहरण के लिए, प्रेरण भट्टियां, वेल्डिंग ट्रांसफार्मर, कनवर्टर संयंत्र, लुमिनेन्सेंट प्रकाश व्यवस्था, आदि।
प्रतिक्रियाशील शक्ति के उपभोक्ता के रूप में ट्रांसफार्मर। ट्रांसफार्मर बिजली संयंत्र से उपभोक्ता के लिए बिजली के प्रसारण में मुख्य लिंक में से एक है। पावर स्टेशन और उपभोक्ता के बीच और बिजली पारेषण योजना के बीच की दूरी के आधार पर, परिवर्तन चरणों की संख्या दो से छह तक होती है। इसलिए, स्थापित ट्रांसफार्मर क्षमता आमतौर पर बिजली प्रणाली जनरेटर की कुल शक्ति से कई गुना अधिक होती है। प्रत्येक ट्रांसफार्मर स्वयं प्रतिक्रियाशील शक्ति का उपभोक्ता है। एक चर चुंबकीय प्रवाह बनाने के लिए प्रतिक्रियाशील शक्ति की आवश्यकता होती है, जिसके माध्यम से ट्रांसफार्मर की एक विंडिंग से ऊर्जा दूसरे में स्थानांतरित की जाती है।
प्रतिक्रियाशील शक्ति के उपभोक्ता के रूप में अतुल्यकालिक मोटर। सक्रिय शक्ति के साथ, अतुल्यकालिक मोटर्स बिजली प्रणाली के कुल प्रतिक्रियाशील शक्ति का 60-65% तक उपभोग करते हैं। ऑपरेशन के सिद्धांत से, एक अतुल्यकालिक मोटर एक ट्रांसफार्मर के समान है। जैसा कि ट्रांसफार्मर में, मोटर के प्राथमिक घुमावदार की ऊर्जा - स्टेटर को माध्यमिक में स्थानांतरित किया जाता है - चुंबकीय क्षेत्र के माध्यम से रोटर।
प्रतिक्रियाशील शक्ति के उपभोक्ताओं के रूप में प्रेरण भट्टियां। उनके संचालन के लिए उच्च प्रतिक्रियाशील शक्ति की आवश्यकता वाले बड़े विद्युत रिसीवर में मुख्य रूप से धातुओं को गलाने के लिए औद्योगिक-आवृत्ति प्रेरण भट्टियां शामिल हैं। संक्षेप में, ये भट्टियां शक्तिशाली हैं, लेकिन ट्रांसफार्मर निर्माण ट्रांसफार्मर के दृष्टिकोण से बिल्कुल सही नहीं हैं, जिनमें से माध्यमिक घुमावदार धातु (चार्ज) है, जो इसमें प्रेरित धाराओं द्वारा पिघलाया जाता है।
कनवर्टर की स्थापनारेक्टिफायर की सहायता से प्रत्यावर्ती धारा को प्रत्यावर्ती धारा में परिवर्तित करना, प्रतिक्रियाशील शक्ति के बड़े उपभोक्ताओं से भी संबंधित है। रेक्टिफायर इकाइयां व्यापक रूप से उद्योग और परिवहन में उपयोग की जाती हैं। उदाहरण के लिए, पारा कन्वर्टर्स के साथ उच्च ऊर्जा संयंत्रों का उपयोग विद्युत इन्सुलेट स्नान करने के लिए किया जाता है, उदाहरण के लिए, हमारे देश में एल्यूमीनियम, कास्टिक सोडा, आदि के उत्पादन में रेलवे परिवहन लगभग पूरी तरह से विद्युतीकृत है, रेलवे के एक महत्वपूर्ण हिस्से के लिए प्रत्यक्ष वर्तमान कन्वर्टर्स हैं।
दूसरी ओर, डिस्ट्रिब्यूशन नेटवर्क (ट्रांसमिशन लाइन्स, स्टेप-अप और स्टेप-डाउन ट्रांसफॉर्मर) के तत्व, डिज़ाइन सुविधाओं के कारण, इंडक्टिव अनुदैर्ध्य प्रतिरोध है। इसलिए, यहां तक कि एक लोड के लिए जो केवल सक्रिय शक्ति का उपभोग करता है, वितरण नेटवर्क की शुरुआत में एक प्रेरक घटक होगा - प्रतिक्रियाशील शक्ति। इस प्रतिक्रियाशील शक्ति का परिमाण वितरण नेटवर्क के आगमनात्मक प्रतिरोध पर निर्भर करता है और इस वितरण नेटवर्क के तत्वों में होने वाले नुकसान पर पूरी तरह से खर्च होता है।
वास्तव में, सबसे सरल योजना के लिए:
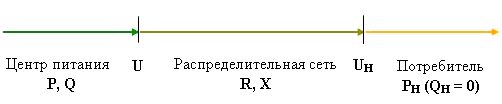
नतीजतन, भार की प्रकृति की परवाह किए बिना, प्रतिक्रियाशील शक्ति क्यू को विद्युत स्रोत से वितरण नेटवर्क में प्रेषित किया जाएगा। जब लोड मकसद होता है, तो स्थिति बिगड़ जाती है - शक्ति केंद्र में शक्ति का मान बढ़ता है और इसके बराबर हो जाता है: "
Р = Рн + (Рн² + Qн *) * R / Un (;
Q = Qn + (Rn² + Qn *) * X / Un (।
बिजली स्रोत से उपभोक्ता को प्रेषित प्रतिक्रियाशील शक्ति के निम्नलिखित नुकसान हैं:
δР = (Рн² + Qнδ) * R,
जिनमें से कुछ (और कभी-कभी महत्वपूर्ण) प्रतिक्रियाशील शक्ति के परिवहन से नुकसान होते हैं।
अन = यू - (पी * आर + क्यू * एक्स) / यू।
इस प्रकार, बिजली केंद्रों से उपभोक्ताओं तक वितरण नेटवर्क के माध्यम से प्रतिक्रियाशील शक्ति का परिवहन एक जटिल तकनीकी और आर्थिक समस्या बन जाता है, जिससे अर्थव्यवस्था और बिजली आपूर्ति प्रणालियों की विश्वसनीयता दोनों प्रभावित होती हैं।
वितरण नेटवर्क में इस समस्या का क्लासिक समाधान प्रतिक्रियाशील शक्ति के अतिरिक्त स्रोतों को स्थापित करके उपभोक्ता पर प्रतिक्रियाशील शक्ति की भरपाई करना है - उपभोक्ता स्थिरिकारक।
प्रतिक्रियाशील बिजली मुआवजा लागू:
सक्रिय शक्ति की कम खपत के कारण, निष्क्रिय या कम लोड होने पर इंजन का पावर फैक्टर बेहद कम होता है। प्रतिक्रियाशील मोटर प्रवाह सभी भारों पर लगभग स्थिर रहता है, जिससे कि कई अनलोड इंजन प्रतिक्रियाशील शक्ति की खपत के लिए जिम्मेदार होते हैं, जो पिछले अनुभागों में वर्णित कारणों से केवल स्थापना को प्रतिकूल रूप से प्रभावित करता है।
इसलिए, दो अच्छे नियम यह हैं कि अनलोड किए गए इंजनों को बंद कर दिया जाना चाहिए, और इंजनों की रेटेड शक्ति को ओवरस्टैट नहीं किया जाना चाहिए (क्योंकि इससे उनका भार कम हो जाएगा)।
KB को इंजन टर्मिनलों से सीधे जोड़ा जाना चाहिए।
इंजन को मुआवजा लागू करने के बाद, इंजन-कैपेसिटर इकाई का वर्तमान इंजन लोड के समान मोड के तहत मुआवजे से पहले कम हो जाएगा। ऐसा इसलिए है क्योंकि मोटर करंट के प्रतिक्रियाशील घटक के एक महत्वपूर्ण हिस्से को संधारित्र से आपूर्ति की जाती है, जैसा कि इसमें दिखाया गया है अंजीर। L23.
यदि मोटर और संधारित्र को जोड़ने से पहले मोटर की अधिकतम वर्तमान सुरक्षा स्थित है (यह हमेशा ऐसा होता है जब कैपेसिटर टर्मिनलों से जुड़े होते हैं), तो सुरक्षा रिले की सेटिंग्स को अनुपात से कम किया जाना चाहिए:
मुआवजा से पहले cos / मुआवजा के बाद cos φ
में दिखाए गए kvar के मूल्यों के अनुसार मुआवजे के साथ मोटर्स के लिए अंजीर। L24 (मानक एसिंक्रोनस मोटर्स के स्व-उत्तेजना को रोकने के लिए सुझाए गए अधिकतम मूल्य, जैसा कि एक प्रेरण मोटर के स्व-उत्तेजना को रोकने के अनुभागों में चर्चा की गई है), उपरोक्त अनुपात के मूल्यों को अलग-अलग गति के लिए दिया गया है। अंजीर। L25.
अंजीर। L23: मुआवजे से पहले, ट्रांसफार्मर सभी प्रतिक्रियाशील शक्ति को स्थानांतरित करता है, मुआवजे के बाद संधारित्र अधिकांश प्रतिक्रियाशील शक्ति की आपूर्ति करता है
| तीन-चरण मोटर्स, 230/400 वी | |||||
|---|---|---|---|---|---|
| रेटेड शक्ति | स्थापित पावर (kvar) | ||||
| रोटेशन की गति (आरपीएम) | |||||
| किलोवाट | अश्वशक्ति | 3000 | 1500 | 1000 | 750 |
| 22 | 30 | 6 | 8 | 9 | 10 |
| 30 | 40 | 7,5 | 10 | 11 | 12,5 |
| 37 | 50 | 9 | 11 | 12,5 | 16 |
| 45 | 60 | 11 | 13 | 14 | 17 |
| 55 | 75 | 13 | 17 | 18 | 21 |
| 75 | 100 | 17 | 22 | 25 | 28 |
| 90 | 125 | 20 | 25 | 27 | 30 |
| 110 | 150 | 24 | 29 | 33 | 37 |
| 132 | 180 | 31 | 36 | 38 | 43 |
| 160 | 218 | 35 | 41 | 44 | 52 |
| 200 | 274 | 43 | 47 | 53 | 61 |
| 250 | 340 | 52 | 57 | 63 | 71 |
| 280 | 380 | 57 | 63 | 70 | 79 |
| 355 | 482 | 67 | 76 | 86 | 98 |
| 400 | 544 | 78 | 82 | 97 | 106 |
| 450 | 610 | 87 | 93 | 107 | 117 |
अंजीर। L24: इंजन स्व-उत्तेजना के जोखिम के बिना व्यक्तिगत प्रतिक्रियाशील बिजली मुआवजे का अधिकतम kvar मूल्य
एक उच्च जड़ता लोड के साथ एक मोटर अपनी बिजली की आपूर्ति को बंद करने के बाद (जब तक कि इसे विशेष रूप से ब्रेक नहीं किया जाता है) घूमती रहेगी।
रोटर सर्किट की "चुंबकीय जड़ता" का मतलब शटडाउन के बाद थोड़े समय के लिए स्टेटर वाइंडिंग में ईएमएफ का निर्माण होता है, जो बिना मुआवजे के इंजन के मामले में 1 या 2 अवधि के बाद शून्य हो जाता है।
हालांकि, जुड़े कैपेसिटर ऐसे नम ईएमएफ के लिए तीन-चरण प्रतिक्रियाशील लोड बनाते हैं, जो स्टेटर वाइंडिंग में कैपेसिटिव धाराओं का कारण बनता है। स्टेटर में ऐसी धाराएँ एक घूर्णन चुंबकीय क्षेत्र बनाती हैं जो एक ही धुरी के साथ और एक ही दिशा में नम विद्युत चुम्बकीय क्षेत्र के रूप में कार्य करता है।
नतीजतन, रोटर फ्लक्स बढ़ता है, स्टेटर धाराओं में वृद्धि होती है, और मोटर टर्मिनलों पर वोल्टेज कभी-कभी खतरनाक रूप से उच्च स्तर तक बढ़ जाता है। इस घटना को स्व-उत्तेजना के रूप में जाना जाता है और एक कारण है कि वर्तमान जनरेटर को वैकल्पिक रूप से, एक नियम के रूप में, उन्नत शक्ति कारकों के साथ काम नहीं करते हैं, अर्थात्। सहज (और अनियंत्रित) स्व-उत्तेजना की प्रवृत्ति है।
टिप्पणी:
1. लोड की जड़ता द्वारा संचालित इंजन की विशेषताएं, इसकी सुस्ती विशेषताओं के समान कड़ाई से नहीं हैं। हालांकि, यह धारणा व्यावहारिक दृष्टिकोण से काफी सटीक है।
2. एक इंजन में एक जनरेटर के रूप में कार्य करने में, परिसंचारी धाराएं मुख्य रूप से प्रतिक्रियाशील होती हैं, इसलिए इंजन ब्रेकिंग (मंदी) का प्रभाव मुख्य रूप से इसके शीतलन प्रशंसक द्वारा दर्शाए गए लोड के कारण होता है।
3. वर्तमान (लैगिंग कोण लगभग 90 °) बिजली की स्रोत से सामान्य परिस्थितियों में अनलोड मोटर द्वारा खपत की जाती है, और एक जनरेटर के रूप में कार्य करने वाले करंटिटरों को आपूर्ति की जाने वाली धारा (अग्रिम कोण लगभग 90 °) का जनरेटर के टर्मिनलों पर वोल्टेज के साथ समान चरण संबंध होता है। यही कारण है कि एक चार्ट पर दो विशेषताओं को लगाया जा सकता है।
स्व-उत्तेजना को रोकने के लिए, जैसा कि ऊपर वर्णित है, संधारित्र बैंक की नाममात्र शक्ति (kvar) निम्नलिखित अधिकतम सीमा तक सीमित होनी चाहिए:
जहां Io इंजन का नो-लोड करंट है और अन इंटरपेज़ रेटेड मोटर वोल्टेज (केवी) है। अंजीर में। L24 इस मानदंड को पूरा करने वाले Qc मान प्रदान करता है।
उदाहरण:
तीन-चरण मोटर, 75 किलोवाट, 3000 आरपीएम, 400 वी, कैपेसिटर का एक ब्लॉक हो सकता है जो अंजीर के अनुसार 17 केवीआर से अधिक नहीं है। L24। सामान्य रूप से आवश्यक कॉस φ स्तर पर इंजन को पर्याप्त रूप से क्षतिपूर्ति करने के लिए टेबल मान आमतौर पर बहुत छोटा होता है। हालांकि, अतिरिक्त मुआवजे का भुगतान किया जा सकता है, उदाहरण के लिए, टीपी की बसों पर स्थापित केंद्रीयकृत मुआवजा केंद्र की मदद से।
मोटर्स द्वारा संचालित उच्च जड़ता भार के साथ किसी भी स्थापना में, ऐसे मोटर्स को नियंत्रित करने वाले स्विच या कॉन्टैक्टर्स को बिजली के पूर्ण नुकसान की स्थिति में जल्दी से डिस्कनेक्ट किया जाना चाहिए।
जब तक इस तरह की सावधानी नहीं बरती जाती है, तब तक अत्यधिक उच्च वोल्टेज (आत्म-उत्तेजना के कारण) की संभावना अधिक होती है, क्योंकि अन्य सभी डिजाइन ब्यूरो उच्च जड़ता कैपेसिटर के समानांतर नेटवर्क में काम करते हैं।
इसलिए, ऐसे मोटर्स के संरक्षण सर्किट में एक रिवर्स पावर कंट्रोल रिले के साथ एक अधिकतम वोल्टेज शटडाउन रिले होना चाहिए (मोटर जड़ता ऊर्जा से पहले शेष उपकरणों को बिजली की आपूर्ति करता है)।
यदि उच्च क्षमता वाली मोटर की क्षतिपूर्ति करने के लिए व्यक्तिगत कैपेसिटर की क्षमता अंजीर में अनुशंसित से अधिक है। L24, उन्हें एक स्विच या एक संपर्ककर्ता का उपयोग करके अलग से नियंत्रित किया जाना चाहिए जो मुख्य स्विच या मोटर कॉन्टैक्टर के साथ एक साथ यात्रा करता है, जैसा कि अंजीर में दिखाया गया है। L26।
कैपेसिटर चालू होने के बाद मुख्य संपर्ककर्ता चालू होता है।
अंजीर। L26: एक संधारित्र बैंक को इंजन से जोड़ना
अतुल्यकालिक मोटर प्रदर्शन घूर्णी गति n 2, the, उपयोगी क्षण (शाफ्ट पर टॉर्क) M 2, पॉवर फैक्टर cos ences, और स्टेटर करंट I 1 को नेट पॉवर P 2 पर U 1 = const f = "const" पर निर्भर करता है।
गति प्रतिक्रिया n 2 = f (P 2)। प्रेरण मोटर n 2 = n 1 (1 - s) के रोटर के रोटेशन की आवृत्ति।
स्लिप s = P e2 / P em, अर्थात्, और इसके रोटेशन की आवृत्ति रोटर में विद्युत चुम्बकीय शक्ति के विद्युत नुकसान के अनुपात से निर्धारित होती है। बेकार में रोटर में बिजली के नुकसान की उपेक्षा करते हुए, आप P e2 = 0 ले सकते हैं, और इसलिए s ≈ 0 और n 2 n n1।
इंडक्शन मोटर शाफ्ट पर भार बढ़ने के कारण, एस = पी ई 2 / पी एम बढ़ता है, नाममात्र भार पर 0.01 - 0.08 के मूल्यों तक पहुंच जाता है। तदनुसार, निर्भरता एन 2 = एफ (पी 2) एक वक्र है, जो कि एब्सिस्सा अक्ष के लिए थोड़ा झुकाव है। हालांकि, जैसे ही मोटर रोटर आर 2, का सक्रिय प्रतिरोध बढ़ता है, इस वक्र का ढलान बढ़ जाता है। इस मामले में, लोड पी 2 के उतार-चढ़ाव के साथ अतुल्यकालिक मोटर एन 2 की आवृत्ति में परिवर्तन होता है। यह इस तथ्य से समझाया गया है कि बढ़ते आर 2 or के साथ रोटर में बिजली की हानि बढ़ जाती है।
एम 2 की निर्भरता = एफ (पी 2)। शुद्ध शक्ति P 2 पर एक प्रेरण मोटर M 2 के शाफ्ट पर उपयोगी क्षण की निर्भरता अभिव्यक्ति M 2 = P 2 / = 2 = 60 P 2 / (2πn 2) = 9.55 Р 2 / n 2 से निर्धारित होती है, जहाँ Р 2 शुद्ध शक्ति, W है। ; ω 2 = 2ωf 2/60 - रोटर के रोटेशन की कोणीय आवृत्ति।
इस अभिव्यक्ति से यह निम्नानुसार है कि यदि n 2 = const है, तो ग्राफ M 2 = f 2 (P 2) एक सीधी रेखा है। लेकिन बढ़ते हुए पी 2 के साथ एक अतुल्यकालिक इंजन में रोटर की गति कम हो जाती है, और इसलिए बढ़ते लोड के साथ शाफ्ट एम 2 पर उपयोगी क्षण लोड की तुलना में कुछ अधिक तेजी से बढ़ता है, और इसलिए ग्राफ एम 2 = एफ (पी 2) में एक घुमावदार दृश्य है।
निर्भरता cos end 1 = f (P 2)। इस तथ्य के कारण कि स्टेटर वर्तमान I 1 में एक प्रतिक्रियाशील (आगमनात्मक) घटक है, जो स्टेटर में एक चुंबकीय क्षेत्र बनाने के लिए आवश्यक है, अतुल्यकालिक मोटर्स का शक्ति कारक एक से कम है। पावर फैक्टर का सबसे छोटा मान निष्क्रिय मोड से मेल खाता है। यह इस तथ्य से समझाया गया है कि विद्युत मोटर I 0 का नो-लोड वर्तमान किसी भी लोड के तहत लगभग अपरिवर्तित रहता है। इसलिए, कम इंजन भार पर, स्टेटर करंट कम होता है और काफी हद तक प्रतिक्रियाशील होता है (I 1 low I 0)। नतीजतन, वोल्टेज के सापेक्ष स्टेटर चालू की चरण पारी महत्वपूर्ण है (phase 1 ≈) 0), जो केवल 90 ° से थोड़ा कम है।
निष्क्रिय मोड में अतुल्यकालिक मोटर्स का शक्ति कारक आमतौर पर 0.2 से अधिक नहीं होता है। जैसे ही मोटर शाफ्ट पर लोड बढ़ता है, वर्तमान I 1 का सक्रिय घटक बढ़ता है और पावर फैक्टर बढ़ता है, नाममात्र एक के करीब लोड के साथ अधिकतम मूल्य (0.80 - 0.90) तक पहुंचता है। मोटर शाफ्ट पर लोड में एक और वृद्धि कॉस φ 1 में कमी के साथ होती है, जिसे रोटर (x2s) में वृद्धि के कारण समझाया जाता है ताकि स्लिप में वृद्धि हो और, परिणामस्वरूप, रोटर में वर्तमान की आवृत्ति।
अतुल्यकालिक मोटर्स के शक्ति कारक को बढ़ाने के लिए, यह बेहद महत्वपूर्ण है कि मोटर हमेशा काम करता है, या कम से कम समय का काफी हिस्सा, नाममात्र के करीब लोड के साथ। यह केवल अधिकार के साथ प्राप्त किया जा सकता है। यदि इंजन अंडरलोड किए गए समय का एक महत्वपूर्ण हिस्सा काम करता है, तो कॉस, 1 को बढ़ाने के लिए, इंजन को वोल्टेज यू 1 को कम करना उचित है। उदाहरण के लिए, स्टेटर वाइंडिंग को जोड़ने पर काम करने वाले इंजनों में, स्टेटर वाइंडिंग्स को फिर से कनेक्ट करके किया जा सकता है, जिसके कारण फ़ैक्टर वोल्टेज में कमी होगी। इस मामले में, स्टेटर के चुंबकीय प्रवाह, और, परिणामस्वरूप, चुंबकीयकरण धारा, के एक कारक द्वारा लगभग घट जाती है। इसके अलावा, स्टेटर करंट का सक्रिय घटक थोड़ा बढ़ जाता है। यह सब इंजन पावर फैक्टर को बढ़ाने में योगदान देता है।

ऐसी कई परिस्थितियां हैं जहां यह जानना उपयोगी होगा कि मल्टीमीटर के साथ प्रतिरोध को कैसे मापें और क्या कोई अंतर है कि कैसे ...
शिक्षा की स्थापना "स्मारक राज्य का संग्रह" विद्युत स्रोत के इलेक्ट्रो-बढ़ते बिजली की निकासी ...

स्टेटर चरण घुमावदार में ओपन सर्किट। यदि दोनों चरण टूट गए हैं, तो जनरेटर बिल्कुल काम नहीं करेगा। यदि आप पहले से ही ...

व्लादिमीर Malafeev प्रमाणित व्यापार कोच। वह जानता है कि हर किसी के लिए इसे समझना बहुत मुश्किल है। जोड़ता है ...
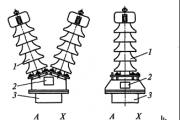
उद्देश्य के आधार पर, विभिन्न घुमावदार कनेक्शन सर्किट वाले वोल्टेज ट्रांसफार्मर का उपयोग किया जा सकता है। इसके अतिरिक्त, ...

हर कोई जानता है कि कारें जल्दी या बाद में टूट जाती हैं। लेकिन कभी-कभी मोटर चालक को इस तरह की समस्या का सामना करना पड़ता है ...
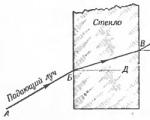
प्रकाश की एक किरण, एक पारदर्शी माध्यम से दूसरे में जा रही है, अपनी दिशा बदलती है, या, जैसा कि वे कहते हैं, ...
एक अतुल्यकालिक मोटर के प्रदर्शन को दक्षता की निर्भरता कहा जाता है yn, ...
संघीय शिक्षा के लिए एजेंसी GOU VPO "यूराल राज्य तकनीकी विश्वविद्यालय -...
आज, प्रौद्योगिकी के इतनी तेजी से विकास के साथ, यह जानना बहुत महत्वपूर्ण है कि कार इलेक्ट्रिकल सर्किट कैसे पढ़ें। और नहीं ...

एक घर बनाने और अपने क्षेत्र के उपकरण के मामले में, कई मुद्दे महत्वपूर्ण हैं। सहित से दूरी ...
C (कार्बोनियम), आवधिक प्रणाली के समूह IVA (C, Si, Ge, Sn, Pb) के गैर-धातु रासायनिक तत्व ...

पृष्ठभूमि के एक बिट। हमारे मंच पर एक दाने वादा करने के बारे में जल्दबाज दंभ के बारे में वादा ...

अतीत की तुलना में IzhSTU, अलेक्जेंडर Gubert की चयन समिति के कार्यकारी सचिव के अनुसार ...

T8 श्रृंखला के लैंप एलईडी और ल्यूमिनसेंट प्रकार के जारी किए जाते हैं। उनकी दहलीज वोल्टेज है ...
ऑप्टोमेट्री के लिए सबसे बड़ा मूल्य लेंस के माध्यम से प्रकाश का मार्ग है। लेंस को पारदर्शी शरीर कहा जाता है ...