Shtokman गैस घनीभूत क्षेत्र के लिए एकीकृत विकास परियोजना
/ 30.07.2010 / श्टोकमैन गैस संघनन क्षेत्र अंजीर। 1. तेल और गैस का सामान्य लेआउट ...
इंडक्शन मोटर है स्थिर
भाग कहा जाता है स्टेटर
, और रोटरी
भाग कहा जाता है रोटार
। स्टेटर में एक घुमावदार बनाया जाता है, एक घूर्णन चुंबकीय क्षेत्र बनाता है।
गिलहरी-पिंजरे और चरण रोटर के साथ अतुल्यकालिक मोटर्स को भेद करें।
गिलहरी-पिंजरे रोटर के खांचे में, एल्यूमीनियम या तांबे की छड़ें रखी जाती हैं। सिरों पर, छड़ें एल्यूमीनियम या तांबे के छल्ले द्वारा बंद कर दी जाती हैं। एड़ी और मौजूदा नुकसान को कम करने के लिए स्टेटर और रोटर को विद्युत स्टील की चादरों से खींचा जाता है।
चरण रोटर में तीन-चरण घुमावदार (तीन-चरण मोटर के लिए) है। चरणों के सिरे एक सामान्य नोड से जुड़े होते हैं, और शुरुआत शाफ्ट पर रखी गई तीन संपर्क रिंगों से होती है। निश्चित संपर्क ब्रश के छल्ले पर लागू होते हैं। एक शुरुआती रियोस्टैट ब्रश से जुड़ा हुआ है। इंजन शुरू करने के बाद, शुरुआती रिओस्टेट का प्रतिरोध सुचारू रूप से शून्य हो जाता है।
चित्र 12.4 में दिखाए गए मॉडल पर एक प्रेरण मोटर के संचालन के सिद्धांत पर विचार किया जाएगा।
 . (12.2)
. (12.2)
पर्ची शून्य के बराबर नहीं हो सकती है, क्योंकि एक ही क्षेत्र में और रोटर गति को रोटर में शामिल करने की गति को रोक देगा और इसलिए, कोई विद्युत चुम्बकीय टोक़ नहीं होगा।
घूर्णन विद्युत चुम्बकीय क्षण प्रतिसादन ब्रेकिंग पल एम एम \u003d एम 2 द्वारा संतुलित है।
मोटर शाफ्ट पर भार में वृद्धि के साथ, ब्रेकिंग टोक़ टोक़ से अधिक हो जाता है, और पर्ची बढ़ जाती है। इसके परिणामस्वरूप, रोटर घुमावदार वृद्धि में प्रेरित ईएमएफ और धाराएं। टॉर्क बढ़ता है और ब्रेकिंग टॉर्क के बराबर हो जाता है। बढ़ती हुई पर्ची के साथ टोक़ एक निश्चित अधिकतम मूल्य तक बढ़ सकता है, जिसके बाद ब्रेकिंग टॉर्क में और वृद्धि के साथ, टोक़ तेजी से घटता है, और इंजन बंद हो जाता है।
ब्रेक वाले इंजन की स्लिप एक के बराबर होती है। वे कहते हैं कि इंजन शॉर्ट सर्किट मोड में है।
अनलोड किए गए प्रेरण मोटर n 2 की रोटेशन आवृत्ति तुल्यकालिक आवृत्ति 1 के लगभग बराबर है। एक अनलोड इंजन S & asimp का स्लिंग; 0. वे कहते हैं कि इंजन निष्क्रिय है।
मोटर मोड में चलने वाली एक अतुल्यकालिक मशीन की पर्ची शून्य से एक तक भिन्न होती है।
एक एसिंक्रोनस मशीन जनरेटर मोड में काम कर सकती है। ऐसा करने के लिए, इसके रोटर को स्टेटर चुंबकीय क्षेत्र के घूर्णन की दिशा में एक आवृत्ति n 2\u003e n 1 के साथ तीसरे पक्ष के इंजन द्वारा घुमाया जाना चाहिए। अतुल्यकालिक जनरेटर पर्ची  .
.
एक एसिंक्रोनस मशीन एक इलेक्ट्रिक मशीन ब्रेक के मोड में काम कर सकती है। ऐसा करने के लिए, स्टेटर के चुंबकीय क्षेत्र के रोटेशन की दिशा के विपरीत दिशा में इसके रोटर को घुमाना आवश्यक है।
इस मोड में S\u003e 1. एक नियम के रूप में, एसिंक्रोनस मशीनों का उपयोग मोटर मोड में किया जाता है। इंडक्शन मोटर उद्योग में सबसे आम प्रकार की मोटर है। एक प्रेरण मोटर में क्षेत्र के रोटेशन की आवृत्ति सख्ती नेटवर्क एफ 1 की आवृत्ति और स्टेटर डंडे के जोड़े की संख्या से संबंधित है। आवृत्ति 1 1 \u003d 50 हर्ट्ज पर, घूर्णी गति की निम्नलिखित श्रृंखला मौजूद है।
| पी | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| एन 1 आरपीएम | 3 000 | 1500 | 1000 | 750 |
रोटर और स्टेटर पोल विद्युत चुम्बकीय रूप से घूर्णन कर रहे हैं
परिमाण में समान क्षण और विपरीत दिशाओं में निर्देशित।
स्टेटर पोल को एक समकालिक आवृत्ति के साथ घुमाने के लिए आवश्यक शक्ति,
 ,
,
कोणीय वेग कहाँ है।
रोटर द्वारा विकसित यांत्रिक शक्ति,

जहाँ  - रोटर का कोणीय वेग।
- रोटर का कोणीय वेग।
बिजली का अंतर
जहां पी ई 2 - रोटर वाइंडिंग में बिजली के नुकसान;
एम 2 रोटर वाइंडिंग के चरणों की संख्या है;
आर 2 रोटर वाइंडिंग का सक्रिय प्रतिरोध है;
I 2 रोटर करंट है।
कहाँ से?
 (12.7).
(12.7).
 .
.
जहां, सीटी एक लॉक रोटर के साथ इंजन का परिवर्तन गुणांक है।
 (12.8).
(12.8).
जहाँ  एक स्थिर है।
एक स्थिर है।
अंजीर में। 12.5 एक ठोस रेखा के रूप में फिसलने पर विद्युत चुम्बकीय क्षण की निर्भरता को दर्शाता है।
बता दें कि इस इंजन द्वारा रोटेशन को प्रेरित किया गया एक्ट्यूएटर एक ब्रेकिंग टॉर्क एम 2 बनाता है।
अंजीर में 12.5, दो बिंदु हैं जिनके लिए समानता एम एम \u003d एम 2
;
ये बिंदु हैं और
और में
.
बिंदु पर और
इंजन stably चलाता है। यदि इंजन, किसी भी कारण के प्रभाव में, रोटेशन की आवृत्ति कम कर देता है, तो इसकी पर्ची बढ़ जाएगी, इसके साथ ही टोक़ में वृद्धि होगी। इसके कारण, इंजन की गति बढ़ जाएगी और संतुलन फिर से बहाल हो जाएगा एम एम \u003d एम 2
;.
बिंदु पर में
इंजन संचालन स्थिर नहीं हो सकता है: रोटेशन की गति का एक यादृच्छिक विचलन या तो इंजन को रोक देगा या इसे एक बिंदु पर ले जाएगा और
.
नतीजतन, विशेषता की पूरी आरोही शाखा इंजन के स्थिर संचालन का क्षेत्र है, और संपूर्ण अवरोही भाग अस्थिर संचालन का क्षेत्र है। बिंदु ख
अधिकतम क्षण के अनुरूप, स्थिर और अस्थिर काम के क्षेत्रों को विभाजित करता है।
टोक़ का अधिकतम मूल्य महत्वपूर्ण पर्ची से मेल खाता है एस के
। सरकना एस \u003d 1
शुरुआती क्षण से मेल खाती है। यदि काउंटरिंग ब्रेकिंग टॉर्क एम 2
एमपी शुरू करने से अधिक, चालू होने पर इंजन शुरू नहीं होगा, यह स्थिर रहेगा।
हम इस प्रकार अधिकतम पल पाते हैं। सबसे पहले, हम उस महत्वपूर्ण स्लिप वैल्यू को निर्धारित करते हैं, जिस पर फंक्शन होता है एम उम
अधिकतम होगा। इसके लिए, स्लिप फ़ंक्शन का पहला व्युत्पन्न एस
अभिव्यक्ति (12.8) से हम शून्य के बराबर हैं।
कहाँ से?
महत्वपूर्ण स्लिप वैल्यू को सूत्र (12.8) में बदलकर, हम प्राप्त करते हैं
 . (12.10)
. (12.10)
सूत्र (12.8), (12.9), (12.10) से यह देखा जाता है:
एक प्रेरण मोटर की यांत्रिक विशेषता शाफ्ट एन 2 \u003d एफ (एम 2) पर पल में इंजन की गति की निर्भरता है। यांत्रिक विशेषता U 1 - कॉन्स्टेंस, f 1 - कॉन्स्टेंस स्थिति के तहत प्राप्त की जाती है। इंजन की यांत्रिक विशेषता एक अलग पैमाने पर निर्मित, फिसलने पर टोक़ की निर्भरता है। अंजीर में। 12.6 एक प्रेरण मोटर की एक विशिष्ट यांत्रिक विशेषता को दर्शाता है। प्रारंभिक मोड में मशीन के एयर गैप में परिणामस्वरूप, या मुख्य, चुंबकीय प्रवाह, साथ ही स्टेटर और रोटर ई 1 और ई 2 में ईएमएफ काफी कम हो जाता है। इससे मोटर के शुरुआती टॉर्क में कमी होती है और शुरुआती करंट में तेज बढ़ोतरी होती है।
- अधिकतम टोक़ का परिमाण रोटर सर्किट के सक्रिय प्रतिरोध पर निर्भर नहीं करता है;
- रोटर श्रृंखला के सक्रिय प्रतिरोध में वृद्धि के साथ, अधिकतम टोक़, मूल्य में बदलाव के बिना, बड़ी स्लिप के क्षेत्र में स्थानांतरित हो जाता है (चित्र 12 की वक्र 1 देखें)।
- टोक़ मुख्य वोल्टेज के वर्ग के लिए आनुपातिक है।
 . (12.11)
. (12.11)
सूत्र (12.11) से यह देखा जा सकता है कि इंडक्शन मोटर की गति को तीन तरीकों से बदला जा सकता है:
प्रेरण मोटर्स डिजाइन में सरल और विश्वसनीय हैं। प्रेरण मोटर्स का नुकसान उनकी गति को विनियमित करने में कठिनाई है।
- आपूर्ति वोल्टेज की आवृत्ति में परिवर्तन;
- मोटर पोल की संख्या में बदलाव। इसके लिए, स्टेटर स्लॉट्स में एक विंडिंग रखी गई है, जिसे अलग-अलग संख्या में डंडे पर स्विच किया जा सकता है;
- पर्ची का परिवर्तन। इस पद्धति को चरण रोटर के साथ अतुल्यकालिक मोटर्स में लागू किया जा सकता है। इसके लिए, रोटर सर्किट में एक समायोजन रिओस्टेट शामिल किया गया है। रोटर श्रृंखला के सक्रिय प्रतिरोध में वृद्धि से एस टू एस जी से स्लिप में वृद्धि होती है (चित्र 12.5 देखें), और, परिणामस्वरूप, इंजन की गति में कमी।
एकल-चरण मोटर में स्टेटर पर स्थित एक घुमावदार होता है। बारी-बारी से चालू होने वाला एकल-चरण घुमावदार एक स्पंदित चुंबकीय क्षेत्र पैदा करेगा। हम इस क्षेत्र में एक शॉर्ट-सर्कुलेटिंग घुमावदार के साथ एक रोटर लगाते हैं। रोटर घूमेगा नहीं। यदि आप किसी भी दिशा में बाहरी यांत्रिक बल के साथ रोटर को स्पिन करते हैं, तो इंजन सख्ती से काम करेगा।
इसे इस प्रकार समझाया जा सकता है।
स्पंदित चुंबकीय क्षेत्र को दो चुंबकीय क्षेत्रों द्वारा प्रतिस्थापित किया जा सकता है,
एक समकालिक आवृत्ति n 1 के साथ विपरीत दिशाओं में घूमना और स्पंदनशील क्षेत्र के चुंबकीय प्रवाह के आधे आयाम के बराबर चुंबकीय प्रवाह के आयाम। चुंबकीय क्षेत्रों में से एक को आगे-घूर्णन कहा जाता है, दूसरे को रिवर्स-रोटेटिंग कहा जाता है। प्रत्येक चुंबकीय क्षेत्र रोटर वाइंडिंग में एड़ी धाराओं को प्रेरित करता है। चुंबकीय क्षेत्रों के साथ एड़ी धाराओं की बातचीत के दौरान, टॉर्क्स उत्पन्न होते हैं जो एक दूसरे के विपरीत निर्देशित होते हैं।
अंजीर में। 12.7 प्रत्यक्ष क्षेत्र M पर पल की निर्भरता को दर्शाता है ”, जिस क्षण
रिवर्स फील्ड M "और परिणामी क्षण M, स्लिप फंक्शन M \u003d M" - M "में।
स्लाइडिंग कुल्हाड़ियों को एक दूसरे के लिए काउंटर निर्देशित किया जाता है।
शुरुआती मोड में, रोटर उन टोरों से प्रभावित होता है जो परिमाण में समान होते हैं और दिशा में विपरीत होते हैं।
हम रोटर को स्पिनिंग चुंबकीय क्षेत्र की दिशा में एक बाहरी बल के साथ स्पिन करते हैं। एक अतिरिक्त (परिणामस्वरूप) टोक़ प्रकट होता है, रोटर को सिंक्रोनस के करीब गति को तेज करता है। इस मामले में, आगे-घूमने वाले चुंबकीय क्षेत्र के सापेक्ष इंजन की पर्ची
![]() .
.
रिवर्स मैग्नेटिक फील्ड के सापेक्ष मोटर स्लिप
 .
.
परिणामी विशेषता को ध्यान में रखते हुए, हम निम्नलिखित निष्कर्ष निकाल सकते हैं:
1. सिंगल-फेज मोटर में स्टार्टिंग टॉर्क नहीं होता है। यह उस दिशा में घूमेगा जिसमें यह एक बाहरी बल द्वारा अपरिवर्तित है।एक शुरुआती टोक़ बनाने के लिए, एकल-चरण मोटर्स 90 डिग्री से मुख्य कामकाजी घुमावदार से एक स्थानिक घुमावदार घुमाव से लैस हैं। प्रारंभिक घुमावदार चरण-शिफ्टिंग तत्वों के माध्यम से नेटवर्क से जुड़ा हुआ है: एक संधारित्र या सक्रिय प्रतिरोध।
2. रिवर्स-घूर्णन क्षेत्र के ब्रेकिंग प्रभाव के कारण, एकल-चरण मोटर की विशेषताएं तीन-चरण से भी बदतर हैं।
अंजीर में आरेख में। 12.9 ए स्टेटर वाइंडिंग्स एक तारे से जुड़े होते हैं।
अंजीर में आरेख में। 12.9 बी स्टेटर वाइंडिंग्स एक त्रिकोण द्वारा जुड़े हुए हैं। कैपेसिटेंस C ≈ 60 माइक्रॉफ़ारड प्रति 1 किलोवाट शक्ति का मान।
अतुल्यकालिक मोटर गति
n \u003d n 1 (1 - s) \u003d (60f 1 / p) (1-s) (85)
यह अभिव्यक्ति दर्शाती है कि आवृत्ति को बदलकर इसे समायोजित किया जा सकता है च १ आपूर्ति वोल्टेज, डंडे के जोड़े की संख्या आर और
सरकना s। शाफ्ट एम एक्सट और फ्रिक्वेंसी एफ 1 पर पल के निर्दिष्ट मूल्यों पर बाद को रोस्टोर वाइंडिंग सर्किट से रिओस्टेट को जोड़कर बदला जा सकता है।
आपूर्ति वोल्टेज की आवृत्ति को बदलकर विनियमन।इस पद्धति के लिए एक आवृत्ति कनवर्टर की आवश्यकता होती है, जिसमें एक प्रेरण मोटर जुड़ा होना चाहिए। नियंत्रित सेमीकंडक्टर वाल्व (थायरिस्टर्स) के आधार पर, स्थिर आवृत्ति कन्वर्टर्स बनाए गए थे और अतुल्यकालिक मोटर्स के साथ कई प्रायोगिक इलेक्ट्रिक लोकोमोटिव और डीजल लोकोमोटिव का निर्माण किया गया था, जिसकी गति आपूर्ति वोल्टेज की आवृत्ति को बदलकर विनियमित की जाती है। प्रेरण मोटर के रोटर की घूर्णी गति को नियंत्रित करने की यह विधि बहुत आशाजनक है।
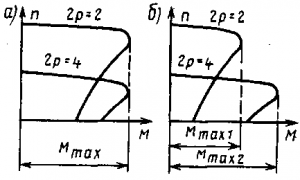
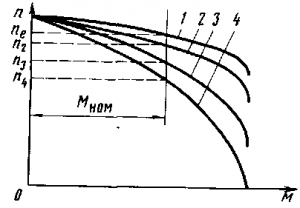
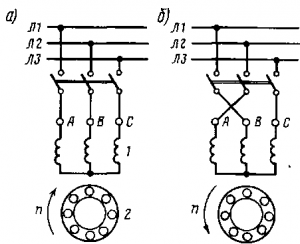
पोल जोड़े की संख्या में परिवर्तन करके विनियमन। यह विधि गति में एक कदम परिवर्तन प्राप्त करने की अनुमति देती है। इस प्रयोजन के लिए, एक चरण (चित्र। 266) सहित व्यक्तिगत कॉयल 1, 2 और 3, 4, को स्विच किया जाता है ताकि उनमें वर्तमान की दिशा तदनुसार बदलती रहे (उदाहरण के लिए, धारावाहिक व्यंजन कनेक्शन से आगामी एक तक)। जब कॉइल को सहमति पर स्विच किया जाता है (चित्र 266, ए), डंडों की संख्या चार है, और जब फिर से चालू किया जाता है (छवि 266, बी), दो। 120 ° से अंतरिक्ष में स्थानांतरित अन्य दो चरणों के कॉइल, उसी तरह से जुड़े हुए हैं। ध्रुवों की संख्या में समान कमी को धारावाहिक से समानांतर में कुंडल स्विच करके प्राप्त किया जा सकता है। जब ध्रुवों की संख्या में परिवर्तन होता है, तो मोटर के चुंबकीय क्षेत्र की घूर्णी गति n 1 बदल जाती है, और इसलिए इसके रोटर की घूर्णी गति n। यदि आपको रोटेशन एन 1 की तीन या चार गतिएं करने की आवश्यकता है, तो स्टेटर पर एक और वाइंडिंग होती है, जिसे स्विच करते समय आप दो और आवृत्तियों प्राप्त कर सकते हैं। ऐसे इंजन हैं जो घूर्णी गति n 1 में निरंतर अधिकतम टोक़ में या लगभग स्थिर शक्ति (चित्र 267) में परिवर्तन प्रदान करते हैं।
एक प्रेरण मोटर में, रोटर के ध्रुवों की संख्या स्टेटर के ध्रुवों की संख्या के बराबर होनी चाहिए। एक गिलहरी-पिंजरे रोटर में, यह स्थिति स्वचालित रूप से संतुष्ट हो जाती है और स्टेटर वाइंडिंग को स्विच करते समय, रोटर वाइंडिंग में किसी भी बदलाव की आवश्यकता नहीं होती है।
एक चरण रोटर के साथ एक इंजन में, इस मामले में, रोटर घुमावदार के ध्रुवों की संख्या को बदलना आवश्यक होगा, जो इसके डिजाइन को बहुत जटिल करेगा, इसलिए, घूर्णी गति को नियंत्रित करने की इस पद्धति का उपयोग केवल शॉर्ट-सर्किट रोटर वाले इंजनों में किया जाता है। इस तरह के इंजनों में सामान्य उपयोग के इंजनों की तुलना में बड़े समग्र आयाम और वजन होता है, और इसलिए, एक बड़ी लागत। इसके अलावा, विनियमन बड़े चरणों में किया जाता है; एक आवृत्ति f 1 \u003d 50 हर्ट्ज पर, 3000: 1500: 1000: 750 के अनुपात में परिवर्तन स्विच करने के दौरान क्षेत्र 1 के रोटेशन की आवृत्ति।
रोटर सर्किट में एक रिओस्टेट को शामिल करके विनियमन। जब अलग प्रतिरोध (आर p4, R pZ, R P2, आदि) के साथ एक रिओस्टेट को रोटर के घुमावदार सर्किट में शामिल किया जाता है, तो हम मोटर 4, 3 और 2 के कई रिओस्टैटिक यांत्रिक विशेषताओं को प्राप्त करते हैं। उसी समय, कम घूर्णी गति n 4, n 3, n 2, और इसी तरह, आवृत्ति n e की तुलना में जब इंजन प्राकृतिक विशेषता 1 (R p \u003d 0 पर) चल रहा होता है, तो कुछ भार क्षण M nom (चित्र। 268) के अनुरूप होगा। इस नियंत्रण विधि का उपयोग केवल मोटर के लिए एक चरण रोटर के साथ किया जा सकता है। यह आपको आसानी से एक विस्तृत श्रृंखला में गति को बदलने की अनुमति देता है। इसके नुकसान विनियमन रिओस्टेट में बड़े ऊर्जा नुकसान हैं, इसलिए इसका उपयोग केवल अल्पकालिक इंजन ऑपरेशन मोड (स्टार्ट-अप, आदि) के लिए किया जाता है।
रोटेशन की दिशा में परिवर्तन।मोटर के रोटेशन की दिशा बदलने के लिए, आपको स्टेटर वाइंडिंग द्वारा बनाए गए चुंबकीय क्षेत्र के रोटेशन की दिशा को बदलने की आवश्यकता है। यह स्टेटर वाइंडिंग के चरणों में वर्तमान के प्रत्यावर्तन के क्रम को बदलकर प्राप्त किया जाता है। उदाहरण के लिए, यदि वर्तमान मैक्सिमा निम्नलिखित क्रम में स्टेटर वाइंडिंग 1 (छवि। 269, ए) के चरणों में प्रवेश करती है: चरण ए - चरण बी - चरण सी, तो मोटर का रोटर 2 दक्षिणावर्त घुमाएगा। यदि आप उन्हें निम्नलिखित अनुक्रम में जमा करते हैं: चरण बी - चरण ए - चरण सी, तो रोटर वामावर्त घूमना शुरू कर देगा। इस प्रयोजन के लिए, किसी भी दो चरणों (तारों) को स्विच करके नेटवर्क के साथ स्टेटर वाइंडिंग्स के कनेक्शन आरेख को बदलना आवश्यक है। उदाहरण के लिए, स्टेटर वाइंडिंग का क्लैम्प ए, जो पहले लीनियर वायर एल 1 से जुड़ा था, को तार एल 2 में स्विच किया जाना चाहिए, और इस वाइंडिंग के क्लैंप बी को एल 2 से पहले जोड़ा जाना चाहिए, तार एल 1 (छवि 269, बी) में स्विच किया जाना चाहिए। इस तरह के स्विच को पारंपरिक स्विच द्वारा किया जा सकता है।
इलेक्ट्रिक मोटर्स। प्रेरण मोटर
प्रेरण मोटर इलेक्ट्रिक मशीनों को कम से कम दो वाइंडिंग कहा जाता है जिसमें वैकल्पिक वोल्टेज एक दूसरे के सापेक्ष चरण शिफ्ट किए जाते हैं।
संचालन का सिद्धांत
अतुल्यकालिक प्रणालियों में, यांत्रिक रूप से स्थिर डिवाइस में घूर्णन चुंबकीय क्षेत्र बनाना संभव हो जाता है। एक वैकल्पिक वर्तमान स्रोत से जुड़ा एक तार एक स्पंदित चुंबकीय क्षेत्र बनाता है, अर्थात, एक चुंबकीय क्षेत्र जो मूल्य और दिशा में बदलता है।
अंजीर। 16.6। मोटर कॉइल को तीन-चरण वोल्टेज स्रोत से जोड़ना
अंजीर। 16.7। तीन-चरण प्रणाली की अनुसूची धाराएं
एक आंतरिक व्यास डी के साथ एक सिलेंडर में, तीन कॉइल सतह पर रखे जाते हैं, जो एक दूसरे से 120 ° से स्थानिक रूप से ऑफसेट होते हैं। कॉइल तीन-चरण वोल्टेज स्रोत (छवि 16.6) से जुड़े हुए हैं। अंजीर में। 16.7 एक तीन-चरण प्रणाली बनाने वाले तात्कालिक धाराओं का एक ग्राफ दिखाता है।
प्रत्येक कॉइल एक स्पंदित चुंबकीय क्षेत्र बनाता है। कॉइल के चुंबकीय क्षेत्र, एक दूसरे के साथ बातचीत करते हुए, परिणामस्वरूप घूर्णन चुंबकीय क्षेत्र बनाते हैं, जिसके परिणामस्वरूप चुंबकीय प्रेरण का एक वेक्टर होता है।
अंजीर में। 16.8 प्रत्येक चरण के चुंबकीय प्रेरण वैक्टर और परिणामस्वरूप वेक्टर का निर्माण तीन बार इंस्टेंट टी 1, टी 2, टी 3 से पता चलता है। कॉइल के अक्षों की सकारात्मक दिशाएं +1, +2, +3 द्वारा इंगित की जाती हैं।
समय t \u003d t 1 पर, कॉइल AX में करंट और मैग्नेटिक इंडक्शन पॉजिटिव और मैक्सिमम होते हैं, कॉइल B-Y और C-Z में वे समान और निगेटिव होते हैं। परिणामस्वरूप चुंबकीय प्रेरण का वेक्टर कॉइल के चुंबकीय प्रेरण के वैक्टर के ज्यामितीय योग के बराबर होता है और कुंडल कुल्हाड़ी के अक्ष के साथ मेल खाता है। समय पर t \u003d t 2, कुंडल कुल्हाड़ी और CZ में धाराएं परिमाण में समान हैं और दिशा में विपरीत हैं। चरण बी में वर्तमान शून्य है। परिणामस्वरूप चुंबकीय प्रेरण वेक्टर घड़ी की दिशा में 30 ° हो गया।
अंजीर। 16.8। समय में तीन बिंदुओं के लिए चुंबकीय प्रेरण वैक्टर
समय t \u003d t 3 पर, कॉइल A-X और B-Y में धाराएं परिमाण और धनात्मक में समान होती हैं, चरण C-Z में करंट अधिकतम और ऋणात्मक होता है, जिसके परिणामस्वरूप चुंबकीय क्षेत्र का सदिश कुंडल C-Z के अक्ष की ऋणात्मक दिशा में रखा जाता है। वैकल्पिक वर्तमान अवधि के दौरान, परिणामस्वरूप चुंबकीय क्षेत्र का वेक्टर 360 ° घूमेगा। चुंबकीय प्रेरण वेक्टर के रैखिक वेग
वैकल्पिक वोल्टेज की आवृत्ति कहां है; टी साइनसोइडल वर्तमान की अवधि है; पीजी - चुंबकीय क्षेत्र के रोटेशन की आवृत्ति या रोटेशन की तुल्यकालिक आवृत्ति। टी अवधि के दौरान, चुंबकीय क्षेत्र एक दूरी पर जाता है जहां
ध्रुव विभाजन या चुंबकीय के ध्रुवों के बीच की दूरी
एक व्यास डी के साथ एक सिलेंडर की परिधि के साथ क्षेत्र।
से रैखिक गति
जहाँ n 1 एक बहुध्रुवीय चुंबकीय क्षेत्र के ध्रुवों के युग्मों की संख्या के साथ घूमने की तुल्यकालिक आवृत्ति है।
अंजीर में दिखाए गए कॉइल। 16.6, एक द्विध्रुवीय चुंबकीय क्षेत्र बनाएं, जिसमें ध्रुवों की संख्या 2P \u003d 2. क्षेत्र के रोटेशन की आवृत्ति 3000 आरपीएम है। चार-पोल चुंबकीय क्षेत्र प्राप्त करने के लिए, सिलेंडर के अंदर छह कॉइल को डी के व्यास के साथ रखना आवश्यक है, प्रत्येक चरण के लिए दो। फिर, सूत्र (16.7) के अनुसार, चुंबकीय क्षेत्र एन 1 \u003d 1500 आरपीएम के साथ, दो बार धीरे-धीरे घूमेगा।
एक घूर्णन चुंबकीय क्षेत्र प्राप्त करने के लिए, दो शर्तों को पूरा करना होगा:
डिज़ाइन
इंडक्शन मोटर में एक निश्चित भाग होता है जिसे स्टेटर कहा जाता है और घूर्णन वाला भाग जिसे रोटर कहा जाता है। स्टेटर में एक घुमावदार बनाया जाता है, एक घूर्णन चुंबकीय क्षेत्र बनाता है। गिलहरी-पिंजरे और चरण रोटर के साथ अतुल्यकालिक मोटर्स को भेद करें। गिलहरी-पिंजरे रोटर के खांचे में, एल्यूमीनियम या तांबे की छड़ें रखी जाती हैं। सिरों पर, छड़ें एल्यूमीनियम या तांबे के छल्ले द्वारा बंद कर दी जाती हैं। एड़ी और मौजूदा नुकसान को कम करने के लिए स्टेटर और रोटर को विद्युत स्टील की चादरों से खींचा जाता है। चरण रोटर में तीन-चरण घुमावदार (तीन-चरण मोटर के लिए) है। चरणों के सिरे एक सामान्य नोड से जुड़े होते हैं, और शुरुआत शाफ्ट पर रखी गई तीन संपर्क रिंगों से होती है। निश्चित संपर्क ब्रश के छल्ले पर लागू होते हैं। एक शुरुआती रियोस्टैट ब्रश से जुड़ा हुआ है। इंजन शुरू करने के बाद, शुरुआती रिओस्टेट का प्रतिरोध सुचारू रूप से शून्य हो जाता है।
एक प्रेरण मोटर के संचालन का सिद्धांत
हम अंजीर में दिखाए गए मॉडल में एक प्रेरण मोटर के संचालन के सिद्धांत पर विचार करेंगे। 16.9।
हम स्टेटर के घूर्णन चुंबकीय क्षेत्र को एक समकालिक घुमाव आवृत्ति यू के साथ घूमते हुए एक स्थायी चुंबक के रूप में दर्शाते हैं। बंद रोटर घुमावदार के कंडक्टरों में धाराएं प्रेरित होती हैं। चुंबक के ध्रुव दक्षिणावर्त चलते हैं। ऑब्जर्वर के लिए जो एक घूमने वाले चुंबक पर रखा जाता है, ऐसा लगता है कि चुंबक स्थिर है, और रोटर घुमावदार के कंडक्टर वामावर्त घूम रहे हैं। दाहिने हाथ के शासन द्वारा निर्धारित रोटर धाराओं की दिशाओं को अंजीर में दिखाया गया है। 16.9।
अंजीर। 16.9। प्रेरण मोटर मॉडल
बाएं हाथ के नियम का उपयोग करते हुए, हम रोटर पर अभिनय करने वाले विद्युत चुम्बकीय बलों की दिशा पाते हैं और इसे घुमाने का कारण बनाते हैं। मोटर रोटर स्टेटर क्षेत्र के रोटेशन की दिशा में n 1 की गति से घूमेगा। रोटर एसिंक्रोनस रूप से घूमता है, अर्थात, इसकी रोटेशन आवृत्ति एन 2 स्टेटर फ़ील्ड डब्ल्यू के रोटेशन की आवृत्ति से कम है। स्टेटर और रोटर फ़ील्ड की गति के बीच के सापेक्ष अंतर को स्लिप कहा जाता है:
पर्ची शून्य के बराबर नहीं हो सकती है, क्योंकि एक ही क्षेत्र में और रोटर गति को रोटर में शामिल करने की गति को रोक देगा और इसलिए, कोई विद्युत चुम्बकीय टोक़ नहीं होगा।
रोटेटिंग इलेक्ट्रोमैग्नेटिक मोमेंट को काउंटरिंग ब्रेकिंग मोमेंट द्वारा संतुलित किया जाता है। मोटर शाफ्ट पर लोड बढ़ने के साथ ब्रेकिंग मोमेंट टर्निंग मोमेंट से बड़ा हो जाता है, और स्लिप बढ़ जाती है। इसके परिणामस्वरूप, रोटर घुमावदार वृद्धि में प्रेरित ईएमएफ और धाराएं। टॉर्क बढ़ता है और ब्रेकिंग टॉर्क के बराबर हो जाता है। बढ़ती हुई पर्ची के साथ टोक़ एक निश्चित अधिकतम मूल्य तक बढ़ सकता है, जिसके बाद ब्रेकिंग टॉर्क में और वृद्धि के साथ, टोक़ तेजी से घटता है, और इंजन बंद हो जाता है।
यदि एक ब्रेक लगी मोटर की पर्ची एक के बराबर है, तो वे कहते हैं कि इंजन शॉर्ट सर्किट मोड में चल रहा है। अनलोड किए गए प्रेरण मोटर n 2 की रोटेशन आवृत्ति तुल्यकालिक आवृत्ति 1 के लगभग बराबर है।
यदि एक अनलोड इंजन S \u003d 0 की पर्ची है, तो वे कहते हैं कि इंजन बेकार है।
मोटर मोड में चलने वाली एक अतुल्यकालिक मशीन की पर्ची शून्य से एक तक भिन्न होती है। एक एसिंक्रोनस मशीन जनरेटर मोड में काम कर सकती है। ऐसा करने के लिए, इसके रोटर को स्टेटर चुंबकीय क्षेत्र के घूर्णन की दिशा में एक आवृत्ति n 2\u003e n 1 के साथ तीसरे पक्ष के इंजन द्वारा घुमाया जाना चाहिए। एस पर्ची अतुल्यकालिक जनरेटर< 0.
एक एसिंक्रोनस मशीन एक इलेक्ट्रिक मशीन ब्रेक के मोड में काम कर सकती है। ऐसा करने के लिए, स्टेटर के चुंबकीय क्षेत्र के रोटेशन की दिशा के विपरीत दिशा में इसके रोटर को घुमाना आवश्यक है। इस मोड में, S\u003e 1।
एसिंक्रोनस मशीनें आमतौर पर मोटर मोड में उपयोग की जाती हैं। इंडक्शन मोटर उद्योग में सबसे आम प्रकार की मोटर है। एक प्रेरण मोटर में क्षेत्र के रोटेशन की आवृत्ति सख्ती नेटवर्क एफ 1 की आवृत्ति और स्टेटर डंडे के जोड़े की संख्या से संबंधित है।
जब आवृत्ति f 1 \u003d 50 हर्ट्ज होती है, तो निम्नलिखित है गति सीमा (पी - एन 1, आरपीएम):
सूत्र (16.7) से हम प्राप्त करते हैं
रोटर के सापेक्ष स्टेटर फील्ड वेग को स्लिप वेलोसिटी कहा जाता है
![]()
रोटर घुमावदार में वर्तमान और ईएमएफ की आवृत्ति
एक रोटर के साथ एक अतुल्यकालिक मशीन एक ट्रांसफार्मर की तरह काम करती है। मुख्य चुंबकीय प्रवाह EMF E 1 और E 2K के स्टेटर और स्थिर रोटर वाइंडिंग में प्रेरित करता है:
जहां f m स्टेटर और रोटर वाइंडिंग के लिए मुख्य चुंबकीय प्रवाह का अधिकतम मूल्य है; डब्ल्यू 1 और डब्ल्यू 2 - स्टेटर और रोटर वाइंडिंग्स के घुमावों की संख्या; - नेटवर्क में वोल्टेज की आवृत्ति; K 01 और K 02 - स्टेटर और रोटर वाइंडिंग्स के घुमावदार गुणांक।
स्टेटर और रोटर के बीच हवा के अंतराल में चुंबकीय प्रेरण का अधिक अनुकूल वितरण प्राप्त करने के लिए, स्टेटर और रोटर वाइंडिंग को एक ही ध्रुव के भीतर केंद्रित नहीं किया जाता है, लेकिन स्टेटर और रोटर के परिधि के आसपास वितरित किया जाता है। वितरित वाइंडिंग की ईएमएफ एक केंद्रित वाइंडिंग की ईएमएफ से कम होती है। इस तथ्य को उन सूत्रों में पेश करके ध्यान में रखा जाता है जो घुमावदार, घुमावदार गुणांक के इलेक्ट्रोमोटिव बलों के परिमाण को निर्धारित करते हैं। घुमावदार गुणांक के परिमाण एकता से थोड़ा कम है। घूर्णन रोटर की घुमावदार में ईएमएफ
रनिंग मशीन का रोटर करंट
जहाँ R 2 रोटर वाइंडिंग का सक्रिय प्रतिरोध है; एक्स 2 - रोटर वाइंडिंग का आगमनात्मक प्रतिरोध,
जहाँ X 2K लॉक रोटर का इंडक्शन है। तो
एकल-चरण मोटर में स्टेटर पर स्थित एक घुमावदार होता है। बारी-बारी से चालू होने वाला एकल-चरण घुमावदार एक स्पंदित चुंबकीय क्षेत्र पैदा करेगा। हम इस क्षेत्र में एक शॉर्ट-सर्कुलेटिंग घुमावदार के साथ एक रोटर लगाते हैं। रोटर घूमेगा नहीं। यदि आप किसी भी दिशा में बाहरी यांत्रिक बल के साथ रोटर को स्पिन करते हैं, तो इंजन सख्ती से काम करेगा। इसे इस प्रकार समझाया जा सकता है।
स्पंदनशील चुंबकीय क्षेत्र को दो चुंबकीय क्षेत्रों द्वारा एक समकालिक आवृत्ति n1 के साथ विपरीत दिशाओं में घुमाया जा सकता है और स्पंदनशील क्षेत्र के चुंबकीय प्रवाह के आधे आयाम के बराबर चुंबकीय प्रवाह आयाम हैं। चुंबकीय क्षेत्रों में से एक को आगे-घूर्णन कहा जाता है, दूसरे को रिवर्स-रोटेटिंग कहा जाता है। प्रत्येक चुंबकीय क्षेत्र रोटर वाइंडिंग में एड़ी धाराओं को प्रेरित करता है। चुंबकीय क्षेत्रों के साथ एड़ी धाराओं की बातचीत के दौरान, टॉर्क्स उत्पन्न होते हैं जो एक दूसरे के विपरीत निर्देशित होते हैं। अंजीर में। 16.10 में प्रत्यक्ष फ़ील्ड M पर क्षण की निर्भरता को दर्शाया गया है, रिवर्स फ़ील्ड M पर पल "और परिणामी क्षण M को स्लिप फ़ंक्शन M \u003d M" - M "में दर्शाया गया है।
अंजीर। 16.10। फ़ॉरवर्ड फ़ील्ड की निर्भरता, रिवर्स फ़ील्ड और परिणामस्वरूप स्लिप पर पल
स्लाइडिंग कुल्हाड़ियों एक दूसरे के लिए काउंटर निर्देशित हैं। शुरुआती मोड में, रोटर उन टोरों से प्रभावित होता है जो परिमाण में समान होते हैं और दिशा में विपरीत होते हैं। हम रोटर को स्पिनिंग चुंबकीय क्षेत्र की दिशा में एक बाहरी बल के साथ स्पिन करते हैं। एक अतिरिक्त (परिणामस्वरूप) टोक़ प्रकट होता है, रोटर को सिंक्रोनस के करीब गति को तेज करता है। इस मामले में, आगे-घूमने वाले चुंबकीय क्षेत्र के सापेक्ष इंजन की पर्ची
![]()
रिवर्स मैग्नेटिक फील्ड के सापेक्ष मोटर स्लिप
परिणामी विशेषता को ध्यान में रखते हुए, हम निम्नलिखित निष्कर्ष निकाल सकते हैं।
निष्कर्ष 1। एकल-चरण मोटर में शुरुआती टोक़ नहीं होता है। यह उस दिशा में घूमेगा जिसमें यह एक बाहरी बल द्वारा अपरिवर्तित है।
निष्कर्ष २। रिवर्स-रोटेटिंग फ़ील्ड के ब्रेकिंग प्रभाव के कारण, एकल-चरण मोटर की विशेषताएं तीन-चरण से भी बदतर हैं।
एक शुरुआती टोक़ बनाने के लिए, एकल-चरण मोटर्स 90 डिग्री से मुख्य कामकाजी घुमावदार से एक स्थानिक घुमावदार घुमाव से लैस हैं। प्रारंभिक घुमावदार चरण-शिफ्टिंग तत्वों के माध्यम से नेटवर्क से जुड़ा हुआ है: एक संधारित्र या सक्रिय प्रतिरोध।
अंजीर। 16.11 मोटर वाइंडिंग को शामिल करने का एक आरेख दिखाता है, जहां पी कार्यशील वाइंडिंग है, पी शुरुआती वाइंडिंग है। चरण-स्थानांतरण तत्व सी की क्षमता का चयन किया जाता है ताकि काम करने और शुरू करने वाले घुमावों में धारा 90 ° से भिन्न हो। एक तीन-चरण अतुल्यकालिक मोटर एकल-चरण नेटवर्क पर काम कर सकती है यदि आप निम्नलिखित योजनाओं (चित्र 16.12) के अनुसार इसकी विंडिंग को जोड़ते हैं।
अंजीर में दिखाए गए सर्किट में। 16.12, और स्टेटर वाइंडिंग्स एक तारे से जुड़े हैं, और चित्र में आरेख में। 16 दिसंबर, बी - एक त्रिकोण। कैपेसिटेंस C ~ 60 μF प्रति 1 किलोवाट शक्ति का मान।
अंजीर। 16.11। एकल-चरण मोटर घुमावदार सर्किट
अंजीर। 16.12। एक चरण में तीन-चरण मोटर की विंडिंग को चालू करने की योजनाएं: पहला विकल्प; बी - दूसरा विकल्प
एक प्रेरण मोटर के संचालन का सिद्धांत चुंबकीय क्षेत्रों के घूमने और इलेक्ट्रिकल इंजीनियरिंग के बुनियादी नियमों के उपयोग पर आधारित है।
जब मोटर को तीन-चरण के वर्तमान नेटवर्क में चालू किया जाता है, तो एक स्थिर चुंबकीय क्षेत्र, लेकिन अंतरिक्ष में घूमते हुए, स्टेटर में बनता है, जिसके बल की रेखाएं रोटर वाइंडिंग के मोड़ को पार करती हैं। इसके अलावा, विद्युत चुम्बकीय प्रेरण के कानून के अनुसार, रोटर वाइंडिंग में एक ईएमएफ प्रेरित होता है, जिसकी परिमाण फ़ील्ड लाइनों के चौराहे की आवृत्ति के लिए आनुपातिक होती है। महत्वपूर्ण धाराएं EMF द्वारा प्रेरित एक गिलहरी पिंजरे रोटर में होती हैं।
एम्पीयर के नियम के अनुसार, मैकेनिकल कंडक्टर एक चुंबकीय क्षेत्र में वर्तमान-ले जाने वाले कंडक्टर पर कार्य करते हैं, जो कि लेनज़ सिद्धांत के अनुसार, प्रेरित धारा के कारण को समाप्त करने के लिए करते हैं, अर्थात्। एक घूमने वाले क्षेत्र के बल की रेखाओं द्वारा रोटर घुमावदार की छड़ का चौराहा। इस प्रकार, उत्पन्न होने वाली यांत्रिक ताकतें रोटर को क्षेत्र के रोटेशन की दिशा में घुमाएगी, बल की चुंबकीय लाइनों के साथ रोटर घुमावदार की छड़ के चौराहे की गति को कम करेगी।
वास्तविक परिस्थितियों में, रोटर क्षेत्र की रोटेशन आवृत्ति तक नहीं पहुंच सकता है, तब से इसकी विंडिंग की छड़ चुंबकीय क्षेत्र लाइनों के सापेक्ष स्थिर होगी और रोटर वाइंडिंग में प्रेरित धाराएं गायब हो जाएंगी। इसलिए, रोटर क्षेत्र के रोटेशन की आवृत्ति से कम आवृत्ति के साथ घूमता है, अर्थात। क्षेत्र या के साथ सिंक में नहीं अतुल्यकालिक रूप से.
एक प्रेरण मोटर के रोटर के रोटेशन की दिशा बदलने के लिए, चुंबकीय क्षेत्र के रोटेशन की दिशा को बदलना आवश्यक है, अर्थात। मोटर की आपूर्ति करने वाले तीन चरण तारों में से किसी दो को स्विच करके स्टेटर वाइंडिंग के चरण अनुक्रम को बदल दें।
चुंबकीय क्षेत्र रोटेशन की आवृत्ति n 1 (तुल्यकालिक गति) आवृत्ति पर बहुत अधिक निर्भर करता है च 1 इनपुट वोल्टेज और पोल जोड़े की संख्या पीइंजन: n 1 = 60च 1 /पी.
यह निम्नानुसार है कि रूस में आपूर्ति की गई वोल्टेज की औद्योगिक आवृत्ति के साथ ( च 1 \u003d 50 हर्ट्ज) चुंबकीय क्षेत्र की क्रांतियों की सबसे बड़ी संख्या 3000 आरपीएम के बराबर है पी\u003d 1. जैसे ही ध्रुव युग्मों की संख्या बढ़ती है, चुंबकीय क्षेत्र के घूमने की आवृत्ति कम हो जाती है, और परिणामस्वरूप, रोटर के रोटेशन की आवृत्ति भी कम हो जाती है। पर पी= 2,n\u003d 1500 आरपीएम, आदि।
यदि रोटर के रोटेशन को बाधित करने वाली ताकतें छोटी हैं, तो रोटर क्षेत्र के रोटेशन की आवृत्ति के करीब आवृत्ति के साथ घूमता है। मोटर शाफ्ट पर बढ़ते भार के साथ, रोटर की गति कम हो जाती है, इसके घुमाव के घुमावों में धाराएं बढ़ जाती हैं, जिससे मोटर टोक़ में वृद्धि होती है। एक निश्चित रोटर गति पर, के बीच एक संतुलन स्थापित किया जाता है ब्रेकऔर धार।
द्वारा निरूपित करें n 2 प्रेरण मोटर के रोटर की घूर्णी गति, और के माध्यम से n चुंबकीय क्षेत्र के रोटेशन की 1 आवृत्ति। पिछले अनुभाग में, यह दिखाया गया था कि n 2 <n 1 .
रोटर के सापेक्ष चुंबकीय क्षेत्र के रोटेशन की आवृत्ति, अर्थात्। अंतर n 1 –n 2, कहा जाता है चूक। आमतौर पर स्लिप को फील्ड रोटेशन फ्रिक्वेंसी के अंशों में व्यक्त किया जाता है और प्रतीक द्वारा इंगित किया जाता है रों:
रों = (n 1 – n 2)/ n 1 .
स्लाइडिंग मोटर शाफ्ट पर लोड पर निर्भर करता है। रेटेड लोड पर, इसका मूल्य कम बिजली मशीनों के लिए लगभग 0.05 और शक्तिशाली इंजनों के लिए लगभग 0.02 है।
ऊपर दी गई समानता से, हम आसानी से संबंध पा सकते हैं: n 2 =n 1 (1 – रों)। और एक साधारण रूपांतरण के बाद हमें मोटर आवृत्ति के लिए एक अभिव्यक्ति मिलती है, जो आगे के तर्क के लिए सुविधाजनक है: n 2 = 60च 1 (1 ‑ रों)/पी.
चूंकि सामान्य इंजन के संचालन के दौरान स्लिप छोटी होती है, इसलिए इंजन की गति फ़ील्ड रोटेशन की गति से बहुत कम होती है।
व्यवहार में, पर्ची को अक्सर प्रतिशत के रूप में व्यक्त किया जाता है:
ख = 100 (n 1 – n 2)/ n 1 .
अधिकांश प्रेरण मोटर्स के लिए, पर्ची 2 से 6% के बीच भिन्न होती है।
स्लाइडिंग एक इंजन की सबसे महत्वपूर्ण विशेषताओं में से एक है; इसके माध्यम से EMF और रोटर करंट, टॉर्क, रोटर स्पीड को व्यक्त किया जाता है।
जब अभी भी ( n 2 \u003d 0) रोटर रों\u003d 1. इंजन में शुरुआत के समय यह स्लिप होती है।
जैसा कि पहले ही उल्लेख किया गया है, फिसलने मोटर शाफ्ट पर लोड के क्षण पर निर्भर करता है; इसलिए, रोटर की गति शाफ्ट पर ब्रेकिंग टॉर्क पर भी निर्भर करती है। रोटर गति का नाममात्र मूल्य n 2, नाम, भार के परिकलित मूल्य के अनुरूप एम एन, आवृत्तियों च 1, नामित और साधन वोल्टेज यू 1, नामांकित, इंडक्शन मोटर के आवरण पर घुड़सवार नेमप्लेट पर इंगित किया गया है।

/ 30.07.2010 / श्टोकमैन गैस संघनन क्षेत्र अंजीर। 1. तेल और गैस का सामान्य लेआउट ...

क्रोपोटकिन्सकी अयस्क क्लस्टर, मारकान-तुंगुस्का सिनक्लेनल के उत्तरी विंग तक ही सीमित है, जो इसके द्वारा जटिल है ...
पृष्ठ 1 खनिज संसाधन तीव्र संकट के बावजूद जो विकसित देशों में समय-समय पर प्रकट हुए हैं और ...

रूस में सबसे बड़ी तेल कंपनियां LUKoil, Rosneft, TNK-BP Holding, Gazprom Neft, Surgutneftegaz, हैं ...

यह क्या है खनिज संसाधन पृथ्वी के आंतों में स्थित महाद्वीपीय भाग के रूप में स्थित हैं ...


सर्गेई, यह बहुत अच्छी तरह से हो सकता है कि आपने गलत तरीके से विंडिंग को चरणबद्ध किया। क्या आप वाकई इससे जुड़े हुए हैं ...

नाम: Prirazlomnoye तेल क्षेत्र स्थान: Pechora सागर में, तट से 60 किमी। लाइसेंस: ...
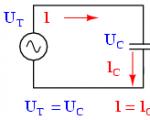
एक एसी सर्किट में एक संधारित्र एक एसी सर्किट में एक संधारित्र एक रोकनेवाला से अलग व्यवहार करता है। यदि ...

एक दोस्त को भेजें प्राकृतिक गैस और तेल सबसे मूल्यवान घटक हैं ...

यदि आपके पास अपेक्षाकृत छोटा क्षेत्र है, तो आप सब कुछ और बहुत सारे, ऊर्ध्वाधर बेड लगाना चाहते हैं - यही वह है ...

फोटो में, एक्टिनिडिया को बड़े अंगूरों के लिए गलत किया जा सकता है, हालांकि वास्तव में, यह पेड़ कीवी का एक रिश्तेदार है, क्या ...

बेड में पहले जन्म के लिए लगभग कोई परवाह नहीं है। और वे लंबे समय तक जमीन पर कब्जा नहीं करेंगे - जल्द से जल्द सब्जियां हो सकती हैं ...

गर्मियों के कॉटेज में बढ़ते करंट, माली को कई समस्याओं का सामना करना पड़ता है, और उनमें से एक गिर रहा है ...

सामग्री अमूर अंगूर हाल ही में अपनी उपचार शक्ति के बारे में किंवदंतियों के साथ उग आया है और अधिक से अधिक फैल रहा है ...।

उच्च पैदावार और गुणवत्ता वाले फल प्राप्त करने के लिए खुबानी, से कुछ ध्यान देने की आवश्यकता है ...