इंजन की गति को मैन्युअल रूप से कैसे निर्धारित किया जाए
इलेक्ट्रिक मोटर - स्टेटर घुमावदार प्रक्रिया में समय-समय पर, आपको एसिंक्रोनस के क्रांतियों की संख्या खोजने की आवश्यकता है ...
इलेक्ट्रिक मोटर - स्टेटर वाइंडिंग
काम की प्रक्रिया में समय-समय पर, आपको अतुल्यकालिक इलेक्ट्रिक मोटर के क्रांतियों की संख्या खोजने की आवश्यकता होती है, जिस पर कोई टैग नहीं है। और प्रत्येक इलेक्ट्रिशियन इस कार्य से सामना नहीं कर सकता है। लेकिन मेरा विश्वदृष्टि यह है कि हर इलेक्ट्रीशियन को यह समझना चाहिए। अपने स्वयं के कार्यस्थल पर, जैसा कि वे कहते हैं - ड्यूटी पर, आप अपने स्वयं के इंजन के सभी गुणों को समझते हैं। और हम एक नए कार्यस्थल पर भागे, और किसी भी इंजन पर कोई टैग नहीं है। इलेक्ट्रिक मोटर के क्रांतियों की संख्या का पता लगाएं, यहां तक कि बहुत सरल और सरल है। घुमावदार द्वारा निर्धारित। ऐसा करने के लिए, मोटर कवर को हटा दें। बैक कवर के साथ करना बेहतर है, क्योंकि पुली या कपलिंग आधे को हटाने की आवश्यकता नहीं है। कवर को हटाने के लिए पर्याप्त है

शीतलन और प्ररित करनेवाला और मोटर कवर उपलब्ध है। कवर को हटाने के बाद, घुमावदार को काफी अच्छी तरह से देखा जा सकता है। एक अनुभाग ढूंढें और देखें कि कितना है

इंजन - 3000 आरपीएम
स्थानों पर यह वृत्त (स्टेटर) की परिधि के आसपास होता है। अब याद रखें, यदि कॉइल आधा सर्कल (180 डिग्री) पर कब्जा कर लेता है - यह 3000 रेव / मिनट के लिए इंजन है।

इंजन - 1500 आरपीएम
यदि एक वृत्त (120 डिग्री) में तीन खंड हैं, तो यह 1500 रेव / मिनट का इंजन है। ठीक है, अगर स्टेटर चार खंड (90 डिग्री) रखता है - यह इंजन 1000 रेव / मिनट के लिए है। यह एक "अज्ञात" इलेक्ट्रिक मोटर के क्रांतियों की संख्या को खोजने के लिए पूरी तरह से आसान है। प्रस्तुत चित्र पर यह पूरी तरह से देखा जा सकता है।

इंजन - 1000 आरपीएम
यह निर्धारित करने की एक विधि है जब घुमावदार तारों के कुंडल वर्गों में घाव होते हैं। और घुमावदार "ढीले" हैं, इस तरह से अब नहीं पाया जा सकता है। घुमावदार की ऐसी विधि कभी-कभी होती है।
घुमावों की संख्या निर्धारित करने के लिए अभी भी एक तरीका है। इलेक्ट्रिक मोटर के रोटर में, एक अवशिष्ट चुंबकीय क्षेत्र होता है जो स्टेटर वाइंडिंग में एक छोटे ईएमएफ को प्रेरित कर सकता है यदि हम रोटर को चालू करते हैं। यह EMF एक मिलीमीटर के साथ "पकड़ा" जा सकता है। हमारी समस्या में निम्नलिखित शामिल हैं: एक चरण के घुमावदार को खोजना आवश्यक है, भले ही विंडिंग्स कैसे जुड़े हों, एक त्रिकोण या एक स्टार के साथ। और हम एक मिलीमीटर को घुमावदार के छोर से जोड़ते हैं, मोटर शाफ्ट को घुमाते हैं, रोटर के एक मोड़ में मिलीमीटर कितनी बार विचलन करते हैं और इस तालिका को देखने के लिए देखें कि आप किस इंजन को परिभाषित करते हैं।
(2 पी) 2,000,000 आर / मिनट
(2 पी) 4 1500 आर / मिनट
(2 पी) 6 1000 आर / मिनट
(2 पी) 8 750 आर / मिनट
ये सामान्य हैं और मुझे लगता है कि क्रांतियों की संख्या निर्धारित करने के दो तरीके हैं, जिन पर कोई टैग (प्लेट) नहीं है।
यूएसएसआर में, डिवाइस को पीएम 10-पी निर्मित किया गया था, शायद कोई बच गया हो। जिसने इस तरह के मीटर के बारे में नहीं देखा है और नहीं जानता है, मैं सुझाव देता हूं कि वह अपनी खुद की एक तस्वीर देख सकता है। किट में दो नोजल होते हैं - शाफ्ट अक्ष के साथ क्रांतियों को मापने के लिए और 2 शाफ्ट के परिधि के साथ मापने के लिए। 
आप "डिजिटल लेजर टैकोमीटर" का उपयोग करके क्रांतियों की संख्या को माप सकते हैं

"डिजिटल लेजर टैकोमीटर"
तकनीकी गुण:
स्पेक्ट्रम: 2.5 आरपीएम ~ 99999 रेव / मी
रिज़ॉल्यूशन / चरण: 0.1 आरपीएम स्पेक्ट्रम के लिए 2.5 ~ 999.9 आरपीएम, 1 आरपीएम 1000 आरपीएम या अधिक
सटीकता: +/- 0.05%
काम दूरी: 50mm ~ 500mm
सबसे छोटा और सबसे बड़ा मूल्य भी इंगित करता है।
उन लोगों के लिए जिन्हें वास्तव में ज़रूरत है - बस एक सुपर चीज़!
एल। रायज़ेनकोव
किसी भी मशीन को संचालित करते समय इलेक्ट्रिक मोटर के बिना नहीं कर सकते। कई लोग बिना किसी दस्तावेज के अपने हाथों से एक इलेक्ट्रिक मोटर खरीदते हैं। ऐसी स्थिति में, इलेक्ट्रिक मोटर की गति का निर्धारण करने में समस्या है। इस समस्या को हल करने के लिए, आप कई विधियों का उपयोग कर सकते हैं।
इलेक्ट्रिक मोटर की गति निर्धारित करने का सबसे आसान तरीका टैकोमीटर का उपयोग करना है। लेकिन इस उपकरण में एक व्यक्ति की उपस्थिति जो इलेक्ट्रिक मोटर्स में विशेषज्ञ नहीं है, एक दुर्लभ वस्तु है। इसलिए, प्रति आंख क्रांतियों को निर्धारित करने के तरीके हैं। मोटर की गति निर्धारित करने के लिए, मोटर के कवर में से एक को खोलें और कॉइल वाइंडिंग का पता लगाएं। मोटर में कई कॉइल हो सकते हैं। देखने और आसानी से पहुंचने वाले कॉइल का चयन करें।




इलेक्ट्रिक मोटर की सभी मुख्य विशेषताओं को उसके शरीर पर स्थित धातु टैग पर इंगित किया जाना चाहिए। लेकिन व्यवहार में, टैग या तो गायब है या ऑपरेशन के दौरान जानकारी मिटा दी गई है।
कभी-कभी, मेरे अभ्यास में, मुझे एसिंक्रोनस इलेक्ट्रिक मोटर्स से संबंधित एक समस्या से निपटना पड़ा - जैसे क्रांतियों की संख्या निर्धारित करें रोटार बिजली की मोटर, अगर इलेक्ट्रिक मोटर के लिए कोई टैग और तकनीकी दस्तावेज नहीं है?प्रश्न, वास्तव में, बस हल किया जाता है - गति निर्धारित की जा सकती है घुमावदार कॉइल स्टेटर एसिंक्रोनस मोटर।
अतुल्यकालिक इलेक्ट्रिक मोटर्स को रोटर के क्रांतियों की संख्या से विभाजित किया जाता है:
1000 रेव / मिनट, 1500 रेव / मिनट और 3000 रेव / मिनट। यह याद रखना चाहिए कि यदि हम एक अतुल्यकालिक इलेक्ट्रिक मोटर "एक-हज़ारवां" कहते हैं, तो इसमें 1000 पीपीएम नहीं है, क्योंकि यह अतुल्यकालिक है (रोटर चुंबकीय क्षेत्र से पीछे है)। इसमें 940 आरपीएम, 980 आरपीएम या ऐसा हो सकता है, लेकिन 1000 आरपीएम नहीं। यही बात "1500-हजार" (1440 - 1480 आरपीएम / मिनट) और "तीन-हजार" (2940 - 2980 आरपीएम / मिनट) पर लागू होती है।स्टेटर वाइंडिंग की रोटर गति का निर्धारण कैसे करें
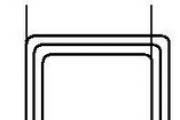
इलेक्ट्रिक मोटर के दो कवरों में से एक को खोलें और कॉइल घुमावदार, या बल्कि, एक कॉइल पर देखें। इसमें कई खंड (2, 3, 4) शामिल हो सकते हैं।
स्टेटर में हम कॉइल ढूंढते हैं, जिसे हम सबसे अच्छा देख सकते हैं। अब हम स्टेटर आयरन के सापेक्ष इसके आकार को देखते हैं। मैं यह नहीं बताऊंगा कि कॉइल कैसे परस्पर जुड़े हुए हैं, कॉइल में सेक्शन कैसे जुड़े हुए हैं, स्टेटर में कितने स्लॉट्स के माध्यम से उन्हें बिछाया जाता है, आदि। इसकी अब हमें जरूरत नहीं है। अब हमें यह निर्धारित करने की आवश्यकता है कि स्टेटर लोहे की अंगूठी में एक कॉइल व्याप्त है।

इस दूरी को (आंख से भी) निर्धारित करने के बाद, हम निश्चितता के साथ कह सकते हैं कि किसी दिए गए अतुल्यकालिक इलेक्ट्रिक मोटर में कितने क्रांतियां हैं।
1. अगर कुंडल आधी अंगूठी लेता है ग्रंथि स्टेटर फिर इलेक्ट्रिक मोटर पर 3000 आरपीएम .

2. यदि कुंडल अंगूठी का 1/3 भाग लेता है ग्रंथि फिर बिजली की मोटर पर 1500 आरपीएम .

3. यदि कुंडली लोहे की अंगूठी का 1/4 भाग लेती है फिर बिजली की मोटर पर 1000 आरपीएम .
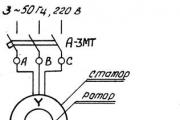
आमतौर पर, एक इलेक्ट्रिक मोटर में पासपोर्ट डेटा, एक वाइंडिंग कनेक्शन आरेख, वोल्टेज जिस पर मोटर चलती है, प्रति मिनट क्रांतियों की संख्या, दक्षता, आदि से जुड़ा हुआ है। लेकिन ऐसे मामले हैं कि टैबलेट या तो खो गया है, या अंततः अपठनीय हो गया है, या उसे चित्रित किया गया है।
यदि आपको इंजन के क्रांतियों की संख्या निर्धारित करने की आवश्यकता है, और इंजन पर कोई कारखाना पासपोर्ट नहीं है या, जैसा कि अक्सर होता है, पासपोर्ट को इस बिंदु पर छायांकित किया जाता है कि तकनीकी डेटा को देखने की कोई संभावना नहीं है और हाथ में टैकोमीटर नहीं है, आपको खुद को और लगभग निर्धारित करना होगा।
तीन-चरण मोटर के संचालन का सिद्धांत इस तथ्य पर आधारित है कि एक विद्युत प्रवाह एक घूर्णन विद्युत चुम्बकीय क्षेत्र का उत्पादन करता है, जो रोटर के चारों ओर गुजरता है, रोटर कंडक्टरों में धाराओं को प्रेरित करता है, जो स्टेटर के विद्युत चुम्बकीय क्षेत्र के साथ बातचीत करके इसे साथ ले जाता है। लेकिन घर्षण और जड़ता के सक्रिय बलों के लिए धन्यवाद, क्रांतियों के एक छोटे से हिस्से से रोटर में देरी होती है, इसे रोटर की पर्ची कहा जाता है।
रोटेशन की तुल्यकालिक गति क्षेत्र के रोटेशन की गति के बराबर गति है, लेकिन अगर रोटर के रोटेशन की गति फ़ील्ड के रोटेशन की गति के बराबर है, तो रोटर के सापेक्ष फ़ील्ड का रोटेशन गायब हो जाएगा, जिसके परिणामस्वरूप प्रेरित इलेक्ट्रोमोटिव बल की अनुपस्थिति होगी। और क्षेत्र के साथ रोटर की कोई बातचीत नहीं होगी।
यह मत भूलो कि फिलहाल कई प्रकार के इंजन हैं, मुख्य रूप से अतुल्यकालिक इंजन का उपयोग किया जाता है, क्योंकि वे विद्युत ऊर्जा की गुणवत्ता के साथ-साथ संचालित करने और आसानी से निर्माण और मरम्मत के लिए आसान नहीं हैं।
मोटर शाफ्ट की घूर्णी गति निर्धारित करने के लिए, यदि कोई डेटा नहीं है, और पासपोर्ट टैग क्षतिग्रस्त है या नहीं, तो आपको स्टेटर पर एक इंजन कवर को खोलने और डंडे की संख्या गिनने की आवश्यकता है। इस मामले में, पीछे के कवर को हटाने के लिए बेहतर है, अतिरिक्त उपकरण को हटाने के लिए नहीं, शाफ्ट की तरफ से, युग्मन आधा या गियरबॉक्स की एक श्रृंखला से, और यह आवरण और इंजन शीतलन प्ररित करनेवाला और आवरण को हटाने के लिए पर्याप्त होगा। ऐसा करने के लिए, सभी स्लॉट की संख्या की गणना करें और एकल मोटर वाइंडिंग द्वारा कब्जा किए गए स्लॉट की संख्या से विभाजित करें। परिणामी संख्या और एक विद्युत मोटर के ध्रुवों की संख्या के बराबर। फिर डंडे की संख्या से हम गति निर्धारित करते हैं: 2 - 3000 आरपीएम, 4 - 1500 आरपीएम, 6 - 1000 आरपीएम, 8 - 700 आरपीएम। लेकिन यह मत भूलो कि क्रांतियों की संख्या लगभग अनुमानित होगी, क्योंकि क्रांतियों की संख्या हमेशा विद्युत मोटर की विंडिंग द्वारा बनाए गए चुंबकीय क्षेत्र के सापेक्ष रोटर के स्लिप (अंतराल) के कारण घोषित से कम होती है।
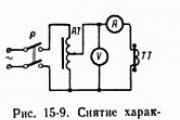
आप इंजन को डिसाइड किए बिना इंजन के क्रांतियों की संख्या भी निर्धारित कर सकते हैं, लेकिन एक एमीटर की मदद से। अवशिष्ट ईएमएफ (इलेक्ट्रोडायनामिक बल) इंजन रोटर में प्रेरित होता है और इससे निर्धारित किया जा सकता है। हम एक मिलीमीटर लेते हैं, और एक विंडिंग के 2 छोर पाते हैं, एक मिलीमीटर कनेक्ट करते हैं और शाफ्ट को मोड़ना शुरू करते हैं। मोटर शाफ्ट की एक पूर्ण क्रांति के लिए तीर कितनी बार डिफ्लेक्ट करता है, इंजन में इतने सारे पोल। और फिर हम पहले दिए गए डेटा को लेते हैं, और इस मामले में आवेदन करते हैं।
मोटर शाफ्ट के रोटेशन की गति का निर्धारण करने के लिए एक और तरीका है, अगर कोई तकनीकी डेटा नहीं है या कोई नुकसान हुआ है। इसके लिए हम स्ट्रोबोस्कोपिक विधि का उपयोग करते हैं। विधि का सार इस वस्तु की अल्पकालिक रोशनी के दौरान किसी वस्तु के भ्रम की गति पर आधारित है। इस तरह, आप किसी भी इंजन के लिए प्रति मिनट क्रांतियों की संख्या निर्धारित कर सकते हैं।
निर्धारित करने के लिए, आपको अपने हाथों पर गति अंशांकन डिस्क, कैंची, और एक फ्लोरोसेंट लैंप और विद्युत नेटवर्क तक पहुंच के चित्र बनाने होंगे। हम एक मानक प्रिंटर पर कैलिब्रेशन डिस्क प्रिंट करते हैं, उन्हें मोटर रोटर पर गोंद करें (मूल रूप से आपको पहले और चौथे डिस्क की आवश्यकता होगी, क्योंकि ये इलेक्ट्रिक मोटर्स के सबसे सामान्य संस्करण हैं)। शाफ्ट के सामने एक फ्लोरोसेंट लैंप स्थापित करें और इसे नेटवर्क से कनेक्ट करें, इंजन चालू करें। यदि इंजन के संचालन के दौरान हम एक धीमी गति से घूमते हैं या पैटर्न की गतिहीनता देखते हैं, तो कैलिब्रेशन डिस्क को सही ढंग से चुना जाता है और डिस्क पर क्रांतियों की संख्या को सही ढंग से इंगित किया जाता है। पैटर्न का धीमा रोटेशन इंगित करता है कि थोड़ी सी फिसलन है, और सामान्य तौर पर पैटर्न विपरीत दिशा में आगे बढ़ेगा, क्योंकि क्रांतियों की संख्या विद्युत चुम्बकीय क्षेत्र के रोटेशन की आवृत्ति से कम होगी। यदि आंखों के सामने एक ग्रे धुंध या एक तस्वीर बहुत तेजी से चलती है, तो इंजन को रोकें और अंशांकन डिस्क को बदलें, और ऑपरेशन को दोहराएं जब तक कि ड्राइंग स्थिर या धीरे-धीरे घूर्णन न हो। यह समाधान सस्ता और सस्ता है। यदि आपके पास एक प्रिंटर और एक फ्लोरोसेंट लैंप है, तो आप किसी भी क्रांतियों को निर्धारित कर सकते हैं।
सोवियत उत्पादन की पुरानी और प्रयुक्त अतुल्यकालिक मशीनों को उच्चतम गुणवत्ता और टिकाऊ माना जाता है। हालांकि, जैसा कि कई इलेक्ट्रीशियन जानते हैं, उन पर नेमप्लेट पूरी तरह से अपठनीय हो सकते हैं, और इंजन में ही स्टेटर फिर से लगाया जा सकता है। आप घुमावदार में डंडे की संख्या से विद्युत मोटर के रोटेशन की नाममात्र आवृत्ति निर्धारित कर सकते हैं, लेकिन अगर हम चरण-रोटर के साथ मशीनों के बारे में बात कर रहे हैं या मामले को अलग करने की कोई इच्छा नहीं है, तो आप सिद्ध तरीकों में से एक का सहारा ले सकते हैं।
इलेक्ट्रोकेमिकल प्रयोगशालाओं और उत्पादन में, विशेष उपकरणों का उपयोग किया जाता है - टैकोमीटर। यदि आप ऐसे उपकरण तक पहुंच प्राप्त करते हैं, तो आप कुछ सेकंड में प्रेरण मोटर की घूर्णी गति को माप सकते हैं। टैकोमीटर में एक डायल या डिजिटल डायल और एक मापने वाली छड़ होती है, जिसके अंत में एक गेंद के साथ एक छेद होता है। यदि आप दांतेदार मोम के साथ शाफ्ट पर केंद्र छेद को चिकना करते हैं और इसे मापने वाली छड़ी को मजबूती से संलग्न करते हैं, तो प्रति मिनट क्रांतियों की सटीक संख्या डायल पर प्रदर्शित की जाएगी।
जब इंजन चालू होता है, तो डिवाइस एक सफेद स्थान की घटना की आवृत्ति के अनुसार प्रति मिनट क्रांतियों की सटीक संख्या निर्धारित करेगा। इस पद्धति का उपयोग, एक नियम के रूप में, शक्तिशाली इलेक्ट्रिक मशीनों के नैदानिक परीक्षण और लागू लोड पर घूर्णी गति की निर्भरता में किया जाता है।
इलेक्ट्रिक मोटर - स्टेटर घुमावदार प्रक्रिया में समय-समय पर, आपको एसिंक्रोनस के क्रांतियों की संख्या खोजने की आवश्यकता है ...

सैमसंग इलेक्ट्रॉनिक्स: टीवी और वाशिंग मशीन 2008 में, सैमसंग इलेक्ट्रॉनिक्स ने बोरोव्स्की जिले में एक संयंत्र खोला ...
क) परीक्षण का दायरा एक नए स्विच के साथ, वर्तमान ट्रांसफार्मर और उनके सर्किट का निरीक्षण किया जाता है, प्रतिरोध की जाँच की जाती है ...
एसी विद्युत प्रवाह और चिकित्सा में इसका अनुप्रयोग। 1. प्रत्यावर्ती धारा, इसके प्रकार और मुख्य विशेषताएं…।
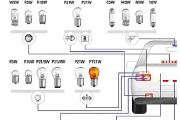
लैंप बेस को GOST 2023-88 के अनुसार वर्गीकृत किया गया है। कार लैंप के प्रकार A - ऑटोमोबाइल लैंप। AMN - दीपक ...
एक चरण रोटर के साथ एक अतुल्यकालिक मोटर का शोध कार्य का उद्देश्य: एक अतुल्यकालिक मोटर के डिजाइन से परिचित होना ...

अक्सर प्रकाश बल्ब चुनने पर, एक व्यक्ति को इसकी मुख्य विशेषताओं को याद नहीं होता है। इसके अलावा, कई खरीदार हैरान हैं ...

H G I O Urengoyskoye गैस क्षेत्र - एक सुपर-विशाल गैस क्षेत्र, तीसरा ...

इंजन की गति का विनियमन तकनीकी की आवश्यकताओं के अनुसार निर्धारित किया जाता है ...

प्रारंभिक अनुमानों के अनुसार, सुखी लॉग रूस में सोने का सबसे बड़ा अयस्क भंडार है। हालांकि, बड़ा ...

यह लेख बिजली मीटर और विशेषताओं के चयन के लिए सामान्य सिद्धांतों को प्रस्तुत करता है, ...

कॉन्टेक्ट लेंस जिसमें दृष्टि को ठीक करने का उद्देश्य है, को अकल्पनीय ऑप्टिकल माना जा सकता है ...
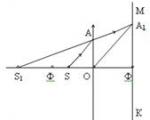
क) हम तीन मामलों में मुख्य ऑप्टिकल अक्ष पर स्थित एक चमकदार बिंदु की एक छवि का निर्माण करते हैं: 1) बिंदु एस ...

जनरेटर और उपभोक्ता के बीच तारों की संख्या को कम करने के लिए, चरण वाइंडिंग को आपस में जोड़ा जाना चाहिए ...

क्या आप नर्सरी में चमक जोड़ने या घर में अपने कार्यस्थल को ताज़ा करने का सपना देखते हैं? या हो सकता है कि आप पूर्व के प्रेमी हों ...
एक्सेल में, अत्यधिक ग्राफ और चार्ट बनाने के लिए उपकरण हैं, जिनके साथ आप कर सकते हैं ...