तीन चरण कनेक्शन आरेख
सभी को शुभ दिन। पिछले लेख में मैंने समीक्षा की, जिसमें विद्युत परिपथों के स्रोत के संबंध में ...
एक इलेक्ट्रिक मोटर का चयन करने के लिए शर्तें
निम्न परिस्थितियों के पूरा होने पर इलेक्ट्रिक मोटर्स के कैटलॉग प्रकारों में से एक का चुनाव सही माना जाता है:
a) यांत्रिक गुणों पर इलेक्ट्रिक मोटर वर्किंग मशीन (ड्राइव) का सबसे पूर्ण अनुपालन। इसका मतलब यह है कि इलेक्ट्रिक मोटर में एक ऐसी यांत्रिक विशेषता होनी चाहिए, जिस पर यह ड्राइव और गति और त्वरण के आवश्यक मूल्यों को सूचित कर सकता है, दोनों ऑपरेशन के दौरान और स्टार्ट-अप के दौरान;
ख) प्रक्रिया में मोटर शक्ति का अधिकतम उपयोग। संचालन के सबसे गंभीर तरीकों में इलेक्ट्रिक मोटर के सभी सक्रिय भागों का तापमान मानकों द्वारा निर्धारित हीटिंग तापमान के जितना संभव हो उतना करीब होना चाहिए, लेकिन इससे अधिक नहीं;
ग) डिजाइन के संदर्भ में ड्राइव और पर्यावरण की स्थिति के साथ इलेक्ट्रिक मोटर का अनुपालन;
घ) अपने आपूर्ति नेटवर्क के मापदंडों के साथ मोटर का अनुपालन।
इलेक्ट्रिक मोटर की पसंद के लिए निम्न प्रारंभिक डेटा आवश्यक है: 
a) तंत्र का नाम और प्रकार;
ख) तंत्र के ड्राइव शाफ्ट पर अधिकतम शक्ति, अगर ऑपरेशन का मोड निरंतर है और लोड स्थिर है, और अन्य मामलों में - समय के एक समारोह के रूप में शक्ति में परिवर्तन या प्रतिरोध के क्षण के ग्राफ;
ग) तंत्र के ड्राइव शाफ्ट के रोटेशन की गति;
डी) मोटर शाफ्ट के साथ तंत्र की अभिव्यक्ति की विधि (यदि गियर हैं, तो गियर और गियर अनुपात के प्रकार का संकेत दिया गया है);
ई) स्टार्ट-अप पर पल का मूल्य, जिसे इलेक्ट्रिक मोटर को तंत्र के ड्राइव शाफ्ट पर प्रदान करना चाहिए;
ई) शक्ति और टोक़ के इसी मूल्यों के ऊपरी और निचले मूल्यों के संकेत के साथ संचालित तंत्र के गति विनियमन की सीमाएं;
छ) आवश्यक गति नियंत्रण की प्रकृति और गुणवत्ता (चिकनाई, ऊंचाई);
एच) एक घंटे के भीतर ड्राइव की शुरुआत या शुरुआत की आवृत्ति; और) पर्यावरणीय विशेषताएं।
सभी शर्तों को ध्यान में रखते हुए इलेक्ट्रिक मोटर का विकल्प कैटलॉग डेटा के अनुसार बनाया गया है।
व्यापक उपयोग तंत्र के लिए, निर्माताओं की प्रासंगिक जानकारी में निहित डेटा द्वारा एक इलेक्ट्रिक मोटर की पसंद को बहुत सरल किया जाता है, और नेटवर्क मापदंडों और पर्यावरण की प्रकृति के संबंध में इलेक्ट्रिक मोटर के प्रकार को निर्दिष्ट करने के लिए फोड़ा जाता है।
मोटर शक्ति का चयन
मोटर पावर का चुनाव कार्य मशीन के भार की प्रकृति के अनुसार किया जाना चाहिए। इस चरित्र का मूल्यांकन दो आधारों पर किया जाता है: 
क) ऑपरेशन के नाममात्र मोड के अनुसार;
b) उपभोग की गई बिजली की मात्रा में परिवर्तन।
ऑपरेशन के निम्नलिखित तरीके हैं:
a) लंबी (लंबी) जब कार्य अवधि इतनी लंबी होती है इलेक्ट्रिक मोटर हीटिंग अपने स्थिर-राज्य मूल्य (उदाहरण के लिए, पंप, बेल्ट कन्वेयर, प्रशंसकों, आदि में) तक पहुंचता है;
ख) अल्पावधि, जब दिए गए भार के अनुरूप इलेक्ट्रिक मोटर द्वारा हीटिंग के तापमान को प्राप्त करने के लिए काम करने की अवधि अपर्याप्त है, और इसके विपरीत, स्टॉप अवधि, बिजली के मोटर को परिवेश के तापमान को ठंडा करने के लिए पर्याप्त है। इस मोड में, इलेक्ट्रिक मोटर्स विभिन्न प्रकार के तंत्र संचालित कर सकते हैं;
ग) रुक-रुक कर - एक सक्रिय अवधि के सापेक्ष 15, 25, 40 और 60% की एक चक्र की अवधि के साथ 10 मिनट से अधिक नहीं (उदाहरण के लिए, क्रेन, कुछ मशीनों, एक-ऑपरेटर वेल्डिंग मोटर जनरेटर, आदि)।
बिजली की खपत में बदलाव के अनुसार, निम्नलिखित मामले अलग-अलग हैं:
a) निरंतर भार, जब ऑपरेशन के दौरान खपत होने वाली बिजली की मात्रा स्थिर होती है या औसत मूल्य से मामूली विचलन होता है, जैसे, उदाहरण के लिए, केन्द्रापसारक पंपों, प्रशंसकों, एक निरंतर हवा के प्रवाह के साथ कम्प्रेसर, आदि।
बी) परिवर्तनीय भार, जब समय-समय पर खपत होने वाली बिजली की मात्रा भिन्न होती है, उदाहरण के लिए, उत्खनन, क्रेन, कुछ मशीनों, आदि में।
ग) पल्सेटिंग लोड, जब बिजली की खपत की मात्रा लगातार बदलती रहती है, उदाहरण के लिए, जैसे पिस्टन पंप, जबड़ा क्रशर, स्क्रीन, आदि।
इलेक्ट्रिक मोटर की शक्ति को तीन शर्तों को पूरा करना होगा:
क) ऑपरेशन के दौरान सामान्य ताप; 
ख) पर्याप्त अधिभार क्षमता;
ग) पर्याप्त प्रारंभिक टोक़।
सभी इलेक्ट्रिक मोटर्स को दो मुख्य समूहों में विभाजित किया गया है:
क) निरंतर संचालन के लिए (समावेशन की अवधि को सीमित किए बिना);
ख) 15, 25, 40 और 60% के स्विचिंग समय के साथ आंतरायिक उपयोग के लिए।
पहले समूह के लिए, कैटलॉग और पासपोर्ट में, बिजली की मोटर जो अनिश्चित काल तक विकसित हो सकती है, को इंगित किया जाता है, दूसरे समूह के लिए - वह शक्ति जो विद्युत मोटर विकसित कर सकती है, एक निश्चित समय के साथ अनिश्चित काल के लिए रुकावटों के साथ काम करना।
सभी मामलों में उचित रूप से चयनित ऐसी इलेक्ट्रिक मोटर को माना जाता है, जो लोड के साथ काम कर रही है, लेकिन वर्किंग मशीन द्वारा निर्धारित शेड्यूल, इसके सभी भागों के पूर्ण अनुमेय हीटिंग को प्राप्त करता है। तथाकथित "पावर मार्जिन" के साथ इलेक्ट्रिक मोटर्स की पसंद, शेड्यूल पर सबसे बड़े संभावित भार के आधार पर, इलेक्ट्रिक मोटर के उपयोग को कम करती है और, इसके परिणामस्वरूप, पूंजीगत लागत में वृद्धि और परिचालन लागत को कम करने के लिए बिजली के कारकों और दक्षता को कम करती है।
मोटर शक्ति में अत्यधिक वृद्धि से त्वरण के दौरान झटके लग सकते हैं।
यदि मोटर को लगातार या थोड़ा अलग लोड के साथ लंबे समय तक काम करना चाहिए, तो इसकी शक्ति का निर्धारण करना मुश्किल नहीं है और सूत्रों के अनुसार बनाया जाता है, आमतौर पर अनुभवजन्य गुणांक सहित।
संचालन के अन्य साधनों के इलेक्ट्रिक मोटर्स की शक्ति का चयन करना अधिक कठिन है।
अल्पकालिक भार को इस तथ्य की विशेषता है कि समावेशन की अवधि कम है, और विद्युत मोटर के पूर्ण शीतलन के लिए ठहराव पर्याप्त हैं। इस मामले में, यह माना जाता है कि स्विचिंग की अवधि के दौरान इलेक्ट्रिक मोटर का लोड स्थिर या लगभग स्थिर रहता है।
इस मोड में हीटिंग के लिए इलेक्ट्रिक मोटर को ठीक से उपयोग करने के लिए, इसे चुनना आवश्यक है ताकि इसकी निरंतर शक्ति (कैटलॉग में इंगित) शॉर्ट-टर्म लोड की तुलना में बिजली से कम हो, यानी कि बिजली की मोटर में अपने अल्पकालिक काम की अवधि के दौरान थर्मल अधिभार हो।
यदि इलेक्ट्रिक मोटर के संचालन की अवधि इसके पूर्ण हीटिंग के लिए आवश्यक समय से काफी कम है, लेकिन स्विचिंग की अवधि के बीच का ठहराव पूर्ण शीतलन के समय की तुलना में काफी कम है, तो एक अल्पकालिक भार होता है।
व्यावहारिक रूप से किसी को इस तरह के काम के बीच अंतर करना चाहिए:
क) काम की अवधि के दौरान लोड परिमाण में स्थिर है और, परिणामस्वरूप, इसके ग्राफ को आयतों के साथ प्रत्यावर्तन के रूप में दर्शाया गया है;
बी) काम की अवधि के दौरान लोड अधिक या कम जटिल कानून के अनुसार भिन्न होता है।
दोनों ही मामलों में, बिजली से बिजली की मोटर चुनने की समस्या को विश्लेषणात्मक और ग्राफिक रूप से हल किया जा सकता है। ये दोनों विधियां जटिल हैं, इसलिए समतुल्य परिमाण की एक सरल विधि व्यावहारिक रूप से अनुशंसित है, जिसमें तीन विधियां शामिल हैं:
ए) औसत वर्ग वर्तमान;
बी) औसत वर्ग शक्ति;
c) माध्य वर्ग क्षण।
मोटर की यांत्रिक अधिभार क्षमता की जाँच करना
हीटिंग की स्थिति के अनुसार मोटर शक्ति का चयन करने के बाद, मोटर की यांत्रिक अधिभार क्षमता की जांच करना आवश्यक है, अर्थात्, सुनिश्चित करें कि ऑपरेशन के दौरान शेड्यूल के अनुसार अधिकतम लोड पल और स्टार्ट-अप पर पल कैटलॉग से अधिकतम पल मूल्य से अधिक नहीं होगा। 
अतुल्यकालिक और सिंक्रोनस इलेक्ट्रिक मोटर्स में, अनुमेय यांत्रिक अधिभार का मान उनके झुकाव विद्युत चुम्बकीय क्षण के कारण होता है, जिस पर ये इलेक्ट्रिक मोटर्स बंद हो जाते हैं।
नाममात्र के संबंध में अधिकतम क्षणों की बहुलता तीन-चरण अतुल्यकालिक इलेक्ट्रिक मोटर्स के लिए 1.8 होनी चाहिए जिसमें स्लिप रिंग एक ही शॉर्ट-सर्कुलेटेड इलेक्ट्रिक मोटर्स के लिए 1.65 से कम न हों। एक तुल्यकालिक मोटर की अधिकतम टोक़ की बहुलता भी रेटेड वोल्टेज, आवृत्ति और उत्तेजना वर्तमान में 1.65 से कम नहीं होनी चाहिए, जिसमें 0.9 का पावर फैक्टर (अग्रणी वर्तमान में) है।
लगभग अतुल्यकालिक और तुल्यकालिक इलेक्ट्रिक मोटर्स में 2-2.5 तक की यांत्रिक अधिभार क्षमता होती है, और कुछ विशेष इलेक्ट्रिक मोटर्स के लिए यह मान 3-3.5 तक बढ़ जाता है।
इलेक्ट्रिक मोटर्स के स्वीकार्य अधिभार प्रत्यक्ष वर्तमान कामकाजी परिस्थितियों से निर्धारित होता है और GOST के अनुसार 2 से 4 तक है, निचली सीमा समानांतर के साथ इलेक्ट्रिक मोटर्स पर लागू होती है, और श्रृंखला उत्तेजना के साथ इलेक्ट्रिक मोटर्स के लिए ऊपरी सीमा।
यदि आपूर्ति और वितरण नेटवर्क लोड करने के लिए संवेदनशील हैं, तो यांत्रिक अधिभार क्षमता को नेटवर्क में वोल्टेज के नुकसान को ध्यान में रखते हुए जांच की जानी चाहिए।
एसिंक्रोनस शॉर्ट-सर्कुलेटेड और सिंक्रोनस इलेक्ट्रिक मोटर्स के लिए, प्रारंभिक क्षण की बहुलता कम से कम 0.9 (नाममात्र के सापेक्ष) होनी चाहिए।
वास्तव में, एक डबल गिलहरी पिंजरे के साथ और एक गहरी नाली के साथ इलेक्ट्रिक मोटर्स में प्रारंभिक क्षण की बहुलता बहुत अधिक है और 2-2.4 तक पहुंच जाती है।
इलेक्ट्रिक मोटर की शक्ति का चयन करते समय यह ध्यान में रखा जाना चाहिए कि इलेक्ट्रिक मोटर्स का हीटिंग समावेशन की आवृत्ति से प्रभावित होता है। समावेशन की अनुमेय आवृत्ति सामान्य स्लिप, रोटर के फ्लाईव्हील टॉर्क और शुरुआती करंट की बहुलता पर निर्भर करती है।
सामान्य प्रकार के अतुल्यकालिक मोटर्स 400 से 1000 तक कोई भार नहीं देते हैं, और बढ़ी हुई पर्ची के साथ इलेक्ट्रिक मोटर्स - 1100 से 2700 प्रति घंटे से शुरू होता है। लोड के तहत शुरू करते समय, प्रारंभ की अनुमत संख्या काफी कम हो जाती है।
शॉर्ट-सर्कुलेटेड रोटर के साथ इलेक्ट्रिक मोटर की शुरुआती धारा का एक बड़ा मूल्य है, और अक्सर शुरू होने की स्थिति में यह परिस्थिति, और विशेष रूप से बढ़े हुए त्वरण समय के साथ, महत्वपूर्ण है।
एक चरण रोटर के साथ इलेक्ट्रिक मोटर्स के विपरीत, जिसमें स्टार्ट-अप के दौरान उत्पन्न गर्मी का एक हिस्सा रिओस्टेट में जारी किया जाता है, अर्थात मशीन के बाहर, शॉर्ट-सर्किट इलेक्ट्रिक मोटर्स में, सभी गर्मी मशीन में ही जारी की जाती है, जो इसके बढ़े हुए हीटिंग का कारण बनती है। इसलिए, इन इलेक्ट्रिक मोटर्स की शक्ति का विकल्प कई शुरुआत के दौरान हीटिंग को ध्यान में रखना चाहिए।
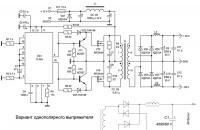
4-6। डीसी विद्युत मोटर की गणना
हम एक प्रत्यक्ष विद्युत मोटर के साथ गणना शुरू करते हैं, क्योंकि इसकी गणना इलेक्ट्रिक मोटर्स की तुलना में सरल और स्पष्ट है। प्रत्यावर्ती धारा। यहां सभी परिकलित मूल्यों की विस्तृत व्याख्या है, जो तब एसी मोटर्स में पाए जाएंगे। गणना द्विध्रुवी इलेक्ट्रिक मोटर्स के लिए अनुक्रमिक उत्तेजना के साथ दी गई है।
मोटर की शक्ति, गति, वोल्टेज को देखते हुए, आप इलेक्ट्रिक मोटर के सभी आयामों और घुमावदार डेटा को निर्धारित कर सकते हैं। इलेक्ट्रिक मोटर की गणना दो मुख्य आयामों के निर्धारण से शुरू होती है, जो आर्मेचर का व्यास और लंबाई है। ये आयाम सूत्र में शामिल हैं:
जहाँ D लंगर का व्यास है, m; एल लंगर की लंबाई है, मी; आर आई - रेटेड शक्ति, डब्ल्यू; ए - आर्मेचर का रैखिक भार, ए / एम; बी - हवा के अंतराल में चुंबकीय प्रेरण, टी; एन - रोटेशन की नाममात्र आवृत्ति, आरपीएम।
इलेक्ट्रिक मोटर की आर्मेचर की लंबाई और व्यास को मीटर में व्यक्त किया जाता है, क्योंकि मोटर के आयामों को प्रेरण और प्रवाह से जोड़ने वाले गणना सूत्र अधिक सुविधाजनक और सरल होते हैं। विभिन्न भागों के निर्माण के व्यावहारिक उद्देश्यों के लिए मीटर में प्राप्त गणना परिणाम आसानी से सेंटीमीटर या मिलीमीटर में परिवर्तित हो सकते हैं।
सूत्र के बाईं ओर एंकर की मात्रा के लिए आनुपातिक है। दरअसल, यदि आप इसे ly से गुणा करते हैं और 4 से विभाजित करते हैं, तो आपको सिलेंडर की मात्रा मिलती है, जो इलेक्ट्रिक मोटर की आर्मेचर है। जैसा कि सूत्र के दाईं ओर से देखा जा सकता है, आर्मेचर का आयतन मोटर P i की शक्ति के समानुपाती होता है और घूर्णन n की आवृत्ति के व्युत्क्रमानुपाती होता है। यहाँ से यह निष्कर्ष निकाला जा सकता है कि मोटर की आर्मेचर के घूमने की आवृत्ति जितनी अधिक होगी, उतनी ही शक्ति में इसका आकार छोटा होगा। और इलेक्ट्रिक मोटर के आकार और अन्य हिस्से एक लंगर के आकार पर निर्भर करते हैं।
बिजली की मोटर की रेटेड शक्ति, डब्ल्यू
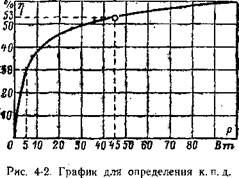
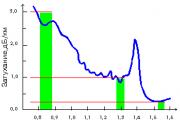
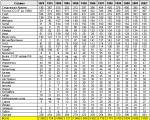
ई कहां है डी। एस।, चुंबकीय क्षेत्र में घूमने के दौरान आर्मेचर वाइंडिंग में प्रेरित, वी; मैं स्रोत से मोटर द्वारा भस्म करंट, ए; पी इलेक्ट्रिक मोटर की रेटेड शक्ति है, डब्ल्यू; η इलेक्ट्रिक मोटर दक्षता है, जिसका मूल्य अंजीर की वक्र के साथ लिया जा सकता है। 4-2; जैसा कि वक्र से देखा जा सकता है, दक्षता मूल्यों में कमी के साथ बिजली की मोटर शक्ति कम हो जाती है।
गणना की गई शक्ति का संख्यात्मक मान (4-2) हल करके प्राप्त किया जाता है, जहां सभी मात्राओं के मूल्यों को जाना जाता है। गणना की गई शक्ति हमेशा इलेक्ट्रिक मोटर की रेटेड शक्ति से अधिक होती है, क्योंकि आपूर्ति की गई ऊर्जा का एक हिस्सा इलेक्ट्रिक मोटर में ही खो जाता है।
विद्युत मोटर, ए द्वारा खपत वर्तमान,
जहां पी रेटेड शक्ति है, डब्ल्यू; यू - नाममात्र तनाव, वी; along अंजीर में वक्र के साथ दक्षता है। 4-2।
अब आप परिभाषित कर सकते हैं और ई। डी। एक। ई, जो भविष्य में आवश्यक होगा:
जहां N आर्मेचर वाइंडिंग में कंडक्टरों की संख्या है; हर में 2 का कारक दिखाता है कुल वर्तमान कलेक्टर प्लेट से एंकर मैं दो घुमावदार कंडक्टरों के बीच शाखाओं में बंटी होती हैं और प्रत्येक कंडक्टर के माध्यम से वर्तमान का केवल आधा हिस्सा गुजरता है; उत्पाद atureD आर्मेचर की परिधि को व्यक्त करता है।
इस प्रकार, रैखिक भार से पता चलता है कि आर्मेचर परिधि की 1 मीटर लंबाई में कितने एम्पीयर हैं। रैखिक अंतर ए और एयर गैप बी में चुंबकीय प्रेरण को विद्युत चुम्बकीय भार कहा जाता है। वे दिखाते हैं कि इलेक्ट्रिक मोटर विद्युत और चुंबकीय शब्दों में कितना भारी है। (4-1) से यह स्पष्ट है कि AB जितना बड़ा उत्पाद होगा, उतना ही छोटा लंगर होगा। लेकिन ए और बी के मूल्य एक निश्चित सीमा से अधिक नहीं होने चाहिए, अन्यथा ऑपरेशन के दौरान इलेक्ट्रिक मोटर बहुत गर्म होगा।
हालांकि, इलेक्ट्रिक मोटर का हीटिंग न केवल विद्युत चुम्बकीय भार पर निर्भर करता है, बल्कि इसके संचालन के समय पर भी निर्भर करता है। कुछ इलेक्ट्रिक मोटर्स बिना रुके लंबे समय तक काम करते हैं, उदाहरण के लिए, प्रशंसकों के इलेक्ट्रिक मोटर्स। अन्य इलेक्ट्रिक मोटर्स आंतरायिक रूप से काम करते हैं, जिसके दौरान वे शांत हो जाते हैं, उदाहरण के लिए, क्रेन, इलेक्ट्रिक खिलाड़ी, वैक्यूम क्लीनर के मॉडल के इलेक्ट्रिक मोटर्स। रुकावट वाले इलेक्ट्रिक मोटर्स के काम को आंतरायिक कहा जाता है। इसका मतलब है कि मोटर थोड़े समय के लिए चालू होती है, फिर एक ब्रेक होता है और मोटर फिर से चालू हो जाती है।
इस तरह के इलेक्ट्रिक मोटर को शामिल करने की अवधि एक निश्चित अवधि के प्रतिशत के रूप में व्यक्त की जाती है, जिसे 10 मिनट के लिए लिया जाता है। उदाहरण के लिए, यदि इलेक्ट्रिक मोटर 2.5 मिनट की अवधि के लिए चलती है, और बाकी समय ऊपर है, तो ऑन-टाइम 25% है। यदि मोटर 4 मिनट के लिए चलती है, तो 40% शामिल किए जाने की अवधि।
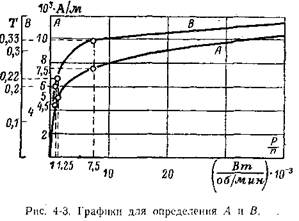
रैखिक भार और चुंबकीय प्रेरण का चुनाव अंजीर के घटता के अनुसार किया जाता है। 4-3, जहां रोटेशन की नाममात्र आवृत्ति के लिए नाममात्र शक्ति का अनुपात क्षैतिज अक्ष के साथ प्लॉट किया जाता है। अंजीर में। 4-3 को इलेक्ट्रिक मोटर्स के लिए ए और बी का मान दिया जाता है, जिसमें लंबे समय तक संचालन होता है। उदाहरण के लिए, अगर 4000 आरपीएम की गति पर 80 डब्ल्यू की शक्ति वाली एक इलेक्ट्रिक मोटर लगातार पूरे लोड पर चलती है, तो हम क्षैतिज अक्ष पर मूल्य 80/4 000 = 20 10 -3 पर सेट करते हैं। ऊर्ध्वाधर रेखा पर हम रैखिक भार ए = ९ ००० ए / एम और हवा के अंतर में प्रेरण की गणना करते हैं बी = ०.३५ डिग्री सेल्सियस।
25% की अवधि के साथ आंतरायिक संचालन के साथ, विद्युत चुम्बकीय भार के मूल्यों को 30% तक बढ़ाया जा सकता है, अर्थात उन्हें 1.3 गुना अधिक लेना चाहिए। तो
A = 9000 1.3 = 11 700 A / m,
और चुंबकीय प्रेरण
बी = 0.35 1.3 = 0.455 टी।
L / d = e द्वारा निरूपित करें। छोटे इलेक्ट्रिक मोटर्स का ई मूल्य 0.4 से 1.6 तक है। यदि एक छोटी लंबाई के साथ एक इलेक्ट्रिक मोटर प्राप्त करना आवश्यक है, लेकिन एक बड़ा व्यास के साथ, तो हम ई = 0.4 लेते हैं। इसके विपरीत, यदि इलेक्ट्रिक मोटर को छोटे व्यास के पाइप में मिलाया जाना चाहिए, तो हम ई = 1.6 चुनते हैं। यदि मोटर के आयाम किसी भी स्थिति से संबंधित नहीं हैं, तो आमतौर पर ई = 1 लेते हैं। बाएं भाग (4-1) में अनुपात l / D = e का परिचय, एक अज्ञात l से मुक्त और (4-1) का रूप है:
डी को परिभाषित करते हुए, हम l = De पाते हैं। इस प्रकार, इलेक्ट्रिक मोटर के मुख्य आयाम निर्धारित किए जाते हैं।
अब हम आर्मेचर वाइंडिंग की गणना की ओर मुड़ते हैं। ऐसा करने के लिए, विद्युत मोटर के चुंबकीय प्रवाह को निर्धारित करना आवश्यक है।
यदि हवा के अंतराल में चुंबकीय प्रेरण उस क्षेत्र से गुणा किया जाता है जिसके माध्यम से बल की रेखाएं लंगर में प्रवेश करती हैं, तो हम विद्युत मोटर के चुंबकीय प्रवाह को प्राप्त करते हैं, जिसे हम ग्रीक अक्षर F (phi) द्वारा दर्शाते हैं:
चुंबकीय प्रवाह को वेबर में मापा जाता है। ग्रीक अक्षर) (ताऊ) ध्रुव विभाजन को दर्शाता है, यानी एक ध्रुव पर गिरने वाली आर्मेचर परिधि का हिस्सा। एक द्विध्रुवी मोटर में, ध्रुव विभाजन b = /D / 2 है। ग्रीक अक्षर a (अल्फा) इंगित करता है कि ध्रुव विभाजन के किस भाग पर पोल b t (चाप 4-5) के चाप द्वारा कब्जा किया गया है। आमतौर पर एक = 0.65 लेते हैं। इस प्रकार, उत्पाद एंकर का सामना करने वाले पोल का क्षेत्र देता है।
एंकर के खांचे की संख्या Z ,3D के अनुपात से निर्धारित की जाती है, जिसमें एंकर का व्यास सेंटर्स में व्यक्त किया जाता है। प्राप्त विषम संख्या के निकटतम लेने की सिफारिश की जाती है। एंकर के कंडक्टर की संख्या सूत्र द्वारा निर्धारित की जाती है
एक स्लॉट में कंडक्टरों की संख्या N z = N / Z गणना में प्राप्त संख्या N z को निकटतम सम संख्या के लिए गोल किया जाना चाहिए, ताकि घुमावदार दो परतों में घाव हो सके। इलेक्ट्रिक मोटर की गणना के संख्यात्मक उदाहरण से खांचे की संख्या और कंडक्टर की संख्या का विकल्प स्पष्ट होगा।
आर्मेचर वाइंडिंग के लिए तार का आकार कंडक्टर में वर्तमान घनत्व द्वारा विभाजित करके निर्धारित किया जा सकता है। वर्तमान घनत्व इंगित करता है कि तार के प्रत्येक वर्ग मिलीमीटर से कितने एम्पीयर गुजरते हैं, और ग्रीक अक्षर ए (डेल्टा) द्वारा निरूपित किया जाता है। इस प्रकार, तार का क्रॉस सेक्शन, मिमी 2,
स्व-निर्मित डीसी मोटर्स के लिए वर्तमान घनत्व को 6 से 12 ए / मिमी 2 तक चुना जाना चाहिए। घुमाव की उच्च आवृत्ति वाले छोटे मोटर्स के लिए, वर्तमान घनत्व को ऊपरी अनुशंसित मूल्य के करीब ले जाया जाता है। कम गति वाले बड़े इंजन कम मूल्य के करीब होते हैं।
वायर s का यह खंड प्रारंभिक है। तालिका के दूसरे कॉलम में। 4-1, आपको एक मानक तार के क्रॉस-सेक्शन को खोजने की आवश्यकता है जो गणना किए गए एक के करीब आता है। इस तालिका के पहले कॉलम में, हम तार व्यास d को पाते हैं। आवश्यक व्यास के तारों की कमी विद्युत मोटर के निर्माण को रोक नहीं सकती है, क्योंकि तार को बदलने के लिए महान अवसर हैं। सबसे पहले, एक तार को दो तारों से बदला जा सकता है, अगर इन तारों का क्रॉस सेक्शन उसी तरह का है जैसे तार को बदला जा रहा है। वायर क्रॉस सेक्शन इसके व्यास के वर्ग पर निर्भर करता है, जिसका अर्थ है कि क्रॉस सेक्शन वाले तार के लिए 2 गुना छोटा है, व्यास on 2 गुना छोटा होगा। उदाहरण के लिए, 0.29 मिमी के व्यास वाले तार के बजाय, आप 0.2 मिमी के व्यास के साथ दो तार ले सकते हैं। इस मामले में, वर्तमान घनत्व लगभग नहीं बदलता है, लेकिन खांचे में तारों की संख्या 2 गुना बढ़ जाएगी। तारों के साथ खांचे को भरने का घनत्व भी बढ़ेगा, क्योंकि प्रत्येक तार में दो-परत इन्सुलेशन होता है। इस तरह की वाइंडिंग को चलाना और अधिक कठिन होगा। विभिन्न व्यास के साथ एक तार को दो से बदलना संभव है। उदाहरण के लिए, 0.29 मिमी के व्यास वाले तार के बजाय, आप दो तार ले सकते हैं: एक 0.31 मिमी के व्यास के साथ और दूसरा 0.27 मिमी के व्यास के साथ। जैसा कि टेबल से देखा जा सकता है। 4 1, दो प्रतिस्थापन तारों के क्रॉस सेक्शन का योग बदले जा रहे तार के क्रॉस सेक्शन के बराबर है:
0.075 + 0.057 = 0.132 मिमी 2।
अंतिम तार व्यास d को चुनना, यह तालिका के लिए आवश्यक है। इन्सुलेशन के दो तरफा मोटाई two जोड़कर, अछूता तार d के व्यास को निर्धारित करने के लिए 4-2:
नाली के आकार का निर्धारण करें। घुमावदार कंडक्टरों के प्लेसमेंट के लिए आवश्यक खांचे एस, मिमी 2 के क्रॉस सेक्शन की गणना सूत्र द्वारा की जा सकती है:
जहां k s स्लॉट भरने वाला गुणांक है, जो दर्शाता है कि कंडक्टर कितनी कसकर खांचे को भरते हैं।
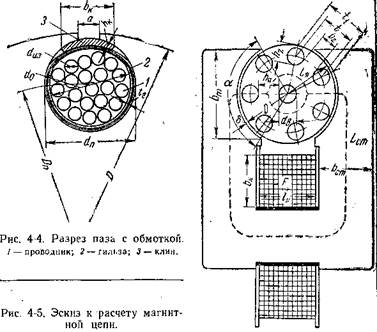
भरण कारक जितना छोटा होता है, उतना बड़ा खांचे का क्षेत्र होना चाहिए। भरण कारक जितना बड़ा होता है और स्लॉट इन्सुलेशन जितना अधिक होता है, उतना ही मुश्किल होता है घुमावदार घुमावदार होना। स्व-निर्मित इलेक्ट्रिक मोटर्स में, 0.2 मिमी मोटी कार्डबोर्ड से एक पायदान आस्तीन 2 के साथ इन्सुलेट करने की सिफारिश की जाती है। घुमावदार के ऊपर, 0.3 मिमी मोटी कार्डबोर्ड का एक कील 3 नाली (चित्रा 4-4) में स्थापित किया गया है। गणनाओं में, आप भरण कारक k 3 = 0,4 ले सकते हैं।
पूर्वनिर्मित इलेक्ट्रिक मोटर्स में, खांचे में एक जटिल नाशपाती के आकार का आकार होता है (चित्र 2-10 देखें) ताकि वे खांचे के बीच दांतों की मोटाई को कमजोर किए बिना अधिक कंडक्टरों को समायोजित कर सकें। स्व-निर्मित इलेक्ट्रिक मोटर्स में, एक दबाए गए आर्मेचर कोर (अंजीर 4-5) में गोल खांचे को ड्रिल करना सबसे आसान है।
नाली का व्यास उसके पार अनुभाग द्वारा निर्धारित किया जाता है:
आसन्न खांचे के केंद्रों के बीच की दूरी, मिमी
और एक दांत की मोटाई, मिमी,
एक संकीर्ण जगह में दांत की मोटाई कम से कम 2 मिमी होनी चाहिए। यदि गणना से दांतों की मोटाई 2 मिमी से कम है, तो आर्मेचर के व्यास को बढ़ाना आवश्यक है। नाली का तार अछूता तार के व्यास से 1 मिमी बड़ा होना चाहिए।
कम वोल्टेज (12 V और नीचे) के लिए इलेक्ट्रिक मोटर्स में कलेक्टर प्लेटों की संख्या को आर्मेचर स्लॉट की संख्या के बराबर लिया जाता है। आर्मेचर घुमावदार को खांचे में रखना और उन्हें कलेक्टर प्लेटों से जोड़ना अध्याय में वर्णित है। 5. कार्बन-ग्रेफाइट ब्रश S y, cm 2 का क्रॉस-सेक्शन, सूत्र द्वारा चुना गया है:
कहाँ? यू - ब्रश के तहत वर्तमान घनत्व,? u = 5 = 8 ए / सेमी 2।
लंगर की गणना के अंत में।
हम चुंबकीय प्रणाली और उत्तेजना घुमावदार की गणना की ओर मुड़ते हैं। एक तात्कालिक इलेक्ट्रिक मोटर के लिए, सबसे आसान तरीका एक खुले प्रकार के चुंबकीय प्रणाली (चित्रा 4-5) का उपयोग करना है। गणना करते समय, सबसे पहले, लंगर और ध्रुवों के बीच हवा का अंतर निर्धारित करें। डीसी मशीनों में, वायु अंतराल का आकार सूत्र द्वारा निर्धारित किया जाता है
ध्रुव चाप का कोण = 0.65 के मान से पाया जा सकता है। आधा परिधि 180 ° है; इसलिए, एक = 180 ° 0.65 = 117 °, 120 ° तक गोल।
चुंबकीय सर्किट के आकार की गणना अनुशंसित के अनुसार की जाती है चुंबकीय प्रेरण उसकी साइटों पर। ध्रुवों और फ्रेम के क्रॉस सेक्शन की गणना करते समय, चुंबकीय प्रवाह 10% बढ़ जाता है, क्योंकि कुछ पंक्तियाँ एंकर को दरकिनार करते हुए फ्रेम के किनारों के बीच बंद हो जाती हैं। इसलिए, ध्रुवों का चुंबकीय प्रवाह और फ्रेम एफ आलेख = 1.1 एफ।
फ्रेम में प्रेरण बी सेंट = 0.5 टी लिया जाता है। बिस्तर एल में बल की रेखा की लंबाई स्केच (छवि 4-5) द्वारा निर्धारित की जाती है। यहां बिंदीदार रेखा चुंबकीय प्रवाह पथ को दर्शाती है। इसमें निम्नलिखित खंड होते हैं: दो वायु अंतराल, दो दांत, एक लंगर और एक बिस्तर। यह पता लगाने के लिए कि कौन सा एन। एक। एक उत्तेजना का तार बनाना चाहिए, n की गणना करना आवश्यक है। एक। (Iw) इन वर्गों में से प्रत्येक के लिए और फिर उनमें से सभी तह। चलो गणना एन शुरू करते हैं। एक। हवा के अंतर से।
दो वायु अंतरालों का चुम्बकीय बल:
जहां δ लंगर के एक तरफ हवा का अंतर है, मी; k k वायु अंतर गुणांक है जो लंगर में खांचे की उपस्थिति के कारण हवा के अंतराल के चुंबकीय प्रतिरोध को ध्यान में रखता है; माना जा सकता है k 1,1 = 1,1; बी - वायु अंतर में प्रेरण, टी।
एन निर्धारित करने के लिए। एक। एंकर के दांतों में इंडक्शन का पता होना चाहिए। दांत की मोटाई (4-12) द्वारा निर्धारित की जाती है। चुंबकीय प्रवाह आर्मेचर की परिधि के एक हिस्से के माध्यम से दांत में प्रवेश करता है, जो दांत के एक मुकुट और नाली के एक स्लॉट द्वारा कब्जा कर लिया जाता है। इसे टी 1 का दांतेदार विभाजन कहा जाता है और यह सूत्र द्वारा निर्धारित किया जाता है
एक दांत में प्रेरण एक हवाई अंतराल में एक प्रेरण से कई गुना अधिक होगा, कितनी बार एक दांत की मोटाई एक डेंटेट डिवीजन से कम है। इसके अलावा, यह ध्यान दिया जाना चाहिए कि स्टील एंकर की चादरों के बीच परतों को इन्सुलेट करके लंगर की लंबाई का हिस्सा कब्जा कर लिया जाता है, जो लगभग 10% है। इसलिए, दांत में प्रेरण सूत्र द्वारा निर्धारित किया जा सकता है
मेज पर यह प्रेरण। 4-3 क्षेत्र ताकत एच जेड से मेल खाती है। एन की गणना करने के लिए। एक। दाँत की ऊँचाई से दो गुना, दाँत की ऊँचाई से H z गुणा करना आवश्यक है। हालाँकि, यह देखते हुए कि गोल स्लॉट्स के साथ दाँत के ऊपरी और निचले हिस्सों में इंडक्शन कम हो जाता है, एक दाँत lw z = H z h z की ऊँचाई से H z गुणा करें।
आर्मेचर कोर में इंडक्शन की गणना करते समय, यह ध्यान रखना आवश्यक है कि इसमें चुंबकीय प्रवाह को ब्रंच किया गया है, और इसलिए फ्लक्स का केवल एक आधा भाग एक अनुभाग के लिए जिम्मेदार है। अंजीर के अनुसार आर्मेचर कोर का क्रॉस सेक्शन। 4-5 नाली के आधार से शाफ्ट तक की दूरी के बराबर है, लंगर की लंबाई से गुणा एल:
चादरों के बीच इन्सुलेट परतों को ध्यान में रखना भी आवश्यक है। इस प्रकार, आर्मेचर कोर में प्रेरण
मेज पर यह प्रेरण। 4-3, H i से मेल खाता है। आर्मेचर कोर का चुम्बकीय बल:
जहाँ एल मैं अंजीर के अनुसार कोर, एम में बल की रेखा की लंबाई है। 4-5:
जैसा कि अंजीर में देखा गया है। 4-5, इस इलेक्ट्रिक मोटर में कोई फैला हुआ खंभा नहीं है, क्योंकि वे फ्रेम में विलय हो गए थे। इसलिए, चुंबकीय सर्किट के निश्चित भाग की गणना फ्रेम की गणना के लिए कम हो जाती है। फ्रेम की चौड़ाई एक दिए गए इंडक्शन B = 0.5 T, m, द्वारा निर्धारित की जाती है
इंडक्शन 0.5 टी के लिए फील्ड स्ट्रेंथ Hst को टेबल में पाया जाता है। 4-3। फ्रेम में बल की रेखा की लंबाई निर्धारित करने में, हम कठिनाई से मिलते हैं, क्योंकि फ्रेम के किनारे की लंबाई कॉइल की मोटाई पर निर्भर करती है, और हम अभी भी इसे नहीं जानते हैं। इसलिए, हम कुंडल की मोटाई को b = 30 δ तक ले जाते हैं, जहां gap वायु का अंतर है। कॉइल की मोटाई और अंतराल के बीच संबंध इस तथ्य के कारण है कि एन मुख्य रूप से अंतराल के आकार पर निर्भर है। एक। कुंडल, और इसलिए कुंडल का आकार। फ्रेम एल सेंट में बल की रेखा की लंबाई का निर्धारण, आप एन की गणना कर सकते हैं। एक। फ्रेम:
अब हम n जोड़ते हैं। एक। सभी साइटें:
ऐसे n। एक। जब मोटर निष्क्रिय हो तो एक कुंडली का निर्माण करना चाहिए। लेकिन लोड के तहत, जब आर्मेचर में करंट बढ़ता है, तो एक डीमैग्नेटाइजिंग प्रभाव दिखाई देगा। चुंबकीय क्षेत्र लंगर। इसलिए एन। एक। कुंडल में कुछ मार्जिन होना चाहिए, जो सूत्र द्वारा गणना की जाती है
इस प्रकार, एन। एक। मोटर लोड के साथ कॉइल
![]()
आर्मेचर करंट एक्साइटेशन कॉइल से होकर गुजरेगा, और इसलिए कॉइल के घुमावों की संख्या w = Iw / I होगी।
तार क्रॉस-सेक्शन का निर्धारण करने के लिए, वर्तमान घनत्व द्वारा वर्तमान ताकत को विभाजित करना आवश्यक है। यह आर्मेचर वाइंडिंग की तुलना में कम लिया जाता है, क्योंकि कॉइल के मोड़ ठीक हो जाते हैं और इसलिए खराब हो जाते हैं।
कुंडल तार अनुभाग, मिमी 2, s = I /?
तालिका के अनुसार। 4-1 हम निकटतम मानक क्रॉस सेक्शन और वायर व्यास पाते हैं। टैब के अनुसार, एक तार का चुना हुआ ब्रांड। 4-2 हम इंसुलेटेड वायर d pz का व्यास पाते हैं। कुंडल की मोटाई का पता लगाने के लिए, आपको कुंडल के घुमावों के कब्जे वाले क्षेत्र, मिमी 2 को जानना होगा, जो सूत्र द्वारा निर्धारित किया जा सकता है
कॉइल की लंबाई से क्षेत्र को विभाजित करना, जिसे स्केच में l को नामित किया गया है, हमें कॉइल की मोटाई, मिमी,
इसलिए, इलेक्ट्रिक मोटर के नाममात्र आंकड़ों के अनुसार, जो केवल तीन संख्याओं में व्यक्त किए जाते हैं, सूत्रों और तालिकाओं का उपयोग करके, हमने इसके निर्माण के लिए आवश्यक इलेक्ट्रिक मोटर के सभी आयामों को निर्धारित किया है। गणना की गई इलेक्ट्रिक मोटर मज़बूती से काम करेगी, और इसकी हीटिंग अनुमेय मानदंडों को नहीं छोड़ेगी। यह विद्युत मोटर की गणना का मूल्य है। क्या गणना के बिना इन सभी आयामों को "अनुमान" करना संभव होगा? संभवतः, संतोषजनक परिणाम प्राप्त करने के लिए इलेक्ट्रिक मोटर को कई बार फिर से तैयार करना होगा, इन परिवर्तनों पर गणना की तुलना में कई बार अधिक समय व्यतीत करना, क्षतिग्रस्त सामग्री का उल्लेख नहीं करना। इसके अलावा, गणना की प्रक्रिया में आपको तकनीकी गणना और इलेक्ट्रिक कारों के सिद्धांत के ज्ञान में एक कौशल प्राप्त होगा।
NV विनोग्रादोव, यू.एन. Vinogradov
इलेक्ट्रिक मोटर की गणना और कैसे करें
मास्को 1974
एक इलेक्ट्रिक मोटर का चयन करने के लिए शर्तें
निम्न परिस्थितियों के पूरा होने पर इलेक्ट्रिक मोटर्स के कैटलॉग प्रकारों में से एक का चुनाव सही माना जाता है:
a) यांत्रिक गुणों पर इलेक्ट्रिक मोटर वर्किंग मशीन (ड्राइव) का सबसे पूर्ण अनुपालन। इसका मतलब यह है कि इलेक्ट्रिक मोटर में एक ऐसी यांत्रिक विशेषता होनी चाहिए, जिस पर यह ड्राइव और गति और त्वरण के आवश्यक मूल्यों को सूचित कर सकता है, दोनों ऑपरेशन के दौरान और स्टार्ट-अप के दौरान;
ख) प्रक्रिया में मोटर शक्ति का अधिकतम उपयोग। संचालन के सबसे गंभीर तरीकों में इलेक्ट्रिक मोटर के सभी सक्रिय भागों का तापमान मानकों द्वारा निर्धारित हीटिंग तापमान के जितना संभव हो उतना करीब होना चाहिए, लेकिन इससे अधिक नहीं;
ग) डिजाइन के संदर्भ में ड्राइव और पर्यावरण की स्थिति के साथ इलेक्ट्रिक मोटर का अनुपालन;
घ) अपने आपूर्ति नेटवर्क के मापदंडों के साथ मोटर का अनुपालन।
इलेक्ट्रिक मोटर की पसंद के लिए निम्न प्रारंभिक डेटा आवश्यक है:
a) तंत्र का नाम और प्रकार;
ख) तंत्र के ड्राइव शाफ्ट पर अधिकतम शक्ति, अगर ऑपरेशन का मोड निरंतर है और लोड स्थिर है, और अन्य मामलों में - समय के एक समारोह के रूप में शक्ति में परिवर्तन या प्रतिरोध के क्षण के ग्राफ;
ग) तंत्र के ड्राइव शाफ्ट के रोटेशन की गति;
डी) मोटर शाफ्ट के साथ तंत्र की अभिव्यक्ति की विधि (यदि गियर हैं, तो गियर और गियर अनुपात के प्रकार का संकेत दिया गया है);
ई) स्टार्ट-अप पर पल का मूल्य, जिसे इलेक्ट्रिक मोटर को तंत्र के ड्राइव शाफ्ट पर प्रदान करना चाहिए;
ई) शक्ति और टोक़ के इसी मूल्यों के ऊपरी और निचले मूल्यों के संकेत के साथ संचालित तंत्र के गति विनियमन की सीमाएं;
छ) आवश्यक गति नियंत्रण की प्रकृति और गुणवत्ता (चिकनाई, ऊंचाई);
एच) एक घंटे के भीतर ड्राइव की शुरुआत या शुरुआत की आवृत्ति; और) पर्यावरणीय विशेषताएं।
सभी शर्तों को ध्यान में रखते हुए इलेक्ट्रिक मोटर का विकल्प कैटलॉग डेटा के अनुसार बनाया गया है।
व्यापक उपयोग तंत्र के लिए, निर्माताओं की प्रासंगिक जानकारी में निहित डेटा द्वारा एक इलेक्ट्रिक मोटर की पसंद को बहुत सरल किया जाता है, और नेटवर्क मापदंडों और पर्यावरण की प्रकृति के संबंध में इलेक्ट्रिक मोटर के प्रकार को निर्दिष्ट करने के लिए फोड़ा जाता है।
मोटर शक्ति का चयन
मोटर पावर का चुनाव कार्य मशीन के भार की प्रकृति के अनुसार किया जाना चाहिए। इस चरित्र का मूल्यांकन दो आधारों पर किया जाता है:
क) ऑपरेशन के नाममात्र मोड के अनुसार;
b) उपभोग की गई बिजली की मात्रा में परिवर्तन।
ऑपरेशन के निम्नलिखित तरीके हैं:
a) लंबी (लंबी) जब कार्य अवधि इतनी लंबी होती है इलेक्ट्रिक मोटर हीटिंग अपने स्थिर-राज्य मूल्य (उदाहरण के लिए, पंप, बेल्ट कन्वेयर, प्रशंसकों, आदि में) तक पहुंचता है;
ख) अल्पावधि, जब दिए गए भार के अनुरूप इलेक्ट्रिक मोटर द्वारा हीटिंग के तापमान को प्राप्त करने के लिए काम करने की अवधि अपर्याप्त है, और इसके विपरीत, स्टॉप अवधि, बिजली के मोटर को परिवेश के तापमान को ठंडा करने के लिए पर्याप्त है। इस मोड में, इलेक्ट्रिक मोटर्स विभिन्न प्रकार के तंत्र संचालित कर सकते हैं;
ग) रुक-रुक कर - एक सक्रिय अवधि के सापेक्ष 15, 25, 40 और 60% की एक चक्र की अवधि के साथ 10 मिनट से अधिक नहीं (उदाहरण के लिए, क्रेन, कुछ मशीनों, एक-ऑपरेटर वेल्डिंग मोटर जनरेटर, आदि)।
बिजली की खपत में बदलाव के अनुसार, निम्नलिखित मामले अलग-अलग हैं:
a) निरंतर भार, जब ऑपरेशन के दौरान खपत होने वाली बिजली की मात्रा स्थिर होती है या औसत मूल्य से मामूली विचलन होता है, जैसे, उदाहरण के लिए, केन्द्रापसारक पंपों, प्रशंसकों, एक निरंतर हवा के प्रवाह के साथ कम्प्रेसर, आदि।
बी) परिवर्तनीय भार, जब समय-समय पर खपत होने वाली बिजली की मात्रा भिन्न होती है, उदाहरण के लिए, उत्खनन, क्रेन, कुछ मशीनों, आदि में।
ग) पल्सेटिंग लोड, जब बिजली की खपत की मात्रा लगातार बदलती रहती है, उदाहरण के लिए, जैसे पिस्टन पंप, जबड़ा क्रशर, स्क्रीन, आदि।
इलेक्ट्रिक मोटर की शक्ति को तीन शर्तों को पूरा करना होगा:
क) ऑपरेशन के दौरान सामान्य ताप;
ख) पर्याप्त अधिभार क्षमता;
ग) पर्याप्त प्रारंभिक टोक़।
सभी इलेक्ट्रिक मोटर्स को दो मुख्य समूहों में विभाजित किया गया है:
क) निरंतर संचालन के लिए (समावेशन की अवधि को सीमित किए बिना);
ख) 15, 25, 40 और 60% के स्विचिंग समय के साथ आंतरायिक उपयोग के लिए।
पहले समूह के लिए, कैटलॉग और पासपोर्ट में, बिजली की मोटर जो अनिश्चित काल तक विकसित हो सकती है, को इंगित किया जाता है, दूसरे समूह के लिए - वह शक्ति जो विद्युत मोटर विकसित कर सकती है, एक निश्चित समय के साथ अनिश्चित काल के लिए रुकावटों के साथ काम करना।
सभी मामलों में उचित रूप से चयनित ऐसी इलेक्ट्रिक मोटर को माना जाता है, जो लोड के साथ काम कर रही है, लेकिन वर्किंग मशीन द्वारा निर्धारित शेड्यूल, इसके सभी भागों के पूर्ण अनुमेय हीटिंग को प्राप्त करता है। तथाकथित "पावर मार्जिन" के साथ इलेक्ट्रिक मोटर्स की पसंद, शेड्यूल पर सबसे बड़े संभावित भार के आधार पर, इलेक्ट्रिक मोटर के उपयोग को कम करती है और, इसके परिणामस्वरूप, पूंजीगत लागत में वृद्धि और परिचालन लागत को कम करने के लिए बिजली के कारकों और दक्षता को कम करती है।
मोटर शक्ति में अत्यधिक वृद्धि से त्वरण के दौरान झटके लग सकते हैं।
यदि मोटर को लगातार या थोड़ा अलग लोड के साथ लंबे समय तक काम करना चाहिए, तो इसकी शक्ति का निर्धारण करना मुश्किल नहीं है और सूत्रों के अनुसार बनाया जाता है, आमतौर पर अनुभवजन्य गुणांक सहित।
संचालन के अन्य साधनों के इलेक्ट्रिक मोटर्स की शक्ति का चयन करना अधिक कठिन है।
अल्पकालिक भार को इस तथ्य की विशेषता है कि समावेशन की अवधि कम है, और विद्युत मोटर के पूर्ण शीतलन के लिए ठहराव पर्याप्त हैं। इस मामले में, यह माना जाता है कि स्विचिंग की अवधि के दौरान इलेक्ट्रिक मोटर का लोड स्थिर या लगभग स्थिर रहता है।
इस मोड में हीटिंग के लिए इलेक्ट्रिक मोटर को ठीक से उपयोग करने के लिए, इसे चुनना आवश्यक है ताकि इसकी निरंतर शक्ति (कैटलॉग में इंगित) शॉर्ट-टर्म लोड की तुलना में बिजली से कम हो, यानी कि बिजली की मोटर में अपने अल्पकालिक काम की अवधि के दौरान थर्मल अधिभार हो।
यदि इलेक्ट्रिक मोटर के संचालन की अवधि इसके पूर्ण हीटिंग के लिए आवश्यक समय से काफी कम है, लेकिन स्विचिंग की अवधि के बीच का ठहराव पूर्ण शीतलन के समय की तुलना में काफी कम है, तो एक अल्पकालिक भार होता है।
व्यावहारिक रूप से किसी को इस तरह के काम के बीच अंतर करना चाहिए:
क) काम की अवधि के दौरान लोड परिमाण में स्थिर है और, परिणामस्वरूप, इसके ग्राफ को आयतों के साथ प्रत्यावर्तन के रूप में दर्शाया गया है;
बी) काम की अवधि के दौरान लोड अधिक या कम जटिल कानून के अनुसार भिन्न होता है।
दोनों ही मामलों में, बिजली से बिजली की मोटर चुनने की समस्या को विश्लेषणात्मक और ग्राफिक रूप से हल किया जा सकता है। ये दोनों विधियां जटिल हैं, इसलिए समतुल्य परिमाण की एक सरल विधि व्यावहारिक रूप से अनुशंसित है, जिसमें तीन विधियां शामिल हैं:
ए) औसत वर्ग वर्तमान;
बी) औसत वर्ग शक्ति;
c) माध्य वर्ग क्षण।
मोटर की यांत्रिक अधिभार क्षमता की जाँच करना
हीटिंग की स्थिति के अनुसार मोटर शक्ति का चयन करने के बाद, मोटर की यांत्रिक अधिभार क्षमता की जांच करना आवश्यक है, अर्थात्, सुनिश्चित करें कि ऑपरेशन के दौरान शेड्यूल के अनुसार अधिकतम लोड पल और स्टार्ट-अप पर पल कैटलॉग से अधिकतम पल मूल्य से अधिक नहीं होगा।
अतुल्यकालिक और सिंक्रोनस इलेक्ट्रिक मोटर्स में, अनुमेय यांत्रिक अधिभार का मान उनके झुकाव विद्युत चुम्बकीय क्षण के कारण होता है, जिस पर ये इलेक्ट्रिक मोटर्स बंद हो जाते हैं।
नाममात्र के संबंध में अधिकतम क्षणों की बहुलता तीन-चरण अतुल्यकालिक इलेक्ट्रिक मोटर्स के लिए 1.8 होनी चाहिए जिसमें स्लिप रिंग एक ही शॉर्ट-सर्कुलेटेड इलेक्ट्रिक मोटर्स के लिए 1.65 से कम न हों। एक तुल्यकालिक मोटर की अधिकतम टोक़ की बहुलता भी रेटेड वोल्टेज, आवृत्ति और उत्तेजना वर्तमान में 1.65 से कम नहीं होनी चाहिए, जिसमें 0.9 का पावर फैक्टर (अग्रणी वर्तमान में) है।
लगभग अतुल्यकालिक और तुल्यकालिक इलेक्ट्रिक मोटर्स में 2-2.5 तक की यांत्रिक अधिभार क्षमता होती है, और कुछ विशेष इलेक्ट्रिक मोटर्स के लिए यह मान 3-3.5 तक बढ़ जाता है।
प्रत्यक्ष वर्तमान के इलेक्ट्रिक मोटर्स के अनुमेय अधिभार को काम की परिस्थितियों से निर्धारित किया जाता है और GOST के अनुसार 2 से 4 तक है, निचली सीमा समानांतर के साथ इलेक्ट्रिक मोटर्स पर लागू होती है, और श्रृंखला उत्तेजना के साथ इलेक्ट्रिक मोटर्स की ऊपरी सीमा।
यदि आपूर्ति और वितरण नेटवर्क लोड करने के लिए संवेदनशील हैं, तो यांत्रिक अधिभार क्षमता को नेटवर्क में वोल्टेज के नुकसान को ध्यान में रखते हुए जांच की जानी चाहिए।
एसिंक्रोनस शॉर्ट-सर्कुलेटेड और सिंक्रोनस इलेक्ट्रिक मोटर्स के लिए, प्रारंभिक क्षण की बहुलता कम से कम 0.9 (नाममात्र के सापेक्ष) होनी चाहिए।
वास्तव में, एक डबल गिलहरी पिंजरे के साथ और एक गहरी नाली के साथ इलेक्ट्रिक मोटर्स में प्रारंभिक क्षण की बहुलता बहुत अधिक है और 2-2.4 तक पहुंच जाती है।
इलेक्ट्रिक मोटर की शक्ति का चयन करते समय यह ध्यान में रखा जाना चाहिए कि इलेक्ट्रिक मोटर्स का हीटिंग समावेशन की आवृत्ति से प्रभावित होता है। समावेशन की अनुमेय आवृत्ति सामान्य स्लिप, रोटर के फ्लाईव्हील टॉर्क और शुरुआती करंट की बहुलता पर निर्भर करती है।
सामान्य प्रकार के अतुल्यकालिक मोटर्स 400 से 1000 तक कोई भार नहीं देते हैं, और बढ़ी हुई पर्ची के साथ इलेक्ट्रिक मोटर्स - 1100 से 2700 प्रति घंटे से शुरू होता है। लोड के तहत शुरू करते समय, प्रारंभ की अनुमत संख्या काफी कम हो जाती है।
शॉर्ट-सर्कुलेटेड रोटर के साथ इलेक्ट्रिक मोटर की शुरुआती धारा का एक बड़ा मूल्य है, और अक्सर शुरू होने की स्थिति में यह परिस्थिति, और विशेष रूप से बढ़े हुए त्वरण समय के साथ, महत्वपूर्ण है।
एक चरण रोटर के साथ इलेक्ट्रिक मोटर्स के विपरीत, जिसमें स्टार्ट-अप के दौरान उत्पन्न गर्मी का एक हिस्सा रिओस्टेट में जारी किया जाता है, अर्थात मशीन के बाहर, शॉर्ट-सर्किट इलेक्ट्रिक मोटर्स में, सभी गर्मी मशीन में ही जारी की जाती है, जो इसके बढ़े हुए हीटिंग का कारण बनती है। इसलिए, इन इलेक्ट्रिक मोटर्स की शक्ति का विकल्प कई शुरुआत के दौरान हीटिंग को ध्यान में रखना चाहिए।
सभी को शुभ दिन। पिछले लेख में मैंने समीक्षा की, जिसमें विद्युत परिपथों के स्रोत के संबंध में ...

कमरे में हवा की उच्च गुणवत्ता वाले विनिमय अपार्टमेंट में रहने के आराम को काफी प्रभावित करते हैं। स्वच्छ हवा, सूखी ...
फाइबर-ऑप्टिक संचार लाइनें संचार का एक प्रकार है जिसमें सूचना को ऑप्टिकल ढांकता हुआ के माध्यम से प्रेषित किया जाता है ...
कंटेंट: आधुनिक परिस्थितियों में, इलेक्ट्रोमैकेनिकल में सुधार के लिए लगातार प्रयास किए जा रहे हैं ...

कमरे को एक अद्वितीय और मूल डिजाइन देने के लिए इंटीरियर की व्यवस्था में सजावटी विवरणों में मदद मिलेगी। झूमर पर ...
इंडक्शन सिस्टम डिवाइस - इंस्ट्रूमेंट मेकिंग सेक्शन, ANALOG ELECTRIC MEASUREMENT DEVICES Design and Principles ...

समस्या - एक संकेतक के साथ स्विच को कैसे जोड़ा जाए - वास्तव में ऐसा नहीं है, क्योंकि यह ...

एक निजी घर या अपार्टमेंट ग्राउंडिंग। कई लोग आश्चर्य करते हैं कि उन्हें एक निजी घर में रखा जाना चाहिए या ...

दृष्टि की विकृति के बीच, दृष्टिवैषम्य, दृश्य फ़ोकस का एक विकार, अक्सर होता है। यार, ...

दुनिया में सबसे आम इलेक्ट्रिक मोटर्स, बेशक, अतुल्यकालिक मोटर्स हैं। आदेश में ...
("बरनचिकोव ईवी पाठ्यपुस्तक" भूगोल "अध्याय 2, पृष्ठ 21 - 32) पृष्ठ पर विषय के अलावा)
नताल्या वोरोनिना पीएच.डी. OAO "LUKOIL" के कर लेखा पद्धति विभाग के विशेषज्ञ ...।

तो, 380 V का वोल्टेज कुछ स्विचबोर्ड पर क्यों आता है और 220 का कुछ में? कुछ क्यों करें ...

तेल और गैस उद्योग का विकास हमारे देश की अर्थव्यवस्था के मुख्य पहलुओं में से एक है। रूसी का हिस्सा ...
कार इनवर्टर 12-220 काफी उपयुक्त उपकरण हैं। वे करने के लिए उपयोग किया जाता है ...

दृष्टि की सामान्य विकृति - दृष्टिवैषम्य - कॉर्निया या लेंस की असमान सतह का कारण बनता है ...