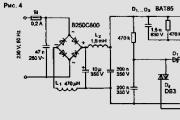
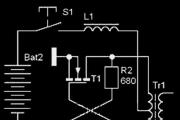
Ako funguje elektronický predradník a jeho obvod
Ak niekto nevie, ako žiarivky fungujú, potom dôležitým bodom je elektrický prúd, ale nie v ...
Existujú dva typy trojfázových elektromotorov, ktoré sa líšia konštrukciou rotujúcej časti (rotora). Pohyblivá časť motora sa niekedy nazýva kotva, ale bude vhodnejšie a profesionálnejšie ju nazývať rotor.
Asynchrónne elektromotory.
Ak rotor elektromotora nemá svoje vlastné vinutie (napätie nie je aplikované na rotor cez kefy), potom je to motor s rotorom vačkovej klietky, alebo ako ho nazývam asynchrónnym motorom. Je asynchrónny, pretože v tomto motore sa rýchlosť zmeny magnetickej indukcie vo vinutiach statora nezhoduje (nie synchrónne) s rýchlosťou otáčania rotora. Existuje viac takýchto trojfázových motorov kvôli jednoduchosti konštrukcie.
Elektromotor s fázovým rotorom.
Trojfázový elektromotor, v ktorom rotor má svoje vlastné vinutia a napätie, ktoré je na tieto vinutia privádzané pomocou kefiek, sa nazýva motor s fázovým rotorom. Komplexná konštrukcia takéhoto elektromotora je opodstatnená, keď je potrebné regulovať rýchlosť otáčania a je potrebné znížiť štartovacie prúdy výkonného motora.
Stator (pevná časť) všetkých trojfázových elektromotorov je v konštrukcii identický. V magnetickom jadre statora sú štrukturálne zabudované vinutia medených vinutí. Počet jednotlivých vinutí môže byť od 3, 6, 9 12. Pri troch vinutiach sa motor pri pripojení k sieti otáča rýchlosťou 3000 ot / min. v minútach Pri šiestich, deviatich, dvanástich vinutiach sa elektromotory otáčajú pri rýchlostiach 1500, 1000, 750 ot / min. za minútu, ale s väčším krútiacim momentom, než je motor pri 3000 ot / min. v minútach
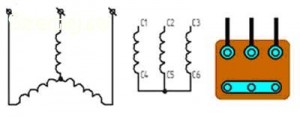
Všetky hodnoty otáčok jednotlivých motorov sa dosahujú len vtedy, keď sú pripojené k trojfázovej sieti s napätím 380V, keď sú vinutia statora pripojené podľa hviezdicového obvodu.
Princíp činnosti.
Je to všetko o magnetickej indukcii, ktorá tiež robí užitočnú prácu v elektromagnetoch a transformátoroch. V dôsledku magnetickej indukcie priťahujú kovové súčiastky do priložených elektromagnetov. V dôsledku rovnakého výkonu v transformátoroch sa elektrina prenáša z jednej cievky na druhú, ktoré sú od seba izolované.
V elektromotoroch dochádza k magnetickej indukcii, keď je vytvorené spojenie medzi statorom a rotorom. Podrobnejšie sa to deje nasledovne. Prúd prechádzajúci vinutiami statora elektromotora vytvára magnetické pole. Toto pole nie je trvalé, ako v elektromagnete alebo transformátore. A rýchlo striedavo mení svoju polaritu a vracia sa do pôvodného stavu, keď sa otáča pozdĺž vinutí statora.
Výhodou tohto elektromagnetického poľa je, že v dôsledku sily indukcie magnetizuje samostatný úsek na povrchu rotora, rovnobežne s fyzickou osou motora. A potom ho striedavé magnetické pole ťahá pozdĺž, čím núti stator otáčať sa okolo svojej osi.
Núdzový režim prevádzky (pri výpadku fázy).
Akékoľvek poškodenie motora motorom je núdzová situácia, ktorá vedie k poškodeniu samotného motora a pripojených štartovacích zariadení. Závažnosť následkov výpadku fázy závisí od toho, na ktorý obvod sú vinutia motora pripojené k sieti.
Pri pripájaní motora podľa schémy "hviezda".
Ak motor pracoval, rotor sa bude otáčať rovnakým krútiacim momentom, ale jeho rýchlosť otáčania sa výrazne zníži. Súčasne, v zostávajúcich vinutiach, ktoré zostanú pripojené k napätiu, bude prúdiť nadhodnotený prúd, ktorý je rovnako veľký v týchto dvoch vinutiach.
Ak necháte motor počas dlhého prerušenia dlhšiu dobu v chode, obe pripojené vinutia sa rovnomerne zohrejú. Nakoniec, motor nie je najviac zaťažený a dobre vyrobený, môže zostať relatívne neporušený. Izolačný odpor vodičov vinutia sa však zníži, pretože pri prehriatí sa zablokuje. Elektromotor už nebude znášať takéto opakované trápenia.
Pri pripájaní motora pod "trojuholník".
Ak motor pracoval, rotor sa bude ďalej otáčať, ako v predchádzajúcom prípade. Súčasne však v jednom zo zostávajúcich pripojených vinutí bude prúdiť nadmerne veľké množstvo 1,73-násobku prúdu ako pri normálnej prevádzke.
Ak teda necháte motor dlhšiu dobu v chode, keď je fáza prerušená, jeden z dvoch pripojených vinutí sa veľmi zahreje. A samotný motor, prípadne fajčiť a zastaviť. Pretože je sklovinová izolácia na vodičoch vinutia vnútri motora zničená a dôjde ku skratu.
Ak sa pokúsite spustiť motor s odpojenou fázou, nezačne sa vôbec otáčať, alebo sa bude pomaly zvyšovať rýchlosť. A bez ohľadu na to, s akou schémou je motor pripojený. V tomto prípade bude motor veľmi hlučný v dôsledku nadmerného magnetického toku, ktorý prechádza cez časť magnetického obvodu motora.
Ak sa rozbijú dve fázy, pracovný motor sa zastaví, motor nebeží a nebudú žiadne škodlivé následky.
Pripojenie k jednofázovej sieti.
Veľmi často existuje potreba použiť trojfázový motor namiesto jednofázového motora na práčke, ventilátore, rôznych drevoobrábacích strojoch, vodných čerpadlách, brúskach.
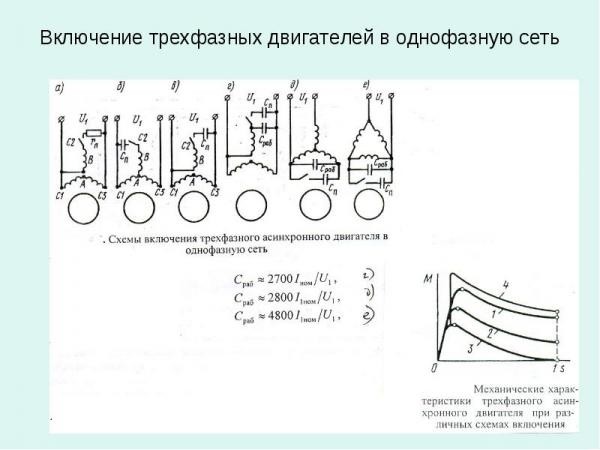
Elektromotory sa najčastejšie pripájajú podľa schémy „hviezda“, pretože v tomto prípade sa môžu použiť v trojfázovej sieti, tj pri maximálnom prevádzkovom napätí 380V. Ale keď je pripojený k jednofázovej sieti, pri zníženom napätí 220V, takáto schéma nie je vôbec vhodná. Pretože elektromotor pripojený podľa schémy „hviezda“ k jednofázovej sieti stratí polovicu svojho výkonu.
Konkrétne, spojenie podľa schémy „hviezda“ je vtedy, keď sú konce troch vinutí spolu skrútené a začiatky týchto vinutí sú pripojené na sieť.
Takto sú vodiče pripojené na svorkovnicu, a preto by mali byť prepojky umiestnené v rozvodnej skrinke elektromotora pri pripojení podľa schémy „hviezda“.
Podľa "trojuholníka".
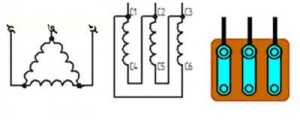
Ak potrebujete pripojiť trojfázový elektromotor na jednofázovú sieť s napätím 220V, potom je potrebné vinutia zostaviť podľa schémy „trojuholník“. Skutočnosťou, že s takýmto systémom začlenenia, stratí motor len 30% menovitého výkonu. Okrem toho sa rýchlosť otáčania vôbec neznižuje.
Všeobecne platí, že na vykonanie delta spojenia, musíte pripojiť koniec jedného vinutia na začiatok druhého, a tak pripojte všetky vinutia v sérii, a pripojte ich pripojovacie body k sieti.
Takže vodiče na svorkovnici by mali byť pripojené a prepojky sú umiestnené vo svorke elektromotora, keď sú zapojené do "trojuholníkového" systému.
Buďte pozorní! Existujú trojfázové elektromotory určené pre prevádzkové napätie 220 / 127V. A ak takýto motor prepnete na „delta“ obvod, to znamená nízke napätie 127V, a potom ho zapojíte do jednofázovej siete so štandardným napätím 220V, motor bude rýchlo horieť.
Aby mohol trojfázový elektromotor pracovať v jednofázovej sieti, bude stále potrebný fázový radič, alebo, ako sa to tiež nazýva, pracovný kondenzátor.
Nakoniec, musíte pripojiť konce kondenzátora fázového posunu na dve svorky v termináli a hodiť dva vodiče zo siete, ako je táto: jeden na ľubovoľný výstup kondenzátora; za sekundu na bezplatný terminál.

Skutočnosť, že asynchrónne motory sa dnes používajú vo všetkých priemyselných odvetviach a poľnohospodárstve, je potrebné pokloniť sa ruskému inžinierovi MO. DOLIVA-Dobrovolského. To bol on, kto v roku 1889 (alebo skôr 8. marca) vynašiel trojfázový asynchrónny motor, ktorý premieňa elektrickú energiu na mechanickú energiu (rotáciu). V skutočnosti to bol prelom v technológii a začiatok novej éry.
Najdôležitejšie je, že elektromotory tohto typu sa ukázali ako veľmi spoľahlivé, ich výroba je pomerne jednoduchá, čo ovplyvňuje nízke náklady na výrobok. Navyše jednoduchý dizajn, ktorý sa ľahko hodí nielen na výrobu, ale aj na opravu. Ak sa pozrieme na štatistiky, potom môžeme konštatovať, že asynchrónne motory sú najviac vyrábané na svete. Predstavujú až 90% problému. Takže čísla hovoria samy za seba.
Prečo sa však tieto zariadenia nazývajú asynchrónne? Faktom je, že frekvencia otáčania magnetického poľa statora je vždy väčšia ako rotácia rotora. Mimochodom, pre elektromotory tohto typu je princíp činnosti založený práve na rotácii magnetického poľa.
Aby sme pochopili, ako asynchrónne trojfázové elektromotory pracujú, je potrebné vykonať jeden jednoduchý experiment. K tomu potrebujete konvenčný magnet v tvare podkovy a medenú tyč. V tomto prípade musí byť magnet dobre pripevnený k rukoväti, pomocou ktorého môže byť skrútený na jednom mieste okolo svojej osi. Medená tyč je upevnená v ložiskách a inštalovaná v priestore medzi koncami (póly) magnetu podkovy. To znamená, že tyč sa zdá byť vo vnútri magnetu, alebo skôr vo vnútri roviny otáčania.
Teraz stačí magnetické zariadenie otočiť o rukoväť. Lepšie v smere hodinových ručičiek. Pretože medzi pólmi je magnetické pole, bude sa tiež otáčať. Súčasne bude pole krížiť alebo narezať medený valec so svojimi elektrickými vedeniami. A tu je zahrnutý zákon elektromagnetickej indukcie. To znamená, že vo vnútri medenej tyče sa začnú tvoriť vírivé prúdy. Na druhej strane začnú tvoriť svoje vlastné magnetické pole, ktoré bude spolupôsobiť s hlavným magnetickým poľom.
V tomto prípade sa tyč začne otáčať v rovnakom smere ako magnet. A tu je jeden moment, ktorý spočíva aj v princípe činnosti elektromotora. Už bolo spomenuté. Ak je rýchlosť otáčania tyče rovnaká ako rýchlosť magnetu, ich silové čiary sa nepretínajú. To znamená, že rotácia nebude spôsobená absenciou vírivých prúdov.
A pár nuansy:

Varovanie! Rozdiel v rýchlosti otáčania magnetických polí nie je príliš veľký. Táto hodnota sa nazýva sklz.
Mimochodom, je ľahké určiť výšku sklzu, na to musíte použiť vzorec:
S = n-nl / n, kde
Vyššie uvedené zariadenie sa samozrejme nemôže nazývať elektromotor, pretože napríklad sa použil magnet, ktorý jednoducho nie je v motore. Preto je potrebné vytvoriť takú štruktúru, v ktorej by elektrický prúd vytvoril toto veľmi magnetické pole. Okrem toho sa musí otáčať. Ruský vedec to dokázal pomocou trojfázového striedavého prúdu.
Preto pri konštrukcii trojfázového asynchrónneho motora sú nainštalované tri vinutia, ktoré sú umiestnené voči sebe v uhle 120 °. Každé vinutie je pripojené na trojfázový striedavý fázový obvod. Vinutia sú pripevnené k statoru, ktorým je kovové jadro vo forme dutého puzdra. Sú pripevnené k pólom jadra.
Varovanie! Každé vinutie má dva voľné konce. Jeden sa pripája k sieťovej fáze, druhý k ostatným dvom koncom ostatných dvoch vinutí, to znamená do jedného okruhu.
Vo vnútri dutého jadra je na ložiskách upevnený rotor. V skutočnosti je to ten istý valec. Nižšie je schéma zapojenia vinutí a umiestnenia rotora.

Akonáhle elektrický prúd začne prúdiť na vinutiach, vytvára sa rotujúce magnetické pole, ktoré pôsobí na rotor, čo spôsobuje jeho otáčanie.
Pre pochopenie princípu trojfázového asynchrónneho motora je potrebné zvážiť harmonogram jeho práce. Na uľahčenie tejto úlohy navrhujeme zvážiť nižšie uvedenú schému.
Zmena polarity vytvára rotáciu magnetického toku, ktorý so sebou nesie rotor. Ten sa začína otáčať. Ako je uvedené vyššie, rotačná energia (mechanická) sa získava z elektrickej energie.
Varovanie! Ak prepnete druhé a tretie vinutie, otáčanie elektromotora začne v opačnom smere. Samozrejme, samotné vinutia nie sú preusporiadané, ale jednoducho zmena v spojení s rôznymi fázami siete.
Uvažovali sme o návrhu asynchrónneho trojfázového elektromotora s tromi vinutiami na statore, ktorý využíva obvod bipolárneho magnetického poľa. Počet otáčok sa rovná počtu oscilácií elektrického prúdu za minútu. Ak je počet oscilácií za sekundu v AC sieti 50 Hz, potom za minútu bude táto hodnota 3000 (rpm).

Nie je však možné položiť do statora tri vinutia. Môžete napríklad nastaviť šesť alebo desať. V tomto prípade sa magnetické pole stane štvorpólovým resp. Šesťpólovým. Zároveň sa zmenia aj otáčky rotora. V prvom prípade sa bude rovnať: (50X60) / 2 = 1500 r / min. V druhom: (50X60) / 3 = 1000 ot./min.
Vyššie sme už uviedli, že v rotácii rotora z rotácie magnetického poľa dochádza k určitému oneskoreniu. Je pravda, že táto hodnota je zanedbateľná. Napríklad v pohotovostnom režime bude tento indikátor iba 3%, s aktívnym zaťažením 5-7%. Aj 7% je malá hodnota, ktorá je jednou z výhod asynchrónneho motora.
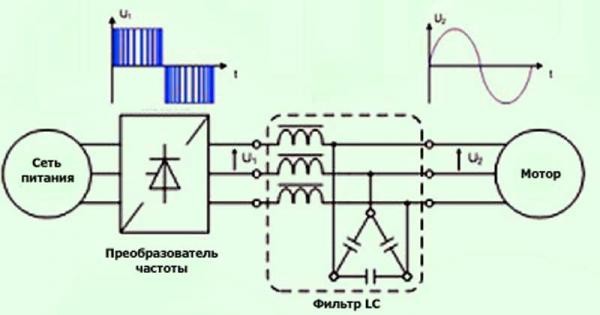
Bohužiaľ, nie všetky súkromné domy majú trojfázové napätie. Preto je spojenie trojfázového asynchrónneho motora s jednofázovou sieťou realizované prostredníctvom kondenzátorov s určitou kapacitou. Výpočet sa zvyčajne vykonáva podľa: na 1 kW výkonu 70 μF. Ale je tu ďalší problém v tejto veci - neschopnosť regulovať rýchlosť otáčania rotora. Preto odborníci odporúčajú pripojenie trojfázových asynchrónnych motorov k regulátoru otáčok motora.
Tieto zariadenia sa teraz predávajú v špecializovaných predajniach, ale nie sú žiadne problémy s ich vlastnými rukami.
Pri konštrukcii rotora sú asynchrónne elektromotory rozdelené do dvoch skupín:
Prvou možnosťou sú motory s vysokým výkonom, ktoré vyžadujú veľký štartovací moment. Konštrukcia ich klzných krúžkov namontovaných na rotore. Druhou možnosťou je konštrukcia, v ktorej drážkach sú položené medené tyče. Jedná sa o typické elektrické motory, jednoduché a lacné. Ale majú niekoľko nevýhod: veľký štartovací prúd a slabá sila na začiatku rotácie.

Čo zvyčajne treba venovať pozornosť pri výbere elektromotorov? Technické vlastnosti, v zásade trochu. Toto je výkon meraný v kW, otáčky rotora v otáčkach. Všetky ostatné špecifikácie nie sú natoľko dôležité. Hoci napríklad hmotnosť výrobku môže pomôcť vypočítať zaťaženie stojana alebo montážneho rámu.
Tak boli považované za asynchrónne elektromotory - elektrické zariadenia, ktoré sa často používajú v domácnostiach na domáce potreby. Zariadenie a princíp činnosti motora, ktorému teraz rozumiete, ale ako pripojiť motor k jednofázovej sieti, si prečítajte v inom článku.
Súvisiace príspevky: 
Jednoduchosť výroby, nízke náklady, spoľahlivosť v práci viedli k tomu, že asynchrónny motor (BP) sa stal najbežnejším elektromotorom. Môžu pracovať ako z trojfázovej elektrickej siete, tak z jednofázovej siete.
Používajú sa trojfázové asynchrónne motory:
V neregulovaných elektrických pohonoch čerpadiel, ventilátorov, kompresorov, dúchadiel, odsávačov dymu, dopravníkov, automatických liniek, kovacích a lisovacích strojov atď.
V nastaviteľných elektrických pohonoch strojov na obrábanie kovov, manipulátorov, robotov, zdvíhacích mechanizmov, všeobecných priemyselných mechanizmov s rôznou produktivitou atď.
V závislosti na spôsobe uskutočnenia rotorového vinutia indukčného motora sú tieto usporiadané do dvoch skupín: motory so skráteným vinutím na rotore a motory s fázovým vinutím na rotore.
Motory s krátko vinutým vinutím na rotore sú lacnejšie na výrobu, spoľahlivé pri prevádzke, majú tuhé mechanické vlastnosti, t.j. keď sa zaťaženie mení z nuly na nominálnu, rýchlosť stroja klesá len o 2 - 5%. Nevýhody takýchto motorov zahŕňajú obtiažnosť plynulého nastavenia rýchlosti otáčania v širokom rozsahu, relatívne malý štartovací moment, ako aj veľké štartovacie prúdy, 5-7 krát vyššie ako nominálne.
Tieto nevýhody nemajú motory s fázovým rotorom, ale konštrukcia rotora je oveľa zložitejšia, čo vedie k zvýšeniu nákladov na motor ako celok. Preto sa používajú v prípade náročných štartovacích podmienok av prípade potreby plynulej regulácie otáčok v širokom rozsahu. Pri laboratórnych prácach sa berie do úvahy motor s rotorom s klietkou.
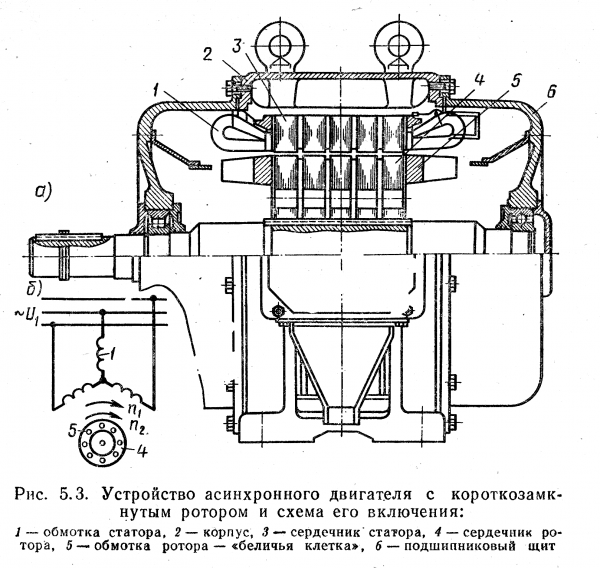
Trojfázový asynchrónny motor má stacionárnu časť - stator 6 (obr. 6.1), na ktorom je umiestnené vinutie, ktoré vytvára rotujúce magnetické pole, a pohyblivú časť - rotor 5 (obr. 6.1), v ktorom je vytvorený elektromagnetický moment, ktorý spôsobuje rotáciu samotného rotora a pohon mechanizmus.
Jadro statora má tvar dutého valca (obr. 6.2). Na zníženie energetických strát z vírivých prúdov sa prijíma zo samostatných elektrických oceľových plechov, ktoré sú navzájom izolované lakovým filmom.
Na vnútornom povrchu jadra sú drážky, v ktorých je uložené statorové vinutie. Jadro sa vtlačí do telesa (rámu) 7 (obr. 6.1), vyrobeného z liatiny alebo zliatiny hliníka.
V motore s jedným párom pólov je vinutie statora vyrobené z troch identických cievok, nazývaných fázy. Každá fáza vinutia je umiestnená v protiľahlých drážkach jadra statora, fázy vinutia sú posunuté v priestore voči sebe o uhol a vzájomne prepojené podľa špeciálnych pravidiel. Začiatky a konce fáz statorového vinutia sú pripojené na výstupné svorky svorkovnice 4 (obr. 6.1), čo umožňuje pripojenie fáz statorového vinutia s hviezdou alebo trojuholníkom. V tomto ohľade môže byť asynchrónny motor pripojený k sieti s lineárnym napätím rovným Uph vinutia (statorové vinutie je spojené trojuholníkom) alebo  Uf (vinutie je spojené hviezdou).
Uf (vinutie je spojené hviezdou).
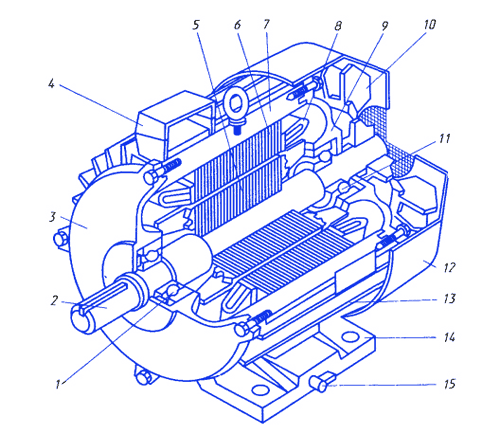
Obr. 6.1. - Celkový pohľad na asynchrónny motor:
ložiská - 1 a 11, hriadeľ - 2, ložiskové štíty - 3 a 9, svorkovnica - 4, rotor - 5, stator - 6, lôžko - 7,
čelné časti vinutia statorovej fázy - 8, ventilátor - 10, viečko - 12, rebrá - 13, pätky - 14, uzemnenie skrutky - 15

P 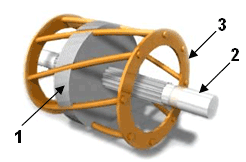 isa. 6.2.
isa. 6.2.
Rotor 5 (obr. 6.1) sa skladá z jadra a skratového vinutia. Jadro 1 rotora (obr. 6.3) je zostavené z elektrických oceľových plechov a namontované na hriadeľ 2 (obr. 6.3) motora, listy sú izolované od seba v mierke, vytvorenej počas procesu valcovania. Listy rotora majú drážky, v ktorých je umiestnené vinutie.
Motory so skráteným vinutím na rotore majú rad konštrukcií vo forme drážok na rotore. Tvar štrbín rotora sa volí v závislosti od požiadaviek na štartovacie charakteristiky motora. Najviac racionálne pre štrbiny rotora s klietkou veveričky sú lichobežníkové oválne drážky. Existujú aj ďalšie modifikácie štrbín rotora (profil fľaše a lichobežníka).
Skratované vinutie rotora 3 (obr. 6.3) je zvyčajne vyrobené z liatej hliníkovej zliatiny. V procese odlievania sú vytvorené ako jadrá (vodiče) vinutí, ktoré sú umiestnené v drážkach, tak aj skratové kruhy, ktoré sú umiestnené mimo jadra rotora. Prstene môžu byť vybavené vetracími lopatkami na zlepšenie vetrania motora a odvádzania tepla z vinutia rotora. Nedostatok izolácie rotorového vinutia poskytuje dobrý odvod tepla z vinutia do jadra. Takýto krátko vinutý rotorový vinutie, nazývaný "klietka veveričky".
Hriadeľ sa otáča v ložiskách uložených v bočných krytoch 3 a 9 (obr. 6.1), nazývaných ložiská. Kryty ložísk sú pripevnené k rámu 7 (obr. 6.1) pomocou skrutiek.
Medzi rotorom a statorom asynchrónneho motora je vzduchová medzera. Pri výbere vzduchovej medzery sa vyskytujú protichodné trendy. Minimálna (zvolená z mechanických dôvodov) vzduchová medzera vedie k poklesu prúdu bez zaťaženia motora a zvýšeniu účinníka. Pri malej vzduchovej medzere sa však dodatočné straty v povrchovej vrstve statora a rotora, ďalšie momenty a hluk motora zvyšujú. V dôsledku rastu strát sa účinnosť znižuje. Preto v modernej sérii asynchrónnych motorov je vzduchová medzera zvolená o niečo väčšia ako je požadovaná z mechanických dôvodov (takže rotor sa počas prevádzky nedotýka statora).
Princíp činnosti asynchrónneho motora je založený na dvoch javoch: vytvorení rotujúceho magnetického poľa prúdmi vinutia statora a účinku tohto poľa na prúdy indukované v skratových cievkach vinutia rotora.
Ak niekto nevie, ako žiarivky fungujú, potom dôležitým bodom je elektrický prúd, ale nie v ...
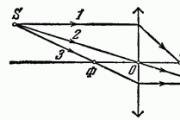
Keď je svetelný bod na bočnej optickej osi objektívu, objektív vytvára svoj obraz na rovnakej osi.

V piatok 8. apríla 1994 o 8.45 hod. Miestneho času bolo policajné oddelenie v Seattli ...
Mnohí rádioamatéri sú motoristi a radi relaxujú s priateľmi v prírode a z výhod civilizácie ...
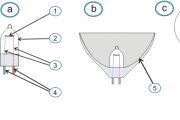
Princíp činnosti všetkých klasických žiaroviek je podobný. Elektrický prúd prechádzajúci cez vlákno, obyčajne stočený do špirály, ...

Uzemnenie a nulovanie: Aký je rozdiel? Akýkoľvek elektrický systém je postavený na trojfázovej sieťovej sieti alebo ...

Riadiaca jednotka asynchrónneho motora je neregulovateľná (BNN). Riadiaca jednotka asynchrónna ...

Čo je kondenzátor? Ako to funguje? Kto vynašiel prvý kondenzátor na svete? - všetky tieto otázky, ktoré sme dnes ...
Prezentácia na tému "Optické prístroje" A čo je to optické prístroje Optické prístroje sú zariadenia ...

Počkajte, nie theca, poďme sa trochu porozprávať, počkajte, neponáhľajte sa, neveďte na koni, sme s vami tento večer v byte ...
Gazprom má najbohatšie zásoby zemného plynu na svete. Jeho podiel na svetových rezervách je ...
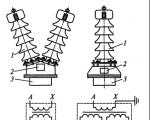
V závislosti od účelu môžu byť použité transformátory napätia s rôznymi schémami pripojenia ...

Na juhu Ruska venujte pozornosť DGTU, ktorej fakulty každoročne produkujú veľké množstvo ...
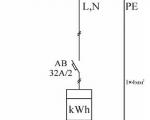
Špecialisti spoločnosti "MontazhElektro" rozvíjať výkonné a vyrovnanie jedno-riadkové diagramy ...
Pre tenké šošovky by bolo pekné mať vzorec, ktorý bude spájať všetky jeho základné parametre. Ohnisková vzdialenosť ...

Ako určiť počet závitov sekundárneho vinutia? Pre výpočet počtu otáčok sekundárneho vinutia je potrebné ...