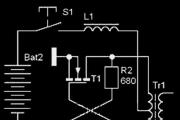
इलेक्ट्रॉनिक गिट्टी और उसका सर्किट कैसे काम करता है
यदि कोई नहीं जानता कि फ्लोरोसेंट लैंप कैसे काम करता है, तो यहां महत्वपूर्ण बिंदु एक विद्युत प्रवाह है, लेकिन इसमें नहीं ...
दो प्रकार के तीन-चरण इलेक्ट्रिक मोटर्स हैं, जो घूर्णन भाग (रोटर) के डिजाइन में भिन्न हैं। इंजन के चलते हुए हिस्से को कभी-कभी लंगर कहा जाता है, लेकिन इसे रोटर कहना अधिक सही और अधिक पेशेवर होगा।
अतुल्यकालिक इलेक्ट्रिक मोटर्स।
यदि इलेक्ट्रिक मोटर के रोटर में अपनी स्वयं की विंडिंग नहीं होती है (ब्रश के माध्यम से रोटर पर वोल्टेज लागू नहीं होता है), तो यह एक गिलहरी-पिंजरे रोटर के साथ एक मोटर है, या मैं इसे एक अतुल्यकालिक मोटर कैसे कहता हूं। यह अतुल्यकालिक है क्योंकि इस इंजन में स्टेटर वाइंडिंग्स में चुंबकीय प्रेरण के परिवर्तन की दर रोटर के रोटेशन की गति के साथ मेल नहीं खाती (सिंक्रोनस नहीं) है। डिजाइन की सादगी के कारण ऐसी तीन-चरण मोटरें अधिक हैं।
एक चरण रोटर के साथ इलेक्ट्रिक मोटर।
एक तीन-चरण इलेक्ट्रिक मोटर, जिसमें रोटर की अपनी वाइंडिंग होती है, और ब्रश के माध्यम से इन वाइंडिंग पर वोल्टेज लगाया जाता है, को चरण-रोटर मोटर कहा जाता है। ऐसी इलेक्ट्रिक मोटर का जटिल डिज़ाइन उचित है जब रोटेशन की गति को विनियमित करना आवश्यक हो और एक शक्तिशाली मोटर की शुरुआती धाराओं को कम करना आवश्यक हो।
सभी तीन-चरण इलेक्ट्रिक मोटर्स के स्टेटर (निश्चित भाग) को संरचना में समान बनाया गया है। संरचनात्मक रूप से, तांबे की घुमावदार तारों के घुमाव स्टेटर चुंबकीय कोर में एम्बेडेड होते हैं। अलग-अलग वाइंडिंग की संख्या 3, 6, 9 12. तीन वाइंडिंग से हो सकती है, मोटर, जब नेटवर्क से जुड़ा होता है, 3000 आरपीएम की गति से घूमेगा। मिनटों में छह, नौ, बारह विंडिंग के साथ, इलेक्ट्रिक मोटर्स क्रमशः 1500, 1000, 750 आरपीएम की गति से घूमेंगे। प्रति मिनट, लेकिन 3000 आरपीएम पर इंजन की तुलना में अधिक टोक़ के साथ। मिनटों में
व्यक्तिगत मोटर्स के लिए घूर्णी गति के सभी मूल्यों को केवल तभी प्राप्त किया जाता है जब 380 वी के वोल्टेज के साथ तीन-चरण नेटवर्क से जुड़ा होता है, जब स्टेटर वाइंडिंग्स स्टार सर्किट के अनुसार जुड़े होते हैं।
संचालन का सिद्धांत।
यह सब चुंबकीय प्रेरण के बारे में है, जो विद्युत चुंबक और ट्रांसफार्मर में भी उपयोगी काम करता है। चुंबकीय प्रेरण के कारण, धातु की वस्तुओं में शामिल विद्युत चुंबक आकर्षित होते हैं। ट्रांसफार्मर में एक ही शक्ति के कारण, बिजली एक कॉइल से दूसरे में प्रेषित होती है, जो एक दूसरे से पृथक होती हैं।
इलेक्ट्रिक मोटर्स में, चुंबकीय प्रेरण तब होता है जब स्टेटर और रोटर के बीच संपर्क रहित कनेक्शन बनाया जाता है। अधिक विस्तार से, यह निम्नानुसार होता है। विद्युत मोटर के स्टेटर वाइंडिंग्स से गुजरने वाला करंट एक चुंबकीय क्षेत्र बनाता है। यह क्षेत्र स्थायी नहीं है, जैसा कि एक विद्युत चुंबक या ट्रांसफार्मर में होता है। और जल्दी से वैकल्पिक रूप से इसकी ध्रुवीयता को बदल देता है, और प्रारंभिक अवस्था में लौटता है जब यह स्टेटर वाइंडिंग के साथ एक क्रांति करता है।
और इस विद्युत चुम्बकीय क्षेत्र का लाभ यह है कि, प्रेरण के बल के कारण, यह रोटर की सतह पर एक अलग खंड चुम्बकित करता है, जो इंजन के भौतिक अक्ष के समानांतर है। और फिर, वैकल्पिक चुंबकीय क्षेत्र इसे साथ खींचता है, इस प्रकार स्टेटर को अपनी धुरी के चारों ओर घूमने के लिए मजबूर करता है।
ऑपरेशन का आपातकालीन मोड (चरण विराम पर)।
इंजन का कोई भी तार टूटना एक आपातकालीन स्थिति है जो इंजन और स्वयं से जुड़े उपकरणों दोनों को नुकसान पहुंचाती है। एक चरण की विफलता के परिणामों की गंभीरता इस बात पर निर्भर करती है कि मोटर वाइंडिंग किस सर्किट से जुड़े हैं।
"स्टार" योजना के अनुसार मोटर को कनेक्ट करते समय।
यदि इंजन काम करता है, तो रोटर उसी टोक़ के साथ स्पिन करना जारी रखेगा, लेकिन इसकी रोटेशन की गति कम हो जाएगी। इसी समय, शेष विंडिंग्स में जो वोल्टेज से जुड़े रहते हैं, एक overestimated करंट प्रवाहित होगा, इन दो वाइंडिंग्स में परिमाण में समान।
यदि आप चरण विराम के दौरान लंबे समय तक चलने वाले इंजन को छोड़ देते हैं, तो दो जुड़े हुए विंडिंग समान रूप से गर्म हो जाएंगे। अंत में, इंजन सबसे अधिक भरा हुआ नहीं है, और अच्छी तरह से बनाया गया है, अपेक्षाकृत बरकरार रह सकता है। लेकिन घुमावदार तारों का इन्सुलेशन प्रतिरोध कम हो जाएगा, क्योंकि वे गर्म होने पर बाधित हो जाते हैं। और इलेक्ट्रिक मोटर अब ऐसी बार-बार होने वाली पीड़ाओं को सहन नहीं करेगी।
"त्रिकोण" के तहत मोटर को कनेक्ट करते समय।
यदि इंजन काम करता है, तो रोटर स्पिन करना जारी रखेगा, जैसा कि पिछले मामले में है। लेकिन एक ही समय में, शेष जुड़े विंडिंग्स में से एक में, सामान्य ऑपरेशन की तुलना में वर्तमान में 1.73 गुना अधिक प्रवाह होगा।
इसलिए, यदि आप चरण के टूटने पर लंबे समय तक चलने वाले इंजन को छोड़ देते हैं, तो दो जुड़े विंडिंग्स में से एक बहुत गर्म हो जाएगा। और इंजन ही, अंततः धूम्रपान और बंद करने के लिए। चूंकि, मोटर के अंदर घुमावदार तारों पर तामचीनी इन्सुलेशन नष्ट हो जाता है, और एक शॉर्ट सर्किट होगा।
यदि आप डिस्कनेक्ट किए गए चरण के साथ मोटर शुरू करने की कोशिश करते हैं, तो यह या तो बिल्कुल भी घूमना शुरू नहीं करता है, या बहुत धीरे-धीरे गति उठाएगा। और इससे कोई फर्क नहीं पड़ता कि इंजन किस योजना से जुड़ा है। इस मामले में, इंजन चुंबकीय सर्किट के हिस्से से गुजरने वाले अत्यधिक चुंबकीय प्रवाह के कारण इंजन बहुत शोर होगा।
यदि दो चरण टूट जाते हैं, तो काम करने वाली मोटर बंद हो जाती है, इंजन नहीं चल रहा है, और कोई हानिकारक परिणाम नहीं होंगे।
एकल-चरण नेटवर्क से कनेक्शन।
बहुत बार वॉशिंग मशीन, पंखे, विभिन्न वुडवर्किंग मशीन, पानी के पंप, पीसने की मशीनों पर सिंगल-फेज के बजाय तीन-चरण मोटर का उपयोग करने की आवश्यकता होती है।
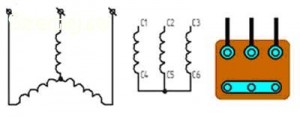
सबसे अधिक बार, इलेक्ट्रिक मोटर्स "स्टार" योजना के अनुसार जुड़े होते हैं, क्योंकि इस मामले में उन्हें तीन-चरण नेटवर्क में उपयोग किया जा सकता है, अर्थात 380 वी के अधिकतम ऑपरेटिंग वोल्टेज पर। लेकिन जब 220V के कम वोल्टेज पर एकल-चरण नेटवर्क से जुड़ा होता है, तो ऐसी योजना बिल्कुल भी उपयुक्त नहीं है। क्योंकि एकल-चरण नेटवर्क के लिए "स्टार" योजना के अनुसार जुड़ा हुआ इलेक्ट्रिक मोटर इसकी आधी शक्ति खो देगा।
विशेष रूप से, "स्टार" योजना के अनुसार कनेक्शन तब होता है जब तीन विंडिंग के छोर एक साथ मुड़ जाते हैं, और इन वाइंडिंग्स की शुरुआत मुख्य से जुड़ी होती है।
यह है कि तारों को टर्मिनल ब्लॉक से कैसे जोड़ा जाता है और इसलिए "स्टार" योजना के अनुसार कनेक्ट होने पर कूदने वालों को इलेक्ट्रिक मोटर के जंक्शन बॉक्स (बॉर्न) में रखा जाना चाहिए।
"त्रिभुज" के अनुसार।
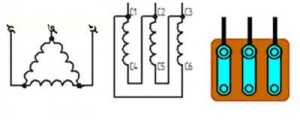
यदि आपको 220V के वोल्टेज के साथ तीन-चरण इलेक्ट्रिक मोटर को एकल-चरण नेटवर्क से कनेक्ट करने की आवश्यकता है, तो "त्रिकोण" योजना के अनुसार विंडिंग्स को इकट्ठा करना वांछनीय है। इस तथ्य से, कि समावेशन की ऐसी योजना के साथ, इंजन केवल रेटेड शक्ति का 30% खो देगा। और इसके अलावा, रोटेशन की गति बिल्कुल कम नहीं होती है।
सामान्य तौर पर, डेल्टा कनेक्शन करने के लिए, आपको एक विंडिंग के अंत को दूसरे की शुरुआत से कनेक्ट करने की आवश्यकता होती है, और इसलिए श्रृंखला में सभी वाइंडिंग को कनेक्ट करें, और उनके कनेक्शन बिंदुओं को मुख्य से कनेक्ट करें।
तो, टर्मिनल ब्लॉक के तारों को कनेक्ट किया जाना चाहिए, और इसलिए "त्रिभुज" स्कीम में कनेक्ट होने पर जंपर्स मोटर टर्मिनल में स्थित होते हैं।
चौकस रहो! 220 / 127V के ऑपरेटिंग वोल्टेज के लिए डिज़ाइन किए गए तीन चरण इलेक्ट्रिक मोटर्स हैं। और अगर आप इस तरह की मोटर को एक "डेल्टा" सर्किट में, जो 127V का कम वोल्टेज है, और फिर 220V के एक मानक वोल्टेज के एकल-चरण नेटवर्क में प्लग करते हैं, तो मोटर जल्दी से जल जाएगी।
एकल-चरण नेटवर्क में काम करने के लिए तीन-चरण इलेक्ट्रिक मोटर के लिए, चरण-शिफ्टर अभी भी आवश्यक होगा, या, जैसा कि इसे भी कहा जाता है, एक कार्यशील संधारित्र।
अंततः, आपको चरण-शिफ्टिंग कैपेसिटर के सिरों को टर्मिनल में दो टर्मिनलों से जोड़ना होगा, और नेटवर्क से दो तारों को इस तरह फेंकना होगा: संधारित्र के किसी भी आउटपुट के लिए; वहन में मुक्त टर्मिनल के लिए दूसरा।

यह तथ्य कि अतुल्यकालिक इंजन आज सभी उद्योगों और कृषि में उपयोग किए जाते हैं, रूसी इंजीनियर एमओ को झुकना आवश्यक है। Dolivo-Dobrovolsky। यह वह था जिसने 1889 में (या 8 मार्च को) तीन चरण की अतुल्यकालिक मोटर का आविष्कार किया था जो विद्युत ऊर्जा को यांत्रिक ऊर्जा (रोटेशन) में परिवर्तित करता है। यह, वास्तव में, प्रौद्योगिकी में एक सफलता और एक नए युग की शुरुआत थी।
सबसे महत्वपूर्ण बात यह है कि इस प्रकार के इलेक्ट्रिक मोटर्स बहुत विश्वसनीय निकले, उनका उत्पादन काफी सरल है, जो उत्पाद की कम लागत को प्रभावित करता है। प्लस एक सरल डिजाइन जो आसानी से न केवल उत्पादन के लिए, बल्कि मरम्मत के लिए भी उधार देता है। यदि हम आँकड़ों को देखें, तो हम यह निष्कर्ष निकाल सकते हैं कि अतुल्यकालिक मोटर्स दुनिया में सबसे अधिक उत्पादित हैं। उनके पास 90% तक समस्या है। इसलिए नंबर अपने लिए बोलते हैं।
लेकिन इन उपकरणों को अतुल्यकालिक क्यों कहा जाता है? तथ्य यह है कि स्टेटर के चुंबकीय क्षेत्र के रोटेशन की आवृत्ति हमेशा रोटर के रोटेशन से अधिक होती है। वैसे, इस प्रकार के इलेक्ट्रिक मोटर्स के लिए, ऑपरेशन का सिद्धांत चुंबकीय क्षेत्र के रोटेशन पर सटीक रूप से आधारित है।
यह समझने के लिए कि एसिंक्रोनस तीन-चरण इलेक्ट्रिक मोटर्स कैसे काम करते हैं, एक साधारण प्रयोग करना आवश्यक है। ऐसा करने के लिए, आपको एक पारंपरिक घोड़े की नाल के आकार के चुंबक और एक तांबे की छड़ की आवश्यकता होती है। इस मामले में, चुंबक को संभाल के लिए अच्छी तरह से तय किया जाना चाहिए, जिसकी मदद से इसे अपनी धुरी के चारों ओर एक स्थान पर घुमाया जा सकता है। तांबे की छड़ को बीयरिंगों में तय किया जाता है और घोड़े की नाल चुंबक के सिरों (ध्रुवों) के बीच अंतरिक्ष में स्थापित किया जाता है। यही है, रॉड एक चुंबक के अंदर, या बल्कि, रोटेशन के अपने विमान के अंदर दिखाई देता है।
अब आपको केवल हैंडल द्वारा चुंबकीय डिवाइस को घुमाने की आवश्यकता है। बेहतर दक्षिणावर्त। चूंकि ध्रुवों के बीच एक चुंबकीय क्षेत्र है, इसलिए यह भी घूमेगा। इसी समय, क्षेत्र अपनी बिजली लाइनों के साथ एक तांबे की छड़-सिलेंडर को पार या काट देगा। और यहाँ विद्युत चुम्बकीय प्रेरण का कानून शामिल है। यानी तांबे की छड़ के अंदर एड़ी की धाराएं बनने लगेंगी। वे, बदले में, अपने स्वयं के चुंबकीय क्षेत्र का निर्माण शुरू करेंगे, जो मुख्य चुंबकीय क्षेत्र के साथ बातचीत करेगा।
इस मामले में, छड़ चुंबक के समान दिशा में घूमना शुरू कर देगा। और यहां एक क्षण है, जो विद्युत मोटर के संचालन के सिद्धांत में भी निहित है। इसका उल्लेख पहले ही किया जा चुका है। यदि छड़ की घूर्णी गति चुंबक के समान होती है, तो बल की उनकी रेखाएं प्रतिच्छेद नहीं करेंगी। यही है, रोटेशन एड़ी धाराओं की अनुपस्थिति के कारण नहीं होगा।
और बारीकियों की एक जोड़ी:

चेतावनी! चुंबकीय क्षेत्रों की घूर्णी गति में अंतर बहुत बड़ा नहीं है। इस मान को स्लिप कहा जाता है।
वैसे, पर्ची की मात्रा निर्धारित करना आसान है, इसके लिए आपको सूत्र का उपयोग करने की आवश्यकता है:
एस = एन-एन 1 / एन, जहां
बेशक, ऊपर दिखाए गए डिवाइस को एक इलेक्ट्रिक मोटर नहीं कहा जा सकता है, क्योंकि उदाहरण के लिए, एक चुंबक का उपयोग किया गया था, जो बस मोटर में नहीं है। इसलिए, ऐसी संरचना बनाना आवश्यक है जिसमें विद्युत प्रवाह इस बहुत ही चुंबकीय क्षेत्र का निर्माण करेगा। इसके अलावा, इसे घुमाना भी चाहिए। रूसी वैज्ञानिक तीन-चरण की बारी के वर्तमान की मदद से ऐसा करने में सक्षम था।
इसलिए, तीन-चरण अतुल्यकालिक मोटर के डिजाइन में, तीन वाइंडिंग स्थापित किए जाते हैं, जो 120 an के कोण पर एक दूसरे के सापेक्ष स्थित होते हैं। प्रत्येक घुमावदार एक तीन-चरण एसी चरण सर्किट से जुड़ा हुआ है। स्टेटर के लिए विंडिंग तय की जाती है, जो एक खोखले केस के रूप में एक धातु कोर है। वे कोर के ध्रुवों पर तय होते हैं।
चेतावनी! प्रत्येक घुमावदार में दो ढीले छोर होते हैं। एक नेटवर्क चरण से जुड़ता है, दूसरा अन्य दो विंडिंग के दूसरे छोर पर, यानी एक सर्किट में।
खोखले कोर के अंदर, बीयरिंगों पर एक रोटर तय किया गया है। वास्तव में, यह वही रॉड-सिलेंडर है। नीचे घुमावदार के कनेक्शन और रोटर के स्थान का एक आरेख है।

जैसे ही बिजली का करंट वाइंडिंग पर बहना शुरू होता है, एक घूर्णन चुंबकीय क्षेत्र बनता है, जो रोटर पर कार्य करता है, जिससे यह भी घूमता है।
तीन-चरण अतुल्यकालिक मोटर के सिद्धांत को समझने के लिए, इसके काम की अनुसूची पर विचार करना आवश्यक है। इस कार्य को सुविधाजनक बनाने के लिए, हम नीचे दी गई योजना पर विचार करने का प्रस्ताव करते हैं।
ध्रुवीयता में परिवर्तन चुंबकीय प्रवाह का एक रोटेशन बनाता है, जो बदले में इसके साथ रोटर को ले जाता है। उत्तरार्द्ध घूमना शुरू कर देता है। जैसा कि ऊपर उल्लेख किया गया है, घूर्णी ऊर्जा (यांत्रिक) विद्युत ऊर्जा से प्राप्त की जाती है।
चेतावनी! यदि आप दूसरी और तीसरी वाइंडिंग स्वैप करते हैं, तो इलेक्ट्रिक मोटर का रोटेशन विपरीत दिशा में शुरू होगा। बेशक, वाइंडिंग्स खुद को फिर से व्यवस्थित नहीं किया जाता है, लेकिन नेटवर्क के विभिन्न चरणों के संबंध में बस एक बदलाव है।
हमने स्टेटर पर तीन वाइंडिंग के साथ एक अतुल्यकालिक तीन-चरण इलेक्ट्रिक मोटर के डिजाइन पर विचार किया है, जो एक द्विध्रुवीय चुंबकीय क्षेत्र सर्किट का उपयोग करता है। क्रांतियों की संख्या प्रति मिनट विद्युत प्रवाह के दोलनों की संख्या के बराबर है। यदि एक एसी नेटवर्क में प्रति सेकंड दोलनों की संख्या 50 हर्ट्ज है, तो एक मिनट में यह मान 3000 (आरपीएम) होगा।

लेकिन स्टेटर में तीन वाइंडिंग रखना संभव नहीं है। उदाहरण के लिए, आप छह या दस सेट कर सकते हैं। इस स्थिति में, चुंबकीय क्षेत्र क्रमशः चार-ध्रुव और छह-ध्रुव बन जाएगा। इसी समय, रोटर रोटेशन की गति भी बदल जाएगी। पहले मामले में, यह बराबर होगा: (50X60) / 2 = 1500 आर / मिनट। दूसरे में: (50X60) / 3 = 1000 आरपीएम।
हमने पहले ही ऊपर उल्लेख किया है कि चुंबकीय क्षेत्र के रोटेशन से रोटर के रोटेशन में एक निश्चित अंतराल है। सच है, यह मूल्य नगण्य है। उदाहरण के लिए, निष्क्रिय मोड में, यह संकेतक केवल 3% होगा, जिसमें सक्रिय भार 5-7% होगा। यहां तक कि 7% एक छोटा मूल्य है, जो एक अतुल्यकालिक मोटर के लाभों में से एक है।
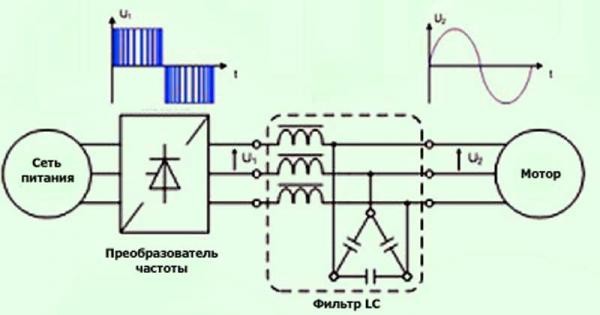
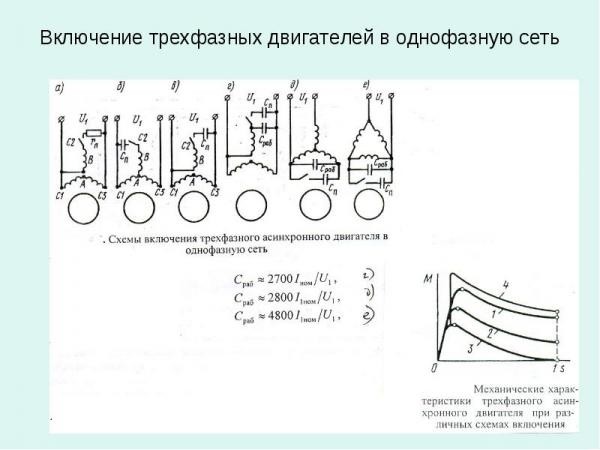
दुर्भाग्य से, सभी निजी घरों में तीन-चरण वोल्टेज नहीं है। इसलिए, एक एकल-चरण नेटवर्क के लिए तीन-चरण अतुल्यकालिक मोटर का कनेक्शन एक निश्चित क्षमता के कैपेसिटर के माध्यम से किया जाता है। आमतौर पर गणना के अनुसार किया जाता है: प्रति 1 किलोवाट बिजली 70 μF क्षमता। लेकिन इस मामले में एक और समस्या है - रोटर के रोटेशन की गति को विनियमित करने में असमर्थता। इसलिए, विशेषज्ञ मोटर गति नियंत्रक को तीन-चरण अतुल्यकालिक मोटर्स से कनेक्ट करने की सलाह देते हैं।
ये उपकरण अब विशेष दुकानों में बेचे जाते हैं, लेकिन उन्हें अपने हाथों से बनाने में कोई समस्या नहीं है।
रोटर डिजाइन द्वारा, अतुल्यकालिक इलेक्ट्रिक मोटर्स को दो समूहों में विभाजित किया गया है:
पहला विकल्प उच्च शक्ति वाले इंजन हैं जिनके लिए एक बड़े शुरुआती टोक़ की आवश्यकता होती है। उनके रोटर माउंटेड स्लिप रिंग्स का डिजाइन। दूसरा विकल्प डिजाइन है, जिसके खांचे में तांबे की छड़ें रखी हैं। ये विशिष्ट इलेक्ट्रिक मोटर हैं, सरल और सस्ते। लेकिन उनके पास कुछ कमियां हैं: एक बड़ी प्रारंभिक धारा और रोटेशन की शुरुआत में एक कमजोर बल।

इलेक्ट्रिक मोटर्स चुनते समय आमतौर पर क्या ध्यान देने की आवश्यकता है? तकनीकी विशेषताओं, सिद्धांत रूप में, थोड़ा। यह kW में मापी गई शक्ति है, आरपीएम में रोटर की घूर्णी गति। अन्य सभी विशिष्टताओं को चुनना इतना महत्वपूर्ण नहीं है। हालांकि, उदाहरण के लिए, उत्पाद का द्रव्यमान स्टैंड या माउंटिंग फ्रेम पर लोड की गणना करने में मदद कर सकता है।
तो, अतुल्यकालिक इलेक्ट्रिक मोटर्स - विद्युत उपकरण माना जाता था, जो अक्सर घरेलू जरूरतों के लिए निजी घरों में उपयोग किया जाता है। डिवाइस और मोटर के संचालन का सिद्धांत जिसे अब आप समझते हैं, लेकिन इंजन को एकल-चरण नेटवर्क से कैसे कनेक्ट किया जाए, एक अन्य लेख में पढ़ें।
संबंधित पोस्ट: 
उत्पादन में आसानी, कम लागत, काम में विश्वसनीयता इस तथ्य के कारण बनी कि एसिंक्रोनस मोटर (BP) सबसे आम इलेक्ट्रिक मोटर बन गई है। वे तीन-चरण इलेक्ट्रिक नेटवर्क से, और एकल-चरण दोनों से काम कर सकते हैं।
तीन-चरण अतुल्यकालिक मोटर्स का उपयोग किया जाता है:
पंप, पंखे, कंप्रेशर्स, ब्लोअर, स्मोक एग्जॉस्ट, कन्वेक्टर, ऑटोमैटिक लाइन, फोर्जिंग और स्टैम्पिंग मशीन आदि की अनियोजित इलेक्ट्रिक ड्राइव में।
मेटल-कटिंग मशीनों, मैनिपुलेटर्स, रोबोट्स, लिफ्टिंग मैकेनिज्म, अलग-अलग उत्पादकता वाले सामान्य औद्योगिक तंत्र आदि की समायोज्य इलेक्ट्रिक ड्राइव में।
इंडक्शन मोटर के रोटर वाइंडिंग के प्रदर्शन की विधि के आधार पर, बाद को दो समूहों में विभाजित किया जाता है: रोटर पर एक शॉर्ट-सर्कुलेटिंग वाइंडिंग के साथ मोटर्स और रोटर पर एक चरण वाइंडिंग के साथ मोटर्स।
रोटर पर एक शॉर्ट-सर्कुलेटिंग घुमावदार के साथ मोटर्स उत्पादन के लिए सस्ता है, संचालन में विश्वसनीय है, एक कठोर यांत्रिक विशेषता है, अर्थात, जब लोड शून्य से नाममात्र में बदल जाता है, तो मशीन की गति केवल 2-4% कम हो जाती है। ऐसे इंजनों के नुकसानों में एक विस्तृत श्रृंखला पर घूर्णी गति को सुचारू रूप से समायोजित करने में कठिनाई, अपेक्षाकृत छोटे शुरुआती टोक़ के साथ-साथ बड़े शुरुआती धाराओं, नाममात्र की तुलना में 5-7 गुना अधिक की कठिनाई शामिल है।
इन कमियों में एक चरण रोटर के साथ इंजन नहीं होते हैं, लेकिन रोटर का डिज़ाइन बहुत अधिक जटिल होता है, जिससे इंजन की लागत में वृद्धि होती है। इसलिए, उनका उपयोग गंभीर शुरुआती स्थितियों के मामले में किया जाता है और, यदि आवश्यक हो, तो विस्तृत श्रृंखला में घूर्णी गति का सहज नियंत्रण। प्रयोगशाला के काम में, एक गिलहरी-पिंजरे रोटर के साथ एक इंजन माना जाता है।
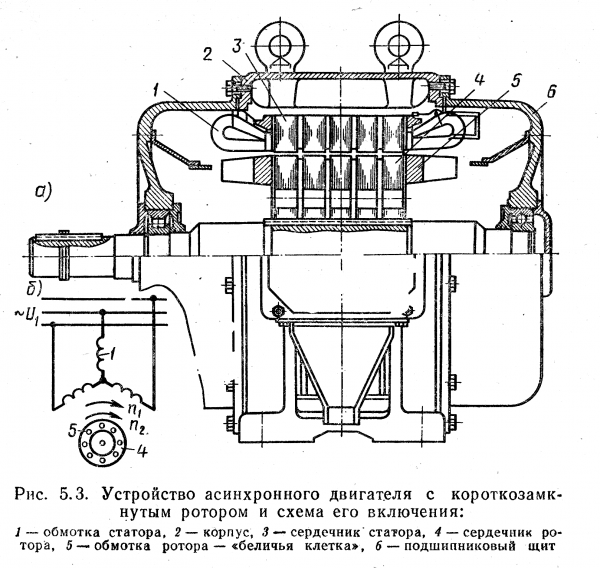
तीन-चरण अतुल्यकालिक मोटर में एक स्थिर हिस्सा होता है - स्टेटर 6 (छवि। 6.1), जिस पर एक घुमावदार चुंबकीय क्षेत्र बनाने के लिए एक घुमावदार स्थित होता है, और एक चलने योग्य भाग - रोटर 5 (छवि। 6.1), जिसमें एक विद्युत चुम्बकीय क्षण बनाया जाता है, जो रोटर को घुमाने के लिए और actuator का कारण बनता है। तंत्र।
स्टेटर कोर में एक खोखले सिलेंडर का आकार होता है (छवि 6.2)। एडी धाराओं से ऊर्जा के नुकसान को कम करने के लिए, इसे वार्निश फिल्म के साथ एक दूसरे से पृथक अलग विद्युत स्टील शीट से भर्ती किया जाता है।
कोर की आंतरिक सतह पर खांचे होते हैं जिसमें स्टेटर वाइंडिंग रखी जाती है। कोर को कास्ट आयरन या एल्यूमीनियम मिश्र धातु से निर्मित शरीर (फ्रेम) 7 (छवि 6.1) में दबाया जाता है।
एक जोड़ी डंडे वाली मोटर में, स्टेटर वाइंडिंग तीन समान कॉइल से बना होता है, जिसे चरण कहा जाता है। वाइंडिंग के प्रत्येक चरण को स्टेटर कोर के विपरीत खांचे में रखा जाता है, वाइंडिंग के चरणों को एक कोण से एक दूसरे के सापेक्ष अंतरिक्ष में स्थानांतरित किया जाता है और विशेष नियमों के अनुसार परस्पर जुड़ा होता है। स्टेटर वाइंडिंग के चरणों की शुरुआत और अंत टर्मिनल बॉक्स 4 (छवि 6.1) के आउटपुट टर्मिनलों से जुड़े होते हैं, जो आपको स्टेटर वाइंडिंग के चरणों को एक स्टार या एक त्रिकोण के साथ जोड़ने की अनुमति देता है। इस संबंध में, एसिंक्रोनस मोटर को नेटवर्क से एक रैखिक वोल्टेज के साथ जोड़ा जा सकता है जो घुमावदार के यूएफ के बराबर है (स्टेटर वाइंडिंग एक त्रिकोण से जुड़ा है) या  यूएफ (घुमावदार एक स्टार द्वारा जुड़ा हुआ है)।
यूएफ (घुमावदार एक स्टार द्वारा जुड़ा हुआ है)।
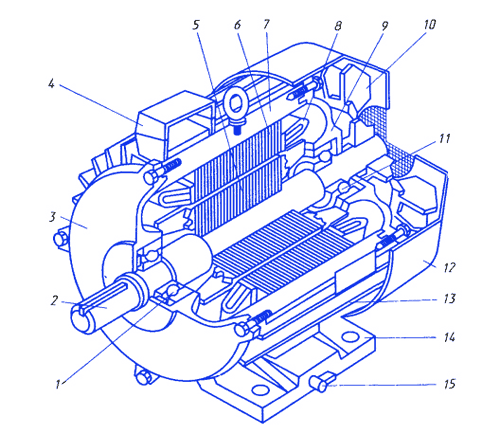
अंजीर। 6.1। - अतुल्यकालिक मोटर का सामान्य दृश्य:
बीयरिंग - 1 और 11, शाफ्ट - 2, असर ढाल - 3 और 9, टर्मिनल बॉक्स - 4, रोटर - 5, स्टेटर - 6, बिस्तर - 7
स्टेटर चरण घुमावदार के ललाट भागों - 8, प्रशंसक - 10, टोपी - 12, पसलियों - 13, पैर - 14, बोल्ट जमीन - 15

पी 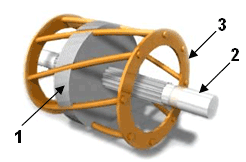 ईसा। 6.2।
ईसा। 6.2।
रोटर 5 (अंजीर। 6.1) में एक कोर और एक छोटी-घुमावदार घुमावदार होती है। रोटर कोर 1 (छवि 6.3) को विद्युत स्टील की चादरों से इकट्ठा किया जाता है और इंजन के शाफ्ट 2 (छवि 6.3) पर मुहिम शुरू की जाती है, चादरें रोलिंग प्रक्रिया के दौरान गठित पैमाने से एक दूसरे से अलग होती हैं। रोटर शीट में खांचे होते हैं जिसमें घुमावदार रखा जाता है।
रोटर पर शॉर्ट सर्किट वाली घुमावदार मोटरों के साथ रोटर पर खांचे के रूप में कई डिजाइन होते हैं। इंजन की शुरुआती विशेषताओं के लिए आवश्यकताओं के आधार पर रोटर स्लॉट्स के आकार का चयन किया जाता है। एक गिलहरी पिंजरे के साथ रोटर के स्लॉट्स के लिए सबसे तर्कसंगत ट्रेपेज़ॉइडल अंडाकार खांचे हैं। रोटर स्लॉट्स (बोतल और ट्रेपोजॉइडल प्रोफाइल) के अन्य संशोधन हैं।
रोटर 3 (छवि 6.3) की शॉर्ट-सर्कुलेटिंग वाइंडिंग आमतौर पर कास्ट एल्यूमीनियम मिश्र धातु से बनी होती है। ढलाई की प्रक्रिया में, घुमाव के दोनों कोर (कंडक्टर), जो खांचे में स्थित होते हैं, और शॉर्ट सर्किटिंग रिंग, जो रोटर कोर के बाहर स्थित होते हैं, बनते हैं। इंजन वेंटिलेशन में सुधार और रोटर घुमावदार से गर्मी लंपटता के लिए वेंटिलेशन ब्लेड के साथ रिंग्स प्रदान किए जा सकते हैं। रोटर वाइंडिंग के इन्सुलेशन की कमी से विंडिंग से कोर तक अच्छी गर्मी हटाने की सुविधा मिलती है। इस तरह के एक शॉर्ट-सर्कुलेटेड रोटर वाइंडिंग को "गिलहरी पिंजरे" कहा जाता है।
शाफ्ट पक्ष 3 और 9 में स्थापित बीयरिंगों में घूमता है (छवि। 6.1), असर बीयरिंग कहा जाता है। असर ढालें बोल्ट के साथ फ्रेम 7 (अंजीर। 6.1) से जुड़ी हैं।
रोटर और एसिंक्रोनस मोटर के स्टेटर के बीच एक हवा का अंतर है। एयर गैप चुनते समय, परस्पर विरोधी रुझान का सामना करना पड़ता है। न्यूनतम (यांत्रिक कारणों से चयनित) हवा का अंतर इंजन के नो-लोड वर्तमान में कमी और पावर फैक्टर में वृद्धि की ओर जाता है। हालांकि, एक छोटे से हवा के अंतराल के साथ, स्टेटर और रोटर की सतह परत में अतिरिक्त नुकसान, अतिरिक्त क्षण और इंजन का शोर बढ़ जाता है। घाटे की वृद्धि के कारण, दक्षता घट जाती है। इसलिए, अतुल्यकालिक इंजनों की आधुनिक श्रृंखला में, यांत्रिक कारणों के लिए आवश्यक की तुलना में हवा का अंतर कुछ बड़ा चुना जाता है (ताकि ऑपरेशन के दौरान रोटर स्टेटर को स्पर्श न करे)।
एक अतुल्यकालिक मोटर के संचालन का सिद्धांत दो घटनाओं पर आधारित है: स्टेटर वाइंडिंग की धाराओं द्वारा घूर्णन चुंबकीय क्षेत्र का निर्माण और रोटर वाइंडिंग के शॉर्ट-सर्कुलेटेड कॉइल में प्रेरित धाराओं पर इस क्षेत्र का प्रभाव।
यदि कोई नहीं जानता कि फ्लोरोसेंट लैंप कैसे काम करता है, तो यहां महत्वपूर्ण बिंदु एक विद्युत प्रवाह है, लेकिन इसमें नहीं ...
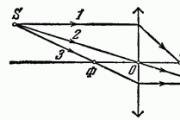
जब चमकदार बिंदु लेंस के साइड ऑप्टिकल अक्ष पर होता है, तो लेंस उसी अक्ष पर अपनी छवि बनाता है ...।

शुक्रवार, 8 अप्रैल, 1994 को स्थानीय समयानुसार सुबह 8.45 बजे, सिएटल पुलिस विभाग था ...
कई रेडियो एमेच्योर मोटर चालक हैं और प्रकृति में दोस्तों के साथ आराम करना पसंद करते हैं, और सभ्यता के लाभों से ...
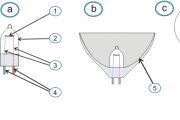
सभी तापदीप्त बल्बों के संचालन का सिद्धांत समान है। एक विद्युत प्रवाह के माध्यम से एक विद्युत प्रवाह, आमतौर पर एक सर्पिल में मुड़ जाता है, ...

ग्राउंडिंग और शून्यिंग: क्या अंतर है? कोई भी विद्युत प्रणाली तीन-चरण एसी नेटवर्क या ...

अतुल्यकालिक मोटर की नियंत्रण इकाई गैर-प्रतिवर्ती (बीएनएन) अनियमित है। नियंत्रण इकाई अतुल्यकालिक ...

संधारित्र क्या है? यह कैसे काम करता है? विश्व के पहले संधारित्र का आविष्कार किसने किया था? - ये सारे सवाल आज हम ...
"ऑप्टिकल इंस्ट्रूमेंट्स" विषय पर प्रस्तुति और यह क्या है? ऑप्टिकल इंस्ट्रूमेंट्स? ऑप्टिकल इंस्ट्रूमेंट्स डिवाइस हैं ...

प्रतीक्षा करें, theca नहीं, चलो थोड़ी बात करते हैं। आप प्रतीक्षा करें, जल्दी मत करो, घोड़ों को मत चलाओ। हम आज शाम आपके साथ हैं अपार्टमेंट में ...
गजप्रोम में दुनिया का सबसे अमीर प्राकृतिक गैस भंडार है। विश्व भंडार में इसकी हिस्सेदारी है ...
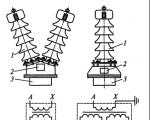
उद्देश्य के आधार पर, विभिन्न कनेक्शन आरेखों के साथ वोल्टेज ट्रांसफार्मर का उपयोग किया जा सकता है ...

रूस के दक्षिण में, DGTU पर ध्यान दें, जिनमें से वार्षिकियां बड़ी संख्या में उत्पादन करती हैं ...
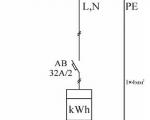
कंपनी "मोंटाज़ेलेत्रो" के विशेषज्ञ कार्यकारी और एकल-रेखा आरेखों का निपटान करते हैं ...
एक पतले लेंस के लिए, एक सूत्र होना अच्छा होगा जो इसके सभी बुनियादी मापदंडों को जोड़ देगा। फोकल लंबाई ...

द्वितीयक घुमाव के घुमावों की संख्या का निर्धारण कैसे करें? गणना करने के लिए माध्यमिक घुमाव के घुमावों की संख्या आवश्यक है ...