
Русские земли и княжества в XII - первой половине XIII в
← 1132 - 1471 Столица Киев Язык(и) Древнерусский Религия Православное христианство Население восточные славяне...
Предназначены для бесконтактного управления электрическими исполнительными механизмами (ЭИМ) с однофазным электродвигателем. Блоки выполняют пуск, реверс, останов электродвигателя в соответствии с дискретными входными сигналами «Больше» и «Меньше».
Блоки управления электродвигателем реверсивные БУЭР 3-30-00, БУЭР 3
Предназначены для бесконтактного управления электрическими исполнительными механизмами (ЭИМ) с трехфазным электродвигателем. Блоки выполняют пуск, реверс, останов электродвигателя в соответствии с дискретными входными сигналами «Больше» и «Меньше», а также защиту силовых ключей от короткого замыкания и настраиваемую защиту асинхронного двигателя от перегрузки.
Блоки питания БП-Г, БП-4М15
Предназначены для питания контроллера нестабилизированным постоянным напряжением 24 В. Блоки выполнены по традиционной схеме с применением понижающего трансформатора и подключаются к сети переменного напряжения 220 В.
Блок питания ББП-24
Предназначен для обеспечения бесперебойного питания контроллера нестабилизированным постоянным напряжением 24 В. Блок содержит преобразователь напряжения на базе понижающего трансформатора, подключаемый к сети переменного напряжения 220 В, аккумуляторную батарею и схему управления, которая обеспечивает безударное переключение подключенного оборудования на резервный источник питания. В конструкции блока использованы аккумуляторы со сроком службы не менее 6 лет без обслуживания.
Блок питания БП-Д
Предназначен для преобразования нестабилизированного напряжения постоянного тока (24±6) В в стабилизированное напряжение постоянного тока 17, 22, 24, 36 В (зависит от исполнения блока), и предназначен для питания датчиков, используемых при построении систем АСУТП с контроллерами серии КОНТРАСТ. Питание блока осуществляется от блоков питания БП-Г, ББП-24, БП-4М15 и др.
Модуль питания МП-Д
Предназначен для питания микроконтроллера ШМК и модулей УСО-Д. В тех случаях, когда мощность одного модуля МП-Д недостаточна для питания всей группы модулей УСО-Д, установленных на шине, предусмотрено подключение к ней нескольких модулей МП-Д.
Блок ввода БВ-Д-50
Предназначен для применения в схемах управления электрическими приводами насосов, запорной арматуры в составе АСУТП. Блок преобразует сигналы состояния контактных устройств в дискретные сигналы логического уровня.
Блок усилителя мощности БУМ-30
Предназначен для усиления мощности выходных дискретных сигналов контроллера и содержит четыре реле, каждое из которых имеет по две группы перекидных контактов и способно коммутировать электрические цепи переменного напряжения 220 В.
Блок БУМ-50
Предназначен для преобразования дискретных сигналов уровня 24 В в релейные сигналы управления силовыми устройствами.
Блок содержит 1 реле (номинальное напряжение обмотки =24 В, потребляемая мощность 0,8 Вт) и имеет один перекидной контакт. Включение реле происходит при подаче постоянного напряжения (=24В) на входные клеммы блока.
Блок переключения БПР-30
Предназначен для переключения цепей выходных сигналов резервированного контроллера. Блок содержит восемь маломощных реле.
Блок БПР-50
Предназначен для переключения сигнальных цепей при резервировании контроллеров, а также для коммутации цепей в схемах защиты, сигнализации, блокировок.
Блок содержит 5 реле (номинальное напряжение обмотки =24 В, потребляемый ток 8 мА), каждое из них имеет по две группы перекидных контактов.
Преобразователь интерфейса ПИ-3
Предназначен для преобразования интерфейса RS-232C/RS-485.
Преобразователь используется для подключения шлюзового канала контроллера к CОМ-порту компьютера и поддержания устойчивой связи на расстоянии до 1,2 км. Преобразователь питается от сети переменного напряжения 220 В и устанавливается в непосредственной близости от компьютера.
Пульт настойки контроллера ПК-302
Предназначен для управления режимами работы контроллера, оперативного контроля и управления технологическими программами, настройки их параметров и параметров контроллера в целом в процессе работы или подготовки к работе
Комплект резисторов нормирующих КРН
Предназначен для подключения сигналов постоянного тока 0-5 мА, 0(4)-20 мА и постоянного напряжения 0-10 В к модулю МАУ-Д. Для подключения сигналов других типов к модулю МАУ-Д комплект КРН не требуется.
Защитное устройство ЗУ
Предназначено для обеспечения неразрывности цепей сигналов постоянного тока 0-5 мА, 0(4)-20 мА, подключенных с соответствующим входам модулей УСО-Д, при демонтаже модулей. Защитное устройство подключается к модулям через промклеммник.
Интерфейсный соединитель ИС-485
Предназначен для организации связи модуля УСО-Д и компьютера через преобразователь интерфейса ПИ-3 при программировании и настройке модуля.
Основные технические данные и характеристики
Конструктивно-технические требования
Виды входных и выходных сигналов, диапазоны изменения, входные сопротивления приведены в таблице 2.4.
Таблица 2.4
|
Вид сигнала, тип модулей |
Диапазон изменения сигнала |
Примечание |
|||
|
входного |
выходного |
||||
|
1 Напряжение и сила постоянно |
сопротивление (50,025) Ом |
||||
|
МВА-Д; МДА-Д | |||||
|
МТС-Д, МАУ-Д | |||||
|
2 Сигналы от ТС * МТС-Д, МАУ-Д |
200... +800 о С 200... +1372 о С 50... +1768 о С 0... +2500 о С 0... +1800 о С 0... +1800 о С 50... +1768 о С 200... +1820 о С 210... +1200 о С 200... +400 о С 200... +1000 о С 200... +1300 о С 200... +100 о С | ||||
|
3 Сигналы от ТR * ТСП 50П(Pt50) W 100 =1,3910 ТСП 100П (Pt100) W 100 =1,3910 ТСП 50П(Pt50) W 100 =1,3850 ТСП 100П(Pt100) W 100 =1,3850 ТСМ 50М(Cu50) W 100 =1,4280 ТСМ 100М(Cu100) W 100 =1,4280 ТСМ 50М(Cu50) W 100 =1,4260 ТСМ 100М(Cu100) W 100 =1,4260 ТСН 100Н(Ni100) W 100 =1,6170 Резистивный датчик МРС-Д, МАУ-Д |
200... +750 о С 200... +750 о С 200... +750 о С 200... +750 о С 200... +200 о С 200... +200 о С 50... +200 о С 50... +200 о С 60... +180 о С | ||||
|
4 Цифровой сигнал |
Rн 2 кОм Rн 0,5 кОм Rн 0,5 кОм |
||||
|
6 Дискретные входные |
(0-7) В –лог. «0» (24±6) В – лог. «1» |
Rвх 4,8кОм |
|||
|
7 Дискретные выходные |
«0»-разомкну тое, «1»-замкнутое состояние транзисторного ключа |
Коммутируемое напряжение ток до 0,3 А |
|||
|
Примечание - * Диапазоны сигналов термопар (ТС) по ГОСТ Р 8.585-2001; сигналов термопреобразователей сопротивления (TR) – по ГОСТ 6651-94. |
|||||
Габаритные размеры блоков и составных частей контроллеров и их масса в соответствии с таблицей 2.5.
Таблица 2.5
|
Наименование |
Габаритные размеры, мм |
Масса, кг, не более |
|
Блок контроллера БК-500 | ||
|
МК-500 с креплением на рейку DIN-35 модуль МЦ модули МЦ, МР 1 , (МР 2) МЦ со встроенным ПО (МР 1 , МР 2) МК-500 с креплением на щит МЦ со встроенным ПО МЦ/ПО, МР 1 (МР 2) |
18068(100)х157 188х143х 48,5(79; 111) 188х162х69(101) | |
|
Шлюзовой микроконтроллер ШМК | ||
|
Блок управления электродвигателем реверсивный БУЭР 1-30-00, БУЭР 3-30-00 БУЭР 1-30-02; БУЭР 3-30-02, -03 БУЭР 1, БУЭР 3 | ||
|
Модуль УСО-Д сдвоенный | ||
|
Модуль УСО-Д одинарный | ||
|
Модуль питания МП-Д | ||
|
Блок питания БП-Д | ||
|
Пульт оператора ПО | ||
|
Блок усиления мощности БУМ-50 | ||
|
Блок ввода дискретный БВ-Д-50 | ||
|
Блок переключения БПР-50 |
Электропитание контроллеров осуществляется от источника постоянного тока с напряжением (246) В, а с блоками питания БП-4М15, БП-Г, ББП-24 - переменным однофазным током напряжением В, частотой (50±1) Гц и коэффициентом высших гармоник до 5 %.
Мощность, потребляемая отдельными блоками и модулями, не превышает значений, указанных в таблице 2.6.
Таблица 2.6
|
Блоки и модули |
Потребляемая мощность, Вт, не более |
Примечание |
|
|
при выходной мощности 15 Вт (5В, 3А) |
|||
|
МАС-Д, МДА-Д одинарный корпус | |||
|
МАС-Д, МДА-Д сдвоенный корпус | |||
|
МРС-Д, МТС-Д, МВА-Д, МАУ-Д одинарный и сдвоенный корпус | |||
|
МСД-Д одинарный корпус | |||
|
МСД-Д сдвоенный корпус | |||
|
МВС-Д одинарный и сдвоенный корпус | |||
Блоки БК-500, ШМК, модули УСО-Д, МП-Д выполнены в корпусах из полимерного материала с установкой на DIN – рейку.
Контроллеры (блоки БК-500) имеют цифровые интерфейсы:
сетевой канал Ethernet;
канал межконтроллерной сети Магистр - интерфейс RS-485;
шлюзовой канал для связи с инженерной станцией или SCADA-системой - интерфейс RS-232/RS-485;
канал для связи с пультом контроллера - интерфейс RS-485;
канал резервирования - интерфейс RS-485;
четыре канала полевой сети - интерфейс RS-485 – для связи с микроконтроллерами и микропроцессорными устройствами как из состава контроллера КР-500 (ШМК, модулями УСО-Д и др.), так и другими, специально разработанными, или других изготовителей. Каждый канал имеет возможность подключения до 31 полевого устройства. Четвертый канал имеет возможность также работать в режиме шлюзового канала, осуществляя связь с инженерной станцией или SCADA-системой.
Шлюзовой микроконтроллер ШМК имеет три интерфейсных канала RS-485: два – для связи с внешними объектами (БК-500 и др.), один – для связи с модулями УСО-Д (до 16 модулей).
Контроллеры содержат энергонезависимый таймер-календарь.
Входы аналоговых сигналов ИК модулей МАС-Д, МДА-Д гальванически разделены друг от друга и от остальных цепей.
Входы аналоговых сигналов ИК модулей МВА-Д, МАУ-Д, МТС-Д МРС-Д гальванически разделены от остальных цепей.
Выходы аналоговых сигналов ИК модулей МАС-Д, МАВ-Д, гальванически разделены друг от друга и от остальных цепей.
Входы дискретных каналов модулей МСД-Д-02, МСД-Д-03, МСД-Д-04, связанные в группу по 4, гальванически разделены от других групп и от остальных цепей.
Выходы дискретных каналов модулей МДА-Д, связанные в группу по 2, гальванически разделены от других групп и от остальных цепей.
Выходы дискретных каналов модулей МСД-Д-00, МСД-Д-01, МСД-Д-02, связанные в группу по 4, гальванически разделены от других групп и от остальных цепей.
Модули МАС-Д, МДА-Д, МАУ-Д. МВА-Д выполняют диагностику аналоговых входных каналов при диапазоне входного сигнала (4-20) мА. При обрыве линии связи с датчиком выдается сигнал ошибки.
Модули МАС-Д, МАВ-Д выполняют диагностику аналоговых выходных каналов. При изменении выходного сигнала на 3 % от заданного формируется сигнал ошибки.
Модули МСД-Д-02, МСД-Д-03, МСД-Д-04 выполняют диагностику линий связи входных дискретных каналов.
Выходы дискретных каналов модулей МДА-Д, МСД-Д-00, МСД-Д-01, МСД-Д-02 имеют защиту от короткого замыкания, модули выполняют диагностику короткого замыкания.
Модуль МДА-Д выполняет диагностику включения и выключения выходов.
При отказе блока БК-500 формируется на выходе дискретный сигнал "отказ".
После отключения от сети питания контроллеры сохраняют оперативную информацию (текущие значения алгоритмов), а также поддерживают работу таймера-календаря на время не менее 24 часов.
Контроллеры при электропитании от блока питания ББП-24 работают не менее 30 минут после отключения ББП-24 от сети питания ( 220 В, 50 Гц).
Режим работы контроллеров непрерывный.
Время установления рабочего режима 5 минут, при преобразовании аналоговых сигналов с заданной погрешностью не более одного часа.
В данном разделе представлены устройства управления малогабаритными электродвигателями постоянного тока (электродвигатели диаметром от 3 до 95 мм, мощностью от 0,001 Вт до 1100 Вт), включающие в себя силовой каскад, электронику для обработки сигналов обратной связи, набор цифровых и аналоговых входов и выходов, интерфейсы для работы в сети по различным промышленным протоколам.
Вы можете ознакомиться с электронными блоками управления, выпускаемыми производителями малогабаритных электроприводов для электродвигателей своего и стороннего изготовления, в соответствующих разделах (см. ссылки): (для коллекторных, бесколлекторных двигателей постоянного тока, ), Dunkermotoren (для коллекторных, бесколлекторных двигателей постоянного тока), Nanotec (для бесколлекторных, шаговых двигателей), Phytron (для шаговых двигателей).
В линейке контроллеров Phytron можно выделить многоосевые модульные контроллеры phyMotion™ (см. по ссылке). Эти изделия предназначены для управления от 1 до 18 биполярными шаговыми двигателями в особых условиях - есть поддержка обратной связи от датчиков температуры для двигателей, расположенных в вакууме, а также сигналов обратной связи по EnDat, SSI. Данные контроллеры работают по одному из распространённых промышленных протоколов Ethernet, ProfiBus/ProfiNet, CAN, RS 485, RS 232, RS 422.
Ознакомиться с описанием всей продукции компании Phytronможно по .
ООО «Микропривод» предлагает блоки управления коллекторными, бесколлекторными двигателями постоянного тока, а также шаговыми двигателями от компании Copley Controls с расширенным набором обрабатываемых сигналов обратной связи и более высокими выходными мощностями (рабочий ток до 30А, пиковый ток до 60А).
Перечень сигналов обратной связи, охватываемых
продукцией Copley Controls :Данные контроллеры позволяют управлять двигателями по скорости, положению, моменту, в режимах Camming, Gearing, по индексному сигналу.
Также возможно приобретение защищённых версий контроллеров, предназначенных для работы в неблагоприятных условиях при повышенных вибрационных, ударных нагрузках и расширенном температурном диапазоне.
Ознакомиться с описанием всей продукции компании Copley Controls можно по
Н. ШУКОВ, г. Гомель, Беларусь
Бытовые швейные машины нередко электрифицируют, устанавливая коллекторный двигатель МШ-2, питаемый от сети переменного тока 220 В, 50 Гц. Управление этим двигателем с помощью штатной педали ненадежно, кроме того, ее не всегда удается приобрести. В предлагаемой конструкции применена самодельная педаль, снабженная оптическим датчиком положения, причем резкое нажатие на нее вызывает форсированный разгон двигателя. Заданная педалью частота вращения не изменяется под характерной для швейных машин переменной нагрузкой на вал двигателя. Имеется возможность ограничить максимальную частоту, причем порог ограничения можно регулировать в процессе шитья.
Схема блока управления (без силовых узлов) изображена на рис. 1.

Датчиком частоты вращения вала двигателя служит оптрон с открытым оптическим каналом U1, сигналы которого усиливают и формируют транзистор VT1 и триггер Шмитта DD1.1. Как показано на рис. 2,
![]()
На корпусе 1 электродвигателя закреплена винтом 2 небольшая плата. Установленный на ней оптрон 3 входит в специально просверленное отверстие корпуса 1. Оптическое окно оптрона должно находиться на расстоянии 1 ...2 мм от насаженной на вал 5 крыльчатки вентилятора 4. На обращенную к оптрону поверхность крыльчатки нанесена маска (см. рис. 2, вид А на деталь4).
Ее рисуют черной и белой красками. Можно также, зачернив поверхность, наклеить на нее полоски фольги. Корректировкой положения оптрона относительно крыльчатки и подборкой номинала резистора R3 добиваются максимального размаха импульсов на коллекторе транзистора VT1 при вращении вала двигателя.
Всего на маске 16 светлых секторов, в результате за один оборот вала на вход одновибратора DD2.1 поступают 16 импульсов. В ответ на каждый из них однови братор генерирует импульс фиксированной амплитуды и длительности, поэтому постоянная составляющая напряжения на выходе одновибратора пропорциональна частоте вращения. Усиленная и отфильтрованная каскадом на ОУ DA4 постоянная составляющая служит сигналом обратной связи в системе стабилизации частоты вращения. Крутизну зависимости напряжения от частоты устанавливают подстроечным резистором R12.
Конструкция педали показана на рис. 3.
Ее подвижная часть 2 и неподвижное основание 1 соединены пружиной 3, противодействующей нажатию. Оптрон 4 (U2 аналогичный U1, см. рис. 1) размещен на основании 1. В зависимости от расстояния от оптрона 4 до отражателя 5, установленного на подвижной части 2, изменяется количество излученного светодиодом оптрона 4 света, вернувшегося к чувствительной поверхности его фототранзистора. В результате изменяется ток фототранзистора. Каскад на микросхеме DA1 преобразует ток в напряжение. Номинал резистора R7 выбран таким, что полному ходу педали соответствует изменение напряжения на выходе DA1 от 0 приблизительно до -8 В.
ОУ DA2 - элемент сравнения и усилитель сигнала ошибки системы стабилизации. На его входы поступают сигналы, пропорциональные скорости вращения и положению педали, а выходное напряжение через диод VD5 подано на вход 3 ОУ DA3, служащего компаратором.
Вход 3 компоратора соединен с генератором пилообразного напряжения, состоящего из диодного мостаVD1-VD4 и каскада на транзисторе VT2.
На мост подано пониженное до 6 вольт сетевое напряжение. В моменты перехода сетевого напряжения через ноль, когда все диоды моста закрыты, а транзистор VT2 открыт током, текущим через резистор R6, конденсатор С1 заряжается почти до напряжения питания. В остальную часть каждого полупериода мгновенное значение сетевого напряжения отличается от нуля, поэтому выпрямленное мостом положительное напряжение, поступая на базу транзистора VT2, удерживает последний в закрытом состоянии. Конденсатор С1 разряжается через резистор R10. Подборкой номинала этого резистора добиваются, чтобы напряжение на конденсаторе не опускалось ниже приблизительно 0,2 В. Иначе вал двигателя будет продолжать вращаться и при отпущенной педали.
Спады импульсов на выходе DA3 совпадают с моментами переходов сетевого напряжения через ноль, а положение фронтов на оси времени зависит от напряжения на выходе ОУ DA2. Через диод VD6 и резистор R25 импульсы поступают на базу транзистора VT4, в коллекторной цепи которого находятся светодиод оптотиристора U3.1 и ограничительный резистор R28.
На рис. 4 показана схема силовой части блока управления, нумерация ее элементов продолжает начатую на рис. 1.
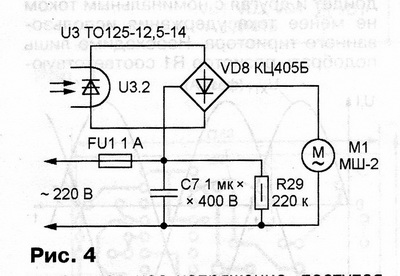
Тиристор U3.2 в диагонали моста VD8 открывается в каждом полупериоде с началом светового импульса, создаваемого светодиодом U3.1. На электродвигатель Ml, включенный во вторую диагональ моста VD8, поступает сетевое напряжение. Тем, что открывающий тиристор световой импульс продолжается до конца полупериода, предотвращают преждевременные (до окончания полупериода) закрывания тиристора из-за свойственных коллекторным двигателям кратковременных нарушений контакта в щеточном узле.
Вернемся к рис. 1. Кроме узлов, рассмотренных выше, в устройстве имеется ограничитель среднего значения напряжения, подаваемого на двигатель. Ограничитель состоит из одновибратора DD2.2 и транзисторного ключа VT3. Спад каждого управляющего импульса (совпадающий по времени с нулевым мгновенным значением сетевого напряжения) запускает одновибратор DD2.2, импульсы которого открывают транзистор VT3. В результате транзистор VT4, а с ним и оптотиристор U3 не могут открыться, пока импульс одновибратора не закончится. За счет этого среднее напряжение на двигателе не может превысить значения, зависящего от положения движка переменного резистора R24.
Практика показала, что нередко при слишком низком пороге ограничения двигатель не может стартовать под нагрузкой, хотя нормально работает после предварительного разгона. В связи с этим обстоятельством предусмотрен узел принудительного отключения ограничителя, собранный на ОУ DA5. Пока напряжение на выводе 6 DA4, пропорциональное частоте вращения, по абсолютной величине меньше порога, установленного подстроечным резистором R20, напряжение на выходе DA5 - отрицательное, диод VD7 закрыт и низкий логический уровень напряжения на входе R одновибратора DD2.2 запрещает работу последнего, позволяя двигателю уверенно стартовать. С ростом частоты вращения низкий уровень на входе R DD2.2 сменяется высоким, разрешая работу одновибратора.
Блок можно питать от любого стабилизированного источника с выходными напряжениями +9 и -9 В, способного отдавать ток не менее 100 мА по цепи положительного напряжения и 30 мА - отрицательного. Переменное напряжение 6 В подают на диодный мост VD1- VD4 от отдельной вторичной обмотки сетевого трансформатора. Если такой обмотки нет, можно воспользоваться дополнительным понижающим трансформатором, дающим нужное напряжение.
В блоке использованы постоянные резисторы МЛТ, переменный R24 - СП-1; подстроечные R12, R20 - СПО-0,15. Конденсаторы С1, С3, С5 - металлопленочные, С7 - МБГЧ, оксидные С2, С4, С6 - К50-35. Транзисторы КТ502В можно заменить на КТ502А, КТ502Д, КТ502Е, КТ361Б, КТ361В, КТ361Г, а КТ503В - на КТ503А, КТ503Д, КТ503Е, КТ315Б, КТ315В, КТ315Г. Вместо микросхемы К564АГ1 подойдет ее зарубежный аналог CD4098B, вместо КР140УД608 - К140УД6, К140УД7, КР140УД708. Диодный мост КЦ405Б можно заменить на КЦ402А, КЦ403А, КЦ403Б, КЦ403В, диоды КД509А - на КД503А, КД510А, КД518А.
Ненагруженный двигатель МШ-2 при номинальном питающем напряжении может развить очень высокую скорость (до 20000 об/мин). Поэтому желательно, чтобы во время налаживания блока управления двигатель был механически нагружен приводом швейной машины, работающей вхолостую (без ткани и ниток). Для швейных машин большинства типов максимальная частота вращения вала двигателя в этих условиях - приблизительно 3000 об/мин, что соответствует частоте повторения импульсов одновибратора DD2. 1800 Гц.
Длительность этих импульсов должна составлять 0,8 мс. Если при максимальной частоте вращения вала двигателя входит в насыщение ОУ DA4, длительность нужно уменьшить. Ее корректируют подборкой номинала резистора R16. Длительность импульсов одновибратора DD2.2 должна с помощью переменного резистора R24 изменяться в интервале 2...6 мс.
Нажав на педаль до упора и перемещая движок подстроечного резистора R12 слева (по схеме) направо, установите его в положение, начиная с которого частота вращения вала двигателя уменьшается. Подстроечный резистор R20 регулируют по наиболее уверенному пуску двигателя под нагрузкой.
Если налаживать блок управления приходится с ненагруженным двигателем, обороты последнего можно уменьшить до необходимых 3000 с-1 с помощью переменного резистора R24, при необходимости временно изменив номиналы его и резистора R22.
Блок управления асинхронным электродвигателем нерегулируемый нереверсивный (БНН).
Блок управления асинхронным электродвигателем нерегулируемый реверсивный (БНР) .
Блок автоматического ввода резерва (БАВР).
Блоки рассчитаны для управления электродвигателями с номинальным током статора до 100А, при напряжении 380В переменного тока частотой 50 Гц.
Аппаратный состав.
В блоках в основном применяются отечественное оборудование:
Автоматические выключатели типов АЕ1031, АЕ2036, АЕ2046, АЕ2056, ВА57-35;
Магнитные пускатели типа ПМЛ1100…ПМЛ4100, ПМЛ1501…ПМЛ4500, ПМ12-100;
Тепловые реле типа РТЛ, РТТ.
По требованию заказчика шкафы могут комплектоваться аппаратурой фирм ABB, Schneider, ИЭК и других.
Блоки управления, входящие в состав щита ЩУ-ЧЭ, можно разделить на три функциональные группы:
|
1. Блоки управления агрегатами (насосами, вентиляторами, задвижками). Блоки предназначены непосредственно для управления агрегатами и содержат всю необходимую пускозащитную аппаратуру (автоматический выключатель, магнитный пускатель, тепловое реле). Блок устанавливается для каждого агрегата. К этим блокам относятся блоки БНН, БНР, БРП, БТЗ. Блоки БНН, БНР, БТЗ работают автономно, блок БРП требует подключения к блоку регулирования БПЧ. Блоки могут управлять агрегатом как в местном режиме (кнопками на лицевой панели или на выносном кнопочном посте), так и в дистанционном (автоматическом) режиме под управлением системы автоматизации теплового пункта (система автоматизации подключается к клеммнику цепей управления блока). Выбор режима управления осуществляется переключателем на лицевой панели блока. Включение агрегата показывается лампой на лицевой панели. 2. Блок регулирования – блок БПЧ.
Этот блок предназначен для регулирования частоты вращения электродвигателей. Блок содержит электронный регулирующий прибор – преобразователь частоты, силовую коммутационную аппаратуру и логическое устройство, управляющее работой преобразователя частоты и магнитных пускателей, а также осуществляющие контроль за исправностью преобразователя. 3. Вспомогательные блоки. К этим блокам относится блок АВР. Устанавливается обычно в шкафу ШПЧ, один блок на весь тепловой пункт. Обеспечивает питанием систему автоматизации теплового пункта, пожарную электрозадвижку, цепи аварийного освещения. |
Лицевая панель блоков БПП, БРП, БТЗ
Лицевая панель блока БПЧ2 (на 2 насоса) |
Блок управления асинхронным электродвигателем нерегулируемый нереверсивный (БНН) предназначен для управления механизмами с нереверсивными асинхронными электродвигателями (насосы, вентиляторы и т.п.). Блок обеспечивает защиту цепей электродвигателя от коротких замыканий (с помощью автоматического выключателя) и защиту от перегрузки по току (с помощью теплового реле). Блок обеспечивает управление электродвигателем в двух режимах – местном и дистанционном. В местном режиме управление осуществляется от кнопок на двери щита, в дистанционном – от системы автоматизации ЦТП.
Схема силовых цепей блока |
На переключателе выбора режима предусмотрен контакт, информирующий систему автоматизации ЦТП о выборе дистанционного режима управления. В схеме блока предусмотрено подключение выключателя безопасности, устанавливаемого рядом с управляемым электродвигателем. | |
 |
 Схема подключения блока для работы сприбором «Текон» |
|
Блок управления асинхронным электродвигателем нерегулируемый реверсивный (БНР) предназначен для управления механизмами с реверсивными асинхронными электродвигателями (электрозадвижки, регулирующие вентили и т.п.). Блок обеспечивает защиту цепей электродвигателя от коротких замыканий (с помощью автоматического выключателя) и защиту от перегрузки по току (с помощью теплового реле). Блок обеспечивает управление электродвигателем в двух режимах – местном и дистанционном. В местном режиме управление осуществляется от кнопок, установленных рядом с управляемым механизмом, в дистанционном – от системы автоматизации ЦТП. В схеме блока предусмотрена возможность подключения концевых выключателей, отключающих электродвигатель при достижении механизмом конечных положений. В схеме блока предусмотрено подключение выключателя безопасности, устанавливаемого рядом с управляемым электродвигателем.
Блок управления частотно-регулируемым электроприводом (БРП) предназначен для управления нереверсивными асинхронными электродвигателями (насосы, вентиляторы и т.п.) с возможностью регулирования частоты вращения управляемого электродвигателя. Блок предназначен для совместной работы с блоком управления преобразователем частоты (БПЧ). Блок обеспечивает защиту цепей электродвигателя от коротких замыканий (с помощью автоматического выключателя) и защиту от перегрузки по току (с помощью теплового реле), а также защиту цепей питания преобразователя частоты (с помощью автоматического выключателя). Блок обеспечивает управление электродвигателем в двух режимах – местном и дистанционном. В местном режиме управление осуществляется от кнопок на двери щита (имеется возможность включения насоса в регулируемом и нерегулируемом режиме), в дистанционном – от системы автоматизации ЦТП. На переключателе выбора режима предусмотрен контакт, информирующий систему автоматизации ЦТП о выборе дистанционного режима управления. В схеме блока предусмотрено подключение выключателя безопасности, устанавливаемого рядом с управляемым электродвигателем.
Блок управления преобразователем частоты (БПЧ) предназначен для регулирования частоты вращения асинхронного электродвигателя путем изменения величины и частоты подаваемого на электродвигатель напряжения. Блок устанавливается один на группу насосных агрегатов (ХВС, ГВС или ЦНО) и работает совместно с блоками управления частотно-регулируемым электроприводом (БРП). Блок обеспечивает регулирование частоты электродвигателя в зависимости от давления на выходе группы насосных агрегатов (ХВС, ГВС) или перепада давления на насосном агрегате (ЦНО). Задание требуемого давления (перепада) осуществляется с помощью цифро-аналогового задатчика, установленного на двери щита. В схеме блока предусмотрена возможность переключения электродвигателя в нерегулируемый режим при неисправности преобразователя частоты. Включение насоса в нерегулируемом режиме отображается лампой на двери щита.
 Схема силовых цепей блока БПЧ2 (на 2 насоса) |
 Схема подключения блока БПЧ2 (на 2 насоса) |
 БПЧ3 (на 3 насоса) |
 Схема подключения блока БПЧ3 (на 3 насоса) |
Для насосов ХВС, ГВС, пожарных и т.п. устанавливается один датчик давления на группу. Он подключается к клеммам 21(+), 22(-) блока БПЧ2, 31(+), 32(-) блока БПЧ3.
Для насосов ЦНО устанавливается два датчика давления – на входе и выходе группы насосных агрегатов. Датчик на выходе насосов подключается к клеммам 21(+), 22(-) блока БПЧ2, 31(+), 32(-) блока БПЧ3, датчик на входе насосов подключается к клеммам 23 (+), 24(-) блока БПЧ2, 33(+), 34(-) блока БПЧ3.
Блок управления асинхронным электродвигателем с пуском двигателя методом звезда-треугольник (БТЗ).
 Схема силовых цепей |
Блок аналогичен блоку БНН, но имеет дополнительный магнитный пускатель, осуществляющий перекоммутацию обмоток электродвигателя со звезды на треугольник в процессе разгона через заданную выдержку времени (1..30сек). Применяется для электродвигателей, рассчитанных на напряжение 380/660В – например, по требованию фирмы Grundfos, насосы мощностью 5,5кВт и более должны пускаться методом звезда-треугольник. |
|
 |
 |
|
Блок автоматического ввода резерва (БАВР) предназначен для автоматического переключения нагрузки на резервный ввод при неисправности (исчезновение напряжение, обрыв одной из фаз, неправильное чередование фаз) основного. Блок устанавливается в шкафу ШПЧ, в шкафах РШУ-1 и РШУ-2 устанавливаются автоматические выключатели, к которым подключают вводные линии блока.
Блоки БНН и БРП имеют дополнительные исполнения:
БНН-Т и БРП-Т – в типовые блоки добавлен модуль позисторной защиты (электронный блок, отключающий насос при перегреве термодатчика, встроенного в обмотки двигателя; применяется с насосами Grundfos).
БНН-П и БРП-П – в типовые блоки добавлено устройство плавного пуска электродвигателя (для БРП – в цепь работы насоса от сети).
БНН-ПТ и БРП-ПТ – в блоки добавлены и модуль позисторной защиты и устройство плавного пуска.
Параметры блоков управления БНН, БРП и БНР приведены в таблице:
| Типовой индекс | Мощность подключаемого двигателя, кВт | Номинальный ток, А | Пределы регулирования теплового реле | Автоматический выключатель | Пускатель | Тепловое реле |
| 01 | 0,18 | 0,66 | 0,61-1 | AE2036M 1,6А | ПМЛ1100 | РТЛ-1005 |
| 02 | 0,37 | 1,2 | 0,95-1,6 | AE2036M 2А | ПМЛ1100 | РТЛ-1006 |
| 03 | 0,75 | 1,7 | 1,5-2,6 | AE2036M 3,15А | ПМЛ1100 | РТЛ-1007 |
| 03 | 1,5 | 3 | 2,4-4 | AE2036M 4А | ПМЛ1100 | РТЛ-1008 |
| 05 | 2,2 | 5 | 3,8-6 | AE2036M 8А | ПМЛ1100 | РТЛ-1010 |
| 06 | 3,0 | 6 | 5,5-8 | AE2036M 8А | ПМЛ1100 | РТЛ-1012 |
| 07 | 4,0 | 8 | 7-10 | AE2036M 10А | ПМЛ1100 | РТЛ-1014 |
| 08 | 5,5 | 11 | 9,5-14 | AE2036M 16А | ПМЛ1100 | РТЛ-1016 |
| 09 | 7,5 | 15 | 13-19 | AE2036M 20А | ПМЛ2100 | РТЛ-1021 |
| 10 | 11,0 | 21 | 18-25 | AE2046M 31,5А | ПМЛ2100 | РТЛ-1022 |
| 11 | 15,0 | 29 | 23-32 | AE2046M 40А | ПМЛ3100 | РТЛ-2053 |
| 12 | 18,5 | 36 | 30-41 | AE2046M 50А | ПМЛ3100 | РТЛ-2055 |
| 13 | 22,0 | 43 | 38-52 | AE2046M 63А | ПМЛ4100 | РТЛ-2057 |
| 14 | 25,0 | 49 | 47-64 | AE2046M 63А | ПМЛ4100 | РТЛ-2059 |
| 15 | 30,0 | 59 | 54-74 | AE2056MM 80А | ПМЛ4100 | РТЛ-2061 |
| 16 | 37,0 | 73 | 75 | ПМ 12-100 | РТТ-ЗП | |
| 17 | 45,0 | 90 | 100 | ВА57-35 125А | ПМ 12-100 | РТТ-ЗП |
В данной таблице указана пуско-защитная аппаратура отечественного производства.

← 1132 - 1471 Столица Киев Язык(и) Древнерусский Религия Православное христианство Население восточные славяне...

Если во сне Вы просыпали на пол крупу, то Вас ждут потери. Для беременной женщины такой сон может быть предупреждением о...

Суп картофельный вегетарианскийПpодукты: 700 г каpтофеля, 1,4 л воды, 40 г сливочного масла, 2 яйца, 100 г сметаны, 0,5...

Современные понятия о красоте требуют от девушек серьезных усилий для достижения идеальной фигуры. Еще недавно параметры...

Думаете над тем, что приготовить на завтрак или ужин? Обратите внимание на гречку. Эта каша сытная и очень полезная....

Приготовление индюшачьего шашлыка: Филе промойте, обсушите, нарежьте поперёк волокон крупными кусками.Луковицу очистите,...

Домашняя выпечка - это нечто особенное, что придает дому особый аромат и атмосферу. Пожалуй, нет ничего...

Меланин является природным пигментом, придающим волосам, коже и радужной оболочке глаз человека их уникальный и...

Воинские звания в Иностранном легионе. Примечание: Галон - знак отличия во французской армии надеваемый на...

Существуют интересные и необычные приметы про змей. Их стоит знать, ведь, кто знает, где можно столкнуться с...
Огромное влияние человека на природу и масштабные последствия его деятельности послужили основой для создания...

Родился 11 мая 1946 г. В 1966 г. окончил Ярославское военное училище имени А.В. Хрулева и был назначен в СибВО...

Боевой путь 42-й гвардейской Евпаторийской Краснознаменной мотострелковой дивизии История 42-й гвардейской...
Человек как продукт биологической, социальной и культурной эволюции Появление человека Научное исследование...

Если во сне Вы просыпали на пол крупу, то Вас ждут потери. Для беременной женщины такой сон может быть...

Суп картофельный вегетарианскийПpодукты: 700 г каpтофеля, 1,4 л воды, 40 г сливочного масла, 2 яйца, 100 г...